Siemens SIMOTICS T-1FW6 High Speed Projektierungshandbuch
Einbau-torquemotoren
Vorschau ausblenden
Andere Handbücher für SIMOTICS T-1FW6 High Speed:
- Projektierungshandbuch (560 Seiten) ,
- Betriebsanleitung (120 Seiten) ,
- Projektierungshandbuch (174 Seiten)
Inhaltsverzeichnis
Quicklinks
Inhaltsverzeichnis

Verwandte Anleitungen für Siemens SIMOTICS T-1FW6 High Speed









Inhaltszusammenfassung für Siemens SIMOTICS T-1FW6 High Speed
-
Seite 3: Antriebstechnik Einbau-Torquemotoren 1Fw6 High Speed
Einleitung ___________________ Grundlegende Sicherheitshinweise SIMOTICS ___________________ Beschreibung des Motors ___________________ Mechanische Eigenschaften Antriebstechnik Einbau-Torquemotoren Motorkomponenten und Optionen 1FW6 High Speed ___________________ Projektierung Projektierungshandbuch Technische Daten und Kennlinien ___________________ Einsatzvorbereitung ___________________ Elektrischer Anschluss ___________________ Einbauzeichnungen / Maßblätter ___________________ Gekoppelte Motoren ___________________ Anhang 10/2018 6SN1197-0AE03-0AP0... -
Seite 4: Rechtliche Hinweise
Hinweise in den zugehörigen Dokumentationen müssen beachtet werden. Marken Alle mit dem Schutzrechtsvermerk ® gekennzeichneten Bezeichnungen sind eingetragene Marken der Siemens AG. Die übrigen Bezeichnungen in dieser Schrift können Marken sein, deren Benutzung durch Dritte für deren Zwecke die Rechte der Inhaber verletzen kann. Haftungsausschluss Wir haben den Inhalt der Druckschrift auf Übereinstimmung mit der beschriebenen Hard- und Software geprüft. -
Seite 5: Einleitung
Einleitung Standardumfang In der vorliegenden Dokumentation ist die Funktionalität des Standardumfangs beschrieben. Durch den Maschinenhersteller vorgenommene Ergänzungen oder Änderungen am Motor dokumentiert der Maschinenhersteller. Diese Dokumentation kann aus Gründen der Übersichtlichkeit nicht sämtliche Detail- informationen zu allen Typen des Produkts enthalten. Ferner kann diese Dokumentation nicht jeden möglichen Fall der Aufstellung, des Betriebs und der Instandhaltung berücksichtigen. -
Seite 6: Weiterführende Informationen
● Dokumentation online nutzen (Handbücher / Informationen finden und durchsuchen) Weiterführende Informationen (https://support.industry.siemens.com/cs/de/de/view/108998034) Bei Fragen zur technischen Dokumentation (z. B. Anregungen, Korrekturen) senden Sie an folgende Adresse eine E-Mail (mailto:docu.motioncontrol@siemens.com). Internetadresse für Produkte Produkte (http://www.siemens.com/motioncontrol) My support Unter folgendem Link gibt es Informationen, wie Sie Dokumentation auf Basis der Siemensinhalte individuell zusammenstellen und für die eigene Maschinendokumentation... -
Seite 7: Technical Support
Einleitung Training Unter folgendem Link gibt es Informationen zu SITRAIN - dem Training von Siemens für Produkte, Systeme und Lösungen der Automatisierungstechnik: SITRAIN (http://siemens.com/sitrain) Technical Support Landesspezifische Telefonnummern für technische Beratung finden Sie im Internet unter Kontakt: Technical Support (https://support.industry.siemens.com) Wenn Sie Unterstützung zu den Themen "Applikation"... - Seite 8 Diese Druckschrift enthält Hyperlinks auf Webseiten Dritter. Siemens übernimmt für die Inhalte dieser Webseiten weder eine Verantwortung noch macht Siemens sich diese Webseiten und ihre Inhalte zu eigen, da Siemens die Informationen auf diesen Webseiten nicht kontrolliert und für die dort bereit gehaltenen Inhalte und Informationen auch nicht verantwortlich ist.
- Seite 9 Einleitung Hinweis zu Fremderzeugnissen Hinweis Empfehlung von Fremderzeugnissen Dieses Dokument enthält Empfehlungen von Fremderzeugnissen. Siemens kennt die grundsätzliche Eignung dieser Fremderzeugnisse. Sie können gleichwertige Erzeugnisse anderer Hersteller verwenden. Siemens übernimmt keine Gewährleistung für die Beschaffenheit von Fremderzeugnissen. Einbau-Torquemotoren 1FW6 High Speed...
- Seite 10 Einleitung Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 11: Inhaltsverzeichnis
Inhaltsverzeichnis Einleitung ............................. 3 Grundlegende Sicherheitshinweise ....................13 Allgemeine Sicherheitshinweise..................13 Geräteschaden durch elektrische Felder oder elektrostatische Entladung ......18 Industrial Security ......................19 Restrisiken von Antriebssystemen (Power Drive Systems) ..........21 Beschreibung des Motors ......................23 Highlights und Nutzen ....................... 24 2.1.1 Übersicht ........................... - Seite 12 Inhaltsverzeichnis Wartungs- und Inspektionsintervalle ...................56 3.5.1 Sicherheitshinweise zur Instandhaltung ................56 3.5.2 Wartungsarbeiten .......................63 3.5.3 Prüfung des Isolationswiderstands ..................64 3.5.4 Prüf- und Wechselzyklen des Kühlmediums ...............65 Motorkomponenten und Optionen ....................67 Motorkomponenten ......................67 4.1.1 Aufbau des Motors im Überblick ..................67 4.1.1.1 Motoren mit Kühlmantel ......................68 4.1.1.2 Motoren mit integrierter Kühlung ..................69...
- Seite 13 Inhaltsverzeichnis 5.4.6 Kühleranschluss ......................125 5.4.6.1 Kühleranschluss bei Motoren mit Kühlmantel ..............125 5.4.6.2 Kühleranschluss bei Motoren mit integrierter Kühlung ............128 5.4.6.3 Schläuche des Kühlsystems .................... 134 5.4.6.4 Kühlanschlussadapter ..................... 134 5.4.7 Prüfen der Arbeiten ......................136 Technische Daten und Kennlinien ....................137 Erläuterungen........................
- Seite 14 Inhaltsverzeichnis Gekoppelte Motoren ........................237 10.1 Parallelbetrieb von Motoren auf einer Achse ..............237 10.2 Master und Stoker ......................238 10.3 Maschinenkonstruktion und Justage des Phasenwinkels ..........239 10.4 Anschlussbeispiele für den Parallelbetrieb ................241 Anhang ............................. 245 Herstellerempfehlungen ....................245 A.1.1 Bezugsquellen für Anschlussteile und Zubehör für Kühlsysteme ........245 A.1.2 Bezugsquellen für Kühlaggregate ..................246 A.1.3...
-
Seite 15: Grundlegende Sicherheitshinweise
Grundlegende Sicherheitshinweise Allgemeine Sicherheitshinweise WARNUNG Elektrischer Schlag und Lebensgefahr durch weitere Energiequellen Beim Berühren unter Spannung stehender Teile können Sie Tod oder schwere Verletzungen erleiden. • Arbeiten Sie an elektrischen Geräten nur, wenn Sie dafür qualifiziert sind. • Halten Sie bei allen Arbeiten die landesspezifischen Sicherheitsregeln ein. Generell gelten die folgenden Schritte zum Herstellen von Sicherheit: 1. - Seite 16 Grundlegende Sicherheitshinweise 1.1 Allgemeine Sicherheitshinweise WARNUNG Elektrischer Schlag bei beschädigten Motoren oder Geräten Unsachgemäße Behandlung von Motoren oder Geräten kann zu deren Beschädigung führen. Bei beschädigten Motoren oder Geräten können gefährliche Spannungen am Gehäuse oder an freiliegenden Bauteilen anliegen. • Halten Sie bei Transport, Lagerung und Betrieb die in den technischen Daten angegebenen Grenzwerte ein.
- Seite 17 Menschen gefährden oder Sachschäden verursachen. • Wenn Sie den Komponenten näher als ca. 2 m kommen, schalten Sie Funkgeräte oder Mobiltelefone aus. • Benutzen Sie die "SIEMENS Industry Online Support App" nur am ausgeschalteten Gerät. WARNUNG Unerkannte Gefahren durch fehlende oder unleserliche Warnschilder Fehlende oder unleserliche Warnschilder können dazu führen, dass Gefahren unerkannt...
- Seite 18 Grundlegende Sicherheitshinweise 1.1 Allgemeine Sicherheitshinweise WARNUNG Unerwartete Bewegung von Maschinen durch inaktive Sicherheitsfunktionen Inaktive oder nicht angepasste Sicherheitsfunktionen können unerwartete Bewegungen an Maschinen auslösen, die zu schweren Verletzungen oder Tod führen können. • Beachten Sie vor der Inbetriebnahme die Informationen in der zugehörigen Produktdokumentation.
- Seite 19 Grundlegende Sicherheitshinweise 1.1 Allgemeine Sicherheitshinweise WARNUNG Beeinflussung von aktiven Implantaten durch permanentmagnetische Felder Elektromotoren mit Permanentmagneten gefährden, auch im ausgeschalteten Zustand, Personen mit Herzschrittmachern oder Implantaten, die sich in unmittelbarer Nähe der Umrichter/Motoren aufhalten. • Halten Sie als betroffene Person den im Kapitel "Bestimmungsgemäße Verwendung" genannten Abstand ein.
-
Seite 20: Geräteschaden Durch Elektrische Felder Oder Elektrostatische Entladung
Grundlegende Sicherheitshinweise 1.2 Geräteschaden durch elektrische Felder oder elektrostatische Entladung VORSICHT Verbrennung durch heiße Oberflächen Der Motor kann beim Betrieb hohe Temperaturen erreichen und beim Berühren Verbrennungen verursachen. • Montieren Sie den Motor so, dass er im Betrieb nicht zugänglich ist. Maßnahmen im Wartungsfall: •... -
Seite 21: Industrial Security
Security finden Sie unter: Industrial Security (https://www.siemens.com/industrialsecurity) Die Produkte und Lösungen von Siemens werden ständig weiterentwickelt, um sie noch sicherer zu machen. Siemens empfiehlt ausdrücklich, Produkt-Updates anzuwenden, sobald sie zur Verfügung stehen und immer nur die aktuellen Produktversionen zu verwenden. Die Verwendung veralteter oder nicht mehr unterstützter Versionen kann das Risiko von Cyber-... - Seite 22 Grundlegende Sicherheitshinweise 1.3 Industrial Security WARNUNG Unsichere Betriebszustände durch Manipulation der Software Manipulationen der Software, z. B. Viren, Trojaner oder Würmer, können unsichere Betriebszustände in Ihrer Anlage verursachen, die zu Tod, schwerer Körperverletzung und zu Sachschäden führen können. • Halten Sie die Software aktuell. •...
