Inhaltsverzeichnis
Werbung
Quicklinks
Werbung
Kapitel
Inhaltsverzeichnis

Verwandte Anleitungen für Beckhoff EL70 1 Serie














Inhaltszusammenfassung für Beckhoff EL70 1 Serie
- Seite 1 Dokumentation EL70x1 Schrittmotorklemmen Version: Datum: 06.08.2019...
-
Seite 3: Inhaltsverzeichnis
Produktübersicht Schrittmotorklemmen..................... 7 Hinweise zur Dokumentation ...................... 7 Sicherheitshinweise ........................... 9 Ausgabestände der Dokumentation .................... 10 Versionsidentifikation von EtherCAT-Geräten ................. 11 1.5.1 Beckhoff Identification Code (BIC)................... 15 2 Produktübersicht ............................. 17 EL7031 - Einführung........................ 17 EL7031 - Technische Daten ...................... 19 EL7041 - Einführung........................ 20 EL7041-x00x - Technische Daten .................... 23 Technologie ............................. 24... - Seite 4 Inhaltsverzeichnis 5.2.3 TwinCAT ESI Updater .................... 103 5.2.4 Unterscheidung Online/Offline.................. 103 5.2.5 OFFLINE Konfigurationserstellung ................ 104 5.2.6 ONLINE Konfigurationserstellung.................. 109 5.2.7 EtherCAT Teilnehmerkonfiguration ................ 117 Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves ............ 127 Einbindung in die NC-Konfiguration .................... 135 Konfiguration der wichtigsten Parameter.................. 139 Grundlagen zum Positioning Interface .................. 148 5.6.1 Predefined PDO Assignment..................
- Seite 5 Inhaltsverzeichnis 5.11.4 Eingangsdaten....................... 227 5.11.5 Ausgangsdaten...................... 228 5.11.6 Informations-/Diagnosedaten (kanalspezifisch)............. 228 5.11.7 Hersteller-Konfigurationsdaten (gerätespezifisch)............ 229 5.11.8 Informations-/Diagnosedaten (gerätespezifisch) ............ 229 5.11.9 Standardobjekte...................... 230 6 Diagnose - Diag Messages ........................ 238 Definition............................ 238 Implementierung TwinCAT System Manager ................ 239 Interpretation .......................... 239 7 Anhang .............................. 242 EtherCAT AL Status Codes ...................... 242 Firmware Kompatibilität ......................... 242 Firmware Update EL/ES/ELM/EM/EPxxxx .................. 244...
- Seite 6 Inhaltsverzeichnis Version: 4.6 EL70x1...
-
Seite 7: Vorwort
Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. EL70x1 Version: 4.6... - Seite 8 Vorwort Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind verboten, soweit nicht ausdrücklich gestattet. Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmuster- oder Geschmacksmustereintragung vorbehalten.
-
Seite 9: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 10: Ausgabestände Der Dokumentation
Vorwort Ausgabestände der Dokumentation Version Kommentar - Kapitel „Vorwort“ aktualisiert - Strukturupdate - Kapitel „Allgemeine Anschlussbeispiele“ aktualisiert - Kapitel „Vorwort“ aktualisiert - Update Revisionsstand - Strukturupdate - Kapitel „Technische Daten“ aktualisiert - Update Revisionsstand - Strukturupdate - Kapitel „Technische Daten“ aktualisiert - Kapitel „UL Hinweise –... -
Seite 11: Versionsidentifikation Von Ethercat-Geräten
Dokumentation angegeben. Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL- Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“. -
Seite 12: Abb. 1: El5021 El-Klemme, Standard Ip20-Io-Gerät Mit Seriennummer/ Chargennummer Und Revisionskennzeichnung (Seit 2014/01)
Vorwort KK - Produktionswoche (Kalenderwoche) YY - Produktionsjahr FF - Firmware-Stand HH - Hardware-Stand Beispiel mit Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 - Hardware-Stand 02 Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehe jeweilige Gerätedokumentation): Syntax: D ww yy x y z u D - Vorsatzbezeichnung... -
Seite 13: Abb. 2 Ek1100 Ethercat Koppler, Standard Ip20-Io-Gerät Mit Seriennummer/ Chargennummer
Vorwort Abb. 2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer Abb. 3: CU2016 Switch mit Seriennummer/ Chargennummer Abb. 4: EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418 EL70x1 Version: 4.6... -
Seite 14: Abb. 5 Ep1258-00001 Ip67 Ethercat Box Mit Chargennummer/ Datecode 22090101 Und Eindeuti- Ger Seriennummer 158102
Vorwort Abb. 5: EP1258-00001 IP67 EtherCAT Box mit Chargennummer/ DateCode 22090101 und eindeutiger Seriennummer 158102 Abb. 6: EP1908-0002 IP67 EtherCAT Safety Box mit Chargennummer/ DateCode 071201FF und eindeutiger Seriennummer 00346070 Abb. 7: EL2904 IP20 Safety Klemme mit Chargennummer/ DateCode 50110302 und eindeutiger Seriennummer 00331701 Abb. 8: ELM3604-0002 Klemme mit eindeutiger ID-Nummer (QR Code) 100001051 und Seriennummer/ Chargennummer 44160201 Version: 4.6... -
Seite 15: Beckhoff Identification Code (Bic)
Vorwort 1.5.1 Beckhoff Identification Code (BIC) Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff Produkten zur eindeutigen Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016. -
Seite 16: Abb. 10 Aufbau Des Bics
Die Datenidentifikatoren sind zur besseren Darstellung jeweils rot markiert: Abb. 10: Aufbau des BICs Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr. 2). Die BTN ist eine eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen Seriennummern- Systeme bei Beckhoff ersetzen wird (z. -
Seite 17: Produktübersicht
Produktübersicht Produktübersicht EL7031 - Einführung Abb. 11: EL7031 Schrittmotorklemme, 24 V , 1,5 A Die EtherCAT-Klemme EL7031 ist für den direkten Anschluss unterschiedlich kleiner Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der EtherCAT-Klemme untergebracht. Mit einigen Parametern kann die EL7031 an den Motor und die Anwendung angepasst werden. - Seite 18 Produktübersicht ◦ Konfiguration der wichtigsten Parameter • Kapitel "Konfiguration mit dem TwinCAT System Manager", ◦ Objektbeschreibung und Parametrierung [} 173] Anwendungsbeispiel • Kapitel "Inbetriebnahme", ◦ Anwendungsbeispiel [} 168] Version: 4.6 EL70x1...
-
Seite 19: El7031 - Technische Daten
Produktübersicht EL7031 - Technische Daten Technische Daten EL7031 Anzahl Ausgänge 1 Schrittmotor, 2 Phasen Spannungsversorgung für Endstufe (über Power- 24 V (-15% / +20%) kontakte) Rückwirkungsfreiheit ja (siehe Hinweis) Anzahl Eingänge Versorgungsspannung 24 V über die Powerkontakte, über den E-Bus Ausgangsstrom 1,5 A (überlast- und kurzschlussfest) Maximale Schrittfrequenz 1.000, 2.000, 4.000 oder 8.000 Vollschritte/s (konfigurierbar) Schrittmuster... -
Seite 20: El7041 - Einführung
Produktübersicht EL7041 - Einführung Abb. 12: EL7041-0000 Abb. 13: EL7041-0001 Version: 4.6 EL70x1... -
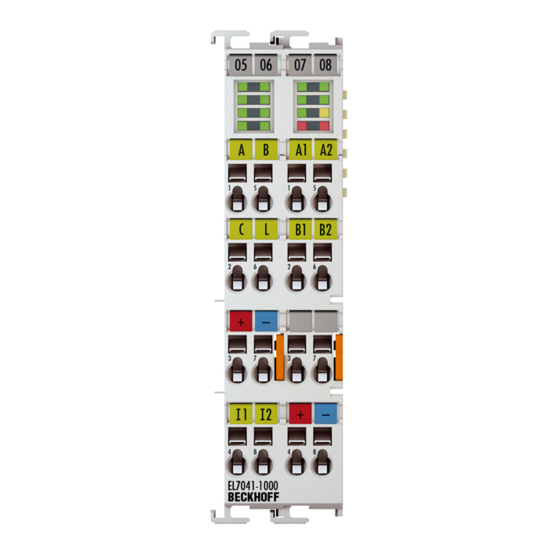
Seite 21: Abb. 14 El7041-1000
Produktübersicht Abb. 14: EL7041-1000 Schrittmotorklemme, 50V , 5 A, mit Inkremental-Encoder Die EtherCAT-Klemme EL7041-x00x ist für den mittleren Leistungsbereich von Schrittmotoren vorgesehen. Die PWM-Endstufen decken einen großen Spannungs- und Strombereich ab. Sie sind, zusammen mit zwei Eingängen für Endlagenschalter, in der EtherCAT-Klemme untergebracht. Mit einigen Parametern kann die EL7041-x00x an den Motor und die Anwendung angepasst werden. - Seite 22 Produktübersicht Anwendungsbeispiel • Kapitel "Inbetriebnahme", ◦ Anwendungsbeispiel [} 168] Version: 4.6 EL70x1...
-
Seite 23: El7041-X00X - Technische Daten
Produktübersicht EL7041-x00x - Technische Daten Technische Daten EL7041-0000 EL7041-0001 EL7041-1000 Anzahl Ausgänge 1 Schrittmotor, 2 Phasen Anzahl digitale Eingänge 2 Endlage, 4 für ein Geber- 1 Endlage, 4 für ein Geber- 2 Endlage, 4 für ein Gebersystem system system Anzahl digitale Ausgänge 1 Ausgang, 24 VDC;... -
Seite 24: Technologie
Kosten und Baugröße zu reduzieren und um Drehmoment und Zuverlässigkeit zu steigern. Mit der Entwicklung der EtherCAT-Klemmen EL7031 und EL7041 für das Beckhoff EtherCAT-Klemmen- System erschließen sich neue Anwendungsfelder. Der Einsatz von Microstepping und neuester Halbleitertechnologie bietet viele Vorteile: •... - Seite 25 Beschleunigungsrampe und der maximalen Frequenz, an eine Position fahren. Realisierung von anspruchsvolleren Positionieraufgaben Anspruchsvollere Positionieraufgaben lassen sich mit Hilfe der Beckhoff-Automatisierungssoftware TwinCAT realisieren. Die beiden Schrittmotorklemmen werden, wie andere Achsen, via TwinCAT System Manager eingebunden und sind wie übliche Servoachsen zu nutzen. Besondere Eigenarten des Schrittmotors, wie Rücknahme der Drehzahlvorgabe bei zu großem Schleppfehler, werden automatisch durch die Option...
- Seite 26 Produktübersicht Unterschreitet die Versorgungsspannung die Nennspannung, kann die Leistungsendstufe den Strom nicht mehr in voller Höhe einprägen und ein Drehmomentverlust ist die Folge. Erstrebenswert sind ein kleiner Wicklungswiderstand und eine hohe Versorgungsspannung, um die Erwärmung gering zu halten und ein möglichst hohes Drehmoment bei hohen Drehzahlen zu erreichen.
- Seite 27 Produktübersicht weiteren Kräften oder Drehmomenten. An der Motorwelle ergibt sich während der Positionierung die Summe aller Kräfte und Drehmomente. Das Ergebnis ist ein Geschwindigkeits-/Drehmomentverlauf, den der Motor zu erbringen hat. 6. Aus der Drehmomentkennlinie ist der Motor zu ermitteln, der die Mindestanforderungen erfüllt. Das Trägheitsmoment des ermittelten Motors ist zum gesamten Antrieb zu addieren.
