Beckhoff BX5100 Dokumentation
Busklemmen-controller für canopen
Inhaltsverzeichnis
Quicklinks
Kapitel
Inhaltsverzeichnis

Verwandte Anleitungen für Beckhoff BX5100















Inhaltszusammenfassung für Beckhoff BX5100
- Seite 1 Dokumentation BX5100 Busklemmen-Controller für CANopen Version: 2.2.0 Datum: 17.09.2019...
-
Seite 3: Inhaltsverzeichnis
Hinweise zur Dokumentation ...................... 7 Sicherheitshinweise ........................... 8 Ausgabestände der Dokumentation .................... 9 2 Produktübersicht ............................. 11 Busklemmen-Controller der BX-Serie ..................... 11 Prinzip der Busklemme........................ 12 Das Beckhoff Busklemmensystem .................... 13 Technische Daten.......................... 15 2.4.1 Technische Daten CANopen SSB Interface .............. 15 2.4.2 Technische Daten - BX.................... 16 2.4.3... - Seite 4 Objektverzeichnis .......................... 158 6.3.1 Objektverzeichnis - Struktur................... 158 6.3.2 Objektliste ........................ 159 6.3.3 Objekte und Daten...................... 161 6.3.4 Objekte und Daten der BX5100/BC5150............... 183 ADS-Kommunikation ........................ 184 6.4.1 ADS-Dienste ........................ 184 7 Fehlerbehandlung und Diagose ...................... 185 Diagnose ............................ 185 Diagnose-LEDs .......................... 186 Diagnose-Display .......................... 190 8 Anhang .............................. 191...
- Seite 5 Inhaltsverzeichnis Prüfnormen für Geräteprüfung ...................... 214 Literaturverzeichnis ........................ 215 8.10 Abkürzungsverzeichnis........................ 216 8.11 Support und Service ........................ 217 BX5100 Version: 2.2.0...
- Seite 6 Inhaltsverzeichnis Version: 2.2.0 BX5100...
-
Seite 7: Vorwort
Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. -
Seite 8: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 9: Ausgabestände Der Dokumentation
• Aktualisierung zu Firmware-Version 1.01 1.0.0 • Aktualisierung zu Firmware-Version 1.00 Firmware des BX5100 Nach dem Einschalten zeigt der BX-Controller seine Firmware-Version für ca. drei Sekunden auf dem Display an. Zum Update Ihrer Firmware benötigen Sie ein serielles Kabel, die Konfigurations-Software KS2000 oder das Firmware-Update-Programm. - Seite 10 • Wenn nach einem Online Change sofort das Bootprojekt erzeugt wird, kommt eine Fehlermeldung, dass der Dienst noch nicht bereit ist. 1.00 / 0.99 • Feldbus Diagnose in der TwinCAT Konfiguration implementiert *) Die Versionen 1.xx unterstützten nur das neue blaue Display! Die Versionen 0.99x unterstützten nur das alte grüne Display! Version: 2.2.0 BX5100...
-
Seite 11: Produktübersicht
Zusätzlich verfügen die BX-Controller über zwei serielle Schnittstellen: eine für die Programmierung, die andere zur freien Nutzung. Im Gerät selbst enthalten sind ein beleuchtetes LC-Display (2 Zeilen mit je 16 Zeichen) mit Joystickschalter sowie eine Echtzeit-Uhr. Über den integrierten Beckhoff Smart System Bus (SSB) können weitere Peripheriegeräte, z. B. Displays, angeschlossen werden. -
Seite 12: Prinzip Der Busklemme
Beckhoff Steuerungen ist die Automatisierungssoftware TwinCAT Grundlage für die Parametrierung und Programmierung. Dem Anwender stehen also die gewohnten TwinCAT Werkzeuge, wie z. B. SPS- Programmieroberfläche, System Manager und TwinCAT Scope zur Verfügung. Der Datenaustausch erfolgt wahlweise über die serielle Schnittstelle (COM1) oder über den Feldbus via Beckhoff PC-Feldbuskarten FCxxxx. Konfiguration Die Konfiguration erfolgt ebenfalls mit TwinCAT. -
Seite 13: Das Beckhoff Busklemmensystem
Buskoppler für alle gängigen Bussysteme Das Beckhoff Busklemmen-System vereint die Vorteile eines Bussystems mit den Möglichkeiten der kompakten Reihenklemme. Busklemmen können an allen gängigen Bussystemen betrieben werden und verringern so die Teilevielfalt in der Steuerung. Dabei verhalten sich Busklemmen wie herkömmliche Anschaltungen dieses Bussystems. - Seite 14 Buskoppler entsprechen den für das Feldbus-System üblichen Zeiten. Bei der Umstellung auf ein anderes Bussystem beachten Sie im Falle großer Zykluszeiten des Bussystems die Änderung der Timeout- Zeiten. Die Schnittstellen Ein Buskoppler besitzt sechs unterschiedliche Anschlussmöglichkeiten. Diese Schnittstellen sind als Steckverbindungen und Federkraftklemmen ausgelegt. Version: 2.2.0 BX5100...
-
Seite 15: Technische Daten
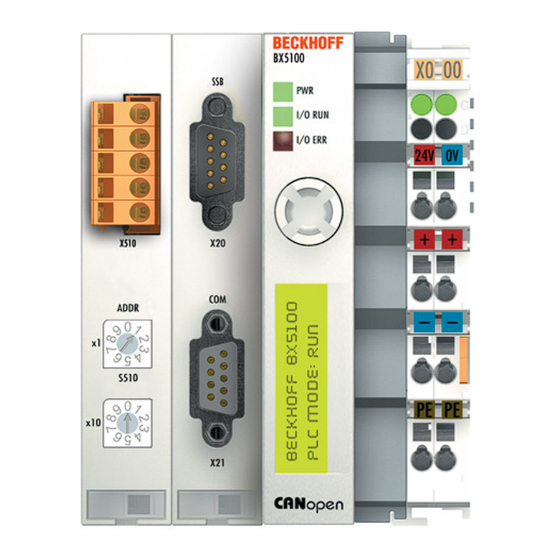
Produktübersicht Technische Daten 2.4.1 Technische Daten CANopen SSB Interface Abb. 2: BX5100 Systemdaten CANopen (BX5100) Anzahl der Knoten 63, mit Repeater 99 Anzahl der E/A-Punkte steuerungsabhängig Übertragungsmedium abgeschirmtes, verdrilltes Kupferkabel, 2 x Signal, 1 x CAN Ground (empfohlen) Leitungslänge 5000 m 2500 m 1000 m... -
Seite 16: Technische Daten - Bx
Produktübersicht 2.4.2 Technische Daten - BX Technische Daten BX3100 BX5100 BX5200 BX8000 BX9000 Prozessor 16 Bit Mikrocontroller Diagnose LEDs 2 x Spannungsversorgung, 2 x K-Bus Display FSTN 2 x 16 Zeilen Display für Diagnose oder eigene Texte, beleuchtet Schalter Joystickschalter für Parametrierung und Diagnose interne akkugepufferte Uhr für Zeit und Datum... - Seite 17 Produktübersicht Technische Daten BX3100 BX5100 BX5200 BX8000 BX9000 Digitale Peripheriesignale 2040 Ein-/Ausgänge Analoge Peripheriesignale 1024 Ein-/Ausgänge Konfigurationsmöglichkeit über TwinCAT oder die Steuerung maximale Byte-Anzahl feldbusabhängig Feldbus maximale Byte-Anzahl 2048 Byte Eingangsdaten, 2048 Byte Ausgangsdaten Feldbus-Anschluss D-Sub, 9-pin Open Style Connector, 5-pin RJ45 Spannungsversorgung 24 V...
-
Seite 18: Technische Daten - Sps
Produktübersicht Mechanische Daten BX3100 BX5100 BX5200 BX8000 BX9000 Gewicht ca. 170 g Abmessungen (B x H x T) ca. 83 mm x 100 mm x 90 mm (BX8000: ca. 65 mm x 100 mm x 90 mm) Montage mit Verriegelung, auf Tragschiene (35 mm Hutschiene) Einbaulage Beliebig Anschlussquerschnitt 0,08 mm²... -
Seite 19: Montage Und Verdrahtung
Montage 3.1.1 Abmessungen Das Beckhoff Busklemmen-System zeichnet sich durch geringes Bauvolumen und hohe Modularität aus. Für die Projektierung muss ein Buskoppler und eine Anzahl von Busklemmen vorgesehen werden. Die Abmessungen der Busklemmen-Controller sind unabhängig vom Feldbus-System. Abb. 3: BX3100, BX5100, BX5200, BX9000 BX5100 Version: 2.2.0... -
Seite 20: Tragschienenmontage
Achten Sie darauf, nicht auf das Display zu drücken, wenn Sie den BX-Controller auf die Tragschiene drücken. Andernfalls kann das Display beschädigt werden. 2. Drücken Sie den BX-Controller nun auf die Tragschiene. 3. Nach dem Aufrasten auf die Tragschiene, schieben Sie die Zuglaschen wieder in die Ausgangsstel- lung zurück. Version: 2.2.0 BX5100... -
Seite 21: Verdrahtung
3.2.1 Potentialgruppen, Isolationsprüfung und PE Potentialgruppen Ein Beckhoff Busklemmenblock verfügen in der Regel über drei verschiedene Potentialgruppen: • Die Feldbusschnittstelle ist (außer bei einzelnen Low Cost Kopplern) galvanisch getrennt und bildet die erste Potentialgruppe. • Buskoppler- / Busklemmen-Controller-Logik, K-Bus und Klemmenlogik bilden eine zweite galvanisch getrennte Potentialgruppe. -
Seite 22: Abb. 8 Potentialgruppen Eines Busklemmenblocks
Versorgungsschiene dar. Der Buskoppler- / Busklemmen-Controller kann auch zur Einspeisung der Powerkontakte eingesetzt werden. PE-Powerkontakte Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist aus Sicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125 A ableiten. Version: 2.2.0 BX5100... -
Seite 23: Spannungsversorgung
Eine Spannungsquelle entsprechend NEC class 2 darf nicht seriell oder parallel mit einer anderen NEC class 2 entsprechenden Spannungsquelle verbunden werden! GEFAHR Keine unbegrenzten Spannungsquellen! Zur Einhaltung der UL-Anforderungen dürfen die BX-Controller nicht mit unbegrenzten Spannungsquellen verbunden werden! BX5100 Version: 2.2.0... -
Seite 24: Abb. 10 Klemmstellen Zur Versorgung Des Busklemmen-Controllers
Die paarweise Anordnung und die elektrische Verbindung zwischen den Speiseklemmkontakten ermöglicht das Durchschliefen der Anschlussdrähte zu unterschiedlichen Klemmpunkten. Die Strombelastung über den Powerkontakt darf 10 A nicht dauerhaft überschreiten. Die Strombelastbarkeit zwischen zwei Federkraftklemmen ist mit der Belastbarkeit der Verbindungsdrähte identisch. Version: 2.2.0 BX5100... -
Seite 25: Programmierkabel Für Com1
Das Programmierkabel bietet die Möglichkeit über die Schnittstelle COM 1 den BX-Controller zu programmieren und an der Schnittstelle COM 2 ein weiteres serielles Gerät anzuschließen. Achten Sie im eingebauten Zustand auf die maximale Bauhöhe des Steckers. Abb. 12: Programmierkabel ZK1000-0030 - COM 1 und COM 2 BX5100 Version: 2.2.0... -
Seite 26: Ssb- Und Com-Schnittstellen
Das Grundmodul der BX-Controller besitzt die Schnittstellen COM1, COM2 und SSB (Smart System. COM1 und COM2 sind auf einer D-Sub-Buchse untergebracht. Ein spezielles Programmierkabel (ZK1000-0030) mit dem Sie beide Schnittstellen verwenden können, können Sie bei Beckhoff bestellen. Die Schnittstelle COM2 Version: 2.2.0... -
Seite 27: Canopen Verkabelung
RS485 D+ COM1 RS232 TxD COM1 RS232 RxD VCC +5 V COM2 RS485 D- COM2 RS232 RxD COM2 RS232 TxD 3.2.5 CANopen Verkabelung Hinweise für die Überprüfung der CAN-Verdrahtung finden sich im Kapitel Fehlersuche / Trouble Shooting. BX5100 Version: 2.2.0... -
Seite 28: Abb. 17 Abschluss Des Busses Mit Abschlusswiderstand 120 Ohm
*) Häufig findet man in der Literatur für CAN die Angabe 40 m bei 1 MBit/s. Dies gilt jedoch nicht für Netze mit optoentkoppelten CAN-Controllern. Die worst case Berechnung mit Optokopplern ergibt bei 1 MBit/s eine maximale Buslänge von 5 m - erfahrungsgemäß sind jedoch 20 m problemlos erreichbar. Bei Buslängen über 1000 m kann der Einsatz von Repeatern notwendig werden. Version: 2.2.0 BX5100... -
Seite 29: Abb. 19 Beispieltopologie Stichleitungen
Abb. 19: Beispieltopologie Stichleitungen 3.2.5.4 Sternverteiler (Multiport Tap) Beim Einsatz von passiven Verteilern ("Multiport Taps"), z. B. der Beckhoff Verteilerbox ZS5052-4500 sind kürzere Stichleitungslängen einzuhalten. Die folgende Tabelle gibt die maximalen Stichleitungslängen und die maximale Länge der Trunk Line (ohne Stichleitungen) an: Baud-Rate Länge Stichleitung bei Multi-... -
Seite 30: Abb. 20 Aufbau Can-Kabel Zb5100
• Wellenwiderstand (60 kHz): 120 Ohm • Leiterwiderstand < 80 Ohm/km • Mantel: PVC grau, Außendurchmesser 7,3 +/- 0,4 mm • Gewicht: 64 kg/km. • Bedruckt mit "Beckhoff ZB5100 CAN-BUS 2x2x0.25" und Metermarkierung (Längenangaben, alle 20cm) Abb. 20: Aufbau CAN-Kabel ZB5100 ZB5200 CAN/DeviceNet-Kabel Das Kabelmaterial ZB5200 entspricht der DeviceNet Spezifikation und eignet sich ebenso für CANopen Systeme. -
Seite 31: Schirmung
In diesem Fall sollte der Schirm an den Kopplern nicht aufgelegt werden - aber dennoch komplett durchverbunden sein. Hinweise für die Überprüfung der CAN-Verdrahtung finden sich im Kapitel Fehlersuche / Trouble Shooting. 3.2.5.7 Kabelfarben Vorschlag für die Verwendung der Beckhoff CAN-Kabel an Busklemme und Feldbus Box: Pin BK51x0 Pin BK5151 Pin Feld- Funktion... -
Seite 32: Abb. 22 Pinbelegung Bk5151, El6751
Die nicht aufgeführten Pins sind nicht verbunden. Die Tragschienenkontaktfeder und der Steckerschirm sind durchverbunden. Hinweis: an Pin 9 darf eine Hilfsspannung bis 30 V angeschlossen sein (wird von manchen CAN Geräten zur Versorgung der Transceiver genutzt). Abb. 22: Pinbelegung BK5151, EL6751 FC51x2: Abb. 23: FC51x2 Version: 2.2.0 BX5100... -
Seite 33: Lc5100: Busanschluss Über Federkraftklemmen
Hier kann die mitgelieferte CANopen- Verbindungsbuchse eingesteckt werden. Abb. 24: Belegung Verbindungsbuchse BK51x0/BX5100 Das linke Bild zeigt die Buchse im Buskoppler BK51x0/BX5100. Pin 5 ist dabei der oberste Pin auf der Steckerleiste. Pin 5 ist nicht benutzt. Pin 4 ist die CAN-High-Leitung, Pin 2 die CAN-Low-Leitung und an Pin 3 wird der Schirm aufgelegt (ist über eine R/C-Schaltung mit der Tragschiene verbunden). -
Seite 34: Abb. 25 Lc5100
Bei der Feldbus Box IPxxxx-B510, IL230x-B510 und IL230x-C510 wird der Busanschluss mit 5poligen M12 Steckverbindern ausgeführt. Abb. 26: Pinbelegung M12 Stecker Feldbus Box Für das Feldbus Box System bietet Beckhoff feldkonfektionierbare Stecker, Passivverteiler, Abschlusswiderstände sowie eine große Auswahl an vorkonfektionierten Kabeln an. Details finden sich im Katalog oder unter www.beckhoff.de. -
Seite 35: Parametrierung Und Inbetriebnahme
Die Busklemmen mappen sich in der Reihenfolge wie diese gesteckt sind, erst die komplexen Busklemmen, dann die digitalen Busklemmen. Das Mapping der komplexen Busklemmen ist: • Word-Alignment • komplexe Darstellung VORSICHT Prozessabbild ist abhängig von angesteckten Klemmen! Das Prozessabbild verändert sich, sobald eine Klemme dazu gesteckt wird oder entfernt wird! BX5100 Version: 2.2.0... - Seite 36 ◦ PC mit TwinCAT 2.10 Build 1322 • Über das serielle ADS TwinCAT 2.9 Build 1010 ◦ BX3100 Version 1.00 ◦ BX5100 Version 1.00 ◦ BX5200 Version 1.10 ◦ BX8000 Version 1.00 ◦ BC3150, BC5150, BC5250, BC9050, BC9020, BC9120 ab Firmware B0 ◦...