-
Seite 23: Restrisiken Von Antriebssystemen (Power Drive Systems)
Grundlegende Sicherheitshinweise 1.4 Restrisiken von Antriebssystemen (Power Drive Systems) Restrisiken von Antriebssystemen (Power Drive Systems) Der Maschinenhersteller oder Anlagenerrichter muss bei der gemäß entsprechenden lokalen Vorschriften (z. B. EG-Maschinenrichtlinie) durchzuführenden Beurteilung des Risikos seiner Maschine bzw. Anlage folgende von den Komponenten für Steuerung und Antrieb eines Antriebssystems ausgehende Restrisiken berücksichtigen: 1. - Seite 24 Grundlegende Sicherheitshinweise 1.4 Restrisiken von Antriebssystemen (Power Drive Systems) 5. Freisetzung umweltbelastender Stoffe und Emissionen bei unsachgemäßem Betrieb und/oder bei unsachgemäßer Entsorgung von Komponenten 6. Beeinflussung von netzgebundenen Kommunikationssystemen, z. B. Rundsteuersendern oder Datenkommunikation über das Netz Weitergehende Informationen zu den Restrisiken, die von den Komponenten eines Antriebssystems ausgehen, finden Sie in den zutreffenden Kapiteln der technischen Anwenderdokumentation.
-
Seite 25: Beschreibung Des Motors
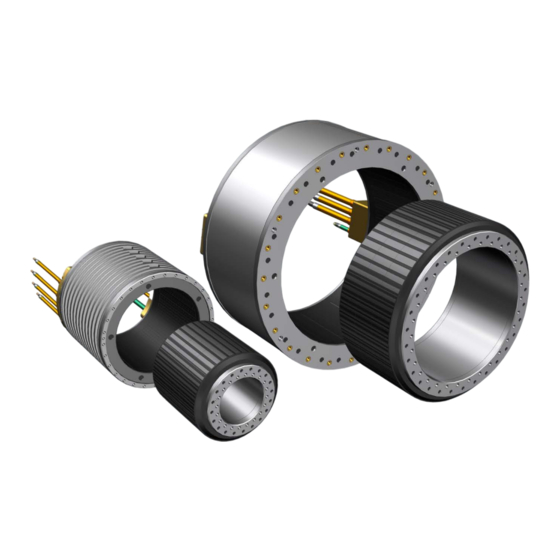
Beschreibung des Motors Einbau-Torquemotor 1FW6 High Speed Bild 2-1 Einbau-Torquemotoren 1FW6 High Speed mit Kühlmantel (links) und mit integrierter Kühlung (rechts) Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... -
Seite 26: Highlights Und Nutzen
2.1 Highlights und Nutzen Highlights und Nutzen 2.1.1 Übersicht Die Einbau-Torquemotoren SIMOTICS T-1FW6 High Speed sind als Einbaumotoren für den Einsatz in höher drehenden Direktantrieben konzipiert. Diese Einbau-Torquemotoren sind flüssigkeitsgekühlte, hochpolige permanenterregte Drehstrom-Synchronmotoren mit Hohlwellenläufer. Die Motoren werden als Ein- baukomponenten geliefert. -
Seite 27: Nutzen
Konstruktion bestimmt. Eine für alle Achskonzepte gültige, pauschale Empfehlung zur Integration des Motors kann daher nicht angegeben werden. Siemens bietet zur Sicherstellung der optimalen Integration des Motors und Gebers in die mechanische Konstruktion die Dienstleistung Application & Mechatronic Support Direct Motors, siehe Katalog. -
Seite 28: Bestimmungsgemäße Verwendung
Motoren nicht ausdrücklich hierfür vorgesehen sind. Beachten Sie gegebenenfalls gesondert beigefügte Zusatzhinweise. • Verwenden Sie Direktantriebe und deren Komponenten nur für die von Siemens angegebenen Einsatzfälle. • Schützen Sie die Motoren vor Verschmutzung und Kontakt mit aggressiven Stoffen. -
Seite 29: Technische Merkmale Und Umweltbedingungen
Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen WARNUNG Personen- und Sachschäden durch Missachtung der Maschinenrichtlinie 2006/42/EG Wenn Sie die Maschinenrichtlinie 2006/42/EG missachten, besteht die Gefahr von Tod, schwerer Körperverletzung und/oder Sachschaden. • Die gelieferten Produkte sind ausschließlich zum Einbau in eine Maschine bestimmt. Die Inbetriebnahme ist so lange untersagt, bis die Konformität des Endprodukts mit der Maschinenrichtlinie 2006/42/EG festgestellt ist. - Seite 30 Die Motorenreihe SIMOTICS fällt nicht in den Anwendungsbereich der China Compulsory Certification (CCC). CCC-Negativbescheinigung: CCC Produktzulassung (https://support.industry.siemens.com/cs/products?search=CCC&dtp=Certificate&mfn=ps&o =DefaultRankingDesc&pnid=13347&lc) China RoHS Die Motorenreihe SIMOTICS erfüllt die China RoHS. Weitere Informationen finden Sie unter: China RoHS (https://support.industry.siemens.com/cs/ww/de/view/109738656) Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 31 Inhalte des Angebots und das Vorhandensein des cUL- Zeichens auf dem Leistungsschild (Typenschild) zu achten! Qualitätssysteme Die Siemens AG setzt ein Qualitätsmanagementsystem ein, das die Anforderungen von ISO 9001 und ISO 14001 erfüllt. Zertifikate zur Motorenreihe SIMOTICS können unter folgendem Link aus dem Internet heruntergeladen werden: Zertifikate für SIMOTICS-Motoren...
-
Seite 32: Gefahren Durch Starke Magnetfelder
Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen 2.3.2 Gefahren durch starke Magnetfelder Auftreten von Magnetfeldern Bei Komponenten des Motors, die Permanentmagnete enthalten, treten sehr starke Magnetfelder auf. Die magnetische Feldstärke der Motoren resultiert im stromlosen Zustand ausschließlich aus den Magnetfeldern der Komponenten mit Permanentmagneten. Während des Betriebs treten zusätzlich elektromagnetische Felder auf. -
Seite 33: Gefährdung Von Personen Durch Starke Magnetfelder
Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen Gefährdung von Personen durch starke Magnetfelder WARNUNG Lebensgefahr durch permanentmagnetische Felder Die Permanentmagnete der Motoren gefährden auch im ausgeschalteten Zustand Personen mit aktiven Körperhilfsmitteln in unmittelbarer Nähe der Motoren. Beispiele für aktive Körperhilfsmittel sind: Herzschrittmacher, Insulinpumpen. •... - Seite 34 Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen WARNUNG Quetschgefahr durch die Permanentmagnete der Läufer Die Anziehungskräfte der magnetischen Läufer wirken auf magnetisierbare Materialien. Im Nahbereich der Läufer steigen die Anziehungskräfte stark an. Die Auslöseschwelle von 3 mT für ein Verletzungsrisiko durch Anziehung und Projektilwirkung wird bei einem Abstand von 100 mm erreicht (Richtlinie 2013/35/EU).
- Seite 35 Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen Hinweis Fügevorrichtung Wegen der Vielzahl von Einbausituationen und Einbaurandbedingungen ist die Vorgabe einer generellen Fügevorrichtung nicht möglich. Sofortmaßnahmen bei Unfällen mit Permanentmagneten ● Bewahren Sie Ruhe! ● Wenn die Maschine unter Spannung steht, drücken Sie den NOT-HALT-Schalter und schalten Sie gegebenenfalls den Hauptschalter aus.
-
Seite 36: Technische Merkmale
Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen 2.3.3 Technische Merkmale Hinweis Die genannten Werte in der nachfolgenden Tabelle gelten nur in Verbindung mit den in Kapitel "Systemeinbindung" beschriebenen Systemvoraussetzungen. Tabelle 2- 1 Standardausführung des Einbau-Torquemotors 1FW6 High Speed Technisches Merkmal Ausführung Motorart Synchronmotor mit Permanentmagnetläufer hochpolig... - Seite 37 Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen Technisches Merkmal Ausführung Anschluss, elektrisch Leitungsabgang: Baugröße 1FW6092 und 1FW6152 mit axialem Leitungsab- • gang Baugröße 1FW6192 mit axialem oder radialem Leitungsab- • gang nach außen Anschlussart: Fest angeschlossene Leistungsleitungen als Einzeladern mit •...
-
Seite 38: Feststellen Des Drehsinns
Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen 2.3.4 Feststellen des Drehsinns Drehrichtung Wenn der Einbau-Torquemotor mit Phasenfolge U-V-W angeschlossen ist und von einem Drehstromsystem mit Rechtsdrehfeld bestromt wird, dreht sich der Läufer im Uhrzeigersinn (Rechtslauf). Sie können den Drehsinn feststellen, indem Sie auf die A-Seite des Einbau- Torquemotors schauen. - Seite 39 Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen Die Motoren können Sie mit Ausnahme der Umwelteinflussgrößen "Niedrige Lufttemperatur" und "Niedriger Luftdruck" der Klimaklasse 3K3 zuordnen. Tabelle 2- 2 Umweltbedingungen in Anlehnung an Klimaklasse 3K3 Umwelteinflussgröße Einheit Wert Niedrige Lufttemperatur °C Hohe Lufttemperatur °C + 40...