-
Seite 28: Grundlagen Der Kommunikation
Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten von Beckhoff sowohl symmetrisch (1:1) belegte als auch Cross-Over-Kabel verwenden. Empfohlene Kabel Geeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Website! E-Bus-Versorgung Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, i.d.R. -
Seite 29: Allgemeine Hinweise Zur Watchdog-Einstellung
Grundlagen der Kommunikation Abb. 15: Systemmanager Stromberechnung HINWEIS Fehlfunktion möglich! Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepoten- tial erfolgen! Allgemeine Hinweise zur Watchdog-Einstellung Die ELxxxx Klemmen sind mit einer Sicherungseinrichtung (Watchdog) ausgestattet, die z.B. bei unterbrochenem Prozessdatenverkehr nach einer voreinstellbaren Zeit die Ausgänge in einen sicheren Zustand schaltet, in Abhängigkeit vom Gerät und Einstellung z.B. -
Seite 30: Abb. 16 Karteireiter Ethercat -> Erweiterte Einstellungen -> Verhalten --> Watchdog
Grundlagen der Kommunikation Abb. 16: Karteireiter EtherCAT -> Erweiterte Einstellungen -> Verhalten --> Watchdog Anmerkungen: • der Multiplier ist für beide Watchdogs gültig. • jeder Watchdog hat dann noch eine eigene Timereinstellung, die zusammen mit dem Multiplier eine resultierende Zeit ergibt. •... -
Seite 31: Ethercat State Machine
Grundlagen der Kommunikation EtherCAT-Master oder sehr lange Zykluszeiten anzupassen. Der Standardwert des SM-Watchdog ist auf 100 ms eingestellt. Der Einstellbereich umfasst 0..65535. Zusammen mit einem Multiplier in einem Bereich von 1..65535 deckt dies einen Watchdog-Zeitraum von 0..~170 Sekunden ab. Berechnung Multiplier = 2498 →... -
Seite 32: Ausgänge Im Safeop
Grundlagen der Kommunikation Init Nach dem Einschalten befindet sich der EtherCAT-Slave im Zustand Init. Dort ist weder Mailbox- noch Prozessdatenkommunikation möglich. Der EtherCAT-Master initialisiert die Sync-Manager-Kanäle 0 und 1 für die Mailbox-Kommunikation. Pre-Operational (Pre-Op) Beim Übergang von Init nach Pre-Op prüft der EtherCAT-Slave, ob die Mailbox korrekt initialisiert wurde. Im Zustand Pre-Op ist Mailbox-Kommunikation aber keine Prozessdaten-Kommunikation möglich. -
Seite 33: Verfügbarkeit
Grundlagen der Kommunikation CoE-Parameter sind in einer Tabellen-Hierarchie angeordnet und prinzipiell dem Anwender über den Feldbus lesbar zugänglich. Der EtherCAT-Master (TwinCAT System Manager) kann über EtherCAT auf die lokalen CoE-Verzeichnisse der Slaves zugreifen und je nach Eigenschaften lesend oder schreibend einwirken. -
Seite 34: Abb. 18 Karteireiter "Coe-Online
Grundlagen der Kommunikation Abb. 18: Karteireiter "CoE-Online" In der oberen Abbildung sind die im Gerät "EL2502" verfügbaren CoE-Objekte von 0x1000 bis 0x1600 zusehen, die Subindizes von 0x1018 sind aufgeklappt. Datenerhaltung und Funktion "NoCoeStorage" Einige, insbesondere die vorgesehenen Einstellungsparameter des Slaves sind veränderlich und beschreibbar. -
Seite 35: Datenerhaltung
Grundlagen der Kommunikation Datenerhaltung Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherwei- se ausfallsicher im Gerät (EEPROM) gespeichert. D. h. nach einem Neustart (Repower) sind die veränderten CoE-Parameter immer noch erhalten. Andere Hersteller können dies anders handhaben. -
Seite 36: Abb. 20 Offline-Verzeichnis
Grundlagen der Kommunikation Online/Offline Verzeichnis Während der Arbeit mit dem TwinCAT System Manager ist zu unterscheiden ob das EtherCAT-Gerät gerade "verfügbar", also angeschaltet und über EtherCAT verbunden und damit online ist oder ob ohne angeschlossene Slaves eine Konfiguration offline erstellt wird. In beiden Fällen ist ein CoE-Verzeichnis nach Abb. -
Seite 37: Abb. 21 Online-Verzeichnis
• Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255 • Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255 • Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255 • ... Allgemein wird dies geschrieben als 0x80n0. Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der Beckhoff Website. EL70x1 Version: 4.6... -
Seite 38: Distributed Clock
Grundlagen der Kommunikation Distributed Clock Die Distributed Clock stellt eine lokale Uhr im EtherCAT Slave Controller (ESC) dar mit den Eigenschaften: • Einheit 1 ns • Nullpunkt 1.1.2000 00:00 • Umfang 64 Bit (ausreichend für die nächsten 584 Jahre); manche EtherCAT-Slaves unterstützen jedoch nur einen Umfang von 32 Bit, d.h. -
Seite 39: Montage Und Verdrahtung
Montage und Verdrahtung Montage und Verdrahtung Tragschienenmontage WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Montage Abb. 22: Montage auf Tragschiene Die Buskoppler und Busklemmen werden durch leichten Druck auf handelsübliche 35 mm Tragschienen (Hutschienen nach EN 60715) aufgerastet: 1. -
Seite 40: Abb. 23 Demontage Von Tragschiene
Montage und Verdrahtung Demontage Abb. 23: Demontage von Tragschiene Jede Klemme wird durch eine Verriegelung auf der Tragschiene gesichert, die zur Demontage gelöst werden muss: 1. Ziehen Sie die Klemme an ihren orangefarbigen Laschen ca. 1 cm von der Tragschiene herunter. Da- bei wird die Tragschienenverriegelung dieser Klemme automatisch gelöst und Sie können die Klemme nun ohne großen Kraftaufwand aus dem Busklemmenblock herausziehen. -
Seite 41: Beschädigung Des Gerätes Möglich
Montage und Verdrahtung Abb. 24: Linksseitiger Powerkontakt HINWEIS Beschädigung des Gerätes möglich Beachten Sie, dass aus EMV-Gründen die PE-Kontakte kapazitiv mit der Tragschiene verbunden sind. Das kann bei der Isolationsprüfung zu falschen Ergebnissen und auch zur Beschädigung der Klemme führen (z. B. Durchschlag zur PE-Leitung bei der Isolationsprüfung eines Verbrauchers mit 230 V Nennspannung). Klemmen Sie zur Isolationsprüfung die PE- Zuleitung am Buskoppler bzw. -
Seite 42: Montagevorschriften Für Klemmen Mit Erhöhter Mechanischer Belastbarkeit
Montage und Verdrahtung Montagevorschriften für Klemmen mit erhöhter mechanischer Belastbarkeit WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Zusätzliche Prüfungen Die Klemmen sind folgenden zusätzlichen Prüfungen unterzogen worden: Prüfung... -
Seite 43: Anschluss
Montage und Verdrahtung Anschluss 4.3.1 Anschlusstechnik WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Übersicht Mit verschiedenen Anschlussoptionen bietet das Busklemmensystem eine optimale Anpassung an die Anwendung: •... -
Seite 44: Verdrahtung Hd-Klemmen
Montage und Verdrahtung Die gewohnten Maße der Klemme ändern sich durch den Stecker nur geringfügig. Der Stecker trägt ungefähr 3 mm auf; dabei bleibt die maximale Höhe der Klemme unverändert. Eine Lasche für die Zugentlastung des Kabels stellt in vielen Anwendungen eine deutliche Vereinfachung der Montage dar und verhindert ein Verheddern der einzelnen Anschlussdrähte bei gezogenem Stecker. -
Seite 45: Verdrahtung
Montage und Verdrahtung 4.3.2 Verdrahtung WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Klemmen für Standardverdrahtung ELxxxx/KLxxxx und für steckbare Verdrahtung ESxxxx/KSxxxx Abb. 28: Anschluss einer Leitung an eine Klemmstelle Bis zu acht Klemmstellen ermöglichen den Anschluss von massiven oder feindrähtigen Leitungen an die Busklemme. -
Seite 46: Schirmung
Montage und Verdrahtung Klemmengehäuse HD-Gehäuse Leitungsquerschnitt (massiv) 0,08 ... 1,5 mm Leitungsquerschnitt (feindrähtig) 0,25 ... 1,5 mm Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 0,75 mm Leitungsquerschnitt (ultraschall-litzenverdichtet) nur 1,5 mm Abisolierlänge 8 ... 9 mm 4.3.3 Schirmung Schirmung Encoder, analoge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitun- gen angeschlossen werden. -
Seite 47: Positionierung Von Passiven Klemmen
Montage und Verdrahtung Positionierung von passiven Klemmen Hinweis zur Positionierung von passiven Klemmen im Busklemmenblock EtherCAT-Klemmen (ELxxxx / ESxxxx), die nicht aktiv am Datenaustausch innerhalb des Busklem- menblocks teilnehmen, werden als passive Klemmen bezeichnet. Zu erkennen sind diese Klemmen an der nicht vorhandenen Stromaufnahme aus dem E-Bus. Um einen optimalen Datenaustausch zu gewährleisten, dürfen nicht mehr als 2 passive Klemmen direkt aneinander gereiht werden! Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt) Abb. 29: Korrekte Positionierung... -
Seite 48: Einbaulagen Bei Betrieb Mit Und Ohne Lüfter
Montage und Verdrahtung Einbaulagen bei Betrieb mit und ohne Lüfter HINWEIS Einschränkung von Einbaulage und Betriebstemperaturbereich Sorgen Sie bei der Montage der Klemmen dafür, dass im Betrieb oberhalb und unterhalb der Klemmen ausreichend Abstand zu anderen Komponenten eingehalten wird, so dass die Klemmen ausreichend belüf- tet werden! Vorgeschriebene Einbaulage bei Betrieb ohne Lüfter Für die vorgeschriebene Einbaulage wird die Tragschiene waagerecht montiert und die Anschlussflächen... -
Seite 49: Abb. 32 Empfohlene Abstände Bei Betrieb Mit Lüfter
Montage und Verdrahtung Abb. 32: Empfohlene Abstände bei Betrieb mit Lüfter Weitere Einbaulagen Durch die verstärkende Wirkung auf die Kühlung der Klemmen durch den Lüfter sind ggf. weitere Einbaulagen zulässig (siehe Abb. „Weitere Einbaulagen, Beispiel 1 und 2“); entnehmen Sie entsprechende Hinweise bitte den Technischen Daten der Klemme. -
Seite 50: Abb. 34 Weitere Einbaulagen, Beispiel 2
Montage und Verdrahtung Abb. 34: Weitere Einbaulagen, Beispiel 2 Version: 4.6 EL70x1... -
Seite 51: Ul Hinweise - Compact Motion
The modules are intended for use with Beckhoff’s UL Listed EtherCAT System only. Examination For cULus examination, the Beckhoff I/O System has only been investigated for risk of fire and electrical shock (in accordance with UL508 and CSA C22.2 No. 142). For devices with Ethernet connectors Not for connection to telecommunication circuits. -
Seite 52: Montage Und Verdrahtung
Montage und Verdrahtung EL7031 4.7.1 LEDs und Anschlussbelegung Abb. 35: LEDs EL7031 LEDs Farbe Bedeutung grün Diese LED gibt den Betriebszustand der Klemme wieder: Zustand der EtherCAT State Machine [} 31]: INIT = Initialisierung der Klemme oder BOOTSTRAP = Funktion für Firmware Updates [} 244] der Klemme blinkend Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kommunikation und ab- weichende Standard-Einstellungen gesetzt... -
Seite 53: Abb. 36 Anschlussbelegung El7031
Montage und Verdrahtung Abb. 36: Anschlussbelegung EL7031 Anschlussbelegung Klemmstelle Name Signal Motorwicklung A Motorwicklung B Motorversorgung +24 V Einspeisung für Endstufen (vom positivem Powerkontakt) Input 1 Digitaler Eingang 1 (24 V Motorwicklung A Motorwicklung B Motorversorgung 0 V Einspeisung für Endstufen (vom negativem Powerkontakt) Input 2 Digitaler Eingang 2 (24 V EL70x1... -
Seite 54: Allgemeine Anschlussbeispiele
Dokumentation zu Schrittmotoren von Beckhoff Diese beiden Beispiele zeigen den Anschluss der bipolaren Beckhoff-Motoren AS1010, AS1020 oder AS1030. Weitere Informationen zu Schrittmotoren von Beckhoff finden Sie in der zugehörigen Dokumentati- on, die auf unserer Internetseite http://www.beckhoff.de/unter Download zur Verfügung steht. Version: 4.6... -
Seite 55: Abb. 38 Biopolare Ansteuerung Eines Unipolaren Motors,Nur Eine Hälfte Jeder Wicklung Wird Angesteu
Montage und Verdrahtung Unipolare Motoren Abb. 38: Biopolare Ansteuerung eines unipolaren Motors, nur eine Hälfte jeder Wicklung wird angesteuert. EL70x1 Version: 4.6... -
Seite 56: El7041
Montage und Verdrahtung EL7041 4.8.1 LEDs und Anschlussbelegung 4.8.1.1 EL7041-0000 WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Abb. 39: EL7041-0000 LEDs LEDs (linkes Prisma) Farbe Bedeutung... - Seite 57 Montage und Verdrahtung Farbe Bedeutung Enable grün Motoransteuerung ist gesperrt (Index 0x6010:02 [} 205] ist nicht gesetzt) oder EL7041 ist nicht betriebsbereit) Motoransteuerung ist freigeschaltet (Index 0x6010:02 [} 205] ist gesetzt) und EL7041 ist betriebsbereit Warning gelb keine Mängel Konfigurationsfehler, z. B.: • Motorspannung nicht angelegt •...
-
Seite 58: Ground-Anschluss
Montage und Verdrahtung Klemmstel- Name Signal Encoder-Eingang C (Nulleingang) Der aktuelle Counter-Wert wird als Referenzmarke im Latch- Register gespeichert, wenn das Bit im Objekt 0x7000:01 [} 206] gesetzt ist und eine steigende Flanke am Encoder-Eingang C auftritt. Encoder-Versorgung Encoder-Versorgung (vom positivem Powerkontakt) +24 V Input 1 Digitaler Eingang 1 (24 V... - Seite 59 Montage und Verdrahtung 4.8.1.2 EL7041-0001 WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Abb. 41: EL7041-0001 LEDs LEDs (linkes Prisma) Farbe Bedeutung grün...
- Seite 60 Montage und Verdrahtung Farbe Bedeutung Warning gelb keine Mängel Konfigurationsfehler, z. B.: • Motorspannung nicht angelegt • 80°C Temperatur überschritten • 100% Duty cycle erreicht • ... Error A Konfigurationsfehler der Endstufe A, z. B.: • 100°C Temperatur überschritten • Kurzschluss • ... Error B Konfigurationsfehler der Endstufe B, z. B.: •...
- Seite 61 Montage und Verdrahtung Klemmstel- Name Signal Encoder-Versorgung Encoder-Versorgung (vom positivem Powerkontakt) +24 V Input 1 Digitaler Eingang 1 (24 V Encoder-Eingang B Latch / Gate Latch Eingang. Der aktuelle Counter-Wert wird als Referenzmarke im Latch-Register gespeichert, wenn • im Objekt 0x7000:02 [} 206] das Bit gesetzt ist und eine steigende Flanke am Latch-Eingang auftritt oder •...
- Seite 62 Montage und Verdrahtung 4.8.1.3 EL7041-1000 WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! Abb. 43: EL7041-1000 LEDs LEDs (linkes Prisma) Farbe Bedeutung grün...
- Seite 63 Montage und Verdrahtung Farbe Bedeutung Warning gelb keine Mängel Konfigurationsfehler, z. B.: • Motorspannung nicht angelegt • 80°C Temperatur überschritten • 100% Duty cycle erreicht • ... Error A Konfigurationsfehler der Endstufe A, z. B.: • 100°C Temperatur überschritten • Kurzschluss • ... Error B Konfigurationsfehler der Endstufe B, z. B.: •...
- Seite 64 Montage und Verdrahtung Klemmstelle Name Signal Input 1 Digitaler Eingang 1 (24 V Encoder-Eingang B Latch / Gate Latch Eingang. Der aktuelle Counter-Wert wird als Referenzmarke im Latch-Register gespeichert, wenn • im Objekt 0x7000:02 das Bit gesetzt ist und eine steigende Flanke am Latch-Eingang auftritt oder •...
-
Seite 65: Allgemeine Anschlussbeispiele
Montage und Verdrahtung 4.8.2 Allgemeine Anschlussbeispiele WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta- ge, Demontage oder Verdrahtung der Busklemmen beginnen! HINWEIS Motorstränge korrekt anschließen! Schließen Sie die Wicklungen eines Motorstranges nur an die Klemmpunkte des gleichen Ausgangstrei- bers der Schrittmotorklemme an, z. B. -
Seite 66: Dokumentation Zu Schrittmotoren Von Beckhoff
Dokumentation zu Schrittmotoren von Beckhoff Diese beiden Beispiele zeigen den Anschluss der bipolaren Beckhoff-Motoren AS1010, AS1020, AS1030, AS1050 oder AS1060. Weitere Informationen zu Schrittmotoren von Beckhoff finden Sie in der zugehörigen Dokumentation, die auf unserer Internetseite http://www.beckhoff.de/unter Download zur Verfügung steht. - Seite 67 Montage und Verdrahtung Encoder Anschluss eines Encoders (24 V) Abb. 47: Anschluss eines Encoders (24 V) Der Encoder wird über die Klemmstellen 3 (+24 V) und 7 (0 V) aus den Powerkontakten versorgt. EL70x1 Version: 4.6...