-
Seite 37: Anlegen Einer Twincat-Konfiguration
Um einen Busklemmen-Controller der Serien BCxx50, BCxx20 oder BXxx00 zu konfigurieren muss im System-Manager ein BX-File angelegt werden. Zur Vereinfachung sind die Grundgeräte schon als File vorbereitet. Dazu öffnen Sie mit New from Template den entsprechenden Busklemmen-Controller. Abb. 28: Anlegen einer TwinCAT-Konfiguration Wählen Sie den entsprechenden Busklemmen-Controller aus. BX5100 Version: 2.2.0... -
Seite 38: Download Einer Twincat-Konfiguration
Tragen Sie die serielle ADS-Verbindung ein, wie unter dem Kapitel Serielles ADS [} 44] beschrieben ist. ADS-Protokoll über den Feldbus (nur BC3150, BC5150, BC9x20, BC9050, BX3100, BX5100, BX9000) Vorraussetzung hierfür ist, dass TwinCAT als Master arbeitet und sich im Datenaustausch befindet, d.h. die physikalische, wie auch die Feldbus-Konfiguration muss abgeschlossen sein und der Datenaustausch vom Master (z. B. -
Seite 39: Abb. 30 Download Einer Twincat-Konfiguration
Im Config Mode / FreeRun kann man jetzt die Konfiguration zum Busklemmen-Controller herunterspielen. Wenn der Busklemmen-Controller im Stop Mode ist, ist die ADS-Kommunikation noch nicht aktiviert. Ein Download der Konfiguration ist dann nicht möglich. Zum Aktivieren der TwinCAT-Konfiguration wählen Sie Ctrl+Shift+F4 oder Activate Configuration. Abb. 33: Aktivieren der TwinCAT-Konfiguration BX5100 Version: 2.2.0... -
Seite 40: Upload Einer Twincat-Konfiguration
Tragen Sie die serielle ADS-Verbindung ein, wie unter dem Kapitel Serielles ADS [} 44] beschrieben ist. ADS-Protokoll über den Feldbus (nur BC3150, BC5150, BC9x20, BC9050, BX3100, BX5100, BX9000) Voraussetzung hierfür ist, dass TwinCAT als Master arbeitet und sich im Datenaustausch befindet, d.h. die physikalische, wie auch die Feldbus Konfiguration muss abgeschlossen sein und der Datenaustausch vom Master (z. B. -
Seite 41: Ressourcen Im Busklemmen-Controller
Der Mapping Code wird für die Berechnung der TwinCAT Konfiguration benötigt (siehe Abb. Speicher für das Code Mapping). Die Prozentzahlen werden hier zusammen addiert, in dem Beispiel aus Abb. Speicher für das Code Mapping sind 8% des Speichers für die Mapping-Berechnung belegt. BX5100 Version: 2.2.0... -
Seite 42: Abb. 38 Speicher Für Das Code Mapping
Abb. Code und Daten Speicher (1) "Used Plc Code" verbrauchter PLC Code, Angabe in %. Abb. Code und Daten Speicher (2) "Used Plc Data" verbrauchter PLC Daten, Angabe Speicher in %. Abb. Code und Daten Speicher (3) "Used Plc Source" verbrauchter Source Code, Angabe in %. Version: 2.2.0 BX5100... -
Seite 43: Abb. 40 Code Und Daten Speicher
Abb. Sonstiger Speicher (2) "Used Huge Heap" wird für die ADS Kommunikation benötigt. Angabe in %. Dieser Wert sollte kleiner 30 % betragen. Abb. Sonstiger Speicher (3) "Used File Area" wird für die TwinCAT Konfiguration, dem TSM-File und dem 16 kByte Flash Zugriff benötigt. Angabe in %. Abb. 41: Sonstiger Speicher BX5100 Version: 2.2.0... -
Seite 44: Ads-Verbindung Über Die Serielle Schnittstelle
Wenn Sie die AMS-Net-ID erneut ändern möchten, müssen Sie den Busklemmen-Controller zuerst neu starten, so dass die AMS Net Id wieder auf die Default AMS-Net-ID "1.1.1.1.1.1" zurückgesetzt wird. Nun können sie die AMS-Net-ID wiederum einmal ändern. Version: 2.2.0 BX5100... -
Seite 45: Erst Beim Zweiten Aufruf Können Sie Strings Eingeben
Es gibt zwei Konfigurationsarten. In der Default Konfiguration (Auslieferungszustand) mappen sich die CANopen Daten, der CANopen Slave Schnittstelle, ab der Adresse 1000 des BX5100/BC5150 und es sind die ersten 4 PDOs aktiviert. In der TwinCAT Konfiguration kann man über den System Manager eine beliebige Konfiguration erstellen und Variablen beliebig mit der CANopen Slave Schnittstelle verknüpfen. - Seite 46 0x1404 Sub-Index 2 Länge 1 Wert 0xFF (nicht unbedingt notwendig zur Aktivierung des PDOs) Es können beim BX5100 maximal 32 PDOs in jede Richtung verwendet werden (32 TxPDOs und 32 RxPDOs). Es können beim BC5150 maximal 16 PDOs in jede Richtung verwendet werden (16 TxPDOs und 16 RxPDOs).
-
Seite 47: Abb. 43 Sendeverzögerungszeit (Inhibit Time)
Für die Konfiguration benötigen Sie den TwinCAT System Manager und eine ADS-Verbindung zum Busklemmen-Controller. Die ADS-Verbindung kann über die serielle Schnittstelle (siehe serielles ADS) oder den Feldbus (PCI Karte FC510x und die CAN Slave-Schnittstelle des BX5100) erfolgen. BX5100 Version: 2.2.0... -
Seite 48: Slave-Adresse
Busklemmen Controller mit der Initialisierung fort. Ein Software-Reset führt nicht zur erneuten Suche der Baud-Rate. Die vorher aktive Baud-Rate bleibt erhalten. Bit Timing Folgende Baud-Raten und Bit-Timing Registereinstellungen werden von den BECKHOFF CANopen-Geräten unterstützt: Baud-Rate [kBaud] BTR0 BTR1... -
Seite 49: K-Bus
Wert erhalten, wenn dies nicht in Ihrem PLC-Projekt beachtet wurde. Clear Outputs on Breakpoint Wenn Breakpoints im PLC Control gesetzt werden, wird der K-Bus nicht mehr bearbeitet, das heißt die Ausgänge werden in den sichern Zustand, sprich null, gesetzt. BX5100 Version: 2.2.0... - Seite 50 Anzeige der Zykluszeit für Task 1, K-Bus, Bearbeitung Feldbus und die Auslastung des SSB. Abb. 47: Karteireiter BX Diag Factory Settings - Der Busklemmen-Controller wird in seinen Auslieferungszustand gesetzt. Mit Restart System oder aus- und einschalten sind diese Einstellungen wieder gültig (Display DEFAULT-CONFIG). Reset Maximum Values - löscht die Maximalen Werte Version: 2.2.0 BX5100...
-
Seite 51: Plc
Im PLC-Control muss ein gültiges Projekt übersetzt und gespeichert sein. Diese Daten werden als *.tpy Datei abgespeichert. Um ein PLC-Projekt einzufügen klicken Sie mit der rechten Maustaste auf PLC- Configuration. Wählen Sie Ihr aktuelles PLC Projekt aus. Abb. 48: Auswahl des PLC-Projekts Verbinden Sie die PLC-Variable mit der Hardware (z. B. digitale Busklemme). BX5100 Version: 2.2.0... - Seite 52 Nachdem alle Verknüpfungen erstellt sind aktivieren Sie die Konfiguration Actions/Activate Configuration (Ctrl+Shift+F4) und Starten Sie TwinCAT Set/Reset TwinCAT to Run Mode. Achten Sie darauf, dass Sie das richtige Zielsystem angewählt haben (unten rechts im Fenster des System-Managers). Abb. 50: Anzeige des Ziel-Systems Version: 2.2.0 BX5100...
-
Seite 53: Messen Der Plc-Zykluszeit
Zykluszeit der PLC gemessen werden. Um einen Problemlosen Betrieb zu garantieren, muss die eingestellte Task-Zeit 20 bis 30 % höher sein als die gemessene gesamt Zykluszeit. Eine genauere Aufschlüsselung der Zykluszeit fingen Sie unter der Beschreibung K-Bus-Reiter [} 49]. Die gesamte Zykluszeit wird mit der TcBase Bibliothek angezeigt (siehe TcBase.lbx oder TcBaseBCxx50.lbx). BX5100 Version: 2.2.0... -
Seite 54: Ssb
Das Sync-Telegramm wird in Abhängigkeit zur PLC-Task-Zeit übertragen. Ist eine Taskzeit von 20 ms eingestellt wird auch das Sync-Telegramm alle 20 ms asynchron zur PLC Laufzeit versendet. Das Sync- Telegramm wird erst erzeugt, wenn ein Teilnehmer dieses Benötigt und dieser Konfiguriert wird. Das Sync-Telegramm wird ab der Firmware 1.12 unterstützt. Version: 2.2.0 BX5100... - Seite 55 Abb. 53: Anfügen eines weiteren Gerätes Wählen Sie den CANopen Master SSB aus und bestätigen Sie mit OK. Abb. 54: Auswahl des CANopen Masters SSB Als nächstes kann mit der linken Maustaste auf dem SSB-Device ein CANopen-Knoten angewählt werden. BX5100 Version: 2.2.0...