-
Seite 40: Lieferumfang
Beschreibung des Motors 2.3 Technische Merkmale und Umweltbedingungen 2.3.6 Lieferumfang 2.3.6.1 Einbau-Torquemotor mit Kühlmantel ● Ständer mit – Kühlmantel – fest angeschlossenen Leistungsleitungen als Einzeladern mit offenen Aderenden – Signalleitungen mit offenen Aderenden ● Läufer ● Distanzfolie ● Runddichtringe (Anzahl: 2) ●... -
Seite 41: Deratingfaktoren
Beschreibung des Motors 2.4 Deratingfaktoren Tabelle 2- 4 Mitgelieferte Verbotsschilder nach BGV A8 und DIN EN ISO 7010 und ihre Bedeutung Schild Bedeutung Schild Bedeutung Kein Zutritt für Kein Zutritt für Personen mit Personen mit Herzschrittmachern Implantaten aus Metall oder implantierten (P014) Defibrillatoren (P007) -
Seite 42: Auswahl- Und Bestelldaten
Beschreibung des Motors 2.5 Auswahl- und Bestelldaten Auswahl- und Bestelldaten 2.5.1 Bestellbezeichnung Als Bestellbezeichnung dient die Artikelnummer. Die Artikelnummer besteht aus einer Kombination von Buchstaben und Ziffern. Für eine Bestellung ist die Angabe der eindeutigen Artikelnummer ausreichend. Die Artikelnummer besteht aus drei Blöcken, die durch Bindestriche getrennt sind. Der erste Block umfasst sieben Stellen und kennzeichnet den Motortyp (1FW6), die Baugröße und die Art der Kühlung. -
Seite 43: Einbau-Torquemotor 1Fw6 High Speed
Beschreibung des Motors 2.5 Auswahl- und Bestelldaten 2.5.1.1 Einbau-Torquemotor 1FW6 High Speed Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... -
Seite 44: Ständer Als Einzelkomponente 1Fw6 High Speed
Beschreibung des Motors 2.5 Auswahl- und Bestelldaten 2.5.1.2 Ständer als Einzelkomponente 1FW6 High Speed Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... -
Seite 45: Läufer Als Einzelkomponente
Beschreibung des Motors 2.5 Auswahl- und Bestelldaten 2.5.1.3 Läufer als Einzelkomponente Hinweis Beim Lufttransport von Läufern müssen die IATA-Vorschriften beachtet werden. 2.5.1.4 Bestellhinweise Sie können den Einbau-Torquemotor (Ständer, Läufer) über eine einzige Bestellbezeichnung (Artikelnummer) beziehen. Ersatzteile und Zubehör sind über jeweils eigene Bestellbezeichnungen bestellbar (siehe "Bestellbeispiele (Seite 44)"). -
Seite 46: Bestellbeispiele
Beschreibung des Motors 2.5 Auswahl- und Bestelldaten 2.5.1.5 Bestellbeispiele Beispiel 1: Ständer und Läufer, Kühlmantel; Leitungsabgang axial, für Antriebssystem SINAMICS S120 Motor Module 60 A Bemessungsstrom: Artikelnummer 1FW6092–2PC15–6AB3 Beispiel 2: Ständer und Läufer, integrierte Kühlung; Leitungsabgang radial nach außen, für Antriebssystem SINAMICS S120 Motor Module 85 A Bemessungsstrom: Artikelnummer 1FW6192–2VC05–8FB3 Beispiel 3:... - Seite 47 Beschreibung des Motors 2.5 Auswahl- und Bestelldaten Tabelle 2- 6 Einbau-Torquemotoren Übersicht Teil 1 von 2 Bestellbezeichnung / Bemessungs- Maximal- Bemessungs- Maximalstrom Bemessungs- Maximale moment moment M strom drehzahl Drehzahl Baugröße in Nm in Nm in A in A in min bei Maximal- moment MAX,MMAX...
-
Seite 48: 2.6 Leistungsschildangaben
Beschreibung des Motors 2.6 Leistungsschildangaben Tabelle 2- 7 Einbau-Torquemotoren Übersicht Teil 2 von 2 Bestellbezeichnung / Bemessungs- Außen- Innen- Ständer Motor Masse Trägheits- Baugröße verlustleis- durchmesser durchmesser Länge moment in kg tung Ständer Läufer Läufer J in mm in kW in mm in mm in 10... - Seite 49 Beschreibung des Motors 2.6 Leistungsschildangaben Bild 2-5 Beispiel für ein Leistungsschild für Einbau-Torquemotoren 1FW6 High Speed Tabelle 2- 8 Elemente auf dem Leistungsschild für Einbau-Torquemotoren 1FW6 High Speed Position Beschreibung Artikel-Nr. Seriennummer 2D-Code, beinhaltet die Motordaten Bemessungsdrehzahl n Approbationen Maximaldrehzahl n Wärmeklasse Bemessungsstrom I Temperatursensoren...
- Seite 50 Beschreibung des Motors 2.6 Leistungsschildangaben Bild 2-6 Beispiel für ein Typenschild für Läufer 1FW6 High Speed Tabelle 2- 9 Elemente auf dem Typenschild für Läufer Position Beschreibung Artikel-Nr. 2D-Code Masse Seriennummer Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 51: Mechanische Eigenschaften
Mechanische Eigenschaften Kühlung Eine Wasserkühlung führt die von der Ständerwicklung erzeugte Verlustwärme ab. ● Schließen Sie die Kühlkanäle an den Kühlkreislauf eines Kühlaggregats an. Sie finden Kennlinien zum Druckabfall des Kühlmediums zwischen Vorlauf und Rücklauf der Kühler in Abhängigkeit vom Volumenstrom im Kapitel "Technische Daten und Kennlinien". Bei bestimmten Betriebszuständen müssen Sie mit einer zusätzlichen Erwärmung des Läufers durch Eisenverluste rechnen, z. -
Seite 52: Kühlkreisläufe
Mechanische Eigenschaften 3.1 Kühlung 3.1.1 Kühlkreisläufe Anforderungen an die Kühlkreisläufe Sie vermeiden Algenwachstum, indem Sie geeignete chemische Zusätze und lichtundurchlässige Schläuche einsetzen. Wir empfehlen Ihnen, die Kühlkreisläufe als geschlossene Systeme auszuführen. Der maximal zulässige Druck beträgt 10 bar. ACHTUNG Verstopfung der Kühlkreisläufe Durch Verschmutzungen und Langzeitablagerungen können die Kühlkreisläufe verstopfen. -
Seite 53: Berechnung Der Vom Kühler Abführbaren Wärmeleistung
Mechanische Eigenschaften 3.1 Kühlung ACHTUNG Korrosion durch ungeeignete Materialien beim Kühleranschluss Wenn Sie ungeeignete Materialien beim Kühleranschluss verwenden, können Schäden durch Korrosion auftreten. • Wir empfehlen für den Kühleranschluss Materialien aus Messing oder Edelstahl. Berechnung der vom Kühler abführbaren Wärmeleistung mittlere Dichte des Kühlmittels: ρ... -
Seite 54: Dimensionierung Des Kühlsystems
Mechanische Eigenschaften 3.1 Kühlung Bild 3-1 Einfluss der Kühlmittel-Vorlauftemperatur Kühlaggregate Stellen Sie die Vorlauftemperatur von 20 °C sicher, indem Sie ein Kühlaggregat einsetzen. Der Betrieb mehrerer Motoren an einem Kühlaggregat ist möglich. Die Kühlaggregate gehören nicht zum Lieferumfang. Die Kühlleistung berechnet sich aus der Summe der Verlustleistungen der angeschlossenen Motoren. -
Seite 55: Kühlmedien
Wenn Sie Öl als Kühlmedium einsetzen, kann sich die vom Kühler abführbare Wärmeleistung verringern. Reduzieren Sie entsprechend die Leistung des Motors. Wenden Sie sich für Fragen an Ihre zuständige Siemens-Niederlassung. Begründung für den Einsatz von Wasser mit Korrosionsschutzmittel Bei Einsatz von unbehandeltem Wasser kann es aufgrund von Härteablagerungen, Algen- und Schleimbildungen sowie Korrosion zu erheblichen Schäden und Störungen kommen,... -
Seite 56: Anforderungen An Das Korrosionsschutzmittel
Mechanische Eigenschaften 3.2 Schutzart Anforderungen an das Korrosionsschutzmittel Das Korrosionsschutzmittel muss folgende Anforderungen erfüllen: ● Basis ist Ethylenglykol (auch "Ethandiol"). ● Wasser und Korrosionsschutzmittel entmischen sich nicht. ● Der Gefrierpunkt des verwendeten Wassers wird mindestens auf -5 °C herabgesetzt. ● Das verwendete Korrosionsschutzmittel muss mit den verwendeten Fittings und Schläuchen des Kühlsystems sowie den Materialien des Motorkühlers verträglich sein. -
Seite 57: Schwingungsverhalten
Mechanische Eigenschaften 3.3 Schwingungsverhalten Eindringende Flüssigkeiten können die Isolationsfestigkeit des Ständers herabsetzen. Die thermischen Eigenschaften des Motors werden durch eingedrungene Flüssigkeiten und Fremdkörpern beeinflusst. Die Einbau-Torquemotoren 1FW6 sind in der Schutzart IP23 ausgeführt. Schwingungsverhalten Das sich im Betrieb von Einbaumotoren einstellende Schwingungsverhalten hängt im Wesentlichen von der Maschinenkonstruktion und der Applikation ab. -
Seite 58: Wartungs- Und Inspektionsintervalle
Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle Wartungs- und Inspektionsintervalle 3.5.1 Sicherheitshinweise zur Instandhaltung WARNUNG Verletzungsgefahr durch ungewollte Drehbewegungen Wenn Sie bei eingeschalteter Maschine im Drehbereich des Motors arbeiten und der Motor sich ungewollt dreht, besteht die Gefahr von Tod, Körperverletzung und/oder Sachschaden. •... - Seite 59 Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle WARNUNG Quetschgefahr durch die Permanentmagnete der Läufer Die Anziehungskräfte der magnetischen Läufer wirken auf magnetisierbare Materialien. Im Nahbereich der Läufer steigen die Anziehungskräfte stark an. Die Auslöseschwelle von 3 mT für ein Verletzungsrisiko durch Anziehung und Projektilwirkung wird bei einem Abstand von 100 mm erreicht (Richtlinie 2013/35/EU).
- Seite 60 Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle Hinweis Fügevorrichtung Wegen der Vielzahl von Einbausituationen und Einbaurandbedingungen ist die Vorgabe einer generellen Fügevorrichtung nicht möglich. WARNUNG Verbrennungsgefahr beim Berühren heißer Oberflächen Unmittelbar nach dem Betrieb des Motors besteht beim Berühren heißer Oberflächen Verbrennungsgefahr.
- Seite 61 Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle WARNUNG Lebensgefahr durch das Bersten des Kühlsystems Wenn ein Motor ohne Kühlung betrieben wird, überhitzt der Motor. Wenn Kühlwasser in die heiße Maschine fließt, entwickelt sich schlagartig heißer Dampf mit hohem Druck. Dadurch kann das Kühlwassersystem bersten und den Tod, schwere Körperverletzung und Sachschäden verursachen.
- Seite 62 Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle WARNUNG Gefahr durch elektrischen Schlag Jede Bewegung des Läufers gegenüber dem Ständer und umgekehrt führt zu einer induzierten Spannung an den Leitungsanschlüssen des Ständers. Bei eingeschaltetem Motor stehen die Leitungsanschlüsse des Ständers ebenfalls unter Spannung.
- Seite 63 Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle WARNUNG Gefahr durch elektrischen Schlag bei Restspannungen Wenn an den Anschlüssen von Motoren gefährliche Restspannungen anliegen, können Sie einen elektrischen Schlag erleiden. Aktive Teile des Motors können beim Abschalten der Spannungsversorgung eine Ladung von mehr als 60 μC aufweisen. Zusätzlich kann an freiliegenden Leitungsenden z .B.