-
Seite 68: Inbetriebnahme
• "offline": der vorgesehene Aufbau wird durch Hinzufügen und entsprechendes Platzieren einzelner Komponenten erstellt. Diese können aus einem Verzeichnis ausgewählt und Konfiguriert werden. ◦ Die Vorgehensweise für den „offline“ – Betrieb ist unter http://infosys.beckhoff.de einsehbar: TwinCAT 2 → TwinCAT System Manager → EA - Konfiguration → Anfügen eines E/A-Gerätes •... - Seite 69 Inbetriebnahme Abb. 48: Bezug von der Anwender Seite (Inbetriebnahme) zur Installation Das anwenderseitige Einfügen bestimmter Komponenten (E/A – Gerät, Klemme, Box,..) erfolgt bei TwinCAT 2 und TwinCAT 3 auf die gleiche Weise. In den nachfolgenden Beschreibungen wird ausschließlich der „online“ Vorgang angewandt. Beispielkonfiguration (realer Aufbau) Ausgehend von der folgenden Beispielkonfiguration wird in den anschließenden Unterkapiteln das Vorgehen für TwinCAT 2 und TwinCAT 3 behandelt: •...
- Seite 70 Inbetriebnahme Abb. 49: Aufbau der Steuerung mit Embedded-PC, Eingabe (EL1004) und Ausgabe (EL2008) Anzumerken ist, dass sämtliche Kombinationen einer Konfiguration möglich sind; beispielsweise könnte die Klemme EL1004 ebenso auch nach dem Koppler angesteckt werden oder die Klemme EL2008 könnte zusätzlich rechts an dem CX2040 angesteckt sein – dann wäre der Koppler EK1100 überflüssig. Version: 4.6 EL70x1...
-
Seite 71: Twincat 2
Inbetriebnahme 5.1.1 TwinCAT 2 Startup TwinCAT 2 verwendet grundlegend zwei Benutzeroberflächen: den „TwinCAT System Manager“ zur Kommunikation mit den elektromechanischen Komponenten und „TwinCAT PLC Control“ für die Erstellung und Kompilierung einer Steuerung. Begonnen wird zunächst mit der Anwendung des „TwinCAT System Manager“. Nach erfolgreicher Installation des TwinCAT-Systems auf den Anwender PC der zur Entwicklung verwendet werden soll, zeigt der TwinCAT 2 (Systemmanager) folgende Benutzeroberfläche nach dem Start: Abb. 50: Initiale Benutzeroberfläche TwinCAT 2... - Seite 72 Inbetriebnahme Abb. 51: Wähle Zielsystem Mittels "Suchen (Ethernet)..." wird das Zielsystem eingetragen. Dadurch wird ein weiterer Dialog geöffnet um hier entweder: • den bekannten Rechnernamen hinter "Enter Host Name / IP:" einzutragen (wie rot gekennzeichnet) • einen "Broadcast Search" durchzuführen (falls der Rechnername nicht genau bekannt) •...
- Seite 73 Inbetriebnahme Geräte einfügen In dem linksseitigen Konfigurationsbaum der TwinCAT 2 – Benutzeroberfläche des System Managers wird „E/A Geräte“ selektiert und sodann entweder über Rechtsklick ein Kontextmenü geöffnet und „Geräte Suchen…“ ausgewählt oder in der Menüleiste mit die Aktion gestartet. Ggf. ist zuvor der TwinCAT System Manager in den „Konfig Modus“...
- Seite 74 Inbetriebnahme Abb. 55: Abbildung der Konfiguration im TwinCAT 2 Systemmanager Der gesamte Vorgang setzt sich aus zwei Stufen zusammen, die auch separat ausgeführt werden können (erst das Ermitteln der Geräte, dann das Ermitteln der daran befindlichen Elemente wie Boxen, Klemmen o.ä.). So kann auch durch Markierung von „Gerät ..“ aus dem Kontextmenü eine „Suche“ Funktion (Scan) ausgeführt werden, die hierbei dann lediglich die darunter liegenden (im Aufbau vorliegenden) Elemente einliest: Abb. 56: Einlesen von einzelnen an einem Gerät befindlichen Klemmen...
- Seite 75 Inbetriebnahme ◦ Strukturierter Text (ST) • Grafische Sprachen ◦ Funktionsplan (FUP, FBD) ◦ Kontaktplan (KOP, LD) ◦ Freigrafischer Funktionsplaneditor (CFC) ◦ Ablaufsprache (AS, SFC) Für die folgenden Betrachtungen wird lediglich vom strukturierten Text (ST) Gebrauch gemacht. Nach dem Start von TwinCAT PLC Control wird folgende Benutzeroberfläche für ein initiales Projekt dargestellt: Abb. 57: TwinCAT PLC Control nach dem Start Nun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt und unter dem...
- Seite 76 Inbetriebnahme Abb. 58: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung) Die Warnung 1990 (fehlende „VAR_CONFIG“) nach einem Kompiliervorgang zeigt auf, dass die als extern definierten Variablen (mit der Kennzeichnung „AT%I*“ bzw. „AT%Q*“) nicht zugeordnet sind. Das TwinCAT PLC Control erzeugt nach erfolgreichen Kompiliervorgang eine „*.tpy“ Datei in dem Verzeichnis in dem das Projekt gespeichert wurde.
- Seite 77 Inbetriebnahme Über ein dadurch geöffnetes Browserfenster wird die PLC- Konfiguration „PLC_example.tpy“ ausgewählt. Dann ist in dem Konfigurationsbaum des System Manager das Projekt inklusive der beiden „AT“ – gekennzeichneten Variablen eingebunden: Abb. 60: Eingebundenes PLC Projekt in der SPS- Konfiguration des System Managers Die beiden Variablen „bEL1004_Ch4“...
- Seite 78 Inbetriebnahme Abb. 62: Auswahl des PDO vom Typ BOOL Entsprechend der Standarteinstellungen stehen nur bestimmte PDO Objekte zur Auswahl zur Verfügung. In diesem Beispiel wird von der Klemme EL1004 der Eingang von Kanal 4 zur Verknüpfung ausgewählt. Im Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle Typen“...
- Seite 79 Inbetriebnahme Abb. 64: Anwendung von "Goto Link Variable" am Beispiel von "MAIN.bEL1004_Ch4" Anschließend wird mittels Menüauswahl „Aktionen“ → „Zuordnung erzeugen…“ oder über Vorgang des Zuordnens von Variablen zu PDO abgeschlossen. Dies lässt sich entsprechend in der Konfiguration einsehen: Der Vorgang zur Erstellung von Verknüpfungen kann auch in umgekehrter Richtung, d.h. von einzelnen PDO ausgehend zu einer Variablen erfolgen.
- Seite 80 Inbetriebnahme Abb. 65: Auswahl des Zielsystems (remote) In diesem Beispiel wird das „Laufzeitsystem 1 (Port 801)“ ausgewählt und bestätigt. Mittels Menüauswahl „Online“ → „Login“, Taste F11 oder per Klick auf wird auch die PLC mit dem Echtzeitsystem verbunden und nachfolgend das Steuerprogramm geladen, um es ausführen lassen zu können. Dies wird entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen werden?“...
-
Seite 81: Twincat 3
Inbetriebnahme Über „Online“ → „Run“, Taste F5 oder kann nun die PLC gestartet werden. 5.1.2 TwinCAT 3 Startup TwinCAT 3 stellt die Bereiche der Entwicklungsumgebung durch das Microsoft Visual-Studio gemeinsam zur Verfügung: in den allgemeinen Fensterbereich erscheint nach dem Start linksseitig der Projektmappen- Explorer (vgl. - Seite 82 Inbetriebnahme Abb. 68: Neues TwinCAT 3 Projekt erstellen Im Projektmappen-Explorer liegt sodann das neue Projekt vor: Abb. 69: Neues TwinCAT 3 Projekt im Projektmappen-Explorer Es besteht generell die Möglichkeit das TwinCAT "lokal" oder per "remote" zu verwenden. Ist das TwinCAT System inkl. Benutzeroberfläche (Standard) auf dem betreffenden PLC (lokal) installiert, kann TwinCAT "lokal"...
- Seite 83 Inbetriebnahme und folgendes Fenster hierzu geöffnet: Abb. 70: Auswahldialog: Wähle Zielsystem Mittels "Suchen (Ethernet)..." wird das Zielsystem eingetragen. Dadurch wird ein weiterer Dialog geöffnet um hier entweder: • den bekannten Rechnernamen hinter "Enter Host Name / IP:" einzutragen (wie rot gekennzeichnet) •...
- Seite 84 Inbetriebnahme Nach der Auswahl mit „OK“ ist das Zielsystem über das Visual Studio Shell ansprechbar. Geräte einfügen In dem linksseitigen Projektmappen-Explorer der Benutzeroberfläche des Visual Studio Shell wird innerhalb des Elementes „E/A“ befindliche „Geräte“ selektiert und sodann entweder über Rechtsklick ein Kontextmenü geöffnet und „Scan“...
- Seite 85 Inbetriebnahme Abb. 74: Abbildung der Konfiguration in VS Shell der TwinCAT 3 Umgebung Der gesamte Vorgang setzt sich aus zwei Stufen zusammen, die auch separat ausgeführt werden können (erst das Ermitteln der Geräte, dann das Ermitteln der daran befindlichen Elemente wie Boxen, Klemmen o.ä.).
- Seite 86 Inbetriebnahme PLC programmieren TwinCAT PLC Control ist die Entwicklungsumgebung zur Erstellung der Steuerung in unterschiedlichen Programmumgebungen: Das TwinCAT PLC Control unterstützt alle in der IEC 61131-3 beschriebenen Sprachen. Es gibt zwei textuelle Sprachen und drei grafische Sprachen. • Textuelle Sprachen ◦...
- Seite 87 Inbetriebnahme Abb. 77: Festlegen des Namens bzw. Verzeichnisses für die PLC Programmierumgebung Das durch Auswahl von „Standard PLC Projekt“ bereits existierende Programm „Main“ kann über das „PLC_example_Project“ in „POUs“ durch Doppelklick geöffnet werden. Es wird folgende Benutzeroberfläche für ein initiales Projekt dargestellt: Abb. 78: Initiales Programm "Main"...
- Seite 88 Inbetriebnahme Abb. 79: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung) Das Steuerprogramm wird nun als Projektmappe erstellt und damit der Kompiliervorgang vorgenommen: Abb. 80: Kompilierung des Programms starten Anschließend liegen in den „Zuordnungen“ des Projektmappen-Explorers die folgenden – im ST/ PLC Programm mit „AT%“...
- Seite 89 Inbetriebnahme Variablen Zuordnen Über das Menü einer Instanz – Variablen innerhalb des „SPS“ Kontextes wird mittels „Verknüpfung Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs) für dessen Verknüpfung geöffnet: Abb. 81: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten In dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die Variable „bEL1004_Ch4“...
- Seite 90 Inbetriebnahme Abb. 82: Auswahl des PDO vom Typ BOOL Entsprechend der Standarteinstellungen stehen nur bestimmte PDO Objekte zur Auswahl zur Verfügung. In diesem Beispiel wird von der Klemme EL1004 der Eingang von Kanal 4 zur Verknüpfung ausgewählt. Im Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle Typen“...
- Seite 91 Inbetriebnahme der Klemme mit einem Byte entsprechend Bit 0 für Kanal 1 bis Bit 7 für Kanal 8 von der PLC im Programm später anzusprechen. Ein spezielles Symbol ( ) an dem gelben bzw. roten Objekt der Variablen zeigt an, dass hierfür eine Verknüpfung existiert.
- Seite 92 Inbetriebnahme Starten der Steuerung Entweder über die Menüauswahl „PLC“ → „Einloggen“ oder per Klick auf ist die PLC mit dem Echtzeitsystem zu verbinden und nachfolgend das Steuerprogramm zu geladen, um es ausführen lassen zu können. Dies wird entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen werden?“...
-
Seite 93: Twincat Entwicklungsumgebung
In den folgenden Kapiteln wird dem Anwender die Inbetriebnahme der TwinCAT Entwicklungsumgebung auf einem PC System der Steuerung sowie die wichtigsten Funktionen einzelner Steuerungselemente erläutert. Bitte sehen Sie weitere Informationen zu TwinCAT 2 und TwinCAT 3 unter http://infosys.beckhoff.de/. 5.2.1 Installation TwinCAT Realtime Treiber Um einen Standard Ethernet Port einer IPC Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, ist... - Seite 94 Inbetriebnahme Abb. 86: Aufruf im Systemmanager (TwinCAT 2) Unter TwinCAT 3 ist dies über das Menü unter „TwinCAT“ erreichbar: Abb. 87: Aufruf in VS Shell (TwinCAT 3) Der folgende Dialog erscheint: Abb. 88: Übersicht Netzwerkschnittstellen Hier können nun Schnittstellen, die unter "Kompatible Geräte" aufgeführt sind, über den "Install" Button mit dem Treiber belegt werden.
- Seite 95 Inbetriebnahme Abb. 89: Eigenschaft von EtherCAT Gerät (TwinCAT 2): Klick auf „Kompatible Geräte…“ von „Adapter“ TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“ geöffnet werden: Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnen Netzwerkschnittstelle (Windows Start →...
- Seite 96 Inbetriebnahme Abb. 91: Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports Andere mögliche Einstellungen sind zu vermeiden: Version: 4.6 EL70x1...
- Seite 97 Inbetriebnahme Abb. 92: Fehlerhafte Treiber-Einstellungen des Ethernet Ports EL70x1 Version: 4.6...
- Seite 98 Inbetriebnahme IP-Adresse des verwendeten Ports IP Adresse/DHCP In den meisten Fällen wird ein Ethernet-Port, der als EtherCAT-Gerät konfiguriert wird, keine allge- meinen IP-Pakete transportieren. Deshalb und für den Fall, dass eine EL6601 oder entsprechende Geräte eingesetzt werden, ist es sinnvoll, über die Treiber-Einstellung "Internet Protocol TCP/IP" ei- ne feste IP-Adresse für diesen Port zu vergeben und DHCP zu deaktivieren.
-
Seite 99: Hinweise Esi-Gerätebeschreibung
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0010) beschreibt die Funktion des Gerätes. Die Revision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z.B. in der Dokumentation nicht anders angegeben. - Seite 100 Revision in die Konfiguration zulässt. Üblicherweise bringt eine neue/größere Revision auch neue Features mit. Wenn diese nicht genutzt werden sollen, kann ohne Bedenken mit der bisherigen Revision 1018 in der Konfiguration weitergearbeitet werden. Dies drückt auch die Beckhoff Kompatibili- tätsregel aus.