- Seite 56 Parametrierung und Inbetriebnahme Abb. 55: Anfügen eines CANopen Geräts Es stehen hier alle Beckhoff CAN-Knoten zur Verfügung sowie ein allgemeiner CANopen-Node für CANopen-Geräte anderer Hersteller. Abb. 56: Auswahl eines CANopen-Knotens Verknüpfen Sie nun die PLC Variablen mit Ihren CAN-Knoten. Nach erfolgreicher Konfiguration laden Sie diese in den BX.
-
Seite 57: Sdo-Kommunikation Aus Der Plc
IDXOFFS SDO Subindex Länge der SDO Daten (1...4) Download BX (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207257611.zip) Setzen einzelner oder aller Knoten in den Pre-Operational oder Operational Zustand Mit dem ADSWRTCTL Baustein können Sie einzelne CANopen Knoten oder alle Slaves in den Pre- Operational oder Operational Zustand versetzen. -
Seite 58: Emergency-Telegramme Und Diagnose
Parametrierung und Inbetriebnahme Download BX (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207259787.zip) SSB Interface neu Starten Mit dem ADSWRTCTL Baustein kann der SSB gestoppt und neu gestartet werden. Führen Sie als erstes ein Stopp aus und als nächstes einen Start aus. Eingangsparameter Beschreibung NETID lokale NetId des BX oder leer lassen zum Beispiel mit ''... - Seite 59 Auslesen der Emergency Telegramme mit AdsRead Eingangsparameter Beschreibung NETID lokale NetId des BX Port Nummer IDXGRP 16#xxxxF180 (xxxx) NodeId, das Diag Flag wird nur beim Auslesen von mindesten 106 Byte zurückgesetzt 16#xxxxF181 (xxxx) NodeId, das Diag Flag wird sofort zurückgesetzt IDXOFFS Byte Offset BX5100 Version: 2.2.0...
- Seite 60 Wert (falls Offset 6 = 1) 24 - 25 Anzahl der folgenden Emergencies 26 - n Emergencies (jeweils 8 Byte) Download BX (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207261963.zip) Download Beispiel System-Manager File BX (https://infosys.beckhoff.com/content/1031/bx5100/ Resources/zip/3207264139.zip) Auslesen der Anzahl der PDO Telegramme mit AdsRead Eingangsparameter Beschreibung NETID...
-
Seite 61: Konfiguration Der Node-Id Erforderlich
Beispiele 4.2.10.6.1 BK5120 am SSB Notwendiges Material: • TwinCAT 2.9 Build 953 oder Größer • BX3100 Version 0.80 oder Größer, BX5100 Version 0.13, BX8000 Version 0.04 • 1 x KL1xx4 • 1 x KL2xx4 • 1 x KL9010 • 1 x BK5120 •... -
Seite 62: Kommunikation Von Bx-Controller Zu Bx-Controller (Über Ssb)
(Das System Manager File muss per ADS auf den BX-Controller geladen werden). • BX-Programm File (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207270667.zip) Für den Konfigurations-Download über ADS benötigt man entweder einen BECKHOFF Feldbus-Master oder eine freie serielle Schnittstelle. 4.2.10.6.2 Kommunikation von BX-Controller zu BX-Controller (über SSB) Über den SSB können 2 oder mehrere BX-Controller untereinander Daten austauschen. - Seite 63 • TwinCAT System Manager File BX_TWO (https://infosys.beckhoff.com/content/1031/bx5100/ Resources/zip/3207277195.zip) • Programm File BX_ONE (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207279371.zip) Für den Konfigurations-Download über ADS benötigt man entweder einen BECKHOFF Master (FC310x, FC510x, FC520x) oder eine freie serielle Schnittstelle. 4.2.10.6.3 AX2000 am SSB Abb. 60: AX2000 Notwendiges Material: •...
- Seite 64 (Das System Manager File muss per ADS zum BX-Controller geladen werden). ◦ BX-Programm-File (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207283723.zip) Für den Konfigurations-Download über ADS benötigt man entweder einen BECKHOFF Feldbus-Master oder eine freie serielle Schnittstelle. AX2000 Beschreibung Folgende Abschnitte sind Auszüge aus der Dokumentation des AX2000 Drive Handbuch. Weitere Informationen finden Sie unter der Internet Adresse http://www.Beckhoff.de.
-
Seite 65: Cimrex-Panel Am Ssb Des Bx-Controllers
• Einige Busklemmen für den K-Bus (hier 3 x KL2114, kann aber in der System-Manager-Datei angepasst werden) • 1 x Cimrex 41 • 1 x CAB 15 CAN Adapter • Beispielprogramm in ST für den BX: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207285899.zip) • Beispielkonfiguration für den BX: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207288075.zip) BX5100 Version: 2.2.0... -
Seite 66: Icla-Drive Am Ssb
• 1 x IclA D065 Folgende Einstellungen Slave Adresse 10, Baudrate 500 kByte (Achtung: Dies sind nicht die Default Parameter des Antriebs) • Verkabelungsmaterial sowie Spannungsversorgung Für den Konfigurations-Download über ADS benötigt man entweder einen BECKHOFF Feldbus-Master oder eine freie serielle Schnittstelle. Umkonfigurierungsbeispiel für TwinCAT mit der CANopen-Masterkarte FC510x Um den Antrieb umzustellen, kann dies mit folgendem Beispiel erfolgen. - Seite 67 Parametrierung und Inbetriebnahme Beispiel Programm und Konfiguration auf dem BX-Controller • TwinCAT-System-Manager-File (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207296779.zip) (Das System-Manager-File muss per ADS zum BX-Controller geladen werden). • BX-Programm-File (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207298955.zip) IclA D065 - Beschreibung Folgende Abschnitte sind Auszüge aus der Dokumentation des IclA-Drive-Handbuchs. Diese wurden uns von der Firma SIG Positec Automation GmbH für die Beschreibung der grundliegenden Parameter zur...
- Seite 68 • Stoppen des Positionierantriebs aus einem laufenden Fahrbetrieb. Zum Anhalten wird das Bit 8 „Halt" benutzt Einzelheiten finden Sie unter den Schlagworten „Betriebsart, starten" und „Betriebsart, überwachen". Objektbeschreibung Wertebeschreibung Index 6040h Objektname Control-Wort Datentyp Integned16 Subindex 00h, Control-Wort Zugriff read-write PDO-Mapping R_PDO Version: 2.2.0 BX5100...
- Seite 69 „Manuellbetrieb" und „Positionierbetrieb". Die Bits zur Statusüberwachung des Geräts sind im Kapitel „Diagnose und Fehlerbehebung" beschrieben. Das Steuerungswort ist in den ersten beiden Byte der R_PDOs abgebildet. Objektbeschreibung Wertebeschreibung Index 6041h Objektname Status-Wort Datentyp Unsigned16 Subindex 00h, Status-Wort Zugriff read-only PDO-Mapping T_PDO BX5100 Version: 2.2.0...
- Seite 70 Positionswerte für die obere und untere Bereichsgrenze eingetragen werden. • Grenzen des Arbeitsbereichs in software position limit (607D • Grenzen des Fahrbereichs in software position drive limit (2009 • Grenzen des Sicherheitsbereichs in software position safety limit (2008 Version: 2.2.0 BX5100...
- Seite 71 Parametrierung und Inbetriebnahme Bespiel für eine Referenzierung Das folgende Listing zeigt die Eingabe der Referenzierungswerte. Die Knotenadresse des Positionierantriebs ist auf 01 eingestellt. Abb. 68: Listing der Referenzierungswerte BX5100 Version: 2.2.0...
-
Seite 72: Lenze Frequenzumrichter Am Ssb
• 1 x Lenze 8200 vector + Motor • 1 x Lenze CANopen Interface 2175 • Verkabelungsmaterial sowie Spannungsversorgung Für den Konfigurations-Download über ADS benötigen Sie eine BECKHOFF Feldbus-Masterkarte oder eine freie serielle Schnittstelle. Lenze Beschreibung Folgende Abschnitte sind Auszüge aus der Dokumentation des Lenze 2175-Handbuchs. Diese wurden uns von der Firma Lenze Drive Systems GmbH für die Beschreibung der grundlegenden Parameter zur... -
Seite 73: Wertigkeit Der Dip-Schalter
DIP Schalter 6 hat die kleinste Wertigkeit. Beispiel: Adresse 3 Schalter 5 und 6 auf "ON". Freigabe des Kommunikationsmoduls Um das Kommunikationsmodul freizuschalten muss die Bedienungsart auf 3 gestellt werden. Dies kann über den SSB erfolgen mit folgendem Eintrag: BX5100 Version: 2.2.0... - Seite 74 In der Default-Einstellung sendet der Lenze-Drive seine Ausgangs-PDOs nur, nachdem er vom CAN-Master ein Sync-Telegramm empfangen hat. Wenn Sie den Trans. Type zum Beispiel auf 2 stellen, sendet der Lenze-Drive nach jedem 2. empfangenen Sync-Telegramm ein Ausgangs-PDO. Beispiel Projekt • TwinCAT-System-Manager-File: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207301131.zip) • TwinCAT-PLC-File: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207303307.zip) Version: 2.2.0...
-
Seite 75: Echtzeit-Uhr (Rtc)
Lesen der RTC auf dem BX-Controller (siehe Beispiel [} 112] Programmierung\Bibliothek) Die RTC kann per Funktionsbaustein ausgelesen werden. Notwendige Bibliotheken: • TcSystemBX.lbx • TCBaseBX.lbx Schreiben der RTC auf dem BX-Controller Die RTC kann per Funktionsbaustein eingestellt werden. Notwendige Bibliotheken: • TcSystemBX.lbx • TCBaseBX.lbx BX5100 Version: 2.2.0... -
Seite 76: Com-Port
115200 Baud (nur COM 2) Datenbits 8 (Default) Parity NONE EVEN (Default) Stoppbits 1 (Default) COM 1 Die Schnittstelle COM 1 für die Kommunikation mit der KS2000 Software oder dem TwinCAT PLC Control (einloggen über die serielle Schnittstelle). Version: 2.2.0 BX5100... -
Seite 77: Menü
Bevor Einstellungen geändert werden können, muss Passwort gesetzt werden. Das Passwort bleibt auch beim Firmware-Update oder beim zurücksetzen auf die Herstellerkonfiguration gespeichert. Sollten Sie das Passwort vergessen haben, so müssen Sie den BX-Controller einschicken. Abb. 74: Navigationsschalter der BX-Controller BX5100 Version: 2.2.0... - Seite 78 Parametrierung und Inbetriebnahme Schalterbelegung Abb. 75: Schalterbelegung Version: 2.2.0 BX5100...
- Seite 79 Anzahl der >aktueller Wert< read only Busklemmen Busspezifische Menü Punkte BX3100 F-Bus Adresse* >aktueller Wert< 1-126 PROFIBUS Baudrate* >aktueller Wert< read only read only Status >aktueller Wert< read only Diagnose* >aktueller Wert< read only BX5100 Version: 2.2.0...
- Seite 80 Parametrierung und Inbetriebnahme BX5100 F-Bus Adresse* >aktueller Wert< 1-126 CANopen Baudrate* >aktueller Wert< read only read only Status >aktueller Wert< read only Diagnose* >aktueller Wert< read only *) in Vorbereitung BX9000 Ethernet MAC ID >aktueller Wert< 000105-xx-xx-xx, read only ADDR.STATE >aktueller Wert<...
-
Seite 81: Erstellen Eigener Menüs
Man kann den das Display und Navigations-Schalter auch für eigene Zwecke gebrauchen, z. B. um Diagnoseinformationen anzuzeigen und oder Parameter zu verändern. Für den einfachen Einstieg ist ein Beispiel angefügt, das Sie für Ihre ersten Schritte verwenden und anpassen können. Download (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207305483.zip) BX5100 Version: 2.2.0... -
Seite 82: Konfigurations-Software Ks2000
• Der BX-Controller muss im FreeRun Modus sein. Aktivieren Sie dies mit dem TwinCAT System Manager. Nun können Sie sich mit der Konfigurations-Software KS2000 über ADS (Port 100) oder das serielle Kabel einloggen und die KS2000-Dialoge der Busklemmen nutzen. Version: 2.2.0 BX5100... -
Seite 83: Programmierung
POUs Beschränkung durch Speicher TwinCAT PLC Das Beckhoff TwinCAT Software-System verwandelt jeden kompatiblen PC in eine Echtzeitsteuerung mit Multi-SPS-System, NC-Achsregelung, Programmierumgebung und Bedienstation. Die Programmierumgebung von TwinCAT wird auch für die Programmierung der BC/BX genutzt. Wenn Sie TwinCAT PLC (Windows NT4/2000/XP) installiert haben, können Sie die Feldbus-Verbindung oder die serielle Schnittstelle für Software-Download und Debugging verwenden. -
Seite 84: Twincat Plc - Fehler-Codes
Abb. 76: Maximale Anzahl der POUs überschritten Wenn man Bibliotheken einbindet, kann dieser Wert nicht mehr ausreichen. Erhöhen Sie dann die Anzahl an POUs. Öffnen Sie dazu im PLC Control unter Projekte/Optionen... Abb. 77: Menüpfad Projekte / Optionen / Controller Settimgs ...die Controller Settings. Version: 2.2.0 BX5100... - Seite 85 Abb. 79: Globaler Speicher nicht ausreichend Per Default sind 2 x 16 kByte Daten angelegt. Wenn viele Daten benutzt werden sollen, müssen Sie diesen Bereich vergrößern. Beim BX sind maximal 14 Datensegmente möglich. Abb. 80: Menüpfad Projekte / Optionen / Build BX5100 Version: 2.2.0...