- Seite 64 Werden von Ihnen oder von Dritten unsachgemäß Änderungen oder Instandsetzungsarbeiten an den Vertragsgegenständen vorgenommen, so bestehen für diese und die daraus entstehenden Folgen gegenüber Siemens weder Schadenersatzansprüche aufgrund von Personenschäden noch Sachmängelansprüche. Für Fragen stehen Ihnen unsere Siemens-Servicezentren zur Verfügung. Adressen von Siemens-Servicezentren finden Sie unter http://www.siemens.com/automation/service&support VORSICHT Scharfe Kanten und herunterfallende Gegenstände...
-
Seite 65: Wartungsarbeiten
Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle 3.5.2 Wartungsarbeiten Wartungsarbeiten am Motor Hinweis Beachten Sie unbedingt die Sicherheitshinweise dieser Dokumentation. Die Motoren sind durch ihre Funktionsweise grundsätzlich verschleißfrei. Um die Funktion und Verschleißfreiheit des Motors sicherzustellen, sind folgende Wartungsarbeiten notwendig: ● Überprüfen Sie regelmäßig die Freigängigkeit der Drehachse. ●... -
Seite 66: Prüfung Des Isolationswiderstands
• Messen Sie den Isolationswiderstand gegen den PE-Anschluss oder das Motorgehäuse. • Wenn für die Maschinen-/Anlagenprüfung eine höhere Gleichspannung oder Wechsel- spannung nötig ist, stimmen Sie diese Prüfung mit Ihrer zuständigen Siemens- Niederlassung ab! • Beachten Sie die Bedienungsanleitung des Prüfgerätes! Prüfungen des Isolationswiderstands an einzelnen Motoren dürfen Sie ausschließlich wie... -
Seite 67: Prüf- Und Wechselzyklen Des Kühlmediums
Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle 3.5.4 Prüf- und Wechselzyklen des Kühlmediums Prüf - und Wechselzyklen des Kühlmediums Prüf- und Wechselzyklen des Kühlmediums sind mit dem Hersteller des Kühlgerätes und mit dem Hersteller des Korrosionsschutzmittels abzustimmen. Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 68 Mechanische Eigenschaften 3.5 Wartungs- und Inspektionsintervalle Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 69: Motorkomponenten Und Optionen
Motorkomponenten und Optionen Motorkomponenten 4.1.1 Aufbau des Motors im Überblick Der Einbau-Torquemotor besteht aus den folgenden Komponenten: ● Ständer (Stator) Der Ständer besteht aus einem Eisenkern und einer 3-Phasen-Drehstromwicklung. Zur besseren Abfuhr der Verlustwärme ist die Wicklung vergossen. Der Motor ist für Flüssigkeitskühlung mit Wasser als Kühlmedium (Hauptkühler) vorgesehen. -
Seite 70: Motoren Mit Kühlmantel
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.1.1 Motoren mit Kühlmantel Die Kühlmantelfläche des Motors besteht aus ringförmigen Nuten, die mit einer ent- sprechend vom Maschinenhersteller vorzubereitenden Umgebungskonstruktion einen geschlossenen Flüssigkeits-Kühlkreislauf bilden. Der Vor- und Rücklauf des Kühlmediums muss vom Maschinenhersteller an der Um- gebungskonstruktion vorgesehen werden. -
Seite 71: Motoren Mit Integrierter Kühlung
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.1.2 Motoren mit integrierter Kühlung Motoren mit integrierter Zweikreis-Kühlung Diese Motoren besitzen ein anschlussfertiges integriertes Zweikreis-Kühlsystem und sind dadurch thermisch weitgehend gegenüber der mechanischen Achskonstruktion isoliert. Das Zweikreis-Kühlsystem besteht aus Haupt- und Präzisionskühler nach dem Prinzip Thermo-Sandwich®. -
Seite 72: Ausführung Der Kühlart
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.1.3 Ausführung der Kühlart Der Ständer der Einbau-Torquemotoren besitzt einen Flüssigkeitskühler zur Abführung der Verlustwärme. Die Ausführung der Kühlart hängt wie folgt von der Baugröße (Außendurchmesser) des Motors ab. Tabelle 4- 1 Ausführung der Kühlart Baugröße Kühlmantel Integrierte Kühlung... - Seite 73 Motorkomponenten und Optionen 4.1 Motorkomponenten Die drei PTC-Temperatursensoren (Kaltleiter–Temperatursensoren) dieses Temperaturüberwachungskreises sind zu einem PTC-Drilling in Reihe geschaltet. Bild 4-3 PTC-Drilling ● 1 x PTC 130 °C-Temperatursensor je Phasenwicklung U, V und W, Ansprechschwelle bei 130 °C in jeder Teilwicklung für Motoren mit doppeltem Leistungsanschluss Die beiden PTC-Temperatursensor-Drillinge (Kaltleiter–Temperatursensoren) der beiden Teilwicklungen dieses Temperaturüberwachungskreises sind in Reihe geschaltet.
- Seite 74 Motorkomponenten und Optionen 4.1 Motorkomponenten ACHTUNG Zerstörung des Motors durch Übertemperatur Wenn die Motorwicklung überhitzt, kann der Motor zerstört werden. • Schließen Sie Temp-S an. • Werten Sie Temp-S aus. • Stellen Sie sicher, dass die Abschaltzeit nicht überschritten wird. Hinweis Keine Temperaturbeobachtung mit Temp-S Die PTC-Temperatursensoren (Kaltleiter-Temperatursensoren) sind wegen ihrer nicht...
-
Seite 75: Kein Direkter Anschluss Der Temperaturüberwachungskreise
Motorkomponenten und Optionen 4.1 Motorkomponenten Kein direkter Anschluss der Temperaturüberwachungskreise WARNUNG Gefahr durch elektrischen Schlag bei falschem Anschluss der Temperaturüberwachungskreise Die Stromkreise von Temp-S und Temp-F bieten im Fehlerfall keine sichere elektrische Trennung gegenüber den Leistungsstromkreisen. • Verwenden Sie für den Anschluss der Temperaturüberwachungskreise Temp-S und Temp-F z. -
Seite 76: Technische Eigenschaften Der Temperatursensoren
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.2.2 Technische Eigenschaften der Temperatursensoren Technische Eigenschaften der PTC-Temperatursensoren Jeder PTC-Temperatursensor besitzt eine "quasi-schaltende" Charakteristik. Im Bereich der Ansprechschwelle (Nennansprechtemperatur ϑ ) steigt der Widerstand sprunghaft an. Die PTC-Temperatursensoren haben eine geringe Wärmekapazität und einen guten thermischen Kontakt zur Motorwicklung. -
Seite 77: Technische Eigenschaften Des Pt1000-Temperatursensors
Motorkomponenten und Optionen 4.1 Motorkomponenten Bei Motoren mit doppeltem Leistungsanschluss sind die PTC-Drillinge der beiden Teilwicklungen in Reihe geschaltet. Welche Motoren betroffen sind, finden Sie im Kapitel "Schaltbild des Motors (Seite 206)". Technische Eigenschaften des Pt1000-Temperatursensors Der Pt1000 hat eine lineare Temperaturwiderstands-Kennlinie. Außerdem besitzt der Pt1000 eine geringe Wärmekapazität und einen guten thermischen Kontakt zur Motorwicklung. -
Seite 78: Geber
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.3 Geber Hinweis Siemens bietet die Dienstleistung Application & Mechatronic Support Direct Motors Wenn Sie zu folgenden Themen mechatronischen Support benötigen, wenden Sie sich an Ihre zuständige Siemens-Niederlassung: • Mechanische Ausführung der Maschine • Einzusetzende Regelungstechnik •... - Seite 79 Motorkomponenten und Optionen 4.1 Motorkomponenten Beachten Sie die Dokumentation des verwendeten Antriebssystems und die Dokumentation des Geberherstellers. Am Markt verfügbare Gebersysteme setzen unterschiedliche Abtastprinzipien ein (magnetisch, induktiv, optisch, …). Hochauflösende optische oder magnetische Systeme müssen in diesem Zusammenhang einen Strichabstand (bzw. eine Gitterteilung) von maximal 0,04 mm am Umfang auf der Maßverkörperung aufweisen.
- Seite 80 Eine für alle Gebertypen und Achskonzepte gültige, pauschale Empfehlung zur Integration des Gebers kann daher nicht angegeben werden. Siemens bietet zur Sicherstellung der optimalen Integration des Gebers in die mechanische Konstruktion die Dienstleistung Application & Mechatronic Support Direct Motors, siehe Katalog.