-
Seite 101: Onlinedescription Unter Twincat
Inbetriebnahme Der System Manager legt bei „online“ erfassten Gerätebeschreibungen in seinem ESI-Verzeichnis eine neue Datei "OnlineDescription0000...xml" an, die alle online ausgelesenen ESI-Beschreibungen enthält. Abb. 97: Vom Systemmanager angelegt OnlineDescription.xml Soll daraufhin ein Slave manuell in die Konfiguration eingefügt werden, sind „online“ erstellte Slaves durch ein vorangestelltes „>“... - Seite 102 Inbetriebnahme Abb. 99: Hinweisfenster fehlerhafte ESI-Datei (links: TwinCAT 2; rechts: TwinCAT 3) Ursachen dafür können sein • Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei → prüfen Sie die Ihnen vorliegenden Schemata • Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden → Es ist der Hersteller der Datei zu kontaktieren Version: 4.6 EL70x1...
-
Seite 103: Twincat Esi Updater
Inbetriebnahme 5.2.3 TwinCAT ESI Updater Ab TwinCAT 2.11 kann der Systemmanager bei Onlinezugang selbst nach aktuellen Beckhoff ESI-Dateien suchen: Abb. 100: Anwendung des ESI Updater (>=TwinCAT 2.11) Der Aufruf erfolgt unter: „Options“ → "Update EtherCAT Device Descriptions". Auswahl bei TwinCAT 3: Abb. 101: Anwendung des ESI Updater (TwinCAT 3) Der ESI Updater ist eine bequeme Möglichkeit, die von den EtherCAT Herstellern bereitgestellten ESIs... -
Seite 104: Offline Konfigurationserstellung
Inbetriebnahme • müssen die Geräte/Module über EtherCAT-Kabel bzw. im Klemmenstrang so verbunden sein wie sie später eingesetzt werden sollen. • müssen die Geräte/Module mit Energie versorgt werden und kommunikationsbereit sein. • muss TwinCAT auf dem Zielsystem im CONFIG-Modus sein. Der Online-Scan-Vorgang setzt sich zusammen aus: •... -
Seite 105: Auswahl Ethernet Port
Inbetriebnahme Abb. 104: Auswahl Ethernet Port Diese Abfrage kann beim Anlegen des EtherCAT-Gerätes automatisch erscheinen, oder die Zuordnung kann später im Eigenschaftendialog gesetzt/geändert werden; siehe Abb. „Eigenschaften EtherCAT Gerät (TwinCAT 2)“. Abb. 105: Eigenschaften EtherCAT Gerät (TwinCAT 2) TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“... - Seite 106 Inbetriebnahme Abb. 106: Anfügen von EtherCAT Geräten (links: TwinCAT 2; rechts: TwinCAT 3) Es öffnet sich der Dialog zur Auswahl des neuen Gerätes. Es werden nur Geräte angezeigt für die ESI- Dateien hinterlegt sind. Die Auswahl bietet auch nur Geräte an, die an dem vorher angeklickten Gerät anzufügen sind - dazu wird die an diesem Port mögliche Übertragungsphysik angezeigt (Abb.
-
Seite 107: Geräte-Auswahl Nach Revision, Kompatibilität
Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden, z. B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neues EtherCAT Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzte Produktionsstand im Auswahldialog angezeigt. Sollen alle im System als ESI-Beschreibungen vorliegenden Revisionen eines Gerätes angezeigt werden, ist die Checkbox "Show Hidden Devices"... - Seite 108 Abb. 110: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 109: Online Konfigurationserstellung
Inbetriebnahme 5.2.6 ONLINE Konfigurationserstellung Erkennen/Scan des Geräts EtherCAT Befindet sich das TwinCAT-System im CONFIG-Modus, kann online nach Geräten gesucht werden. Erkennbar ist dies durch ein Symbol unten rechts in der Informationsleiste: • bei TwinCAT 2 durch eine blaue Anzeige „Config Mode“ im System Manager-Fenster: •... -
Seite 110: Funktionsweise Online Scan
Inbetriebnahme Abb. 114: Hinweis automatischer GeräteScan (links: TwinCAT 2; rechts: TwinCAT 3) Ethernet Ports mit installierten TwinCAT Realtime-Treiber werden als "RT-Ethernet" Geräte angezeigt. Testweise wird an diesen Ports ein EtherCAT-Frame verschickt. Erkennt der Scan-Agent an der Antwort, dass ein EtherCAT-Slave angeschlossen ist, wird der Port allerdings gleich als "EtherCAT Device" angezeigt. -
Seite 111: Slave-Scan In Der Praxis Im Serienmaschinenbau
Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen mit Klemmen EL2521-0025-1018 angelegt. Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019. - Seite 112 Inbetriebnahme Dazu kommt, dass durch produktionsbegleitende Entwicklung in Firma A das neue Feature C der EL2521-0025-1019 (zum Beispiel ein verbesserter Analogfilter oder ein zusätzliches Prozessdatum zur Diagnose) gerne entdeckt und ohne betriebsinterne Rücksprache genutzt wird. Für die so entstandene neue Konfiguration "B2.tsm"...
- Seite 113 Inbetriebnahme Abb. 123: Anzeige des Wechsels zwischen „Free Run“ und „Config Mode“ unten rechts in der Statusleiste Abb. 124: TwinCAT kann auch durch einen Button in diesen Zustand versetzt werden (links: TwinCAT 2; rechts TwinCAT 3) Das EtherCAT System sollte sich danach in einem funktionsfähigen zyklischen Betrieb nach Abb. „Beispielhafte Online-Anzeige“...
-
Seite 114: Veränderung Der Konfiguration Nach Vergleich
Bei diesem Scan werden z.Z. (TwinCAT 2.11 bzw. 3.1) nur die Geräteeigenschaften Vendor (Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder "Copy" sollte nur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s.o.) nur mit Bedacht vorgenommen werden. Das Gerät wird dann in der Konfigura- tion gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten und... - Seite 115 Kommunikationsanfragen/-einstellungen des Masters unterstützen. Dies ist abwärtskompatibel der Fall, d.h. neuere Geräte (höhere Revision) sollen es auch unterstützen, wenn der EtherCAT Master sie als eine ältere Revision anspricht. Als Beckhoff-Kompatibilitätsregel für EtherCAT-Klemmen/ Boxen/ EJ-Module ist anzunehmen: Geräte-Revision in der Anlage >= Geräte-Revision in der Konfiguration Dies erlaubt auch den späteren Austausch von Geräten ohne Veränderung der Konfiguration (ab-...
- Seite 116 Abb. 129: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 117: Ethercat Teilnehmerkonfiguration
Inbetriebnahme Change to Alternative Type Der TwinCAT System Manager bietet eine Funktion zum Austauschen eines Gerätes: Change to Alternative Type Abb. 132: TwinCAT 2 Dialog Change to Alternative Type Wenn aufgerufen, sucht der System Manager in der bezogenen Geräte-ESI (hier im Beispiel: EL1202-0000) nach dort enthaltenen Angaben zu kompatiblen Geräten. - Seite 118 Inbetriebnahme Karteireiter „Allgemein“ Abb. 134: Karteireiter „Allgemein“ Name Name des EtherCAT-Geräts Laufende Nr. des EtherCAT-Geräts Typ des EtherCAT-Geräts Kommentar Hier können Sie einen Kommentar (z.B. zum Anlagenteil) hinzufügen. Disabled Hier können Sie das EtherCAT-Gerät deaktivieren. Symbole erzeugen Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf diesen EtherCAT-Slave zugreifen.
- Seite 119 Prozessdaten (Größe in Bit/Bytes, Quellort, Übertragungsart) er von oder zu diesem Slave übermitteln möchte. Eine falsche Konfiguration kann einen erfolgreichen Start des Slaves verhindern. Für Beckhoff EtherCAT Slaves EL, ES, EM, EJ und EP gilt im Allgemeinen: • Die vom Gerät unterstützten Prozessdaten Input/Output sind in der ESI/XML-Beschreibung herstellerseitig definiert.
-
Seite 120: Manuelle Veränderung Der Prozessdaten
Inbetriebnahme • Die Prozessdateninformationen liegen bei so genannten "intelligenten" EtherCAT-Geräten ebenfalls im CoE-Verzeichnis vor. Beliebige Veränderungen in diesem CoE-Verzeichnis, die zu abweichenden PDO-Einstellungen führen, verhindern jedoch das erfolgreiche Hochlaufen des Slaves. Es wird abgeraten, andere als die vorgesehene Prozessdaten zu konfigurieren, denn die Geräte-Firmware (wenn vorhanden) ist auf diese PDO-Kombinationen abgestimmt. - Seite 121 Inbetriebnahme Karteireiter „Startup“ Der Karteireiter Startup wird angezeigt, wenn der EtherCAT-Slave eine Mailbox hat und das Protokoll CANopen over EtherCAT (CoE) oder das Protokoll Servo drive over EtherCAT unterstützt. Mit Hilfe dieses Karteireiters können Sie betrachten, welche Download-Requests während des Startups zur Mailbox gesendet werden.
- Seite 122 Inbetriebnahme Abb. 139: Karteireiter „CoE – Online“ Darstellung der Objekt-Liste Spalte Beschreibung Index Index und Subindex des Objekts Name Name des Objekts Flags Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben werden (Read/Write) Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das Objekt zu schreiben (Read only) Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt.
- Seite 123 Inbetriebnahme Advanced Die Schaltfläche Advanced öffnet den Dialog Advanced Settings. Hier können Sie festlegen, welche Objekte in der Liste angezeigt werden. Abb. 140: Dialog „Advanced settings“ Online - über SDO- Wenn dieses Optionsfeld angewählt ist, wird die Liste der im Information Objektverzeichnis des Slaves enthaltenen Objekte über SDO-Information aus dem Slave hochgeladen.
- Seite 124 Inbetriebnahme Pre-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Pre- Operational zu setzen. Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Operational zu setzen. Bootstrap Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Bootstrap zu setzen. Safe-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Safe- Operational zu setzen.
-
Seite 125: Download-Revision In Der Start-Up Liste
Inbetriebnahme Detaillierte Informationen zu Distributed Clocks sind unter http://infosys.beckhoff.de angegeben: Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Distributed Clocks 5.2.7.1 Download-Revision Download-Revision in der Start-up Liste Einzelne Klemmen / Module generieren automatisch den Eintrag aus Objekt 0xF081:01 in die Star- tup-Liste (vgl. -
Seite 126: Aktivierung Der Pdo-Zuordnung
Inbetriebnahme Aktivierung der PDO-Zuordnung ü Wenn Sie die PDO-Zuordnung geändert haben, muss zur Aktivierung der neuen PDO-Zuord- nung a) der EtherCAT-Slave einmal den Statusübergang PS (von Pre-Operational zu Safe-Operational) durchlaufen (siehe Karteireiter Online [} 123]) b) der System-Manager die EtherCAT-Slaves neu laden (Schaltfläche bei TwinCAT 2 bzw. -
Seite 127: Allgemeine Inbetriebnahmehinweise Des Ethercat Slaves
Inbetriebnahme Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves In dieser Übersicht werden in Kurzform einige Aspekte des EtherCAT Slave Betriebs unter TwinCAT behandelt. Ausführliche Informationen dazu sind entsprechenden Fachkapiteln z.B. in der EtherCAT- Systemdokumentation zu entnehmen. Diagnose in Echtzeit: WorkingCounter, EtherCAT State und Status Im Allgemeinen bietet ein EtherCAT Slave mehrere Diagnoseinformationen zur Verarbeitung in der ansteuernden Task an. - Seite 128 Variablen über ADS sinnvoll. In Abb. „Grundlegende EtherCAT Slave Diagnose in der PLC“ ist eine Beispielimplementation einer grundlegenden EtherCAT Slave Diagnose zu sehen. Dabei wird eine Beckhoff EL3102 (2 kanalige analoge Eingangsklemme) verwendet, da sie sowohl über slave-typische Kommunikationsdiagnose als auch über kanal-spezifische Funktionsdiagnose verfügt.
-
Seite 129: Diagnoseinformationen
Inbetriebnahme Kennzeichen Funktion Ausprägung Anwendung/Auswertung Diagnoseinformationen des Ether- Zumindest der DevState ist in der CAT Master PLC zyklusaktuell auszuwerten. zyklisch aktualisiert (gelb) oder azy- Die Diagnoseinformationen des klisch bereitgestellt (grün). EtherCAT Master bieten noch weitaus mehr Möglichkeiten, die in der EtherCAT-Systemdokumentation behandelt werden. - Seite 130 Inbetriebnahme Abb. 146: EL3102, CoE-Verzeichnis EtherCAT-Systemdokumentation Es ist die ausführliche Beschreibung in der EtherCAT-Systemdokumentation (EtherCAT Grundlagen --> CoE Interface) zu beachten! Einige Hinweise daraus in Kürze: • Es ist geräteabhängig, ob Veränderungen im Online-Verzeichnis slave-lokal gespeichert werden. EL- Klemmen (außer den EL66xx) verfügen über diese Speichermöglichkeit. •...
- Seite 131 Inbetriebnahme Abb. 147: Beispiel Inbetriebnahmehilfe für eine EL3204 Diese Inbetriebnahme verwaltet zugleich • CoE-Parameterverzeichnis • DC/FreeRun-Modus • die verfügbaren Prozessdatensätze (PDO) Die dafür bisher nötigen Karteireiter "Process Data", "DC", "Startup" und "CoE-Online" werden zwar noch angezeigt, es wird aber empfohlen die automatisch generierten Einstellungen durch die Inbetriebnahmehilfe nicht zu verändern, wenn diese verwendet wird.
- Seite 132 Inbetriebnahme Der vom Anwender beabsichtigte, von TwinCAT beim Start automatisch herbeigeführte Ziel-State kann im System Manager eingestellt werden. Sobald TwinCAT in RUN versetzt wird, wird dann der TwinCAT EtherCAT Master die Zielzustände anfahren. Standardeinstellung Standardmäßig ist in den erweiterten Einstellungen des EtherCAT Masters gesetzt: •...
- Seite 133 Inbetriebnahme Abb. 149: Default Zielzustand im Slave Manuelle Führung Aus bestimmten Gründen kann es angebracht sein, aus der Anwendung/Task/PLc die States kontrolliert zu fahren, z.B. • aus Diagnosegründen • kontrolliertes Wiederanfahren von Achsen • ein zeitlich verändertes Startverhalten ist gewünscht Dann ist es in der PLC-Anwendung sinnvoll, die PLC-Funktionsblöcke aus der standardmäßig vorhandenen TcEtherCAT.lib zu nutzen und z.B.
- Seite 134 Inbetriebnahme Hinweis E-Bus-Strom EL/ES-Klemmen werden im Klemmenstrang auf der Hutschiene an einen Koppler gesetzt. Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, i.d.R. ist ein Koppler dabei bis zu 2 A belastbar. Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E- Bus-Versorgung benötigt, online und im Katalog verfügbar.