- Seite 86 Alle Daten die im Bereich %MB1000 - %MB1009 sind dann persistent. Es spielt keine Rolle um welchen Variablen Typ es sich handelt. Die Daten werden wie bei den Retain Daten in NOVRAM kopiert und sind daher in jedem Zyklus beschreibbar. Version: 2.2.0 BX5100...
-
Seite 87: Remanente Daten
Das aktivieren der Herstellereinstellung löscht dies wieder und auch die persistenten Daten werden gelöscht. Beispielprogramm Klicken Sie auf den Link (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207307659.zip) um ein Beispielprogramm aus dieser Dokumentation herunterzuladen. Remanente Daten Auf dem BX-Controller stehen 2000 Byte an remanenten Daten zur Verfügung. Diese Daten werden im PLC Control als VAR RETAIN deklariert. -
Seite 88: Lokierte Variablen Sind Keine Remanenten Daten
Die Port Nummer ist 800 für die PLC. Index Group Bedeutung Index Offset (Wertebereich) 0x4020 Merker (nur BXxxx0) 0..4096 Beispiel BX Programm Flag_01 AT %MB0: WORD; END_VAR TwinCAT PC/CX Master Programm fbADRSREAD: ADSREAD; Flag_M: WORD; END_VAR fbADRSREAD( NETID:='172.16.3.0.2.3' , (* AMSNetId BX *) PORT:=800 , (* 800 - PLC *) IDXGRP:=16#4020 , (* 0x4020hex falgs *) IDXOFFS:=0 , (* byte offset *) LEN:=2 , (* Lenght byte *) DESTADDR:=ADR(Merker) , READ:=TRUE , TMOUT:=t#1s ); IF NOT fbADRSREAD.BUSY THEN fbADRSREAD(READ:=FALSE); END_IF Version: 2.2.0 BX5100... -
Seite 89: Lokales Prozessabbild Im Auslieferungszustand
Busklemmen, die zu einem Byte aufgefüllt werden. Das Default-Mapping der komplexen Busklemmen ist: • komplette Auswertung • Intel-Format • Wordalignment Beispiel Busklemmen Controller: 1 x BX5100 Position 1: 1 x KL1012 Position 2: 1 x KL1104 Position 3: 1 x KL2012 Position 4: 1 x KL2034... -
Seite 90: Adresse Der Busklemmen In Der Lokalen Sps
SPS (BCxx00) zugeordnet haben. Mapping der Busklemmen Die genaue Belegung der byteorientierten Busklemmen entnehmen Sie bitte der Konfigurations-Anleitung zur jeweiligen Busklemme. Diese Dokumentation finden Sie auf der Beckhoff CD Products & Solutions oder im Internet unter http://www.beckhoff.de. byteorientierte Busklemmen bitorientierte Busklemmen... -
Seite 91: Erzeugen Eines Boot-Projekts
Bei den Busklemmen-Controllern der BX-Serie kann beim Booten das Starten des Boot-Projekts durch Drücken des Navi-Schalters verhindert werden. Das Boot-Projekt ist damit nicht gelöscht und wird beim erneuten Booten des Busklemmen-Controller wieder gestartet. * ab Version 0.85 BX5100 Version: 2.2.0... -
Seite 92: Lokales Prozessabbild In Der Twincat-Konfiguration
Adressbereich. Mit der TwinCAT-Konfiguration hat man die Möglichkeit, seine lokierten Variablen, frei mit einer Busklemme zu verknüpfen. Man parametriert dies im System Manager und lädt dann diese erstellte Konfiguration auf den Busklemmen-Controller herunter (siehe TwinCAT-Konfiguration [} 35]). Ein Hochladen einer bestehenden TwinCAT-Konfiguration ist auch möglich. Version: 2.2.0 BX5100... -
Seite 93: Kommunikation Zwischen Twincat Und Bx/Bcxx50
In einer gemischten Datenstruktur sollten keine Real-Werte enthalten sein. Wenn dies doch der Fall ist, muss zusätzlich im BX/BCxx50 oder im TwinCAT-Masterprojekt das High und Low Word ver- tauscht werden. Verwenden Sie besser ein Array von Real-Werten oder übertragen Sie die Real- Werte einzeln. BX5100 Version: 2.2.0... -
Seite 94: Größere Feldbusdatenblöcke
Quell-Code ohne Task-Konfiguration und die Bibliotheken ablegen. Dies benötigt wesentlich weniger Speicherplatz! Allgemeine Einstellungen Unter Bearbeiten/Optionen kann eingestellt werden wann der Quell-Code zum Zielsystem heruntergeladen werden soll. Öffnen Sie das Optionsmenü. Abb. 84: Öffnen des Optionsmenüs Wählen Sie nun den Source Download an. Version: 2.2.0 BX5100... - Seite 95 Welche Option Sie verwenden können hängt von der Größe Ihrer Projekte ab. Download eines Programms Der Quell-Code kann man auf Anforderung zum Zielsystem übertragen. Dafür muss man mit seinem Programm eingeloggt sein. Unter Online/Quell-Code Download kann jetzt der Programm-Code zum Busklemmen-Controller übertragen werden. BX5100 Version: 2.2.0...
- Seite 96 Nach einer kurzen Zeit öffnet sich ein Fenster, das den Vorschritt des Downloads anzeigt. Abb. 87: Vorschritt des Downloads Upload eines Programms Um den Programm-Code wieder hoch zu laden, öffnen Sie im PLC Control ein neues File. Als nächstes klicken Sie auf die Schaltfläche PLC. Version: 2.2.0 BX5100...
- Seite 97 • BCxx50 or BX via serial, wenn sie über die serielle Schnittstelle mit dem Busklemmen-Controller verbunden sind. Abb. 89: Auswahl des Datenübertragungswegs Als nächsten Schritt wählen Sie das Gerät aus und bestätigen Sie mit OK. Abb. 90: Auswahl des Gerätes BX5100 Version: 2.2.0...
-
Seite 98: Bibliotheken - Übersicht
5.13.1 Bibliotheken - Übersicht Für die Busklemmen Controller (Buskoppler mit SPS-Funktionalität, Bezeichnung BXxxxx) gibt es verschiedene Bibliotheken (siehe Beckhoff Information System). Download Zum Download der Bibliotheken bitte auf den Link mit der linken Maustaste klicken. Bitte die Bibliotheken in das Verzeichnis TwinCAT\PLC\LIB kopieren. - Seite 99 Programmierung Bit Functions Version Firmware BX3100 BX5100 BX5200 BX8000 BX9000 CLEARBIT32 07.03.03 0.28 0.01 1.00 0.01 1.00 CSETBIT32 07.03.03 0.28 0.01 1.00 0.01 1.00 GETBIT32 07.03.03 0.28 0.01 1.00 0.01 1.00 SETBIT32 07.03.03 0.28 0.01 1.00 0.01 1.00 Display Function Version...
- Seite 100 Programmierung NOVRAM Functi- Version Firmware BX3100 BX5100 BX5200 BX8000 BX9000 Serial Communi- Version Firmware cation Interface BX3100 BX5100 BX5200 BX8000 BX9000 FB_COMPortClose 14.07.03 0.49 0.01 1.00 0.01 1.00 FB_COMPortOpen 14.07.03 0.49 0.01 1.00 0.01 1.00 F_COMPortRead 14.07.03 0.49 0.01 1.00 0.01...
-
Seite 101: System Info
Variable Systeminfo. Der Typ SYSTEMINFOTYPE [} 101] ist in der System-Bibliothek deklariert. Um auf die Variable zugreifen zu können muss die System-Bibliothek in das Projekt eingebunden werden. Entwicklungsumgebung Zielplattform Einzubindende SPS Bibliotheken TwinCAT v2.9.0 BX Controller TcBaseBX.lbx 5.13.2.4 System Info Type TYPE SYSTEMINFOTYPE STRUCT runTimeNo : BYTE; projectName : STRING(32); BX5100 Version: 2.2.0... -
Seite 102: Lokale Ads-Port Nummern - Übersicht
Ausgänge verwendet werden, die im Fehlerfall ausgeschaltet werden müssen. Index Group Bedeutung Index Offset (Wertebereich) 0xF020 Input - Eingänge 0...2047 0xF021 Input - Eingänge Bit 0...16376 0xF030 Output - Ausgänge 0...2047 0xF031 Output - Ausgänge Bit 0...16376 0x4020 Merker 0...4095 0x4021 Merker Bit 0...32760 Version: 2.2.0 BX5100... -
Seite 103: Passwort Setzen
Beachten Sie beim Lesen der Register, dass der Time-Out beim ADS-Baustein auf eine Zeit größer eine Sekunde eingestellt wird. Passwort setzen Beachten Sie beim Schreiben auf die Register, dass das Passwort gesetzt wird (siehe Dokumenta- tion zur entsprechenden Busklemme). BX5100 Version: 2.2.0... -
Seite 104: Deaktivieren Der Led Für Zykluszeit-Überschreitung
Funktionsbausteine Name Beschreibung Eine serielle Verbindung zu einem Partner öffnen. FB_ComPortOpen [} 106] Eine serielle Verbindung zu einem Partner schließen. FB_ComPortClose [} 106] Funktionen Name Beschreibung Daten aus dem COM-Puffer lesen F_ComPortRead [} 105] Daten in COM-Puffer schreiben F_ComPortWrite [} 105] Version: 2.2.0 BX5100... - Seite 105 Maximale Länge der Daten, die gelesen werden können. pRxBuffer: Pointer auf die Daten, die mit dem COM Puffer Inhalt geschrieben werden sollen. Rückgabewert Bedeutung > 0 Anzahl der Bytes, die vom COM Puffer in die PLC kopiert wurden 0x8000 Speicherüberlauf BX5100 Version: 2.2.0...
- Seite 106 Anzahl der Bytes, die vom der PLC in den COM Puffer kopiert wurden 0x8000 Speicherüberlauf 5.13.2.6.3 COM Port - Funktionsbaustein COM Port Open Abb. 93: Funktionsbaustein FB_COMPORTOPEN FUNCTION_BLOCK FB_COMPORTOPEN VAR_INPUT bOpen :BOOL; stComConfig :ST_COMCONFIG; Legende bOpen: Positive Flanke startet den Baustein stComConfig [} 108]: Datenstruktur COM Schnittstelle. Version: 2.2.0 BX5100...
- Seite 107 FUNCTION_BLOCK FB_COMPORTCLOSE VAR_INPUT bOpen :BOOL; iHandle :WORD; Legende bClose: Positive Flanke startet den Baustein iHandle: Pointerübergabe von FB_COMPORTOPEN. VAR_OUTPUT bBusy :BOOL; bErr :BOOL; iErrId :WORD; Legende bBusy: So lange der Baustein TRUE ist der Baustein aktiv. bErr: Fehler Bit. iErrId: Fehler Nummer. BX5100 Version: 2.2.0...
- Seite 108 Bedeutung (ist aus kompatibilitäts- Gründen beibehalten worden) dwMode: Daten Mode COM 1 nur "0" - COM 2 RS232 "0" und RS485 "1" BaudRate: Baudrate eCommPort: Com Port COM1/COM2 eDataBits: Anzahl der Datenbits SEVEN_DATABITS/EIGHT_DATABITS eParity: EVEN/ODD/NONE eStoppBits: Anzahl der Stoppbits ONE_STOPPBIT/TWO_STOPPBITS Version: 2.2.0 BX5100...
- Seite 109 Programmierung 5.13.2.6.5 Beispiel Beispiel Programm in ST Download (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207320715.zip) PROGRAM MAIN (* EXAMPLE - BRIDGE between PIN 7 and 8 from X01 COM 2 Port*) fb_COMPortOpen_1 : FB_COMPortOpen; stCOMConfig_1 : ST_COMConfig; hCOM : WORD; Result_R : INT; Result_W : INT; Var_M : ARRAY[0..9] OF BYTE:=11,22,0,33,0(6); Var_R : ARRAY[0..9] OF BYTE; Value : INT; Counter_V : BYTE; (* It is all OK, this value counts up *) i : INT; i_k : INT; fbTimer : TON; END_VAR stCOMConfig_1.cbRxBufferLen :=300; stCOMConfig_1.cbTxBufferLen :=300; stCOMConfig_1.dwMode :=0; stCOMConfig_1.BaudRate :=19200; stCOMConfig_1.eCommPort :=COM2; stCOMConfig_1.eDataBits:=EIGHT_DATABITS; stCOMConfig_1.eParity:=EVEN; stCOMConfig_1.eStoppBits:=ONE_STOPPBIT; CASE i OF (* Open Port *) 0: fb_COMPortOpen_1(bOpen:=TRUE , stCOMConfig:=stCOMConfig_1); IF NOT fb_COMPortOpen_1.bBusy THEN IF NOTfb_COMPortOpen_1.bError THEN hCOM:=fb_COMPortOpen_1.iHandle ; i:=i+1; ELSE ...