- Seite 81 Motorkomponenten und Optionen 4.1 Motorkomponenten Bild 4-6 Einbau-Montageschema (Beispiel) Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 82: Lager
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.4 Lager Lagerauswahl 1FW6–Torquemotoren sind Einbaumotoren für direkt angetriebene Rotations- oder Schwenkachsen. Für den Aufbau einer kompletten Antriebseinheit ist neben dem Winkelgebersystem ein Lager zwischen Ständer und Läufer erforderlich. Die Lagerauswahl wird von folgenden Faktoren bestimmt: ●... -
Seite 83: Bremskonzepte
Motorkomponenten und Optionen 4.1 Motorkomponenten 4.1.5 Bremskonzepte WARNUNG Unkontrolliertes Austrudeln des Antriebs durch Betriebsstörungen Betriebsstörungen an einer rotierenden Maschinenachse können zu unkontrolliertem Austrudeln des Antriebs führen. • Treffen Sie Maßnahmen, die den Antrieb bei maximal möglicher kinetischer Energie im Störungsfall abbremsen. Die Auslegung von mechanischen Bremssystemen hängt von der maximalen kinetischen Energie, also dem maximalen Trägheitsmoment der rotierenden Massen und seiner maximalen Drehzahl, ab. -
Seite 84: Brems- Und Nothaltkonzepte
Motorkomponenten und Optionen 4.1 Motorkomponenten Brems- und Nothaltkonzepte Bei rotierenden Achsen, die auf einen Drehwinkel < 360° eingeschränkt sind, können als verlässliche Schutzmaßnahme Dämpfungs- und Stoßverzehrelemente an den Enden des Drehbereichs verwendet werden. Um die kinetische Energie der rotierenden Masse abzuführen, bevor sie auf die Dämpfungs- elemente stößt, sollten zur Unterstützung von mechanischen Bremssystemen folgende Maßnahmen ergriffen werden: 1. -
Seite 85: Einsatz Einer Haltebremse
Motorkomponenten und Optionen 4.1 Motorkomponenten Einsatz einer Haltebremse Torquemotoren können aufgrund von Rastmomenten in eine magnetische Vorzugslage gezogen werden, wenn der Motor nicht mehr vom Antrieb gespeist wird. Dabei können bei bereits stillstehendem Antrieb unvorhersehbare Bewegungen bis zu einer halben Magnetpolteilung in beide Richtungen auftreten. -
Seite 86: Optionen
Motorkomponenten und Optionen 4.2 Optionen Optionen 4.2.1 Runddichtring (O-Ring) 4.2.2 Kühlanschlussadapter Hinweis Der Kühlanschlussadapter ist eine Option und passt nur bei Einbau-Torquemotoren mit integrierter Kühlung für die Baugrößen 19 und 23. Bitte bei Bedarf bestellen. Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... -
Seite 87: Motorkomponenten Und Optionen
Motorkomponenten und Optionen 4.2 Optionen 4.2.3 Steckverbinder Steckerart Steckergröße Artikel-Nr. Signalanschluss 6FX2003-0SU07 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 88 Motorkomponenten und Optionen 4.2 Optionen Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 89: Projektierung
Projektierung Hinweis Siemens bietet die Dienstleistung Application & Mechatronic Support Direct Motors Wenn Sie zu folgenden Themen mechatronischen Support benötigen, wenden Sie sich an Ihre zuständige Siemens-Niederlassung: • Mechanische Ausführung der Maschine • Einzusetzende Regelungstechnik • Geberauflösung und Messgenauigkeit des Gebers •... -
Seite 90: Antriebs-/Inbetriebnahmesoftware Starter
● Kennlinien ● Aussagen zu Netzrückwirkungen ● Aufbauinformationen der Antriebs- und Steuerungskomponenten ● Energiebetrachtungen der projektierten Antriebssysteme Weitere Informationen und die Möglichkeit zum Download finden Sie im Internet unter SIZER (https://support.industry.siemens.com/cs/document/54992004/sizer-for-siemens- drives?dti=0&pnid=13434&lc=de-WW). 5.1.2 Antriebs-/Inbetriebnahmesoftware STARTER Das Inbetriebnahme-Tool STARTER bietet ● Inbetriebnahme ●... - Seite 91 Projektierung 5.2 Projektierungsablauf Ablauf In der Regel ist der Prozess der Motorauswahl ein iterativer Vorgang, da gerade bei hochdy- namischen Direktantrieben der Motortyp selbst durch seine Eigenträgheit die benötigten Drehmomente mitbestimmt. Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 92: Mechanische Randbedingungen
Projektierung 5.2 Projektierungsablauf 5.2.1 Mechanische Randbedingungen Trägheitsmoment Die kinetische Energie eines rotierenden Körpers ist direkt proportional zu seinem Trägheits- moment J in kgm . Das Trägheitsmoment berücksichtigt die rotierende Masse und ihre räumliche Verteilung über das ganze Körpervolumen in Bezug auf die Drehachse. Die rotierende Masse setzt sich aus der Masse der zu drehenden mechanischen Struktur (z.B. -
Seite 93: Vorgabe Des Lastspiels
Projektierung 5.2 Projektierungsablauf 5.2.2 Vorgabe des Lastspiels Dauerbetrieb S1 Beim Dauerbetrieb S1 läuft der Motor permanent und mit einer konstanten Belastung. Die Dauer der Belastung reicht aus, um das thermische Gleichgewicht zu erreichen. Für die Auslegung des Motors bei Dauerbetrieb sind die Bemessungsdaten relevant. ACHTUNG Überlastung des Motors Eine zu hohe Belastung kann zur Abschaltung oder bei nicht korrekt ausgewerteten... - Seite 94 Projektierung 5.2 Projektierungsablauf Beispiel Ein Motor soll aus dem kalten Zustand mit Maximalstrom betrieben werden. ● I = 47 A, I = 26 A; hieraus ergibt sich ν = 3,268 ● t = 180 s Der Motor darf maximal 66 s mit dem Maximalstrom betrieben werden. Aussetzbetrieb S3 Beim Aussetzbetrieb S3 wechseln in periodischer Folge Belastungszeiten Δt konstantem Strom und Stillstandszeiten Δt...
-
Seite 95: Bedeutung Des Lastspiels
Projektierung 5.2 Projektierungsablauf Hierbei sollte die Spieldauer nicht länger als 10 % der thermischen Zeitkonstanten t sein. Ist eine längere Spieldauer nötig, wenden Sie sich bitte an Ihre zuständige Siemens- Niederlassung. Beispiel Bei einer thermischen Zeitkonstanten t = 180 s ergibt sich für die maximal zulässige Spieldauer = 0,1 ·... -
Seite 96: Drehmoment-Zeit-Diagramm
Projektierung 5.2 Projektierungsablauf Beispiel Bild 5-2 Beispiel für ein Lastspiel mit Drehzahl-Zeit-Diagramm n(t), daraus abgeleitetem Winkel- beschleunigung-Zeit-Diagramm α(t) und dem Bearbeitungsmoment-Zeit-Diagramm M 5.2.3 Drehmoment-Zeit-Diagramm Erforderliches Motormoment Das erforderliche Motormoment M ist zu jedem Zeitpunkt die Summe der Einzelmomente. Dabei ist auf die korrekte Berücksichtigung der Vorzeichen der Drehmomente zu achten. : Beschleunigungsmoment : Bearbeitungsmoment : Reibmoment... -
Seite 97: Bestimmung Des Erforderlichen Motormoments
Projektierung 5.2 Projektierungsablauf Bestimmung des erforderlichen Motormoments Der zeitliche Verlauf der Reibmomente kann auf Basis des Drehzahlverlaufs ermittelt wer- den. Mit Hilfe der Summenformel kann anschließend das Motormoment-Zeit-Diagramm erstellt werden (siehe nachfolgendes Bild), aus dem das erforderliche Spitzendrehmoment direkt abgelesen werden kann. mMAX Bild 5-3 Auftretende Einzelmomente und das daraus resultierende erforderliche Motormoment M... -
Seite 98: Auswahl Der Motoren
Projektierung 5.2 Projektierungsablauf Neben dem Spitzendrehmoment M ist das erforderliche Effektivmoment M mMAX Lastspiels des Motors für die Dimensionierung des Motors Ausschlag gebend. Das für die Erwärmung des Motors maßgebliche Effektivmoment M des Lastspiels kann durch quadratische Mittelwertbildung aus dem Motormoment-Zeit-Diagramm abgeleitet werden und darf das Bemessungsmoment M nicht überschreiten. -
Seite 99: Ungleichmäßige Strombelastung
70 % des Bemessungsmoments betrieben werden, siehe auch M * im Kapitel "Technische Daten und Kennlinien". Für genaue Auslegungen wenden Sie sich bitte an Ihre zuständige Siemens-Niederlassung. Hinweis Ungleichmäßige Strombelastung Nicht in allen Betriebszuständen des Motors sind alle drei Phasen gleichmäßig mit Strom belastet! Beispiele für ungleichmäßige Strombelastung:... -
Seite 100: Motormoment-Drehzahl-Diagramm
Projektierung 5.2 Projektierungsablauf 5.2.6 Motormoment-Drehzahl-Diagramm Momente und Drehzahlen überprüfen Das maximal verfügbare Motormoment wird bei hohen Drehzahlen durch die Höhe der zur Verfügung stehenden Zwischenkreisspannung begrenzt. Die im Bewegungsablauf auftretenden Drehzahlen können größer sein als die für den Motortyp angegebene maximale Drehzahl n bei Maximalmoment M . - Seite 101 Projektierung 5.2 Projektierungsablauf Motormoment-Drehzahl-Diagramms bestimmen Wenn das Motormoment-Drehzahl-Diagramm nicht vorliegt, bestimmen Sie das Motormoment-Drehzahl-Digramm ersatzweise aus folgenden Angaben aus dem Bild "Motormoment-Drehzahl-Diagramm": ● Maximalmoment M mit zugehöriger Drehzahl n MAX,MMAX ● Bemessungsmoment M mit dazugehöriger Drehzahl n Übertragen Sie in dieses Diagramm prinzipiell alle Arbeitspunkte des Lastspiels aus dem Motormoment-Zeit-Diagramm und dem Drehzahl-Zeit-Diagramm.
-
Seite 102: Erfüllung Der Drehmoment-Drehzahl-Anforderungen
Projektierung 5.2 Projektierungsablauf 5.2.7 Drehmoment-Drehzahl-Anforderungen Erfüllung der Drehmoment-Drehzahl-Anforderungen Falls der ausgewählte Motor die Drehmoment-Drehzahl-Anforderungen nicht erfüllen kann, bieten sich die folgenden Lösungsmöglichkeiten an. ● Größerer Motor Sofern ein Arbeitspunkt im Bereich A gewünscht ist, ist ein Motor mit größerem Durchmesser und / oder größerer Baulänge erforderlich (siehe Motor 2 im nachfolgenden Bild). -
Seite 103: Überprüfen Der Trägheitsmomente
Projektierung 5.2 Projektierungsablauf ● Feldschwächbetrieb Sofern ein Arbeitspunkt im Bereich C gewünscht ist, muss der Motor mit Feldschwächung betrieben werden (siehe nachfolgendes Bild). Vorteil: Es sind deutlich höhere Drehzahlen möglich. Nachteil: Die verfügbaren Momente sind sehr gering. Hierbei ist ein geringerer Strom erforderlich, siehe Beschreibung zum Feldschwächbetrieb im Kapitel "Technische Daten und Kennlinien"... -
Seite 104: Auswahl Der Komponenten Des Antriebssystems Für Den Leistungsanschluss
• Zur Dämpfung der Schwingungen empfehlen wir den Einsatz des zugehörigen Active Interface Modules oder einer HFD-Drossel mit Dämpfungswiderstand. Für Einzelheiten siehe Dokumentationen des verwendeten Antriebssystems oder wenden Sie sich an Ihre zuständige Siemens-Niederlassung. Hinweis Zum Betrieb der geregelten Einspeiseeinheit Active Line Module ist das zugehörige Active Interface Module oder die passende HFD-Netzdrossel zwingend erforderlich. -
Seite 105: Berechnung Der Erforderlichen Einspeisung
Projektierung 5.2 Projektierungsablauf 5.2.10 Berechnung der erforderlichen Einspeisung Dimensionierung des Active Infeed Ziehen Sie zur Dimensionierung des Active Infeed die Leistungsbilanz des Antriebs heran. Dazu muss zunächst die aufzubringende mechanische Leistung P an der Motorwelle mech bekannt sein. Ausgehend von dieser Wellenleistung, erhält man die dem Netz zu entnehmende elektrische Wirkleistung P , indem man zur mechanischen Leistung P Netz... -
Seite 106: Beispiele
Projektierung 5.3 Beispiele Beispiele Hinweis Die hier verwendeten Daten können von den angegebenen Werten im Kapitel "Technische Daten und Kennlinien" abweichen. Das ändert aber nichts am Vorgehen der Projektierung. Gegebene Randbedingungen für das Positionieren in vorgegebener Zeit ● Trägheitsmoment in kgm : J = 5,1 kg m bewegte zylinderförmige Masse m = 30 kg mit Ersatzradius r = 0,583 m;... -
Seite 107: Gesucht Wird
Projektierung 5.3 Beispiele Gesucht wird ● passender Torquemotor ● Winkelgeschwindigkeit ω in rad/s bzw. Drehzahl n in min ● Winkelbeschleunigung α in rad/s Die Form des Verfahrprofils ist nicht vorgeschrieben, sondern nur der zu überstreichende Winkel und die dafür vorgegebene Zeitdauer. Sofern keine einschränkenden Forderungen an Winkelbeschleunigung und / oder Winkel- geschwindigkeit gestellt werden, besteht der einfachste geeignete Verfahrvorgang aus- schließlich aus einem Beschleunigungsvorgang und anschließendem Verzögerungsvorgang. - Seite 108 Projektierung 5.3 Beispiele Tabelle 5- 2 Funktionen zu den einzelnen Abschnitten des Verfahrprofils Abschnitt I Abschnitt II α (t) = α α (t) = - α ω (t) = α t ω (t) = - α t + α t φ...