-
Seite 135: Einbindung In Die Nc-Konfiguration
Inbetriebnahme Einbindung in die NC-Konfiguration (Master: TwinCAT 2.11) EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. Die Einbindung an die NC kann wie folgt durchgeführt werden: •... - Seite 136 Inbetriebnahme Abb. 155: Achsentyp auswählen und bestätigen • Markieren Sie Ihre Achse mit der linken Maustaste. Unter der Registerkarte Einstellungen wählen Sie "Verknüpft mit..." aus (siehe Abb. Verknüpfung der Achse mit der Klemme). Abb. 156: Verknüpfung der Achse mit der Klemme • Wählen Sie die passende Klemme aus (Stepper Drive (MDP 703)) und bestätigen Sie mit "OK ". Abb. 157: Auswahl der richtigen Klemme •...
- Seite 137 Inbetriebnahme Abb. 158: Automatische Verknüpfung aller wichtigen Variablen • Damit der Motor in Betrieb genommen werden kann, müssen noch einige Parameter eingestellt werden. Die Werte entnehmen Sie dem Kapitel "Konfiguration der wichtigsten Parameter". Stellen Sie bitte diese Parameter ein, bevor Sie mit der Inbetriebnahme des Motors fortführen. Inbetriebnahme des Motors mit der NC •...
- Seite 138 Inbetriebnahme Eine andere Möglichkeit besteht darin, unter der Registerkarte Funktionen die Achse anzusteuern. Beispiel • Wählen Sie als Starttyp Reversing Sequence. • Geben Sie eine gewünschte Zielposition1 an, z. B. 5000°. • Geben Sie eine gewünschte Zielgeschwindigkeit an, z. B. 1200°/s. • Geben Sie eine gewünschte Zielposition2 an, z. B. 0°. •...
-
Seite 139: Konfiguration Der Wichtigsten Parameter
Inbetriebnahme Konfiguration der wichtigsten Parameter Die hier angegebenen Daten sind beispielhaft für einen Stepper Motor AS 1050-0120 aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren. Einstellungen im CoE-Register Anpassung von Strom und Spannung HINWEIS Überhitzung des Motors möglich! Um den angeschlossenen Motor nicht zu überhitzen, ist es wichtig den Strom und die Spannung, die vom Stepperinterface ausgegeben wird, dem Motor anzupassen. - Seite 140 Inbetriebnahme Abb. 162: Grundfrequenz einstellen Auswahl des Feedbacksystems (Nur beim Modul mit Encoderanschlüssen) Beim Feedbacksystem stehen 2 Möglichkeiten zur Auswahl: • Encoder: Externen Encoder zur Positionsrückführung nutzen • Internal Counter (default): Internen Zähler zur Positionsrückführung nutzen CoE "Feedback type" In der Grundeinstellung ist das Steppermodul auf den internen Zähler gesetzt. Wenn ein externer Encoder eingesetzt wird, muss die Einstellung mit einem Doppelklick auf den Index 0x8012:08 [} 200] "Feedback type"...
- Seite 141 Inbetriebnahme Abb. 163: Feedbacksystem auswählen KA-Faktor Mit dem K -Faktor kann der Strom in den Beschleunigungsphasen angepasst werden. Die Stromerhöhung wird wie folgt berechnet. Stromerhöhung in mA = Geschwindigkeitsdifferenz x K / 1000 Je steiler also die Geschwindigkeitsrampen sind, desto höher ist die Erhöhung des Stroms. EL70x1 Version: 4.6...
- Seite 142 Inbetriebnahme Abb. 164: Geschwindigkeitsrampen Dieser Wert lässt sich im Index 0x8011:07 "Ka factor (curr.)" einstellen (siehe Abb. K -Faktor einstellen). Abb. 165: KA-Faktor einstellen Einstellungen in der NC Auswahl der Bezugsgeschwindigkeit Die Maximalgeschwindigkeit errechnet sich anhand der Grundfrequenz und der Motorfrequenz. = Grundfrequenz / Motorfrequenz = (2000 Fullsteps / s) / (200 Fullsteps / Umdrehung) = 10 Umdrehungen / s Multipliziert man die Maximalgeschwindigkeit mit dem Weg pro Umdrehung, erhält man die Bezugsgeschwindigkeit.
- Seite 143 Inbetriebnahme = 10 Umdrehungen / s x 360° = 3600 °/ s Abb. 166: Parameter Bezugsgeschwindigkeit Totzeitkompensation Die Totzeitkompensation der Achse kann in der Registerkarte Time Compensation der Encodereinstellungen Achse1_ENC eingestellt werden. Sie sollte theoretisch 3 Zyklen der NC-Zykluszeit betragen, besser haben sich jedoch 4 Zyklen der NC-Zykluszeit erwiesen. Dazu sollten die Parameter Time Compensation Mode Encoder auf ‚ON (with velocity)‘...
- Seite 144 Inbetriebnahme Abb. 168: Skalierungsfaktor einstellen Berechnung des Skalierungsfaktors mit Encoder, 4-fach Auswertung: SF = Weg pro Umdrehung / (Inkremente x 4) = 360° / (1024 x 4) = 0,087890625 ° / INC ohne Encoder: SF = Weg pro Umdrehung / (Fullsteps x Microsteps) = 360° / (200 x 64) = 0,028125 ° / INC Schleppüberwachung Position Die Schleppabstandsüberwachung überwacht, ob der aktuelle Schleppabstand einer Achse einen Grenzwert überschreitet. Als Schleppabstand wird die Differenz zwischen ausgegebenem Sollwert (Stellgröße) und zurückgemeldetem Istwert bezeichnet.
- Seite 145 Inbetriebnahme Abb. 169: Schleppüberwachung einstellen -Faktoren In der NC lassen sich unter "Achse 1_Ctrl "in der Registerkarte "Parameter" zwei Proportionalfaktoren K einstellen. Wählen Sie jedoch vorher unter der Registerkarte "NC-Controller" den Typ Positionsregler mit zwei P-Konstanten (mit Ka) aus. Die beiden P-Konstanten sind einmal für den Bereich Stillstand und ein weiteres Mal für den Bereich Fahren (siehe Abb.
- Seite 146 Inbetriebnahme Totzone für Positionsfehler Mit Hilfe des Microstepping können 200 * 64 = 12800 Positionen angefahren werden. Da der Encoder nur 1024 * 4 = 4096 Positionen abfragen kann, wird unter Umständen eine Position, die sich zwischen 2 Abtastpunkten des Encoders befindet nicht richtig erfasst und die Klemme regelt um diese Position herum. Mit Hilfe der Totzone für Positionsfehler kann eine Toleranz angegeben werden, innerhalb der die Position als "erreicht"...
- Seite 147 Inbetriebnahme HINWEIS ACHTUNG: Pufferkondensatorklemme (EL9570) bei kurzen Bremsrampen verwenden! Bei sehr kurzen Bremsrampen kann es zu einer kurzzeitigen erhöhten Rückspeisung kommen. In diesem Fall meldet die Klemme einen Fehler. Um dies zu verhindern sollte eine Pufferkondensatorklemme (EL9570) mit entsprechend ausgelegtem Ballastwiderstand (z. B. 10 Ohm) parallel zur Spannungsversorgung (50 V) des Motors geschaltet werden.
-
Seite 148: Grundlagen Zum Positioning Interface
Inbetriebnahme Grundlagen zum Positioning Interface Das Positioning interface bietet dem Anwender eine Möglichkeit direkt auf der Klemme Fahraufträge auszuführen. 5.6.1 Predefined PDO Assignment Eine vereinfachte Auswahl der Prozessdaten ermöglicht das "Predefined PDO Assignment". Am unteren Teil des Prozessdatenreiters wählen Sie die Funktion "Positioning interface" oder "Positioning interface compact“ aus. -
Seite 149: "Speed Range" (Index 0X8012:05) [Gilt Für El70X1]
Inbetriebnahme POS Settings: Velocity min.: Die Klemme benötigt aus Gründen der Performance beim Herunterrampen auf die Zielposition einen Sicherheitsbereich von 0,5 %. Das bedeutet, dass abhängig von der erreichten Maximalgeschwindigkeit und der konfigurierten Verzögerung der Zeitpunkt errechnet wird, an dem die Bremsrampe beginnt. Um immer sicher ins Ziel zu gelangen, werden von der ermittelten Position 0,5% abgezogen. -
Seite 150: Informations- Und Diagnosedaten
Inbetriebnahme Modulo tolerance window: Toleranzfenster zur Ermittlung der Startbedingung der Modulo-Betriebsarten. POS Features: Start type: Der "Start type" bestimmt die Art der Berechnung für die Ermittlung der Zielposition (siehe unten). Time information: Durch diesen Parameter wird die Bedeutung der angezeigten "Actual drive time" konfiguriert. Zurzeit kann dieser Wert nicht verändert werden, da es keine weitere Auswahlmöglichkeit gibt. -
Seite 151: Zustände Der Internen Statemachine
Inbetriebnahme POS Diag data: Command rejected: Eine dynamische Änderung der Zielposition wird nicht zu jedem Zeitpunkt von der Klemme übernommen, da dies dann nicht möglich ist. Der neue Auftrag wird in diesem Fall abgewiesen und durch setzen dieses Bits signalisiert. Diese 3 Diagnose-Bits werden durch Setzten von "Warning"... -
Seite 152: Standard Ablauf Eines Fahrauftrags
Inbetriebnahme 5.6.5 Standard Ablauf eines Fahrauftrags Im folgenden Ablaufdiagramm ist ein "normaler" Ablauf eines Fahrauftrags dargestellt. Es wird grob zwischen diesen vier Stufen unterschieden: Startup Überprüfung des Systems und der Betriebsbereitschaft des Motors. Start positioning Schreiben aller Variablen und Berechnung der gewünschten Zielposition mit dem entsprechenden "Start type". -
Seite 153: Unterstützte Start Types Des Positioning Interfaces
Inbetriebnahme Unterstützte Start Types des Positioning Interfaces Name Kommando Gruppe Beschreibung ABSOLUTE 0x0001 Absolute Positionierung auf eine vorgegebene Zielposition Standard [} 153] RELATIVE 0x0002 Relative Positionierung auf eine berechnete Zielposition, ein vorge- gebener Positionsunterschied wird zur aktuelle Position addiert ENDLESS_PLUS 0x0003 Endlos fahren in positiver Drehrichtung (direkte Vorgabe einer Ge- schwindigkeit) ENDLESS_MINUS... - Seite 154 Inbetriebnahme Abb. 179: Relative Positionierung ENDLESS_PLUS / ENDLESS_MINUS Die beiden Starttypen ENDLESS_PLUS und ENDLESS_MINUS bieten im Positioning Interface die Möglichkeit dem Motor eine direkte Geschwindigkeit vorzugeben, um endlos in positiver oder negativer Richtung, mit den vorgegebenen Beschleunigungen, zu fahren. Abb. 180: Endlos fahren ADDITIVE Für die additive Positionierung wird, zur Berechnung der Zielposition B, das vom Anwender vorgegebene Positionsdelta S mit der beim letzten Fahrauftrag verwendeten Zielposition E addiert.
-
Seite 155: Zeitpunkt Der Änderung Der Zielposition
Inbetriebnahme HINWEIS Vorsicht bei der Verwendung der Positionierung RELATIVE_CHANGE Die Änderung per RELATIVE_CHANGE muss mit Vorsicht angewendet werden, da auch hier die aktuelle Position des Motors als Startposition verwendet wird. Durch Laufzeiten des Systems stimmt die im PDO angezeigte Position nie mit der realen Position des Motors überein! Daher wird sich bei der Berechnung des übergebenen Positionsdeltas immer eine Differenz zur gewünschten Zielposition einstellen. -
Seite 156: Modulo - Allgemeine Beschreibung
Inbetriebnahme Falls eine Kalibrierung per Hardware, aufgrund der applikatorischen Umstände, nicht möglich ist, kann der Anwender das Bit Calibrated auch manuell bzw automatisch setzen. Das manuelle Setzen bzw. Löschen erfolgt mit den Kommandos SET_CALIBRATION und CLEAR_CALIBRATION. Einfacher ist es aber, wenn man den Standard-Starttypen (Index 0x8021:01) auf SET_CALIBRATION_AUTO konfiguriert. - Seite 157 Inbetriebnahme Abb. 184: Wirkung des Modulo-Toleranzfensters - Modulo-Zielposition 0° in positiver Richtung Beispiel Eine Achse wird auf 0° positioniert, wodurch die Ist-Position der Achse anschließend exakt 0° beträgt. Ein weiterer Modulo-Fahrauftrag auf 360° in positiver Richtung führt zu einer vollen Umdrehung und die Modulo- Position der Achse ist anschließend wieder exakt 0°.
-
Seite 158: Positionierung Ohne Modulo-Toleranzfenster
Inbetriebnahme die Position weniger als 1° über 0° liegt, wird die Achse bei einem Modulo-Start in positiver Richtung zurückpositioniert. Bei einer Zielposition von 0° wird also in beiden Fällen eine Minimalbewegung auf exakt 0° ausgeführt und bei einer Zielposition von 360° wird in beiden Fällen eine ganze Umdrehung gefahren. Das Modulo-Toleranzfenster kann also innerhalb des Fensters zu Bewegungen gegen die beauftragte Richtung führen. - Seite 159 Inbetriebnahme nachfolgende Tabelle zeigt Positionierbeispiele für eine Ausgangsposition von ungefähr 90°. Das Modulo- Toleranzfenster ist hier auf 1° eingestellt. Besondere Fälle, in denen die Ausgangsposition außerhalb dieses Fensters liegt, sind gekennzeichnet. Die folgende Tabelle zeigt Beispiele zur Modulo-Positionierung bei ganzen Umdrehungen. Modulo-Starttyp Absolute Modulo-...
-
Seite 160: Beispiele Von Zwei Fahraufträgen Mit Dynamischer Änderung Der Zielposition
Inbetriebnahme 5.6.8 Beispiele von zwei Fahraufträgen mit dynamischer Änderung der Zielposition Ohne Überfahren der Zielposition Zeitpunkt POS Outputs POS Inputs Beschreibung Execute = 1 Busy = 1 • Vorgabe der ersten Parameter Target position = 200000 Accelerate = 1 • Beginn der Beschleunigungsphase Velocity = 2000 Start type = 0x0001 Acceleration = 1000... - Seite 161 Inbetriebnahme Mit Überfahren der Zielposition Zeitpunkt POS Outputs POS Inputs Beschreibung Execute = 1 Busy = 1 • Vorgabe der 1. Parameter Target position = 200000 Accelerate = 1 • Beginn der 1. Beschleunigungsphase Velocity = 5000 Start type = 0x0001 Acceleration = 3000 Deceleration = 5000 Accelerate = 0 •...