-
Seite 110: Bx Debug-Funktion
Mit dieser Funktion wird der Timer-Wert gelesen. Der Rückgabewert muss mit 5.12 µs multipliziert werden. Beispiel Timer_BX :WORD; i :INT; END_VAR Programm F_STARTDEBUGTIMER(); For i:=0 to 1000 do ; END_FOR Timer_BX:=F_READDEBUGTIMER(); 5.13.2.8 Navigations-Schalter 5.13.2.8.1 FUN GetNavSwitch Dieser Funktionsbaustein ermöglicht es Ihnen das Auslesen des Navigationsschalters. Abb. 97: Funktionsbaustein F_GETNAVSWITCH VAR_Output F_GETNAVSWITCH :WORD; Version: 2.2.0 BX5100... - Seite 111 Programm sichtbar ist. Bitte berücksichtigen Sie das in Ihrer Anwendung. Werten Sie zum Beispiel den Schalter erst einer kurzen warte Zeit aus, in dem Sie mit der fallenden Flanke von Bit 15 einen Timer starten. Download Beispiel Programm in ST https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207322891.zip 5.13.2.9...
-
Seite 112: Echtzeit-Uhr - Beispiel
Programmierung iErrId: Fehler Nummer. Rückgabeparameter Bedeutung kein Fehler > 0 Fehler Nummer Beispiel Programm in ST Download https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207325067.zip PROGRAM MAIN fb_DispWrite1: FB_DispWrite; i: INT; udiCounter: UDINT; strCounter: STRING; strLine: STRING; k: INT; END_VAR CASE i OF 0: strCounter:=CONCAT('Counter :',UDINT_TO_STRING(udiCounter)); fb_DispWrite1(bWrite:=TRUE , nRow:=1 ,sData:=strCounter ); IF NOT fb_DispWrite1.bBusy THEN IF NOTfb_DispWrite1.bErr THEN fb_DispWrite1(bWrite:=FALSE); udiCounter:=udiCounter+1; i:=1; END_IF END_IF 1: fb_DispWrite1(bWrite:=TRUE , nRow:=2 , sData:=strLine); IF NOT fb_DispWrite1.bBusy THEN IF NOTfb_DispWrite1.bErr THEN fb_DispWrite1(bWrite:=FALSE);... -
Seite 113: Rtc-Baustein Nicht In Jedem Sps-Zyklus Aufrufen
EN: Positive Flanke setzt die Uhrzeit auf den Wert der an den PDT-Eingang anliegt. PDT: Datum und Uhrzeit die eingestellt werden sollen. VAR_OUTPUT Q :BOOL; CDT :BOOL; Legende CDT: Aktuelle Uhrzeit. Notwendige Bibliotheken: • TcSystemBX.lb6 • TcBaseBX.lb6 Download Beispiel Programm in ST (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207329419.zip) PROGRAM MAIN fbTimer: TON; fbRTC: RTC; END_VAR fbTimer(PT:=t#60s,IN:=NOT fbTimer.Q); IF fbTimer.Q THEN fbRTC; END_IF RTC-Baustein nicht in jedem SPS-Zyklus aufrufen Der Aufruf des RTC-Bausteins erhöht die Zykluszeit um ca. -
Seite 114: Laden Und Speichern Von Rezepturen
Eine positive Flanke stößt das Schreiben des Bausteins an (bRead muss FALSE sein) OffsetRead: Offset im Speicher max.16.000 Byte DataReadSize: Größe der Daten in Byte, die gelesen werden sollen (max. 16.000 Byte) DataRead: Pointer per ADR auf die Daten zeigen Version: 2.2.0 BX5100... -
Seite 115: Tccomportbx - Übersicht
WRITE: Daten-Offset und Daten-Länge über 16.000 Byte 0x31440708 CRC-Fehler im Datenspeicher 0x31470708 Das Schreiben der Daten ist noch nicht abgeschlossen Notwendige Bibliotheken: • TcSystemBX.lb6 • TcBaseBX.lb6 Download Beispiel Programm in ST (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207331595.zip) 5.13.4 TcComPortBX 5.13.4.1 TcComPortBX - Übersicht Erforderliche Bibliotheken: • TcBaseBX • TcSystemBX Überblick... - Seite 116 SIZEOF und der Variable, die mit ptDataIN verbunden ist, angeschlossen ptDataOut: wird mit ADR und den Daten Out verbunden ptDataIn: wird mit ADR und den Daten In verbunden bStart: positive Flanke startet den Baustein TMOut: Wartezeit bis abgebrochen wird VAR_OUTPUT bBusy :BOOL; bError :BOOL; iErrorId :WORD; Input_len :WORD; Version: 2.2.0 BX5100...
- Seite 117 Einstellungen im FB: Wichtig ist das bei der Nutzung der RS485-Verbindung die Variable stCOMConfig:=1 ist und die COM2-Schnittstelle angewählt ist. BX COM2 RS485 BK8000 Beispiel Programm in ST Download (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207333771.zip) Notwendiges Material: • BX3100 + Busklemme • BK8100, KL1xx8, KL2xx8, KL9010 • Serielles Kabel, PIN Belegung: siehe im Beispielprogramm 5.13.4.3...
- Seite 118 Watchdog Fehler wenn diese größer 0 ms ist (WD disable wenn 0 ms) Fehler beim Öffnen des COM Ports Fehler beim Senden der Daten Interner Recive Buffer übergelaufen Daten passen nicht in den PLC Buffer (größer 500 Byte) Daten können nicht in den PLC Buffer kopiert werden CRC - Fehler Version: 2.2.0 BX5100...
- Seite 119 6 - 7 Brücken Beispiel Programm für den BXxxx in Strukturiertem Text Download (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207335947.zip) System Manager File für TwinCAT als Master. Wie man im Bild sieht, wird ein Buskoppler mit Busklemmen projektiert. Die Art und Anzahl der Busklemmen gibt dann die Datenlänge an. Welche Busklemmen das sind spielt im Prinzip keine Rolle.
- Seite 120 Legende pstrEmo_IN: Pointer auf die KL6inData5B pstrEmo_OUT: Pointer auf die KL6outData5B ComConfig [} 108]: Parametrierung der COM Schnittstelle Download Beispielprogramm in ST für die Verknüpfung COMLib zum BX: (https://infosys.beckhoff.com/ content/1031/bx5100/Resources/zip/3207338123.zip) 5.13.4.5 FB_BX_COM_64 Dieser Baustein verbindet die ModbusRTU.lib oder ComLib.lib mit der seriellen Schnittstelle des BX- Controllers.
- Seite 121 Programmierung Download Beispielprogramm in ST für die Verknüpfung ModbusRTU zum BX: (https:// infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207340299.zip) Download Beispielprogramm in ST für die Verknüpfung ModbusRTU Version 2 zum BX: (https:// infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207342475.zip) Für das Beispiel ist die ModbusRTU-Bibliothek notwendig! 5.13.4.6 FB_BX_COM_64ex Dieser Baustein verbindet die ModbusRTU.lib oder ComLib.lib mit der seriellen Schnittstelle des BX- Controllers.
-
Seite 122: Weitere Beispiele
Die Reaktionszeiten sind abhängig von der eingestellten Task-Zeit, die Anzahl an Slaves, die Länge der Modbus-Telegramme und der Antwortzeit der Slaves. Für die Ermittlung folgender Tabelle wurden Beckhoff BK7300 Modbus Slaves verwendet. Da dies nicht auf jeden Slave übertragbar ist, sollte diese Tabelle nur als Richtwert verwendet werden. - Seite 123 • TcComPortBX.lbx • Standard.lbx • TcBase.lbx • TcSystemBX.lbx Download Beispielprogramm BX: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207351179.zip) 5.13.4.7.3 BX COM-Port - Cimrex-Panel Die serielle Schnittstelle des BX-Controllers kann auch als Modbus-Slave benutzt werden. In diesem Beispiel wird ein Panel der Firma Beijers angeschlossen. Weitere Informationen zu dem Panel finden Sie unter http://www.beijerelectronics.de.
- Seite 124 2 -3 15 -16 *) aktiver Abschlusswiderstand ist bei kurzen Leitungslängen (≤ 5 m) und kleinen Baudraten (≤19200 Baud) nicht erforderlich Download Beispielprogramm in ST für den BX: (https://infosys.beckhoff.com/content/1031/bx5100/ Resources/zip/3207340299.zip) Download Beispiel mit Cimrex-Panel: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207353355.zip) Für das Beispiel sind die Bibliotheken ModbusRTU, TcComPortBC und TcBaseBX erforderlich.
- Seite 125 5.13.4.7.4 BX COM-Port - RK512-Protokoll Über die Schnittstelle COM1 oder COM2 des BX-Controllers kann das RK512-Protokoll Daten mit einer Gegenstelle austauschen. Dokumentation zum RK512-Baustein finden Sie im Beckhoff Information System. Über die 64 Byte Emulation des BX-Controllers wird die serielle Schnittstelle des PC simuliert.
-
Seite 126: Bx Com-Port - Sms Über Mobiltelefon
Die serielle Schnittstelle kann auch dafür verwendet werden, vom BX-Controller aus eine SMS zu versenden. Das folgende Beispiel benutzt die SMS-Bibliothek mit einem Siemens S35 Mobiltelefon. Abb. 108: Mobiltelefon am COM-Port des BX-Controllers Download: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3207362059.zip) Pinbelegung (Siemens-Kabel S30880-S4501 A801-2) COM 1 COM 2 5.13.5... - Seite 127 KL6904 gesendet werden [} 127] Auswertung der TwinSAFE Daten, welche von einer KL6904 zu einer FB_TwinSAFE_KLx904_output KL1904 oder KL2904 gesendet werden [} 130] Download der TwinSAFE-Bibliothek: (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3207364235.zip) 5.13.5.2 FUNCTION F_GetVersionTcTwinSAFE Abb. 109: Funktionsbaustein F_GETVERSIONTCTWINSAFE Mit dieser Funktion können Versionsinformationen der SPS-Bibliothek ausgelesen werden.
- Seite 128 PROGRAM MAIN fbTwinSAFE_KLx904_input : FB_TwinSAFE_KLx904_input; bInput1_KL1904_S_Address_113 : BOOL; bInput2_KL1904_S_Address_113 : BOOL; bInput3_KL1904_S_Address_113 : BOOL; bInput4_KL1904_S_Address_113 : BOOL; tCycleTime_KL1904_KL6904 : TIME; bConnection3_In_Run : BOOL; END_VAR Abb. 111: Funktionsbaustein FB_TWINSAFE_KLX904_input Im Beispiel werden die Werte der KL1904 Eingangsdaten auf die angeschlossenen Variablen geschrieben. Ist der Ausgang bConnectionInRun FALSE werden die Ausgänge generell auf FALSE gesetzt. Version: 2.2.0 BX5100...
- Seite 129 Programmierung Zum Verknüpfen der Eingangsdaten markieren Sie den Parameter KLx904_SafetyIn und wählen aus dem Kontext Menü "Verknüpfung ändern..." Abb. 112: Verknüpfen der Eingangsdaten und wählen im folgenden Dialog die entsprechende SafetyIn-Variable Abb. 113: Auswahl der SafetyIn-Variable BX5100 Version: 2.2.0...
- Seite 130 Wert grundsätzlich 0. tCycleTime: Liefert die Zykluszeit in ms, die benötigt wird um das TwinSAFE Telegramm zwischen den Teilnehmern auszutauschen. bConnectionInRun: Liefert ein TRUE wenn kein Fehler in der Verbindung von der KL6904 zur KLx904 ansteht. Version: 2.2.0 BX5100...
- Seite 131 Verbindung werden die Ausgangssignale zur KL2904 geschrieben und vom Baustein auf die angeschlossenen Variablen kopiert. Ist der Ausgang bConnectionInRun auf FALSE werden die Ausgänge auf FALSE gesetzt. Zum Verknüpfen der Eingangsdaten markieren Sie den Parameter KL6904_SafetyQBx und wählen aus dem Kontext Menü "Verknüpfung ändern..." BX5100 Version: 2.2.0...
- Seite 132 Programmierung Abb. 117: Verknüpfen der Eingangsdaten und wählen im folgenden Dialog die entsprechende SafetyQBx-Variable Abb. 118: Auswahl der entsprechenden SafetyQBx-Variable Version: 2.2.0 BX5100...
-
Seite 133: Programmübertragung
Unter Online/Kommunikationsparameter finden Sie im PLC Control die Einstellungen zur seriellen Schnittstelle, Portnummer, Baud-Rate usw. Der Busklemmen Controller benötigt folgende Einstellung: • Baud-Rate: 9600/19200/38400/57600 Baud (automatische Baudratenerkennung) • Stop Bits: 1 • Parity: Gerade Abb. 120: Parametrierung der seriellen Schnittstelle BX5100 Version: 2.2.0... - Seite 134 Busklemmen-Controller dem TwinCAT bekannt gemacht werden (siehe serielles ADS [} 44]). Wählen Sie im TwinCAT PLC-Control die ADS-Verbindung an. Abb. 121: Auswahl des Datenübertragungswegs - AMS Im PLC Control kann man sich unter Online/Communication Parameters... einwählen. Abb. 122: Auswahl des Gerätes Version: 2.2.0 BX5100...
-
Seite 135: Programmierung Über Canopen
Sichern Sie die Einstellungen und aktivieren Sie die Konfiguration. Danach starten Sie das TwinCAT System und die zyklische Task. TwinCAT System Manager Abb. 123: Darstellung des BX5100 im TwinCAT System Manager PLC Control Beim Neustart des TwinCAT PLC Control fragt TwinCAT nach der Zielplattform, d.h. auf welchem Gerät später das Anwender-Programm laufen soll. - Seite 136 Wählen Sie nach Erstellung Ihres Programms unter der Symbolleiste Online das Zielsystem aus. Hierzu muss TwinCAT gestartet sein. Im Beispiel ist dies die Ethernet-Karte mit der Box 2 und die Run-Time 1 des Busklemmen-Controllers. Abb. 125: Auswahl des Zielsystems - Box 2, Run-Time 1 des Busklemmen-Controllers Version: 2.2.0 BX5100...