- Seite 109 Projektierung 5.3 Beispiele Für das benötigte Beschleunigungsmoment gilt: = (J + J ) • α Da das Trägheitsmoment J für den 1FW6-Motor zum jetzigen Zeitpunkt der Projektierung noch nicht bekannt ist, muss zunächst für J = 0 kgm angenommen werden. = 5,1 kgm •...
-
Seite 110: Bewertung
Projektierung 5.3 Beispiele Gegebene Randbedingungen für konstantes Drehen über längere Zeit ● Konstante Drehzahl 1200 min Durch den Bearbeitungsprozess tritt ein Lastmoment von 220 Nm auf. Da die Bearbeitung mehrere Minuten dauert, muss das erforderliche Motormoment im Drehmoment-Drehzahl-Diagramm mit Feldschwächung auf oder unterhalb der S1-Kennlinie liegen. -
Seite 111: Periodisch Wiederkehrendes Lastspiel (S3-Betrieb)
Projektierung 5.4 Montage Periodisch wiederkehrendes Lastspiel (S3-Betrieb) Der Motor kann einen Antriebsvorgang (z. B. den oben beschriebenen Positioniervorgang) mit zeitweise M > M zeitlich unbegrenzt wiederholen, wenn ausreichend lange Pausen mit stromlosen Wicklungen zwischen den Belastungsphasen vorhanden sind. Siehe hierzu auch Abschnitt "Aussetzbetrieb S3"... - Seite 112 Projektierung 5.4 Montage WARNUNG Quetschgefahr durch die Permanentmagnete der Läufer Die Anziehungskräfte der magnetischen Läufer wirken auf magnetisierbare Materialien. Im Nahbereich der Läufer steigen die Anziehungskräfte stark an. Die Auslöseschwelle von 3 mT für ein Verletzungsrisiko durch Anziehung und Projektilwirkung wird bei einem Abstand von 100 mm erreicht (Richtlinie 2013/35/EU).
- Seite 113 Projektierung 5.4 Montage Hinweis Fügevorrichtung Wegen der Vielzahl von Einbausituationen und Einbaurandbedingungen ist die Vorgabe einer generellen Fügevorrichtung nicht möglich. ACHTUNG Zerstörung des Motors Wenn Sie den Ständer beidseitig befestigen, können thermische Ausdehnungen zu erheblichen Materialverspannungen in der Maschinenkonstruktion führen. Außerdem können zu hohe mechanische Lasten durch den Ständer geleitet werden.
- Seite 114 Projektierung 5.4 Montage WARNUNG Gefahr durch elektrischen Schlag Jede Bewegung des Läufers gegenüber dem Ständer und umgekehrt führt zu einer induzierten Spannung an den Leitungsanschlüssen des Ständers. Bei eingeschaltetem Motor stehen die Leitungsanschlüsse des Ständers ebenfalls unter Spannung. Wenn Sie die Leitungsanschlüsse berühren, können Sie einen elektrischen Schlag erleiden.
-
Seite 115: Kräftewirkung Zwischen Ständer Und Läufer
Projektierung 5.4 Montage 5.4.2 Kräftewirkung zwischen Ständer und Läufer Radial- und Axialkräfte Bild 5-12 Wirkende Kräfte beim Fügen von Ständer und Läufer Läufer mit Permanentmagneten Ständer Axiale Anziehungskraft Radiale Anziehungskraft Radialkräfte zwischen Ständer und Läufer Die nachfolgende Tabelle zeigt die jeweils zwischen Ständer und Läufer wirkende radiale Kraft in N pro 0,1 mm Zentrierfehler. -
Seite 116: Axialkräfte Zwischen Ständer Und Läufer
Projektierung 5.4 Montage Beispiel Bei einem Torquemotor 1FW6092-2PC010-xxxx (Aktivteil-Länge 100 mm) beträgt die Exzentrizität z. B. 0,15 mm. Die aufgrund dieses Zentrierfehlers wirkende Radialkraft beträgt dann Axialkräfte zwischen Ständer und Läufer Tabelle 5- 4 Axialkräfte in N zwischen Ständer und Läufer während des Einbaus 1FW6092 1FW6152 1FW6192... -
Seite 117: Vorgabe Zur Montageseite
Projektierung 5.4 Montage 5.4.3 Vorgabe zur Montageseite Zulässige Montageseite ① A-Flansch ② B-Flansch mit Leitungsabgang Bild 5-13 A-Flansch und B-Flansch am Ständer Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 118 Projektierung 5.4 Montage Die nachfolgende Tabelle zeigt, welche Ständer Sie an welcher Montageseite montieren dürfen. Tabelle 5- 5 Zulässige Montageseite Artikel-Nr. A-Flansch B-Flansch 1FW6092-xxC05-2Exx 1FW6092-xxC05-4Fxx 1FW6092-xxC10-4Fxx 1FW6092-xxC10-8Fxx 1FW6092-xxC15-6Axx 1FW6092-xxC15-8Fxx 1FW6152-xxC05-3Axx 1FW6152-xxC05-6Ax 1FW6152-xxC10-6Axx 1FW6152-xxC10-2Pxx 1FW6152-xxC15-8Fxx 1FW6152-xxC15-2Pxx 1FW6192-xxC05-8Fxx 1FW6192-xxC05-4Fxx 1FW6192-xxC10-2Pxx 1FW6192-xxC10-8Fxx 1FW6192-xxC15-0Wxx 1FW6192-xxC15-8Fxx 1FW6192-xxC20-0Wxx 1FW6192-xxC20-8Fxx...
- Seite 119 Projektierung 5.4 Montage ① A-Flansch ② B-Flansch Bild 5-15 A-Flansch und B-Flansch am Läufer Sie dürfen die Läufer zur Übertragung der Betriebslast nur am A-Flansch montieren. Das Bohrbild am B-Flansch ist durch eine schwächere Dimensionierung nur für geringere Festigkeitsanforderungen (z. B. Handhabungszwecke) geeignet. Entsprechend der folgenden Darstellungen sind 2 Einbaulagen möglich.
- Seite 120 Projektierung 5.4 Montage ① ④ Ständer Anschraubbereich für den Läufer ② ⑤ Läufer Aktive Mitte des Läufers ③ ⑥ Anschraubbereich für den Ständer Aktive Mitte des Ständers Bild 5-16 A-Flansche von Ständer und Läufer sind auf der gleichen Seite montiert, Beispiel ①...
- Seite 121 Projektierung 5.4 Montage Bild 5-18 Anbau Läufer 1FW6092 und 1FW6152 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 122 Projektierung 5.4 Montage Bild 5-19 Anbau Läufer 1FW6192 und 1FW6232 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 123: Vorgaben Zur Befestigung Des Torquemotors
Projektierung 5.4 Montage 5.4.4 Vorgaben zur Befestigung des Torquemotors Befestigungstechnik Beachten Sie Folgendes bei der Befestigung des Torquemotors an die Achskonstruktion: ● Nur neue ungebrauchte Befestigungsschrauben verwenden. ● Schraubentypen mit Festigkeitsklassen gemäß nachfolgender Tabelle beachten. ● Befestigungsflächen müssen öl- und fettfrei sein. ●... -
Seite 124: Vorgehensweise Bei Der Montage Des Motors
Projektierung 5.4 Montage Tabelle 5- 6 Einschraubtiefen, Schraubentypen und Anziehdrehmomente für Ständer und Läufer Baugröße Komponente Einschraubtiefe in mm Schraubentyp Anziehdrehmo- (mit Festigkeits- ment in Nm min. erforderlich max. zulässig klasse) bei μ = 0,1 1FW6092 Ständer 10,6 M5 (8.8) 1FW6092 Läufer M6 (10.9) - Seite 125 Projektierung 5.4 Montage Vorgehensweise 1. Vorbereiten und reinigen der Anbauflächen von Motorteilen und Maschine. – Bearbeitungsrückstände wie Späne, Schmutz und Fremdpartikel sorgfältig entfernen. – Dieser Punkt gilt nur für Motoren mit Kühlmantel: Innen liegende Bohrungen (z. B. Kühleintritts– und –austrittsbohrungen) des Maschinengehäuses entgraten und verrunden.
- Seite 126 Projektierung 5.4 Montage 4. Ständer und Läufer fügen. WARNUNG Quetschgefahr Wenn Sie Ständer und Läufer von Hand fügen, besteht Quetschgefahr. • Verwenden Sie für das Fügen geeignete Fügehilfsmittel. ACHTUNG Beschädigung von Ständer und Läufer Ständer und Läufer dürfen sich während des Fügevorgangs nicht berühren, da Beschädigungen auftreten können.