-
Seite 162: Prozessdaten
Inbetriebnahme Prozessdaten 5.7.1 Sync Manager (SM) Der Umfang der angebotenen Prozessdaten kann über den Reiter „Prozessdaten“ verändert werden (siehe Abb. Karteireiter Prozessdaten SM2, EL70xx (default)). Abb. 187: Karteireiter Prozessdaten SM2, EL70xx (default) Version: 4.6 EL70x1... -
Seite 163: Pdo-Zuordnung
Inbetriebnahme Abb. 188: Karteireiter Prozessdaten SM3, EL70xx (default) 5.7.2 PDO-Zuordnung Zur Konfiguration der Prozessdaten markieren Sie im oberen linken Feld „Sync Manager“ (siehe Abb. Karteireiter Prozessdaten SM2, EL70xx (default) und SM3, EL70xx (default)) den gewünschten Sync Manager (editierbar sind hier SM 2 + 3). Im Feld darunter „PDO Zuordnung“ können dann die diesem Sync Manager zugeordneten Prozessdaten an- oder abschaltet werden. - Seite 164 Inbetriebnahme SM2, PDO-Zuordnung 0x1C12 Index Index ausgeschlosse- Größe Name PDO Inhalt ner PDOs (Byte.Bit) 0x1600 0x1601 ENC Control Index 0x7000:01 [} 206] - Enable Latch C (default) compact Index 0x7000:02 [} 206] - Enable Latch extern on positive edge Index 0x7000:03 [} 206] - Set counter Index 0x7000:04 [} 206] - Enable Latch extern on negative edge Index 0x7000:11 [} 206] - Set counter value (16-bit) 0x1601...
- Seite 165 Inbetriebnahme SM3, PDO-Zuordnung 0x1C13 Index Index ausgeschlosse- Größe Name PDO Inhalt ner PDOs (Byte.Bit) 0x1A00 0x1A01 ENC Status Index 0x6000:01 [} 205] - Latch C valid (default) compact Index 0x6000:02 [} 205] - Latch extern valid Index 0x6000:03 [} 205] - Set counter done Index 0x6000:04 [} 205] - Counter underflow Index 0x6000:05 [} 205] - Counter overflow Index 0x6000:08 [} 205] - Extrapolation stall...
-
Seite 166: Predefined Pdo Assignment
Inbetriebnahme SM3, PDO-Zuordnung 0x1C13 Index Index ausgeschlosse- Größe Name PDO Inhalt ner PDOs (Byte.Bit) 0X1A08 STM External Index 0x6010:15 [} 205] - External position position Tab. 1: PDO-Zuordnung der Sync Manager, EL7041 5.7.3 Predefined PDO Assignment Eine vereinfachte Auswahl der Prozessdaten ermöglicht das "Predefined PDO Assignment". Am unteren Teil des Prozessdatenreiters wählen Sie die gewünschte Funktion aus. - Seite 167 Inbetriebnahme Abb. 189: Karteireiter Prozessdaten Predefined PDO Assignment, EL70xx EL70x1 Version: 4.6...
-
Seite 168: Anwendungsbeispiel
Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. Motoransteuerung mit Visualisierung Beispielprogramm (https://infosys.beckhoff.com/content/1031/el70x1/Resources/zip/3696560907.zip) Verwendeter Master: TwinCAT 2.11 (bei älteren Versionen muss der Regelkreis manuell programmiert werden, der in diesem Fall bereits in der NC implementiert ist). - Seite 169 Inbetriebnahme Abb. 191: Auswahl der MAC-Adresse • Bei der SPS-Konfiguration muss der Pfad des SPS-Programms angepasst werden. Klicken Sie dazu auf das angefügte SPS-Programm und wählen Sie die Registerkarte IEC1131 aus (siehe Abb. Ändern des SPS-Pfades). Dort müssen Sie Ändern anwählen und den richtigen Pfad bestimmen. Abb. 192: Ändern des SPS-Pfades •...
- Seite 170 Inbetriebnahme Abb. 193: Erforderliche Bibliotheken Anschließend werden einige globale Variablen deklariert (siehe Abb. Globale Variablen). Die Datentypen PLCTONC_AXLESTRUCT und NCTOPLC_AXLESTRUCT sorgen für die Kommunikation zwischen der PLC und der NC. Abb. 194: Globale Variablen Nachdem die globalen Variablen deklariert worden sind, können Sie mit der Programmierung starten. Dazu deklarieren Sie vorerst die lokalen Variablen (siehe Abb.
- Seite 171 Inbetriebnahme Abb. 196: Programmcode Mit Hilfe der folgenden Visualisierung (siehe Abb. Visualisierung) kann der Motor anschließend betrieben werden. Bitte betätigen Sie den Taster Enable, um die Freigaben für die Achse zu setzen. Sie können jetzt im "Free run mode" den Taster Left oder Right betätigen und der Motor dreht sich mit einer im fbMoveVelocity_Axis_1 definierten Geschwindigkeit, in die ausgewählte Richtung, oder Sie können im "Absolute mode"...
-
Seite 172: Informationen Zu Funktionsbausteinen Und Datentypen
Inbetriebnahme Abb. 197: Visualisierung Informationen zu Funktionsbausteinen und Datentypen Weitere Informationen zu den verwendeten Funktionsbausteinen und Datentypen erhalten Sie im aktuellen Beckhoff Information System. Version: 4.6 EL70x1... -
Seite 173: El7031 - Objektbeschreibung Und Parametrierung
Inbetriebnahme EL7031 - Objektbeschreibung und Parametrierung EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. Parametrierung über das CoE-Verzeichnis (CAN over EtherCAT) Die Parametrierung der Klemme wird über den CoE - Online Reiter (mit Doppelklick auf das ent- sprechende Objekt) bzw. - Seite 174 Inbetriebnahme Index 8010 STM Motor Settings Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8010:0 STM Motor Settings Maximaler Subindex UINT8 0x11 (17 Ch.1 8010:01 Maximal current Maximaler, dauerhafter Spulenstrom des Motors (Einheit: UINT16 0x05DC 1 mA) (1500 8010:02 Reduced current Reduzierter Spulenstrom (reduziertes Drehmoment, Ein- UINT16 0x01F4...
- Seite 175 Inbetriebnahme Index 8012 STM Features Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8012:0 STM Features Ch.1 Maximaler Subindex UINT8 0x49 (73 8012:01 Operation mode Betriebsart Automatik BIT4 0x00 (0 direkte Geschwindigkeit Geschwindigkeitsregler Positionsregler 8012:05 Speed range Vorwahl des Ge- 1000 Vollschritte/Sekunde BIT3 0x01 (1...
- Seite 176 Inbetriebnahme Index 8012 STM Features Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8012:19 Select info data 2 Auswahl "Info data Statuswort UINT8 0x04(4 2" Motorspannung Spule A (Einheit 1 mV) Motorspannung Spule B (Einheit 1 mV) Motorstrom Spule A (Einheit 1 mA) Motorstrom Spule B (Einheit 1 mA) Duty-Cycle Spule A...
- Seite 177 Inbetriebnahme Index 8020 POS Settings Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8020:0 POS Settings Ch.1 Maximaler Subindex UINT8 0x10 (16 8020:01 Velocity min. minimale Sollgeschwindigkeit (Bereich: 0-10000) INT16 0x0064 (100 8020:02 Velocity max. maximale Sollgeschwindigkeit (Bereich: 0-10000) INT16 0x2710 (10000 8020:03...
-
Seite 178: Kommando-Objekt
Inbetriebnahme Index 8021 POS Features Ch.1 Index Name Bedeutung Datentyp Flags Default 8021:0 POS Features Ch.1 Maximaler Subindex UINT8 0x16 (22 8021:01 Start type erlaubte Werte: UINT16 0x0001 (1 0: Idle 1: Absolute 2: Relative 3: Endless plus 4: Endless minus 6: Additive 24832: Calibration (Hardware sync) 24576: Calibration (Plc cam) -
Seite 179: Eingangsdaten
Inbetriebnahme 5.9.4 Eingangsdaten Index 6000 ENC Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 6000:0 ENC Inputs Ch.1 Maximaler Subindex UINT8 0x16 (22 6000:02 Latch extern valid Der Zählerstand wurde über das externe Latch gespei- BOOLEAN 0x00 (0 chert. 6000:03 Set counter done Der Zähler wurde gesetzt. -
Seite 180: Ausgangsdaten
Inbetriebnahme Index 6010 STM Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 6010:0 STM Inputs Ch.1 Maximaler Subindex UINT8 0x12 (18 6010:01 Ready to enable Treiberstufe ist bereit zum Freischalten BOOLEAN 0x00 (0 6010:02 Ready Treiberstufe ist betriebsbereit BOOLEAN 0x00 (0 6010:03 Warning... - Seite 181 Inbetriebnahme Index 7020 POS Outputs Ch.1 EL70x1 Version: 4.6...
- Seite 182 Inbetriebnahme Index (hex) Name Bedeutung Datentyp Flags Default 7020:0 POS Outputs Ch.1 Maximaler Subindex UINT8 0x24 (36 7020:01 Execute Fahrauftrag starten (steigende Flanke), bzw. Fahrauftrag BOOLEAN 0x00 (0 vorzeitig abbrechen (fallende Flanke) 7020:02 Emergency stop Fahrauftrag vorzeitig mit einer Notfallrampe abbrechen BOOLEAN 0x00 (0 (steigende Flanke)
- Seite 183 Inbetriebnahme Index (hex) Name Bedeutung Datentyp Flags Default 0x6E01 Calibration, set Kalibrierung auto- manual auto matisch setzen 0x6F00 Calibration, cle- Kalibrierung ma- ar manual nuell löschen 7020:23 Acceleration Vorgabe der Beschleunigung UINT16 0x0000 (0 7020:24 Deceleration Vorgabe der Verzögerung UINT16 0x0000 (0 Index 7021 POS Outputs 2 Ch.1 (Teil 1) Index...
-
Seite 184: Informations-/Diagnosedaten (Kanalspezifisch)
Inbetriebnahme 5.9.6 Informations-/Diagnosedaten (kanalspezifisch) Index 9010 STM Info data Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 9010:0 STM Info data Ch.1 Maximaler Subindex UINT8 0x08 (8 9010:01 Status word UINT16 0x0000 (0 Statuswort (siehe Index 0xA010 [} 184]) 9010:02 Motor coil voltage A Motorspannung Spule A (Einheit 1 mV) UINT16 0x0000 (0... - Seite 185 Inbetriebnahme Index 9020 POS Info data Ch.1 Index Name Bedeutung Datentyp Flags Default 9020:0 POS Info data Ch.1 Maximaler Subindex UINT8 0x04 (4 9020:01 Status word Statuswort UINT16 0x0000 (0 9020:03 State (drive controller) erlaubte Werte: UINT16 0x0000 (0 0: Init 1: Idle 272: Go cam 273: On cam...
-
Seite 186: Hersteller-Konfigurationsdaten (Gerätespezifisch)
Inbetriebnahme 5.9.7 Hersteller-Konfigurationsdaten (gerätespezifisch) Index F80F STM Vendor data Index (hex) Name Bedeutung Datentyp Flags Default F80F:0 STM Vendor data Maximaler Subindex UINT8 0x08 (8 F80F:01 PWM Frequency Zwischenkreisfrequenz (Einheit: 1 Hz) UINT16 0x7530 (30000 F80F:02 Deadtime Totzeit der Pulsweitenmodulation UINT16 0x0505 (1285 F80F:03... -
Seite 187: Standardobjekte
Inbetriebnahme 5.9.9 Standardobjekte Index 1000 Device type Index (hex) Name Bedeutung Datentyp Flags Default 1000:0 Device type Geräte-Typ des EtherCAT-Slaves: Das Lo-Word enthält UINT32 0x00001389 das verwendete CoE Profil (5001). Das Hi-Word enthält (5001 das Modul Profil entsprechend des Modular Device Profi- Index 1008 Device name Index (hex) Name Bedeutung... - Seite 188 Inbetriebnahme Index 1403 STM RxPDO-Par Position Index (hex) Name Bedeutung Datentyp Flags Default 1403:0 STM RxPDO-Par Po- PDO Parameter RxPDO 4 UINT8 0x06 (6 sition 1403:06 Exclude RxPDOs Hier sind die RxPDOs (Index der RxPDO Mapping Ob- OCTET- 04 16 05 16 jekte) angegeben, die nicht zusammen mit RxPDO 4 STRING[6] 06 16...
- Seite 189 Inbetriebnahme Index 1603 STM RxPDO-Map Position Index (hex) Name Bedeutung Datentyp Flags Default 1603:0 STM RxPDO-Map Po- PDO Mapping RxPDO 4 UINT8 0x01 (1 sition 1603:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (STM Outputs UINT32 0x7010:11, 32 Ch.1), entry 0x11 (Position)) Index 1604 STM RxPDO-Map Velocity Index (hex) Name Bedeutung...
- Seite 190 Inbetriebnahme Index 1C32 SM output parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C32:0 SM output parameter Synchronisierungsparameter der Outputs UINT8 0x20 (32 1C32:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0001 (1 • 0: Free Run • 1: Synchron with SM 2 Event •...
- Seite 191 Inbetriebnahme Index 1C33 SM input parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C33:0 SM input parameter Synchronisierungsparameter der Inputs UINT8 0x20 (32 1C33:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0022 (34 • 0: Free Run • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
- Seite 192 Inbetriebnahme Index F010 Module list Index (hex) Name Bedeutung Datentyp Flags Default F010:0 Module list Maximaler Subindex UINT8 0x03 (3 F010:01 SubIndex 001 Profilnummer Encoder Profile UINT32 0x000001FF (511 F010:02 SubIndex 002 Profilnummer Stepper Motor Profile UINT32 0x000002BF (703 F010:03 SubIndex 003 Profilnummer Positioning Interface Profile UINT32...
- Seite 193 Inbetriebnahme Index 1606 POS RxPDO-Map Control Index Name Bedeutung Datentyp Flags Default 1606:0 POS RxPDO-Map Max. Subindex UINT8 0x09 (9 Control 1606:01 SubIndex 001 1. PDO Mapping entry (object 0x7020 (POS Outputs UINT32 0x7020:01, 1 Ch.1), entry 0x01 (Execute)) 1606:02 SubIndex 002 2.
- Seite 194 Inbetriebnahme Index 1A00 ENC TxPDO-Map Status compact Index (hex) Name Bedeutung Datentyp Flags Default 1A00:0 ENC TxPDO-Map Max. Subindex UINT8 0x0D (13 Status compact 1A00:01 SubIndex 001 1. PDO Mapping entry (1 bits align) UINT32 0x0000:00, 1 1A00:02 SubIndex 002 2.