-
Seite 137: Canopen Kommunikation
• Zyklisch synchron [} 146]: Über ein SYNC Telegramm werden die Baugruppen veranlasst, die vorher empfangenen Ausgangsdaten zu übernehmen und neue Eingangsdaten zu senden. • Angefordert (gepollt) [} 143]: Über ein CAN Datenanforderungstelegramm werden die Baugruppen veranlasst ihre Eingangsdaten zu senden. BX5100 Version: 2.2.0... -
Seite 138: Protokollbeschreibung
Bandbreite wird optimal genutzt. Konfiguration und Parametrierung Mit dem TwinCAT System Manager können alle CANopen Parameter komfortabel eingestellt werden. Für die Parametrierung der Beckhoff CANopen-Geräte mit Konfigurationstools dritter Hersteller steht Ihnen auf der Beckhoff Website (http://www.beckhoff.de) ein eds-File (electronic data sheet) zur Verfügung. Zertifizierung Die Beckhoff CANopen-Geräte verfügen über eine leistungsfähige Protokollimplementierung und sind vom... - Seite 139 Dateninhalt. Das erste Datenbyte enthält den sogenannten Command-Specifier (cs), das zweite Datenbyte die Knotenadresse, wobei die Knotenadresse 0 alle Knoten anspricht (Broadcast). 11-bit 2 Byte Nutzdaten Identifier 0x00 Node-ID Die folgende Tabelle gibt einen Überblick über alle CANopen Statusübergänge und die dazugehörigen Kommandos (Command Specifier im NMT Master-Telegramm): BX5100 Version: 2.2.0...
- Seite 140 Auslesen von Parameter 0x1000) auf den Bus erforderlich ist. Schließlich wird durch die Boot-Up-Nachricht das Ende der Initialisierungsphase kommuniziert; der Buskoppler signalisiert, dass er nun konfiguriert bzw. gestartet werden kann. Firmwarestand BA Bis Firmwarestand BA wurde für die Boot-Up-Nachricht der Emergency Identifier genutzt. Version: 2.2.0 BX5100...
- Seite 141 Das im ersten Guarding-Telegramm übertragene Toggle-Bit (t) hat den Wert 0. Anschließend wechselt (toggelt) das Bit in jedem Guarding-Telegramm und signalisiert so, ob ein Telegramm verloren ging. In den restlichen sieben Bit gibt der Knoten seinen Netzwerk Status (s) an: BX5100 Version: 2.2.0...
- Seite 142 Beim Heartbeat-Verfahren senden die Knoten ihre jeweilige Statusmeldung zyklisch selbsttätig. Es kann daher auf Remote Frames verzichtet werden und es wird weniger Buslast erzeugt als beim Guarding- Verfahren. Der Master sendet sein Heartbeat-Telegramm ebenfalls zyklisch, die Slaves können somit den Ausfall des Masters ebenfalls erkennen. Version: 2.2.0 BX5100...
-
Seite 143: Prozessdatenobjekte (Pdo)
Kommunikationsparameter Die PDOs können je nach Applikationsanforderung mit unterschiedlichen Kommunikationsparametern versehen werden. Wie alle CANopen-Parameter stehen auch diese im Objektverzeichnis des Gerätes, auf sie kann über die Servicedatenobjekte zugegriffen werden. Die Parameter für die Empfangs-PDOs stehen BX5100 Version: 2.2.0... - Seite 144 Default-Identifier stets auf die üblichere 11 Bit-Variante. Allgemein geht CANopen sparsam mit den zur Verfügung stehenden Identifiern um, sodass der Einsatz der 29 Bit-Variante auf Sonderanwendungen beschränkt bleibt - und daher auch von den Beckhoff CANopen Geräten nicht unterstützt wird. Über das höchstwertige Bit (Bit 31) lässt sich das Prozessdatenobjekt aktivieren bzw. abschalten.
- Seite 145 Ablauf des Event Timers verschickt. Beim Auftreten eines Ereignisses wird der Event Timer zurückgesetzt. Bei RxPDOs wird der Event Timer als Watchdog benutzt um das Eintreffen von ereignisgesteuerten PDOs zu überwachen. Sollte innerhalb der eingestellten Zeit kein PDO eingetroffen sein, so geht der Busknoten in den Fehlerzustand. BX5100 Version: 2.2.0...
- Seite 146 Daten ständig aktualisiert werden. CAN-Controller mit einfacher Nachrichtenfilterung (BasicCAN) reichen die Anforderung dagegen an die Applikation weiter, die nun das Telegramm mit den aktuellen Daten zusammenstellen kann. Das dauert länger, dafür sind die Daten aktuell. Beckhoff verwendet CAN Controller nach dem Basic CAN Prinzip.
- Seite 147 Controller zudem teilweise selbsttätig auf Remote Frames antworten (ohne vorher aktuelle Eingangs-Daten anzufordern), ist die Aktualität der gepollten Daten unter Umständen fragwürdig. Die Übertragungsart 252 und 253 wird aus diesen Gründen von den Beckhoff PC-Karten / Klemmen nicht unterstützt. Asynchron Die Übertragungsarten 254 + 255 sind asynchron oder auch ereignisgesteuert. Bei Übertragungsart 254 ist das Ereignis herstellerspezifisch, bei 255 im Geräteprofil definiert.
- Seite 148 CANopen Kommunikation Abb. 135: Zeitl. Diagramm „Inhibit-Time“ Die Beckhoff PC-Karten FC510x / EL6751 Klemme können zwar die Inhibit-Zeit auf Slave-Geräten parametrieren, unterstützen sie jedoch selbst nicht. Eine Spreizung der gesendeten PDOs (Sendeverzögerung) ergibt sich automatisch aus der gewählten Zyklus-Zeit der SPS - und es macht wenig Sinn, die SPS schneller laufen zu lassen als es die Busbandbreite zulässt.
- Seite 149 In der Regel genügt die Default-Belegung der Prozessdatenobjekte (Default Mapping) bereits den Anforderungen. Für spezielle Anwendungsfälle kann die Belegung jedoch verändert werden: So unterstützen beispielsweise die Beckhoff CANopen Buskoppler das variable Mapping, bei dem die Applikationsobjekte (Ein- und Ausgangsdaten) frei den PDOs zugeordnet werden können. Hierzu müssen die Mapping-Tabellen konfiguriert werden: Ab CANopen Version 4 ist nur noch die folgende Vorgehensweise zulässig, die genau...
-
Seite 150: Pdo-Parametrierung
Prozessabbilder werden synchronisiert: Eingänge werden gleichzeitig gelesen, Ausgangsdaten gleichzeitig gültig gesetzt - die Qualität dieser Synchronisierung ist allerdings implementierungsabhängig. Die BECKHOFF PC-Karten FC510x / CANopen-Klemme EL6751sind in der Lage, das CANopen Bussystems mit den Zyklen der Anwendungsprogramme (SPS bzw. NC) zu synchronisieren. - Seite 151 30-40% Grundlast genügend Reserven für worst-case-Szenarien hat - diese Annahme macht aber eine sorgfältige Analyse nicht überflüssig, wenn Verzögerungen zu kritischen Anlagenzuständen führen können. Die BECKHOFF CANopen-Master-Karten FC510x / CANopen-Masterklemme EL6751 zeigen die Buslast über den System Manager ein. Diese Variable kann auch in der SPS verarbeitet oder in der Visualisierung zur Anzeige gebracht werden.
-
Seite 152: Servicedatenobjekte (Sdo)
4 Byte groß, daher beschränkt sich diese Beschreibung auf die Übertragung dieser Daten im beschleunigten Transfer (Expedited Transfer). Protokoll Im Folgenden wird der Aufbau der SDO-Telegramme beschrieben. Client -> Server, Upload Request 11-bit Identifier 8 Byte Nutzdaten 0x600 (=1536dez) + Node- 0x40 Index0 Index1 SubIdx 0x00 0x00 0x00 0x00 Version: 2.2.0 BX5100... - Seite 153 In der Regel ist das jedoch nicht erforderlich, da jeweils nur die niederwertigen Datenbytes bis zur Länge des zu beschreibenden Objektverzeichniseintrags ausgewertet werden. Ein Download von Daten bis zu 4 Byte Länge kann daher bei BECKHOFF Busknoten immer mit 22 h im ersten CAN-Datenbyte erfolgen. Client -> Server, Download Response 11-bit Identifier 8 Byte Nutzdaten...
- Seite 154 0x06 0A 00 23 Resource nicht verfügbar 0x08 00 00 21 Zugriff wegen lokaler Applikation nicht möglich 0x08 00 00 22 Zugriff wegen aktuellem Gerätestatus nicht möglich Für die Register-Kommunikation (Index 0x4500, 0x4501) wurden weitere, herstellerspezifische Fehler-Codes eingeführt: Version: 2.2.0 BX5100...
- Seite 155 Funktion noch aktiv, später erneut versuchen 0x05 04 00 40 Allgemeiner Routing Fehler 0x06 06 00 21 Fehler Zugriff BC Tabelle 0x06 09 00 10 Allgemeiner Fehler bei Kommunikation mit Klemme 0x05 04 00 47 Time-out bei Kommunikation mit Klemme BX5100 Version: 2.2.0...
-
Seite 156: Identifier-Verteilung
Boot-Up Nachricht 0x1017 [} 165]) *) Für PDO3 und PDO4 gilt das Beckhoff Default Mapping. In den meisten Konfigurationen enthalten PDO 3+4 Daten von analogen Ein/Ausgängen, es können jedoch auch "überzählige" Daten von digitalen E/As oder Daten von Sonderklemmen sein. Details finden Sie im Abschnitt PDO Mapping [} 143]. - Seite 157 Herstellerspezische Default Identifier für zusätzliche PDOs Default Identifier für zusätzliche PDOs Den zusätzlichen PDOs, die von den Beckhoff Buskopplern nach dem Standardschema befüllt werden, wird kein Identifier zugeordnet. Der Anwender muss in das Objektverzeichnis einen Identifier für diese PDOs eintragen. Einfacher ist es, die belegten PDOs über das Objekt 0x5500 [} 179] aktivieren.
- Seite 158 Die Kommunikations- und Mapping-Parameter der Transmit-PDOs stehen in den Bereichen 0x1800 - 0x180F bzw. 0x1A00 - 0x1A0F. Herstellerspezifischer Bereich In diesem Bereich finden sich Einträge, die BECKHOFF spezifisch sind, z. B.: • Datenobjekte für Sonderklemmen • Objekte für die Register-Kommunikation, über die auf alle internen Register der Buskoppler und Busklemmen zugegriffen werden kann.
-
Seite 159: Erreichbarkeit Der Objekte Und Register
SDO-Zugriff auf das Objektverzeichnis (Objekte 0x4500 und 0x4501) er- reichbar - wenn auch nicht mit dem gleichen Bedienungskomfort wie mit der Konfigurations-Softwa- re KS2000. Parameter Index BK5120/BK515x BK5110 LC5100 BX5100/BC5150 CX8051/B510 0x1000 Gerätetyp [} 161] 0x1001 Fehlerregister [} 161] 0x1003 Fehlerspeicher [} 161]... - Seite 160 CANopen Kommunikation Parameter Index BK5120/BK515x BK5110 LC5100 BX5100/BC5150 CX8051/B510 Merkerbereich %MB0-511 0x2F00 Merkerbereich %MB511-1023 0x2F01 Merkerbereich %MB1024-1535 0x2F02 Merkerbereich %MB1536-2047 0x2F03 Merkerbereich %MB2048-2559 0x2F04 Merkerbereich %MB2560-3071 0x2F05 Merkerbereich %MB3072-3584 0x2F06 Merkerbereich %MB3585-4095 0x2F07 0x2600 3-Byte Sonderklemmen, Eingangsdaten [} 171] 0x2700 3-Byte Sonderklemmen, Ausgangsdaten [} 171]...
-
Seite 161: Objekte Und Daten
N Keiner Es werden maximal 10 Fehlerzustände gespei- field chert. Der 32 Bit-Wert im Fehlerspeicher ist in zwei 16 Bit-Felder unterteilt: Additional Code Error Code Der Additional Code enthält den Error Trigger (siehe Emergency-Objekt) und damit eine detaillierte Fehlerbeschreibung. BX5100 Version: 2.2.0... - Seite 162 Watchdog- Zeit entspricht hierbei dem 1,5-fachen der eingestellten communication cycle period - es kann also der vorgesehene SYNC-Abstand eingetragen werden. Das E/A Update wird bei den Beckhoff CANopen Busknoten direkt nach Empfang des SYNC Telegramms durchgeführt, wenn folgende Voraussetzungen gegeben sind: - Firmwarestand ab C0 (ab CANopen Version 4.01).
- Seite 163 Operational ist. Es wird empfohlen, vor dem Abspeichern das gesamte Netz in den Zustand Pre-Operational zu versetzen. Dadurch wird ein Puffer-Überlauf vermieden. Gespeichert werden: • Die aktuelle Klemmenbestückung (Anzahl jeder Klemmenkategorie) • Alle PDO Parameter (Identifier, Transmission Type, Inhibit Zeit, Mapping). BX5100 Version: 2.2.0...