-
Seite 127: Kühleranschluss
Projektierung 5.4 Montage 5.4.6 Kühleranschluss Die Montage der Anschlussteile ist in der Regel mit Standard-Werkzeug möglich. Ermitteln Sie vorab die Summe der Druckverluste der einzelnen Kühlkomponenten und der Verrohrung. Vergleichen Sie das Ergebnis mit dem Leistungsvermögen des Kühlaggregats. 5.4.6.1 Kühleranschluss bei Motoren mit Kühlmantel Den Kühleranschluss für Motoren mit der Kühlart "Mantelkühlung"... - Seite 128 Projektierung 5.4 Montage ① ⑥ Kundengehäuse Anschlussblock 1 für den elektrischen Anschluss ② ⑦ O-Ringe Anschlussblock 2 für den elektrischen Anschluss ③ ⑧ Wasserkühlung Vorlauf oder Rücklauf ④ Ständer Alle Maße in mm ⑤ Läufer Bild 5-20 Kühleranschluss für 1FW6092 (Beispiel) Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 129 Projektierung 5.4 Montage ① Kundengehäuse ② O-Ringe ③ Wasserkühlung ④ Ständer ⑤ Läufer ⑥ Anschlussblock 1 für den elektrischen Anschluss ⑦ Anschlussblock 2 für den elektrischen Anschluss ⑧ Vorlauf oder Rücklauf Alle Maße in mm Bild 5-21 Kühleranschluss für 1FW6152 (Beispiel) Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 130: Kühleranschluss Bei Motoren Mit Integrierter Kühlung
Projektierung 5.4 Montage 5.4.6.2 Kühleranschluss bei Motoren mit integrierter Kühlung Bei Einbau-Torquemotoren mit integrierter Kühlung sind keine konstruktiven Maßnahmen an der Maschinenkonstruktion für den Anschluss der Kühlung notwendig. Sie können den Kühler direkt über Fittings (1/8" Rohrgewinde DIN 2999) anschließen. Jeder Kühlkreislauf von Motoren mit einem Präzisions- und Hauptkühler kann separat gespeist und geschaltet werden. - Seite 131 Projektierung 5.4 Montage Kühlanschlussadapter (Option) Bild 5-22 Kühlanschlussadapter (Option) für parallelen Anschluss von Hauptkühler und Präzisionskühler für 1FW619x, 1FW623x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 132 Projektierung 5.4 Montage Kühleranschluss für 1FW619x und 1FW623x ① Ständer ② Vorlauf oder Rücklauf Hauptkühler ③ Vorlauf oder Rücklauf Präzisionskühler Alle Maße in mm Bild 5-23 Kühlanschlussplatte für 1FW619x und 1FW623x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 133 Projektierung 5.4 Montage Bild 5-24 Kühleranschluss axial mit Kühlanschlussadapter (Option) für 1FW619x, 1FW623x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 134 Projektierung 5.4 Montage Bild 5-25 Kühleranschluss radial außen mit Kühlanschlussadapter (Option) für 1FW619x, 1FW623x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 135 Projektierung 5.4 Montage Bild 5-26 Kühlanschlussadapter (Option) für 1FW619x, 1FW623x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 136: Schläuche Des Kühlsystems
Projektierung 5.4 Montage 5.4.6.3 Schläuche des Kühlsystems Die Schläuche des Kühlsystems müssen sich durch gute Kühlmittelbeständigkeit, Flexibilität und Abriebfestigkeit auszeichnen. Die Auswahl der Schläuche für das Kühlsystem kann erst erfolgen, wenn alle an der Kühlung beteiligten Materialien und Randbedingungen bekannt sind. - Seite 137 Projektierung 5.4 Montage Bild 5-27 Montage Kühlanschlussadapter, 1FW619x, 1FW623x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 138: Prüfen Der Arbeiten
Projektierung 5.4 Montage 5.4.7 Prüfen der Arbeiten Montagearbeiten überprüfen Überprüfen Sie nach abgeschlossener Montage die Leichtgängigkeit des Läufers. Beachten Sie, dass bei kurzgeschlossenen Motorphasen der Läufer sich schwer drehen lässt - auch dann, wenn sonst kein mechanischer Widerstand vorhanden ist. Entfernen Sie vor der Bewegung des Läufers alle Werkzeuge und Gegenstände aus dem Schwenkbereich und dem Luftspalt. -
Seite 139: Technische Daten Und Kennlinien
Technische Daten und Kennlinien In diesem Kapitel sind die technischen Daten und Kennlinien zu den Einbau-Torquemotoren 1FW6 High Speed angegeben. Diese Datensammlung liefert die für die Projektierung notwendigen Motordaten und enthält eine Reihe zusätzlicher Daten für tiefergehende Berechnungen im Rahmen von Detailbetrachtungen und Problemanalysen. Änderungen der Daten sind vorbehalten. -
Seite 140: Erläuterungen
Technische Daten und Kennlinien 6.1 Erläuterungen Erläuterungen 6.1.1 Erläuterungen der Formelkurzzeichen Datenblattinhalt Die in den Datenblättern enthaltenen Daten werden nachfolgend erklärt und sind wie folgt unterteilt: ● Randbedingungen ● Daten im Bemessungspunkt ● Grenzdaten ● Physikalische Konstanten ● Daten Motor-Kühler Randbedingungen Zwischenkreisspannung des Umrichters (Gleichspannungswert). -
Seite 141: Physikalische Konstanten
Technische Daten und Kennlinien 6.1 Erläuterungen Hinweis Die Summe aus abgegebener mechanischer Leistung P und Verlustleistung P ergibt die mech aufgenommene elektrische Leistung des Motors P Vergleichen Sie hierzu auch "Berechnung der erforderlichen Einspeisung". Maximal zulässige Betriebsdrehzahl. Maximale Drehzahl, bis zu der der Motor das Maximalmoment M liefern kann. - Seite 142 Technische Daten und Kennlinien 6.1 Erläuterungen Bild 6-1 Thermische Zeitkonstante Polpaarzahl des Motors. Rastmoment (cogging torque). Dies ist das Moment aufgrund der Wechselwirkung zwischen Blechpaket und Permanentmagneten am Luftspalt bei stromlosem Stän- der. Das Rastmoment lässt sich wie folgt berechnen: Hierbei sind a bis a die Amplituden der Drehmoment-Oberwellen.
- Seite 143 Technische Daten und Kennlinien 6.1 Erläuterungen Daten Motor-Hauptkühler Maximale abgeführte Wärmeleistung durch den Hauptkühler bei Ausnutzung des H,MAX Motors bis zum Bemessungsmoment M und bei Bemessungstemperatur T Empfohlener Mindest-Volumenstrom im Hauptkühler zum Erzielen des Bemes- H,MIN sungsmoments M ΔT Der Temperaturanstieg des Kühlmediums zwischen Vorlauf und Rücklauf des Hauptkühlers im Betriebspunkt Q lässt sich mit folgender Formel H,MAX...
-
Seite 144: Daten Motor-Präzisionskühler
Technische Daten und Kennlinien 6.1 Erläuterungen Bild 6-3 Beispiel-Kennlinie "Druckverluste Hauptkühler über Volumenstrom" Daten Motor-Präzisionskühler Maximale abgeführte Wärmeleistung durch den Präzisionskühler bei Ausnutzung P,MAX des Motors bis zum Bemessungsmoment M und bei Bemessungstemperatur T Empfohlener Mindest-Volumenstrom im Präzisionskühler zum Erzielen einer mini- P,MIN malen Temperaturerhöhung an der Anbaufläche des Ständers gegenüber T VORL... -
Seite 145: Erläuterungen Der Kennlinien
Technische Daten und Kennlinien 6.1 Erläuterungen 6.1.2 Erläuterungen der Kennlinien Drehmoment-Drehzahl-Diagramm mit Feldschwächung S1-Betrieb S1-Betrieb mit Feldschwächung S3-Betrieb, Spieldauer nicht länger als 10 % der thermischen Zeitkonstanten t S3-Betrieb mit Feldschwächung, Spieldauer nicht länger als 10 % der thermischen Zeitkonstanten t Spannungsgrenzkennlinie Grenzkennlinie für S1-Betrieb Spannungsgrenzkennlinie mit Feldschwächung... - Seite 146 Technische Daten und Kennlinien 6.1 Erläuterungen Betriebspunkte bei Feldschwächung liegen links bzw. unterhalb der "Spannungsgrenzkennlinie mit Feldschwächung" und rechts der "Spannungsgrenzkennlinie". Hinweis Ab einer bestimmten Drehzahl ist ein Voltage Protection Module VPM erforderlich, siehe hierzu Kapitel "Projektierung" und "Datenblätter und Kennlinien". Beachten Sie, dass mit zunehmender Drehzahl die Läufer-Verlustleistung steigt und zusätzliche Maßnahmen zur Wärmeabfuhr des Läufers erforderlich sein können.
-
Seite 147: Datenblätter Und Kennlinien
Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblätter und Kennlinien Tabelle 6- 1 Farbliche Zuordnung der M-n-Kennlinien in den Diagrammen Farbe Resultierende Zwischen- Umrichterausgangs- Zulässige Netzspannung SINAMICS S120 kreisspannung U spannung (Effektivwert) Line Module (Effektivwert) a max 634 V 460 V 3 x AC 480 V Smart Line Module,... -
Seite 148: 1Fw6092-Xxxxx-Xxxx
Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien 6.2.1 1FW6092-xxxxx-xxxx Datenblatt 1FW6092-xxC05-xxxx Tabelle 6- 2 1FW6092-xxC05-2Exx, 1FW6092-xxC05-4Fxx Technische Daten Kurz- Einheit -xxC05-2Exx -xxC05-4Fxx bezeich- 1FW6092 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment Bemessungsstrom 31,3... - Seite 149 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC05-2Exx -xxC05-4Fxx bezeich- 1FW6092 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 3,05 2,99 H,MAX empfohlener Mindest-Volumenstrom l/min H,MIN ΔT Temperaturanstieg des Kühlmediums 7,45 7,29 Δp Druckabfall 0,419 0,419 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 150 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6092-xxC05-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 151 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 152 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 153 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6092-xxC10-xxxx Tabelle 6- 3 1FW6092-xxC10-4Fxx, 1FW6092-xxC10-8Fxx Technische Daten Kurz- Einheit -xxC10-4Fxx -xxC10-8Fxx bezeich- 1FW6092 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment Bemessungsstrom 62,5 Bemessungsdrehzahl 1060...
- Seite 154 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC10-4Fxx -xxC10-8Fxx bezeich- 1FW6092 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 5,05 5,01 H,MAX empfohlener Mindest-Volumenstrom l/min 9,21 9,21 H,MIN ΔT Temperaturanstieg des Kühlmediums 7,83 Δp Druckabfall 0,877 0,877 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 155 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6092-xxC10-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 156 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 157 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 158 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6092-xxC15-xxxx Tabelle 6- 4 1FW6092-xxC15-6Axx, 1FW6092-xxC15-8Fxx Technische Daten Kurz- Einheit -xxC015- xxC15-8Fxx bezeich- 6Axx 1FW6092 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment Bemessungsstrom Bemessungsdrehzahl Bemessungsverlustleistung...