- Seite 195 Inbetriebnahme Index 1A03 STM TxPDO-Map Status Index (hex) Name Bedeutung Datentyp Flags Default 1A03:0 STM TxPDO-Map Max. Subindex UINT8 0x0E (14 Status 1A03:01 SubIndex 001 1. PDO Mapping entry (object 0x6010 (STM Inputs UINT32 0x6010:01, 1 Ch.1), entry 0x01 (Ready to enable)) 1A03:02 SubIndex 002 2.
- Seite 196 Inbetriebnahme Index 1A06 POS TxPDO-Map Status Index Name Bedeutung Datentyp Flags Default 1A06:0 POS TxPDO-Map Max. Subindex UINT8 0x0C (12 Status 1A06:01 SubIndex 001 1. PDO Mapping entry (object 0x6020 (POS Inputs UINT32 0x6020:01, 1 Ch.1), entry 0x01 (Busy)) 1A06:02 SubIndex 002 2.
- Seite 197 Inbetriebnahme Index 1C13 TxPDO assign Index (hex) Name Bedeutung Datentyp Flags Default 1C13:0 TxPDO assign PDO Assign Inputs UINT8 0x02 (2 1C13:01 Subindex 001 1. zugeordnete TxPDO (enthält den Index des zugehöri- UINT16 0x1A00 gen TxPDO Mapping Objekts) (6656 1C13:02 Subindex 002 2.
-
Seite 198: El7041 - Objektbeschreibung Und Parametrierung
Inbetriebnahme 5.10 EL7041 - Objektbeschreibung und Parametrierung EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff-Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. Parametrierung über das CoE-Verzeichnis (CAN over EtherCAT) Die Parametrierung des EtherCAT Gerätes wird über den CoE-Online Reiter [} 121] (mit Doppelklick auf das entsprechende Objekt) bzw. - Seite 199 Inbetriebnahme Index 8010 STM Motor Settings Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8010:0 STM Motor Settings Maximaler Subindex UINT8 0x11 (17 Ch.1 8010:01 Maximal current maximaler, dauerhafter Spulenstrom des Motors (Einheit: UINT16 0x1388 1 mA) (5000 8010:02 Reduced current reduzierter Spulenstrom (reduziertes Drehmoment, Ein- UINT16 0x09C4...
- Seite 200 Inbetriebnahme Index (hex) Name Bedeutung Datentyp Flags Default 8012:0 STM Features Ch.1 Maximaler Subindex UINT8 0x49 (73 8012:01 Operation mode Betriebsart Automatik BIT4 0x00 (0 direkte Geschwindigkeit Geschwindigkeitsregler Positionsregler 8012:05 Speed range Vorwahl des Ge- 1000 Vollschritte/Sekunde BIT3 0x01 (1 schwindigkeits-be- 2000 Vollschritte/Sekunde reichs...
- Seite 201 Inbetriebnahme Index 8012 STM Features Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8012:19 Select info data 2 Auswahl "Info data Statuswort UINT8 0x04(4 2" Motorspannung Spule A (Einheit 1 mV) Motorspannung Spule B (Einheit 1 mV) Motorstrom Spule A (Einheit 1 mA) Motorstrom Spule B (Einheit 1 mA) Duty-Cycle Spule A...
- Seite 202 Inbetriebnahme Index 8011 STM Controller Settings Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8011:0 STM Controller Set- Maximaler Subindex UINT8 0x08 (8 tings Ch.1 8011:01 Kp factor (curr.) Kp-Regelfaktor (Proportional-Anteil) für den Stromregler UINT16 0x0190 (Einheit: 0,001) (400 8011:02 Ki factor (curr.) Ki-Regelfaktor (Integral-Anteil) für den Stromregler (Ein- UINT16...
- Seite 203 Inbetriebnahme Index 8020 POS Settings Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8020:0 POS Settings Ch.1 Maximaler Subindex UINT8 0x10 (16 8020:01 Velocity min. minimale Sollgeschwindigkeit (Bereich: 0-10000) INT16 0x0064 (100 8020:02 Velocity max. maximale Sollgeschwindigkeit (Bereich: 0-10000) INT16 0x2710 (10000 8020:03...
-
Seite 204: Kommando-Objekt
Inbetriebnahme Index 8021 POS Features Ch.1 Index Name Bedeutung Datentyp Flags Default 8021:0 POS Features Ch.1 Maximaler Subindex UINT8 0x16 (22 8021:01 Start type erlaubte Werte: UINT16 0x0001 (1 0: Idle 1: Absolute 2: Relative 3: Endless plus 4: Endless minus 6: Additive 24832: Calibration (Hardware sync) 24576: Calibration (Plc cam) -
Seite 205: Eingangsdaten
Inbetriebnahme 5.10.4 Eingangsdaten Index 6000 ENC Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 6000:0 ENC Inputs Ch.1 Maximaler Subindex UINT8 0x16 (22 6000:01 Latch C valid Der Zählerstand wurde mit der C-Spur gelatched. BOOLEAN 0x00 (0 6000:02 Latch extern valid Der Zählerstand wurde über das externe Latch gespei- BOOLEAN 0x00 (0... -
Seite 206: Ausgangsdaten
Inbetriebnahme Index 6020 POS Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 6020:0 POS Inputs Ch.1 Maximaler Subindex UINT8 0x22 (34 6020:01 Busy ein aktueller Fahrauftrag ist aktiv BOOLEAN 0x00 (0 6020:02 In-Target Motor ist im Ziel angekommen BOOLEAN 0x00 (0 6020:03 Warning... - Seite 207 Inbetriebnahme Index 7020 POS Outputs Ch.1 EL70x1 Version: 4.6...
- Seite 208 Inbetriebnahme Index (hex) Name Bedeutung Datentyp Flags Default 7020:0 POS Outputs Ch.1 Maximaler Subindex UINT8 0x24 (36 7020:01 Execute Fahrauftrag starten (steigende Flanke), bzw. Fahrauftrag BOOLEAN 0x00 (0 vorzeitig abbrechen (fallende Flanke) 7020:02 Emergency stop Fahrauftrag vorzeitig mit einer Notfallrampe abbrechen BOOLEAN 0x00 (0 (steigende Flanke)
-
Seite 209: Informations-/Diagnosedaten (Kanalspezifisch)
Inbetriebnahme Index (hex) Name Bedeutung Datentyp Flags Default 0x6E01 Calibration, set Kalibrierung auto- manual auto matisch setzen 0x6F00 Calibration, cle- Kalibrierung ma- ar manual nuell löschen 7020:23 Acceleration Vorgabe der Beschleunigung UINT16 0x0000 (0 7020:24 Deceleration Vorgabe der Verzögerung UINT16 0x0000 (0 5.10.6 Informations-/Diagnosedaten (kanalspezifisch) -
Seite 210: Hersteller-Konfigurationsdaten (Gerätespezifisch)
Inbetriebnahme Index A010 STM Diag data Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default A010:0 STM Diag data Ch.1 Maximaler Subindex UINT8 0x11 (17 A010:01 Saturated Treiberstufe arbeitet mit maximalem Duty-Cycle BOOLEAN 0x00 (0 A010:02 Over temperature Innentemperatur der Klemme ist größer als 80°C (siehe BOOLEAN 0x00 (0 Subindex 0xF80F:04 [} 210]) -
Seite 211: Informations-/Diagnosedaten (Gerätespezifisch)
Inbetriebnahme 5.10.8 Informations-/Diagnosedaten (gerätespezifisch) Index F900 STM Info data Index (hex) Name Bedeutung Datentyp Flags Default F900:0 STM Info data Maximaler Subindex UINT8 0x06 (6 F900:01 Software version (dri- Softwareversion der Treiberkarte STRING ver) F900:02 Internal temperature interne Klemmentemperatur (Einheit: 1°C) INT8 0x00 (0 F900:04... - Seite 212 Inbetriebnahme Index 1601 ENC RxPDO-Map Control Index (hex) Name Bedeutung Datentyp Flags Default 1601:0 ENC RxPDO-Map PDO Mapping RxPDO 2 UINT8 0x07 (7 Control 1601:01 SubIndex 001 1. PDO Mapping entry (object 0x7000 (ENC Outputs UINT32 0x7000:01, 1 Ch.1), entry 0x01 (Enable latch C)) 1601:02 SubIndex 002 2.
- Seite 213 Inbetriebnahme Index 1A00 ENC TxPDO-Map Status compact Index (hex) Name Bedeutung Datentyp Flags Default 1A00:0 ENC TxPDO-Map PDO Mapping TxPDO 1 UINT8 0x11 (17 Status compact 1A00:01 SubIndex 001 1. PDO Mapping entry (1 bits align) UINT32 0x6000:01, 1 1A00:02 SubIndex 002 2.
- Seite 214 Inbetriebnahme Index 1A01 ENC TxPDO-Map Status Index (hex) Name Bedeutung Datentyp Flags Default 1A01:0 ENC TxPDO-Map PDO Mapping TxPDO 2 UINT8 0x11 (17 Status 1A01:01 SubIndex 001 1. PDO Mapping entry (1 bits align) UINT32 0x6000:01, 1 1A01:02 SubIndex 002 2. PDO Mapping entry (object 0x6000 (ENC Inputs UINT32 0x6000:02, 1 Ch.1), entry 0x02 (Latch extern valid))
- Seite 215 Inbetriebnahme nicht bei EL7041-0001 nur bei EL7041-0001 und EP7041 Index 1000 Device type Index (hex) Name Bedeutung Datentyp Flags Default 1000:0 Device type Geräte-Typ des EtherCAT-Slaves: Das Lo-Word enthält UINT32 0x00001389 das verwendete CoE Profil (5001). Das Hi-Word enthält (5001 das Modul Profil entsprechend des Modular Device Profi- Index 1008 Device name Index (hex) Name...
- Seite 216 Inbetriebnahme Index 1401 ENC RxPDO-Par Control Index (hex) Name Bedeutung Datentyp Flags Default 1401:0 ENC RxPDO-Par PDO Parameter RxPDO 2 UINT8 0x06 (6 Control 1401:06 Exclude RxPDOs Hier sind die RxPDOs (Index der RxPDO Mapping Ob- OCTET- 00 16 00 00 jekte) angegeben, die nicht zusammen mit RxPDO 2 STRING[6] 00 00...
- Seite 217 Inbetriebnahme Index 1604 STM RxPDO-Map Velocity Index (hex) Name Bedeutung Datentyp Flags Default 1604:0 STM RxPDO-Map Ve- PDO Mapping RxPDO 5 UINT8 0x01 (1 locity 1604:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (STM Outputs UINT32 0x7010:21, 16 Ch.1), entry 0x21 (Velocity)) Index 1605 POS RxPDO-Map Control compact Index Name...
- Seite 218 Inbetriebnahme Index 1800 ENC TxPDO-Par Status compact Index (hex) Name Bedeutung Datentyp Flags Default 1800:0 ENC TxPDO-Par Sta- PDO Parameter TxPDO 1 UINT8 0x06 (6 tus compact 1800:06 Exclude TxPDOs Hier sind die TxPDOs (Index der TxPDO Mapping Objek- OCTET- 01 1A te) angegeben, die nicht zusammen mit TxPDO 1 über- STRING[2]...
- Seite 219 Inbetriebnahme Index 1A05 POS TxPDO-Map Status compact Index Name Bedeutung Datentyp Flags Default 1A05:0 POS TxPDO-Map Max. Subindex UINT8 0x09 (9 Status compact 1A05:01 SubIndex 001 1. PDO Mapping entry (object 0x6020 (POS Inputs UINT32 0x6020:01, 1 Ch.1), entry 0x01 (Busy)) 1A05:02 SubIndex 002 2.
- Seite 220 Inbetriebnahme Index 1C00 Sync manager type Index (hex) Name Bedeutung Datentyp Flags Default 1C00:0 Sync manager type Benutzung der Sync Manager UINT8 0x04 (4 1C00:01 SubIndex 001 Sync-Manager Type Channel 1: Mailbox Write UINT8 0x01 (1 1C00:02 SubIndex 002 Sync-Manager Type Channel 2: Mailbox Read UINT8 0x02 (2 1C00:03...
- Seite 221 Inbetriebnahme Index 1C32 SM output parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C32:0 SM output parameter Synchronisierungsparameter der Outputs UINT8 0x20 (32 1C32:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0001 (1 • 0: Free Run • 1: Synchron with SM 2 Event •...
- Seite 222 Inbetriebnahme Index 1C33 SM input parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C33:0 SM input parameter Synchronisierungsparameter der Inputs UINT8 0x20 (32 1C33:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0022 (34 • 0: Free Run • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
- Seite 223 Inbetriebnahme Index F010 Module list Index (hex) Name Bedeutung Datentyp Flags Default F010:0 Module list Maximaler Subindex UINT8 0x03 (3 F010:01 SubIndex 001 Profilnummer Encoder Profile UINT32 0x000001FF (511 F010:02 SubIndex 002 Profilnummer Stepper Motor Profile UINT32 0x000002BF (703 F010:03 SubIndex 003 Profilnummer Positioning Interface Profile UINT32...
-
Seite 224: El7041-1000 - Objektbeschreibung Und Parametrierung
Inbetriebnahme 5.11 EL7041-1000 - Objektbeschreibung und Parametrierung EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. Parametrierung über das CoE-Verzeichnis (CAN over EtherCAT) Die Parametrierung der Klemme wird über den CoE - Online Reiter (mit Doppelklick auf das ent- sprechende Objekt) bzw. - Seite 225 Inbetriebnahme Index 8010 STM Motor Settings Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8010:0 STM Motor Settings Maximaler Subindex UINT8 0x11 (17 Ch.1 8010:01 Maximal current Maximaler, dauerhafter Spulenstrom des Motors (Einheit: UINT16 0x1388 1 mA) (5000 8010:03 Nominal voltage Nennspannung (Versorgungsspannung) des Motors (Ein- UINT16 0xC350...