- Seite 164 Bit 23...16 Bit 15...0 reserviert (0) Node-ID (Unsigned8) heartbeat time in ms (Unsigned16) Aus der Node-ID ergibt sich der überwachte Identifier durch die Default-Identifier-Verteilung: Guard- ID = 0x700 + Node-ID. Wie bei CANopen üblich wird das LSB zuerst und das MSB zuletzt übertragen. Version: 2.2.0 BX5100...
- Seite 165 Identity Object: Unsigned8 Das Identity Objekt enthält allgemeine Angaben Anzahl Elemente zu Art und Ausgabestand des Gerätes. Vendor ID Unsigned32 ro 0x00000002 Herstellerkennung. Beckhoff hat die Vendor-ID 2 Product Code Unsigned32 ro abhängig vom Gerätekennung Produkt Revision Number Unsigned32 ro Versionsnummer...
- Seite 166 CMS Priority Unsigned8 Aus Gründen der Abwärtskompatibilität vorhan- Group den, nicht genutzt. Event Timer Unsigned16 rw Event-Timer. Definiert Watchdog Zeit für Emp- fangsüberwachung des PDOs. Die Anzahl der RxPDOs je Busknoten-Typ kann den technischen Daten entnommen werden. Version: 2.2.0 BX5100...
- Seite 167 Objekte gemappt. Da die analogen Ausgänge wortweise organisiert sind, kann die Länge des PDOs in Bytes direkt dem Subindex 0 entnommen werden. Um das Mapping zu verändern muss eine bestimmte Reihenfolge eingehalten werden (siehe Objekt Index 0x1600). BX5100 Version: 2.2.0...
- Seite 168 DS401 V2 schreibt für die PDOs 3 und 4 als Default Mapping analoge Ein- bzw. Ausgangsdaten vor. Das entspricht dann dem Beckhoff Default Mapping, wenn weniger als 65 digitale Ein- bzw. Ausgänge vorhanden sind. Um die Abwärtskompatibilität zu gewährleisten wird das Beckhoff Default Mapping beibehalten - die Geräte entsprechen damit in ihrem Mapping-Verhalten DS401...
- Seite 169 COB-ID (Communication Object Identifier) typ) TxPDO1 Transmission Ty- Unsigned8 Übertragungsart des PDOs Inhibit Time Unsigned16 rw Wiederholungsverzögerung [Wert x 100 µs] CMS Priority Unsigned8 Aus Gründen der Abwärtskompatibilität vorhan- Group den, nicht genutzt. Event Timer Unsigned16 rw Event-Timer BX5100 Version: 2.2.0...
- Seite 170 Das 3. bis 16. Sende-PDO (TxPDO3ff) wird vom Busknoten je nach Klemmen-Bestückung (bzw. je nach Erweiterungs-Modulen) automatisch mit einem Default Mapping versehen. Die Vorgehensweise ist im Kapitel PDO-Mapping beschrieben. Um das Mapping zu verändern muss eine bestimmte Reihenfolge eingehalten werden (siehe Objekt Index 0x1600). Version: 2.2.0 BX5100...
- Seite 171 DS401 V2 schreibt für die PDOs 3+4 als Default Mapping analoge Ein- bzw. Ausgangsdaten vor. Das entspricht dem Beckhoff Default Mapping dann, wenn weniger als 65 digitale Ein- bzw. Aus- gänge vorhanden sind. Um die Abwärtskompatibilität zu gewährleisten wird das Beckhoff Default Mapping beibehalten - die Geräte entsprechen damit in ihrem Mapping-Verhalten DS401 V1, in al-...
- Seite 172 Attrb. Map. Default-Wert Bedeutung 0x2D00 0 Anzahl Elemente Unsigned8 abhängig von Anzahl verfügbarer 6-Byte Sonderkanäle, Aus- Typ und Be- gänge stückung 1st output block Unsigned48 rww 0x0000000000 1. Ausgangskanal 0X40 64. output block Unsigned48 rww 0x0000000000 64. Ausgangskanal Version: 2.2.0 BX5100...
- Seite 173 Wert zur Verfügung steht. Beim SDO-Lesezugriff ist also zu überprüfen, dass die Tabellennummer im Wertebereich 0...0x7F liegt. Ein Zugriffsfehler bei der Register-Kommunikation wird durch entsprechende Rückgabewerte des SDO- Protokolls angezeigt (siehe Kapitel SDO, Abbruch Parameterkommunikation). BX5100 Version: 2.2.0...
- Seite 174 Hierzu muss Tabelle 100, Register 3 mit dem Wert 7 beschrieben werden, das erfolgt durch SDO- Schreibzugriff (Download Request) auf Index 0x4500, Subindex 0 mit dem 32 Bit-Wert E4 03 00 07 (0xE4 = 0x64+0x80): Id=0x600+Node-ID DLC=8; Data=23 00 45 00 07 00 03 E4 Version: 2.2.0 BX5100...
- Seite 175 Tabelle 0, Register 2 enthält die K-Buskonfiguration und ist wie folgt codiert (Default-Wert: 0x0006): A: Autoreset Bei K-Bus-Fehler wird zyklisch versucht, den K-Bus durch Reset wieder zu aufzustarten. Wenn Emergencies und Guarding nicht ausgewertet werden, so kann es bei aktiviertem Autoreset vorkommen, dass Aus- und Eingangsinformation unerkannt verloren geht. BX5100 Version: 2.2.0...
- Seite 176 0: nur Nutzdaten (Default) 1: komplette Auswertung (Achtung: Analogkanäle benötigen dann statt z. B. 2 Eingangsbytes je 3 Eingangs- und 3 Ausgangsbytes; statt 4 Kanäle je PDO werden für 2 Kanäle je ein Rx- und ein TxPDO benötigt) Version: 2.2.0 BX5100...
- Seite 177 Anschließend Lesezugriff (Upload Request) auf den gleichen Index/Subindex, hierbei ist der Datenwert beliebig (hier: 0x00). Id=0x600+Node-ID DLC=8; Data=40 01 45 05 00 00 00 00 Der Koppler antwortet mit dem Upload Response Telegramm: Id=0x580+Node-ID DLC=8; Data=43 01 45 05 06 31 20 01 BX5100 Version: 2.2.0...
-
Seite 178: Überprüfen Sie Den Geschriebenen Wert
Schreibzugriff (Download Request) der folgende 32 Bit-Wert auf Index 0x4501, Subindex 05 zu schreiben: 81 20 21 06 (0x81=01+0x80; 0x20=32;0x2106 = Registerwert). Das entsprechende Telegramm sieht auf dem Bus wie folgt aus: Id=0x600+Node-ID DLC=8; Data=23 01 45 05 06 21 20 81 Version: 2.2.0 BX5100... - Seite 179 Es ist darauf zu achten, dass der Index 0x5500 nicht genutzt wird, wenn Buskoppler mit mehr als 5 PDOs in Netzen mit Knoten-Adressen >64 vorhanden sind, da es sonst zu Identifier-Überschneidungen kommen kann. In diesem Fall müssen die PDO Identifier individuell eingestellt werden. Der Übersichtlichkeit halber sind die nach CANopen definierten Default-Identifier hier ebenfalls aufgeführt: BX5100 Version: 2.2.0...
- Seite 180 Operational Status) sind möglich und werden bei der nächsten Eingangsdaten-Änderung ausgewertet. Die Interrupt Maske wird für TxPDOs mit analogen Eingangsdaten nicht ausgewertet, wenn für die Eingänge Grenzwerte (0x6424, 0x6425) oder die Delta Funktion (0x6426) aktiviert wurden. Dieser Eintrag ist ab Firmware Stand C3 implementiert. Version: 2.2.0 BX5100...
- Seite 181 Unsigned16 ro 0x0000 1. Eingangskanal 0XFE 254. input Unsigned16 ro 0x0000 254. Eingangskanal Die analogen Signale werden linksbündig dargestellt. Damit wird die Darstellung im Prozessabbild unabhängig von der tatsächlichen Auflösung. Details zum Datenformat finden sich beim jeweiligen Signaltyp. BX5100 Version: 2.2.0...
- Seite 182 Bedeutung 0x6426 0 Anzahl Elemente Unsigned8 abhängig von Typ Anzahl verfügbarer analoger Eingangs- und Bestückung Kanäle delta value 1st input Unsigned16 rw 0x0000 Deltawert 1. Eingangskanal 0XFE delta value 254. input Unsigned16 rw 0x0000 Deltawert 254. Eingangskanal Version: 2.2.0 BX5100...
- Seite 183 Wert seit dem letzten Senden um mehr als den Deltawert verändert hat. Zusätzlich muss die Ereignissteuerung aktiviert sein (Objekt 0x6423). Das Datenformat entspricht dem der Analogeingänge (Deltawert: nur positive Werte). 6.3.4 Objekte und Daten der BX5100/BC5150 Zugriff auf lokierte Merker Index Subindex Name Attrb.
- Seite 184 CANopen Kommunikation ADS-Kommunikation 6.4.1 ADS-Dienste Siehe Programmierung [} 102] Version: 2.2.0 BX5100...
-
Seite 185: Fehlerbehandlung Und Diagose
Zustand des K-Bus Sollte der interne K-Bus oder einer seiner Busklemmen ein Problem haben wird dies im K-Bus-State angezeigt. Eine genauere Fehlerursache kann mit einem Funktionsbaustein ausgelesen werden (in Vorbereitung). Verknüpfen Sie hierfür die Variable K-Bus-State mit Ihrem SPS-Programm. BX5100 Version: 2.2.0... -
Seite 186: Diagnose-Leds
• Die DIAG LEDs befinden sich über der linken Seite des Navigationsschalters. Sie zeigen den Zustand des Feldbusses, der PLC und des K-Busses an. Abb. 143: Diagnose LEDs für den Feldbus, die SPS, den K-Bus und die Spannungsversorgung Version: 2.2.0 BX5100... - Seite 187 BX im Zustand PRE-Operational und Fehler Schnelles Blinken gefolgt von 1 x langsames Blinken - Guarding-Timeout 2 x langsames Blinken - SYNC-Timeout 3 x langsames Blinken - Event-Timeout leuchtet grün Buskommunikation ist in Ordnung, BX-Controller ist im Datenaustausch BX5100 Version: 2.2.0...
- Seite 188 Bootprojekt - PLC läuft (leuchtet nur während des Zyklus) LED zur K-Bus Diagnose LED I/O Bedeutung über den K-Bus werden keine Daten ausgetauscht leuchtet rot Fehler Blinken - Fehlerart - Anzeige Display leuchtet orange Register- bzw. KS2000-Online-Zugriff leuchtet grün K-Bus ist in Ordnung und läuft Version: 2.2.0 BX5100...
- Seite 189 BX-Controller erneut Starten, falls der Fehler erneut stimmt nicht mehr auftritt, Herstellereinstellung mit der Konfigurationssoftware KS2000 setzen Länge der K-Bus-Daten BX-Controller erneut Starten, falls der Fehler erneut stimmt nicht mehr auftritt, Herstellereinstellung mit der Konfigurationssoftware KS2000 setzen BX5100 Version: 2.2.0...
- Seite 190 Busklemme den Busaufbau mit der Konfiguration. Firmware Fehler werden im Display mit FW-Error und einer Fehlernummer angegeben. Bitte setzen Sie sich mit dem Support in Verbindung. Anzeige Display Bedeutung FW-Error 0xnnnn Wenden Sie sich an den Support Version: 2.2.0 BX5100...
-
Seite 191: Anhang
Zielgruppe Diese Kurz-Übersicht wendet sich an Anwender, die CAN bereits kennen. Sie zeigt, welche CAN- Nachrichten erforderlich sind, um mit BECKHOFF CANopen Ein-/Ausgabebaugruppen in der Ausgangskonfiguration (mit Default-Einstellungen) zu arbeiten. In jedem Fall ist die ausführliche Dokumentation zu lesen und zu berücksichtigen! Hardware-Konfiguration Über den DIP-Schalter sind auf den Buskopplern eine einheitliche Übertragungsrate sowie jeweils... - Seite 192 4-8 Byte Nutzdaten (je nach Zahl der analogen Ausgänge) 0x300(=768 ) + Node-ID A0.0 A0.1 A1.0 A1.1 A2.0 A2.1 A3.0 A3.1 A x.0...A x.1: Analogausgang x. Die detaillierte Beschreibung des Datenformats findet sich im Objektverzeichnis bei Objekt 0x6411 [} 161]. Version: 2.2.0 BX5100...
- Seite 193 Mit den beschriebenen Telegrammen sind Sie nun in der Lage, die Baugruppen zu starten und zu stoppen, Eingänge zu lesen, Ausgänge zu schreiben und die Baugruppen zu überwachen. Versäumen Sie nicht, das Handbuch sorgfältig zu lesen. Nur so können Sie die vielfältigen Features der BECKHOFF CANopen Buskoppler wirklich nutzen.
- Seite 194 Die hier aufgeführte Liste soll bei der Identifizierung und Zuordnung von CANopen Nachrichten helfen. Aufgeführt sind alle von der CANopen Default Identifier Verteilung zugeordneten Identifier, sowie die von BECKHOFF via Objekt 0x5500 [} 179] vergebenen herstellerspezifischen Default Identifier (nur in Netzen mit Knotenadressen <64 zu verwenden).