-
Seite 226: Kommando-Objekt
Inbetriebnahme Index 8014 STM Motor Settings 2 Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 8014:0 STM Motor Settings 2 Maximaler Subindex UINT8 0x06 (6 Ch.1 8014:01 Acceleration (maxi- Dieser Index legt die maximale Beschleunigung fest (Ma- UINT16 0x07FF mum) ximum: 2047). -
Seite 227: Eingangsdaten
Inbetriebnahme 5.11.4 Eingangsdaten Index 6010 STM Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 6010:0 STM Inputs Ch.1 Maximaler Subindex UINT8 0x10 (16 6010:01 Ready to enable Treiberstufe ist bereit zum Freischalten BOOLEAN 0x00 (0 6010:02 Ready Treiberstufe ist betriebsbereit BOOLEAN 0x00 (0 6010:03... -
Seite 228: Ausgangsdaten
Inbetriebnahme 5.11.5 Ausgangsdaten Index 7010 STM Outputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 7010:0 STM Outputs Ch.1 Maximaler Subindex UINT8 0x21 (33 7010:01 Enable Aktiviert die Ausgangsstufe BOOLEAN 0x00 (0 7010:02 Reset Alle aufgetretenen Fehler werden durch das Setzen die- BOOLEAN 0x00 (0 ses Bits zurückgesetzt (steigende Flanke) -
Seite 229: Hersteller-Konfigurationsdaten (Gerätespezifisch)
Inbetriebnahme Index A010 STM Diag data Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default A010:0 STM Diag data Ch.1 Maximaler Subindex UINT8 0x11 (17 A010:02 Over temperature Innentemperatur der Klemme ist größer als 80°C (siehe BOOLEAN 0x00 (0 Subindex 0xF80F:04 [} 229]) A010:04 Under voltage Versorgungsspannung des Motors ist 20% kleiner, als... -
Seite 230: Standardobjekte
Inbetriebnahme 5.11.9 Standardobjekte Index 1602 STM RxPDO-Map Control Index (hex) Name Bedeutung Datentyp Flags Default 1602:0 STM RxPDO-Map PDO Mapping RxPDO 3 UINT8 0x05 (5 Control 1602:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (STM Outputs UINT32 0x7010:01, 1 Ch.1), entry 0x01 (Enable)) 1602:02 SubIndex 002... - Seite 231 Inbetriebnahme Index 1000 Device type Index (hex) Name Bedeutung Datentyp Flags Default 1000:0 Device type Geräte-Typ des EtherCAT-Slaves: Das Lo-Word enthält UINT32 0x00001389 das verwendete CoE Profil (5001). Das Hi-Word enthält (5001 das Modul Profil entsprechend des Modular Device Profi- Index 1008 Device name Index (hex) Name Bedeutung...
- Seite 232 Inbetriebnahme Index 1403 STM RxPDO-Par Position Index (hex) Name Bedeutung Datentyp Flags Default 1403:0 STM RxPDO-Par Po- PDO Parameter RxPDO 4 UINT8 0x06 (6 sition 1403:06 Exclude RxPDOs Hier sind die RxPDOs (Index der RxPDO Mapping Ob- OCTET- 04 16 05 16 jekte) angegeben, die nicht zusammen mit RxPDO 4 STRING[6] 06 16...
- Seite 233 Inbetriebnahme Index 1604 STM RxPDO-Map Velocity Index (hex) Name Bedeutung Datentyp Flags Default 1604:0 STM RxPDO-Map Ve- PDO Mapping RxPDO 5 UINT8 0x01 (1 locity 1604:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (STM Outputs UINT32 0x7010:21, 16 Ch.1), entry 0x21 (Velocity)) Index 1A00 ENC TxPDO-Map Status compact Index (hex) Name Bedeutung...
- Seite 234 Inbetriebnahme Index 1A01 ENC TxPDO-Map Status Index (hex) Name Bedeutung Datentyp Flags Default 1A01:0 ENC TxPDO-Map PDO Mapping TxPDO 2 UINT8 0x11 (17 Status 1A01:01 SubIndex 001 1. PDO Mapping entry (1 bits align) UINT32 0x6000:01, 1 1A01:02 SubIndex 002 2. PDO Mapping entry (object 0x6000 (ENC Inputs UINT32 0x6000:02, 1 Ch.1), entry 0x02 (Latch extern valid))
- Seite 235 Inbetriebnahme Index 1C13 TxPDO assign Index (hex) Name Bedeutung Datentyp Flags Default 1C13:0 TxPDO assign PDO Assign Inputs UINT8 0x02 (2 1C13:01 Subindex 001 1. zugeordnete TxPDO (enthält den Index des zugehöri- UINT16 0x1A00 gen TxPDO Mapping Objekts) (6656 1C13:02 Subindex 002 2.
- Seite 236 Inbetriebnahme Index 1C32 SM output parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C32:0 SM output parameter Synchronisierungsparameter der Outputs UINT8 0x20 (32 1C32:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0001 (1 • 0: Free Run • 1: Synchron with SM 2 Event •...
- Seite 237 Inbetriebnahme Index 1C33 SM input parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C33:0 SM input parameter Synchronisierungsparameter der Inputs UINT8 0x20 (32 1C33:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0022 (34 • 0: Free Run • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
-
Seite 238: Diagnose - Diag Messages
In der zum EtherCAT-Gerät gehörigen ESI/XML-Datei werden die DiagMessages in Textform erklärt: Anhand der in der DiagMessage enthaltenen Text-ID kann die entsprechende Klartextmeldung in den Sprachen gefunden werden, die in der ESI/XML enthalten sind. Üblicherweise sind dies bei Beckhoff- Produkten deutsch und englisch. -
Seite 239: Implementierung Twincat System Manager
• Klartext-Meldung nach ESI/XML Angabe Die Bedeutung der Buttons ist selbsterklärend. Interpretation Aufbau der Text-ID Der Aufbau der MessageID unterliegt keiner Standardisierung und kann herstellerspezifisch definiert werden. Bei Beckhoff EtherCAT-Geräten (EL, EP) lautet er nach xyzz üblichwerweise: 0: Systeminfo 1: General Fehlernummer 1: Info... - Seite 240 Diagnose - Diag Messages Text-ID Text (nur englisch) Ursache 0x0001 Information System No error No error 0x0002 Information System Communication established Communication established 0x0003 Information System Initialisation: 0x%X, 0x%X, 0x allgemeine Information, Parameter je nach Ereignis. In- terpretation siehe Gerätedokumentation. 0x1000 Information System...
- Seite 241 Diagnose - Diag Messages Text-ID Text (nur englisch) Ursache 0x8135 Fehler Allgemein Cycletime has to be a multiple of Die IO- oder NC-Zykluszeit ist nicht ganzzahlig durch 125 µs 125 µs teilbar 0x8200 Fehler Kommunikation Fehler beim Schreiben 0x8201 Fehler Kommunikation No communication to field-side - Es ist keine Spannung an den Powerkontakten angelegt (Auxiliary voltage missing) - Ein Firmware Update ist fehlgeschlagen...
-
Seite 242: Anhang
Detaillierte Informationen hierzu entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung. Firmware Kompatibilität Beckhoff EtherCAT Geräte werden mit dem aktuell verfügbaren letzten Firmware-Stand ausgeliefert. Dabei bestehen zwingende Abhängigkeiten zwischen Firmware und Hardware; eine Kompatibilität ist nicht in jeder Kombination gegeben. Die unten angegebene Übersicht zeigt auf welchem Hardware-Stand eine Firmware betrieben werden kann. - Seite 243 2010/02 EL7041-1000-0017 2011/10 EL7041-1000-0018 2012/01 EL7041-1000-0019 2012/07 EL7041-1000-0020 2014/11 2015/05 EL7041-1000-0021 2016/02 *) Zum Zeitpunkt der Erstellung dieser Dokumentation ist dies der aktuelle kompatible Firmware/Hardware- Stand. Überprüfen Sie auf der Beckhoff Webseite, ob eine aktuellere Dokumentation vorliegt. EL70x1 Version: 4.6...
-
Seite 244: Firmware Update El/Es/Elm/Em/Epxxxx
Anhang Firmware Update EL/ES/ELM/EM/EPxxxx In diesem Kapitel wird das Geräteupdate für Beckhoff EtherCAT Slaves der Serien EL/ES, ELM, EM, EK und EP beschrieben. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden. Speicherorte In einem EtherCAT-Slave werden an bis zu 3 Orten Daten für den Betrieb vorgehalten: •... -
Seite 245: Gerätebeschreibung Esi-File/Xml
Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder sogar zur endgültigen Außerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit dem Beckhoff Support ausgeführt werden. Anzeige der Slave-Kennung ESI Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibung festzustellen, ist im TwinCAT-Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:... - Seite 246 Anhang Abb. 201: Rechtsklick auf das EtherCAT Gerät bewirkt das Scannen des unterlagerten Feldes Wenn das gefundene Feld mit dem konfigurierten übereinstimmt, erscheint Abb. 202: Konfiguration identisch ansonsten erscheint ein Änderungsdialog, um die realen Angaben in die Konfiguration zu übernehmen. Abb. 203: Änderungsdialog In diesem Beispiel in Abb.
-
Seite 247: Änderung Erst Nach Neustart Wirksam
Anhang Änderung der Slave-Kennung ESI Die ESI/EEPROM-Kennung kann unter TwinCAT wie folgt aktualisiert werden: • Es muss eine einwandfreie EtherCAT-Kommunikation zum Slave hergestellt werden • Der State des Slave ist unerheblich • Rechtsklick auf den Slave in der Online-Anzeige führt zum Dialog EEPROM Update, Abb. EEPROM Update Abb. 204: EEPROM Update Im folgenden Dialog wird die neue ESI-Beschreibung ausgewählt, s. -
Seite 248: Erläuterungen Zur Firmware
• offline: in der EtherCAT Slave Information ESI/XML kann der Default-Inhalt des CoE enthalten sein. Dieses CoE-Verzeichnis kann nur angezeigt werden, wenn es in der ESI (z.B. "Beckhoff EL5xxx.xml") enthalten ist. Die Umschaltung zwischen beiden Ansichten kann über den Button Advanced vorgenommen wer- den. -
Seite 249: Update Controller-Firmware *.Efw
Firmware Update. Abb. 207: Firmware Update Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z.B. durch den Beckhoff Support vorliegen. Gültig für TwinCAT 2 und 3 als EtherCAT Master. • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1ms schalten (default sind im ConfigMode 4 ms). -
Seite 250: Fpga-Firmware *.Rbf
Anhang • EtherCAT Master in PreOP schalten • Slave in INIT schalten (A) • Slave in BOOTSTRAP schalten • Kontrolle des aktuellen Status (B, C) • Download der neuen *efw-Datei, abwarten bis beendet. Ein Passwort wird in der Regel nicht benötigt. •... - Seite 251 Anhang Abb. 208: Versionsbestimmung FPGA-Firmware Falls die Spalte Reg:0002 nicht angezeigt wird, klicken sie mit der rechten Maustaste auf den Tabellenkopf und wählen im erscheinenden Kontextmenü, den Menüpunkt Properties. Abb. 209: Kontextmenu Eigenschaften (Properties) In dem folgenden Dialog Advanced Settings können Sie festlegen, welche Spalten angezeigt werden sollen. Markieren Sie dort unter Diagnose/Online Anzeige das Kontrollkästchen vor '0002 ETxxxx Build' um die Anzeige der FPGA-Firmware-Version zu aktivieren.
- Seite 252 Ältere Firmware-Stände können nur vom Hersteller aktualisiert werden! Update eines EtherCAT-Geräts Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z.B. durch den Beckhoff Support vorliegen: • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1 ms schalten (default sind im ConfigMode 4 ms).
- Seite 253 Anhang • Wählen Sie im TwinCAT System-Manager die Klemme an, deren FPGA-Firmware Sie aktualisieren möchten (im Beispiel: Klemme 5: EL5001) und klicken Sie auf dem Karteireiter EtherCAT auf die Schaltfläche Weitere Einstellungen: • Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf die Schaltfläche Schreibe FPGA: EL70x1 Version: 4.6...
-
Seite 254: Gleichzeitiges Update Mehrerer Ethercat-Geräte
Anhang • Wählen Sie die Datei (*.rbf) mit der neuen FPGA-Firmware aus und übertragen Sie diese zum EtherCAT-Gerät: • Abwarten bis zum Ende des Downloads • Slave kurz stromlos schalten (nicht unter Spannung ziehen!). Um die neue FPGA-Firmware zu aktivieren ist ein Neustart (Aus- und Wiedereinschalten der Spannungsversorgung) des EtherCAT- Geräts erforderlich •... -
Seite 255: Wiederherstellen Des Auslieferungszustandes
Anhang Wiederherstellen des Auslieferungszustandes Um den Auslieferungszustand der Backup-Objekte bei den ELxxxx-Klemmen wiederherzustellen, kann im TwinCAT System Manger (Config-Modus) das CoE-Objekt Restore default parameters, Subindex 001angewählt werden (s. Abb. Auswahl des PDO‚ Restore default parameters) Abb. 212: Auswahl des PDO Restore default parameters Durch Doppelklick auf SubIndex 001 gelangen Sie in den Set Value -Dialog. -
Seite 256: Support Und Service
Anhang Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Support Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:... - Seite 257 Abbildungsverzeichnis Abbildungsverzeichnis Abb. 1 EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer und Revi- sionskennzeichnung (seit 2014/01) ..................... Abb. 2 EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer ..Abb. 3 CU2016 Switch mit Seriennummer/ Chargennummer..............Abb. 4 EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418............................
- Seite 258 Abbildungsverzeichnis Abb. 40 EL7041-0000 Anschlussbelegung ....................Abb. 41 EL7041-0001 LEDs ........................Abb. 42 EL7041-0001 Anschlussbelegung ....................Abb. 43 EL7041-1000 LEDs ........................Abb. 44 EL7041-1000 Anschlussbelegung ....................Abb. 45 Bipolaren Motoren ........................Abb. 46 Biopolare Ansteuerung eines unipolaren Motors................. Abb. 47 Anschluss eines Encoders (24 V)....................Abb.
- Seite 259 Abbildungsverzeichnis Abb. 86 Aufruf im Systemmanager (TwinCAT 2) ..................Abb. 87 Aufruf in VS Shell (TwinCAT 3) ....................Abb. 88 Übersicht Netzwerkschnittstellen....................Abb. 89 Eigenschaft von EtherCAT Gerät (TwinCAT 2): Klick auf „Kompatible Geräte…“ von „Adapter“ Abb. 90 Windows-Eigenschaften der Netzwerkschnittstelle ..............Abb. 91 Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports ............ Abb.
- Seite 260 Abbildungsverzeichnis Abb. 129 Name/Revision Klemme ......................116 Abb. 130 Korrekturdialog mit Änderungen ....................116 Abb. 131 Dialog “Change to Compatible Type…” (links: TwinCAT 2; rechts TwinCAT 3)......116 Abb. 132 TwinCAT 2 Dialog Change to Alternative Type ................117 Abb. 133 „Baumzweig“ Element als Klemme EL3751 ................117 Abb.
- Seite 261 Abbildungsverzeichnis Abb. 175 Settings-Objekte im CoE ......................148 Abb. 176 Diagnose-Objekte im CoE ......................150 Abb. 177 Ablauf-Diagramm eines Fahrauftrages..................152 Abb. 178 Absolute Positionierung ....................... 153 Abb. 179 Relative Positionierung ........................ 154 Abb. 180 Endlos fahren..........................154 Abb. 181 Additive Positionierung ........................ 154 Abb.