- Seite 195 TxPDO1, DI, Nd.60 0x193 TxPDO1, DI, Nd.19 0x1A8 TxPDO1, DI, Nd.40 0x1BD TxPDO1, DI, Nd.61 0x194 TxPDO1, DI, Nd.20 0x1A9 TxPDO1, DI, Nd.41 0x1BE TxPDO1, DI, Nd.62 0x195 TxPDO1, DI, Nd.21 0x1AA TxPDO1, DI, Nd.42 0x1BF TxPDO1, DI, Nd.63 BX5100 Version: 2.2.0...
- Seite 196 TxPDO2, AI, Nd.60 0x293 TxPDO2, AI, Nd.19 0x2A8 TxPDO2, AI, Nd.40 0x2BD TxPDO2, AI, Nd.61 0x294 TxPDO2, AI, Nd.20 0x2A9 TxPDO2, AI, Nd.41 0x2BE TxPDO2, AI, Nd.62 0x295 TxPDO2, AI, Nd.21 0x2AA TxPDO2, AI, Nd.42 0x2BF TxPDO2, AI, Nd.63 Version: 2.2.0 BX5100...
- Seite 197 TxPDO3*, Nd.59 0x392 TxPDO3*, Nd.18 0x3A7 TxPDO3*, Nd.39 0x3BC TxPDO3*, Nd.60 0x393 TxPDO3*, Nd.19 0x3A8 TxPDO3*, Nd.40 0x3BD TxPDO3*, Nd.61 0x394 TxPDO3*, Nd.20 0x3A9 TxPDO3*, Nd.41 0x3BE TxPDO3*, Nd.62 0x395 TxPDO3*, Nd.21 0x3AA TxPDO3*, Nd.42 0x3BF TxPDO3*, Nd.63 BX5100 Version: 2.2.0...
- Seite 198 TxPDO4*, Nd.60 1171 0x493 TxPDO4*, Nd.19 1192 0x4A8 TxPDO4*, Nd.40 1213 0x4BD TxPDO4*, Nd.61 1172 0x494 TxPDO4*, Nd.20 1193 0x4A9 TxPDO4*, Nd.41 1214 0x4BE TxPDO4*, Nd.62 1173 0x495 TxPDO4*, Nd.21 1194 0x4AA TxPDO4*, Nd.42 1215 0x4BF TxPDO4*, Nd.63 Version: 2.2.0 BX5100...
- Seite 199 TxPDO5*, Nd.60 1683 0x693 TxPDO5*, Nd.19 1704 0x6A8 TxPDO5*, Nd.40 1725 0x6BD TxPDO5*, Nd.61 1684 0x694 TxPDO5*, Nd.20 1705 0x6A9 TxPDO5*, Nd.41 1726 0x6BE TxPDO5*, Nd.62 1685 0x695 TxPDO5*, Nd.21 1706 0x6AA TxPDO5*, Nd.42 1727 0x6BF TxPDO5*, Nd.63 BX5100 Version: 2.2.0...
- Seite 200 TxPDO6*, Nd.59 0x1D2 TxPDO6*, Nd.18 0x1E7 TxPDO6*, Nd.39 0x1FC TxPDO6*, Nd.60 0x1D3 TxPDO6*, Nd.19 0x1E8 TxPDO6*, Nd.40 0x1FD TxPDO6*, Nd.61 0x1D4 TxPDO6*, Nd.20 0x1E9 TxPDO6*, Nd.41 0x1FE TxPDO6*, Nd.62 0x1D5 TxPDO6*, Nd.21 0x1EA TxPDO6*, Nd.42 0x1FF TxPDO6*, Nd.63 Version: 2.2.0 BX5100...
- Seite 201 TxPDO7*, Nd.59 0x2D2 TxPDO7*, Nd.18 0x2E7 TxPDO7*, Nd.39 0x2FC TxPDO7*, Nd.60 0x2D3 TxPDO7*, Nd.19 0x2E8 TxPDO7*, Nd.40 0x2FD TxPDO7*, Nd.61 0x2D4 TxPDO7*, Nd.20 0x2E9 TxPDO7*, Nd.41 0x2FE TxPDO7*, Nd.62 0x2D5 TxPDO7*, Nd.21 0x2EA TxPDO7*, Nd.42 0x2FF TxPDO7*, Nd.63 BX5100 Version: 2.2.0...
- Seite 202 1020 0x3FC TxPDO8*, Nd.60 0x3D3 TxPDO8*, Nd.19 1000 0x3E8 TxPDO8*, Nd.40 1021 0x3FD TxPDO8*, Nd.61 0x3D4 TxPDO8*, Nd.20 1001 0x3E9 TxPDO8*, Nd.41 1022 0x3FE TxPDO8*, Nd.62 0x3D5 TxPDO8*, Nd.21 1002 0x3EA TxPDO8*, Nd.42 1023 0x3FF TxPDO8*, Nd.63 Version: 2.2.0 BX5100...
- Seite 203 TxPDO9*, Nd.60 1235 0x4D3 TxPDO9*, Nd.19 1256 0x4E8 TxPDO9*, Nd.40 1277 0x4FD TxPDO9*, Nd.61 1236 0x4D4 TxPDO9*, Nd.20 1257 0x4E9 TxPDO9*, Nd.41 1278 0x4FE TxPDO9*, Nd.62 1237 0x4D5 TxPDO9*, Nd.21 1258 0x4EA TxPDO9*, Nd.42 1279 0x4FF TxPDO9*, Nd.63 BX5100 Version: 2.2.0...
- Seite 204 TxPDO10*, Nd.60 1491 0x5D3 TxPDO10*, Nd.19 1512 0x5E8 TxPDO10*, Nd.40 1533 0x5FD TxPDO10*, Nd.61 1492 0x5D4 TxPDO10*, Nd.20 1513 0x5E9 TxPDO10*, Nd.41 1534 0x5FE TxPDO10*, Nd.62 1493 0x5D5 TxPDO10*, Nd.21 1514 0x5EA TxPDO10*, Nd.42 1535 0x5FF TxPDO10*, Nd.63 Version: 2.2.0 BX5100...
- Seite 205 TxPDO11*, Nd.60 1747 0x6D3 TxPDO11*, Nd.19 1768 0x6E8 TxPDO11*, Nd.40 1789 0x6FD TxPDO11*, Nd.61 1748 0x6D4 TxPDO11*, Nd.20 1769 0x6E9 TxPDO11*, Nd.41 1790 0x6FE TxPDO11*, Nd.62 1749 0x6D5 TxPDO11*, Nd.21 1770 0x6EA TxPDO11*, Nd.42 1791 0x6FF TxPDO11*, Nd.63 BX5100 Version: 2.2.0...
- Seite 206 SDO Tx Nd.40 1469 0x5BD SDO Tx Nd.61 1428 0x594 SDO Tx Nd.20 1449 0x5A9 SDO Tx Nd.41 1470 0x5BE SDO Tx Nd.62 1429 0x595 SDO Tx Nd.21 1450 0x5AA SDO Tx Nd.42 1471 0x5BF SDO Tx Nd.63 Version: 2.2.0 BX5100...
-
Seite 207: Firmware-Update
Programm wir über die serielle Schnittstelle übertragen. Hinweis für BX3100: Die Firmware 0.64 (oder kleiner) des BX3100 erlaubt kein Update. Sollte ein Update dieser Geräte erforderlich sein, schicken Sie den BX3100 mit dem Hinweis auf ein Update zum Hersteller. BX5100 Version: 2.2.0... - Seite 208 Anhang Beckhoff Automation GmbH & Co. KG Abt. Service Stahlstr. 31 D-33415 Verl Firmware Update Programm 241 (https://infosys.beckhoff.com/content/1031/bx5100/Resources/ zip/3238791819.zip) 71 kByte (für Windows NT4.0 SP6, 2000, XP). Das Programm FirmwareUpdate.exe und die TcRouterHelper.dll müssen im gleichen Verzeichnis stehen. Mit einem Doppelklick auf FirmwareUpdate.exe öffnen Sie das Programm.
- Seite 209 Abb. 149: Statusmeldungen des Firmware-Updates CFC-Client* Der BX bietet mit den CFC-Client die Möglichkeit den gesamten Speicherinhalt eines BX-Controllers zu kopieren. Die Daten aus dem Speicher werden in einer BIN Datei gespeichert und können auf einen identischen Controller geladen werden. BX5100 Version: 2.2.0...
- Seite 210 Anhang Der CFC-Client läuft auf Windows 9x, NT, 2000 und XP und ist völlig unabhängig von TwinCAT. CFC-Client (https://infosys.beckhoff.com/content/1031/bx5100/Resources/zip/3238793995.zip) (Hinweis: Die DLLs müssen Sie manuell per regsvr32 Registrieren) Wenn Sie den CFC-Client starten stellen Sie als erstes die COM-Parameter ein.
- Seite 211 Abb. 153: Öffnen des COM-Ports Mit Upload erstellen Sie eine Kopie des BX-Speichers speichern diese als BIN-Datei. Abb. 154: Upload des BX-Speicherinhalts in ein BIN-File Mit Download wird das BIN-File zum BX-Controller geladen. Der Controller startet automatisch nach erfolgreichem Download. BX5100 Version: 2.2.0...
-
Seite 212: Beispielprogramme - Übersicht
SSB - BX / BX Kommunikation [} 62] IclA Drive am SSB SSB - IclA Drive [} 66] Lenze Frequenzumrichter am SSB SSB - Lenze Drive [} 72] Allgemeine Betriebsbedingungen Um einen fehlerfreien Betrieb der Feldbuskomponenten zu erreichen, müssen die nachfolgenden Bedingungen eingehalten werden. Version: 2.2.0 BX5100... - Seite 213 Schutz gegen Fremdkörper kleiner 12 mm im Durchmesser Schutz gegen Wasser kein Schutz Kennzeichnung der Komponenten Jede ausgelieferte Komponente enthält einen Aufkleber, mit Informationen über die Zulassung des Produkts. Abb. 156: Typenschild eines BX-Controllers Auf dem Aufkleber sind folgende Informationen abzulesen: BX5100 Version: 2.2.0...
-
Seite 214: Zulassungen
Versorgungsspannung Us 24 V (Benutzen Sie eine 4 A Sicherung oder eine der Class 2 entsprechende Spannungsversorgung um die UL- Anforderungen zu erfüllen!) Hersteller Beckhoff Automation GmbH CE-Zeichen Konformitätskennzeichnung UL-Zeichen Kennzeichen für UL-Zulassung. UL steht für Underwriters Laboratories Inc., die führende Zertifizierungsorganisation für Nordamerika mit Sitz in den USA. - Seite 215 Franzis Verlag 2001. 244 Seiten. ISBN 3-7723-5745-8 Englische Bücher • Konrad Etschberger: Controller Area Network, Ixxat Press, 2001. 440 Seiten. ISBN 3-00-007376-0 • M. Farsi, M. Barbosa: CANopen Implementation, RSP 2000. 210 Seiten. ISBN 0-86380-247-8 Abb. 158: CAN - Controller-Area-Network BX5100 Version: 2.2.0...
-
Seite 216: Abkürzungsverzeichnis
Empfangs-PDO. PDOs werden immer aus Sicht des jeweiligen Gerätes bezeichnet. So wird ein TxPDO mit Eingangsdaten einer E/A Baugruppe zum RxPDO aus Sicht der Steuerung. Service Data Object oder Servicedatenobjekt. CAN-Telegramm mit Protokoll zur Kommunikation mit Daten des Objektverzeichnisses (typisch Parameterdaten). TxPDO Sende-PDO (aus Sicht des CAN-Knotens bezeichnet). Version: 2.2.0 BX5100... -
Seite 217: Support Und Service
Anhang 8.11 Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Support Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:... - Seite 218 Abb. 20 Aufbau CAN-Kabel ZB5100......................Abb. 21 Aufbau CAN-/DeviceNet-Kabel ZB5200 ..................Abb. 22 Pinbelegung BK5151, EL6751..................... Abb. 23 FC51x2 ............................Abb. 24 Belegung Verbindungsbuchse BK51x0/BX5100 ................. Abb. 25 LC5100 ............................Abb. 26 Pinbelegung M12 Stecker Feldbus Box..................Abb. 27 Anlaufverhalten des Busklemmen-Controllers................
- Seite 219 Abb. 84 Öffnen des Optionsmenüs ......................Abb. 85 Auswahl des Source Downloads ....................Abb. 86 Download des Programm Codes....................Abb. 87 Vorschritt des Downloads ......................Abb. 88 Upload eines Programms ......................Abb. 89 Auswahl des Datenübertragungswegs ..................Abb. 90 Auswahl des Gerätes........................BX5100 Version: 2.2.0...
- Seite 220 Abb. 121 Auswahl des Datenübertragungswegs - AMS ................134 Abb. 122 Auswahl des Gerätes........................134 Abb. 123 Darstellung des BX5100 im TwinCAT System Manager ............. 135 Abb. 124 Auswahl des Zielsystems ......................136 Abb. 125 Auswahl des Zielsystems - Box 2, Run-Time 1 des Busklemmen-Controllers ......136 Abb.
- Seite 221 Abb. 154 Upload des BX-Speicherinhalts in ein BIN-File ................211 Abb. 155 Download eines BIN-Files auf den BX-Controller................ 212 Abb. 156 Typenschild eines BX-Controllers....................213 Abb. 157 CANopen ............................ 215 Abb. 158 CAN - Controller-Area-Network ....................215 BX5100 Version: 2.2.0...