- Seite 159 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC015- xxC15-8Fxx bezeich- 6Axx 1FW6092 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 7,13 H,MAX empfohlener Mindest-Volumenstrom l/min 12,1 12,1 H,MIN ΔT Temperaturanstieg des Kühlmediums 8,49 8,58 Δp Druckabfall 1,38 1,38 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 160 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6092-xxC15-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 161 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 162 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 163: 1Fw6152-Xxxxx-Xxxx
Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien 6.2.2 1FW6152-xxxxx-xxxx Datenblatt 1FW6152-xxC05-xxxx Tabelle 6- 5 1FW6152-xxC05-3Axx, 1FW6152-xxC05-6Axx Technische Daten Kurz- Einheit -xxC05-3Axx -xxC05-6Axx bezeich- 1FW60152 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment Bemessungsstrom 26,6... - Seite 164 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC05-3Axx -xxC05-6Axx bezeich- 1FW60152 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 4,58 4,31 H,MAX empfohlener Mindest-Volumenstrom l/min 8,87 8,87 H,MIN ΔT Temperaturanstieg des Kühlmediums 7,43 6,99 Δp Druckabfall 0,69 0,69 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 165 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6152-xxC05-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 166 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 167 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 168 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6152-xxC10-xxxx Tabelle 6- 6 1FW6152-xxC10-6Axx, 1FW6152-xxC10-2Pxx Technische Daten Kurz- Einheit -xxC10-6Axx -xxC10-2Pxx bezeich- 1FW6152 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment 1070 1050 Bemessungsstrom 53,8...
- Seite 169 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC10-6Axx -xxC10-2Pxx bezeich- 1FW6152 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 7,15 7,15 H,MAX empfohlener Mindest-Volumenstrom l/min 14,7 14,7 H,MIN ΔT Temperaturanstieg des Kühlmediums 6,99 6,99 Δp Druckabfall 1,84 1,84 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 170 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6152-xxC10-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 171 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 172 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 173 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6152-xxC15-xxxx Tabelle 6- 7 1FW6152-xxC15-8Fxx, 1FW6152-xxC15-2Pxx Technische Daten Kurz- Einheit -xxC15-8Fxx -xxC15-2Pxx bezeich- 1FW6152 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment 1610 1590 Bemessungsstrom 79,7...
- Seite 174 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC15-8Fxx -xxC15-2Pxx bezeich- 1FW6152 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 10,6 9,97 H,MAX empfohlener Mindest-Volumenstrom l/min 18,7 18,7 H,MIN ΔT Temperaturanstieg des Kühlmediums 8,12 7,66 Δp Druckabfall 2,94 2,94 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 175 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6152-xxC15-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 176 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 177 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 178: 1Fw6192-Xxxxx-Xxxx
Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien 6.2.3 1FW6192-xxxxx-xxxx Datenblatt 1FW6192-xxC05-xxxx Tabelle 6- 8 1FW6192-xxC05-4Fxx, 1FW6192-xxC05-8Fxx Technische Daten Kurz- Einheit -xxC05-4Fxx -xxC05-8Fxx bezeich- 1FW6192 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment Bemessungsstrom 40,3... - Seite 179 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC05-4Fxx -xxC05-8Fxx bezeich- 1FW6192 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung H,MAX empfohlener Mindest-Volumenstrom l/min 8,32 8,32 H,MIN ΔT Temperaturanstieg des Kühlmediums 7,44 7,43 Δp Druckabfall 1,22 1,22 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 180 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6192-xxC05-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 181 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 182 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 183 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6192-xxC10-xxxx Tabelle 6- 9 1FW6192-xxC10-8Fxx, 1FW6192-xxC10-2Pxx Technische Daten Kurz- Einheit -xxC10-8Fxx -xxC10-2Pxx bezeich- 1FW6192 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment 1700 1670 Bemessungsstrom 80,5...
- Seite 184 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC10-8Fxx -xxC10-2Pxx bezeich- 1FW6192 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 7,04 H,MAX empfohlener Mindest-Volumenstrom l/min 10,4 10,4 H,MIN ΔT Temperaturanstieg des Kühlmediums 9,76 9,56 Δp Druckabfall 1,87 1,87 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 185 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6192-xxC10-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 186 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 187 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 188 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6192-xxC15-xxxx Tabelle 6- 10 1FW6192-xxC15-8Fxx, 1FW6192-xxC15-0Wxx Technische Daten Kurz- Einheit -xxC15-8Fxx -xxC15-0Wxx bezeich- 1FW6192 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment 2570 2520 Bemessungsstrom 81,4...
- Seite 189 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC15-8Fxx -xxC15-0Wxx bezeich- 1FW6192 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 9,78 9,78 H,MAX empfohlener Mindest-Volumenstrom l/min 13,7 13,7 H,MIN ΔT Temperaturanstieg des Kühlmediums 10,3 10,3 Δp Druckabfall Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 190 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6192-xxC15-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 191 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 192 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 193 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Datenblatt 1FW6192-xxC20-xxxx Tabelle 6- 11 1FW6192-xxC20-8Fxx, 1FW6192-xxC20-0Wxx Technische Daten Kurz- Einheit -xxC20-8Fxx -xxC20-0Wxx bezeich- 1FW6192 nung Randbedingungen Zwischenkreisspannung Vorlauftemperatur der Wasserkühlung °C VORL Bemessungstemperatur der Wicklung °C Daten im Bemessungspunkt Bemessungsmoment 3440 3390 Bemessungsstrom 81,9...
- Seite 194 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Technische Daten Kurz- Einheit -xxC20-8Fxx -xxC20-0Wxx bezeich- 1FW6192 nung Daten Motor-Hauptkühler maximale abgeführte Wärmeleistung 12,6 12,6 H,MAX empfohlener Mindest-Volumenstrom l/min 14,6 14,6 H,MIN ΔT Temperaturanstieg des Kühlmediums 12,5 12,5 Δp Druckabfall 3,63 3,63 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 195 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kennlinien für 1FW6192-xxC20-xxxx Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 196 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Drehmoment über Drehzahl Drehmoment über Drehzahl Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 197 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Kurzschluss-Bremsmoment über Drehzahl Δp Hauptkühler - Druckverluste über Volumenstrom Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 198 Technische Daten und Kennlinien 6.2 Datenblätter und Kennlinien Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 199: Einsatzvorbereitung
Einsatzvorbereitung WARNUNG Lebensgefahr und Quetschgefahr durch permanentmagnetische Felder Wenn Sie die Sicherheitshinweise zu den permanentmagnetischen Feldern der Läufer nicht beachten, können schwere Personen- und Sachschäden die Folge sein. • Beachten Sie das Kapitel "Gefahren durch starke Magnetfelder (Seite 30)". Bewahren Sie auch die Originalverpackungen der Ständer und Läufer und die Distanzfolie auf. - Seite 200 Einsatzvorbereitung WARNUNG Unsachgemäße Verpackung, Lagerung und/oder unsachgemäßer Transport Bei unsachgemäßer Verpackung, Lagerung und/oder unsachgemäßen Transport- und Hebevorgängen besteht die Gefahr von Tod, Körperverletzung und/oder Sachschäden. • Halten Sie die Sicherheitshinweise für Lagerung und Transport ein. • Arretieren Sie vor dem Transport oder Heben von Maschinen oder Maschinenteilen Drehachsen gegen unbeabsichtigtes Drehen.
-
Seite 201: Transportieren
Einsatzvorbereitung 7.1 Transportieren Transportieren Hinweis UN-Nummer für Permanentmagnete Permanentmagnete als Gefahrengut sind der UN-Nummer 2807 zugeordnet. Für See- und Straßenfracht sind bei Produkten, die Permanentmagnete enthalten, keine zusätzlichen Maßnahmen zum Schutz vor Magnetfeldern bei der Verpackung erforderlich. 7.1.1 Umweltbedingungen für Transport In Anlehnung DIN EN 60721-3-2 (für Transport) Tabelle 7- 1 Klimatische Umweltbedingungen Untergrenze Lufttemperatur:... -
Seite 202: Vorgaben Für Verpackungen Bei Lufttransport
Einsatzvorbereitung 7.1 Transportieren 7.1.2 Vorgaben für Verpackungen bei Lufttransport Beim Lufttransport von Produkten, die Permanentmagnete enthalten, dürfen die maximal zulässigen Magnetfeldstärken gemäß IATA-Verpackungsanweisung nicht überschritten werden. Gegebenenfalls sind besondere Maßnahmen erforderlich, damit ein Versand dieser Produkte zulässig wird. Ab einer bestimmten Magnetfeldstärke ist der Versand anzeige- und kennzeichnungspflichtig. -
Seite 203: Einlagern
Einsatzvorbereitung 7.2 Einlagern Einlagern 7.2.1 Umweltbedingungen für Langzeitlagerung In Anlehnung an DIN EN 60721-3-1 (für Langzeitlagerung) Tabelle 7- 6 Klimatische Umweltbedingungen Untergrenze Lufttemperatur: - 5 °C (abweichend von 3K3) Obergrenze Lufttemperatur: + 40 °C Untergrenze relative Luftfeuchte: Obergrenze relative Luftfeuchte: 85 % Änderungsgeschwindigkeit Tempera- max. -
Seite 204: Einlagern In Räumen Und Schutz Vor Feuchtigkeit
Einsatzvorbereitung 7.2 Einlagern 7.2.2 Einlagern in Räumen und Schutz vor Feuchtigkeit Die Motoren können unter folgenden Bedingungen bis zu 2 Jahre gelagert werden: Einlagern in Räumen ● Wenn noch kein Konservierungsmittel werkseitig aufgebracht ist, versehen Sie blanke äußere Bauteile mit einem Konservierungsmittel, z. B. mit Tectyl. ●... -
Seite 205: Elektrischer Anschluss
Elektrischer Anschluss ACHTUNG Zerstörung des Motors durch direkten Anschluss an das Drehstromnetz Der direkte Anschluss an das Drehstromnetz führt zur Zerstörung des Motors. • Betreiben Sie die Motoren nur mit den projektierten Umrichtern. WARNUNG Gefahr durch elektrischen Schlag Wenn Sie am Ständer als Einzelkomponente eine Spannung anlegen, können Sie mangels Berührungsschutz einen elektrischen Schlag erleiden. - Seite 206 Elektrischer Anschluss WARNUNG Gefahr durch elektrischen Schlag Jede Bewegung des Läufers gegenüber dem Ständer und umgekehrt führt zu einer induzierten Spannung an den Leitungsanschlüssen des Ständers. Bei eingeschaltetem Motor stehen die Leitungsanschlüsse des Ständers ebenfalls unter Spannung. Wenn Sie die Leitungsanschlüsse berühren, können Sie einen elektrischen Schlag erleiden.
-
Seite 207: Zulässige Netzformen
Elektrischer Anschluss 8.1 Zulässige Netzformen WARNUNG Elektrischer Schlag durch hohe Ableitströme Hohe Ableitströme können beim Berühren leitfähiger Teile der Maschine zu einem elektrischen Schlag führen. • Beachten Sie bei hohen Ableitströmen die erhöhten Anforderungen an den Schutzleiter. Die Anforderungen sind in den Normen DIN EN 61800-5-1 und DIN EN 60204-1 geregelt. -
Seite 208: Schaltbild Des Motors
Elektrischer Anschluss 8.2 Schaltbild des Motors Bei Betrieb an IT-Netzen muss eine Schutzvorrichtung vorhanden sein, die im Fehlerfall eines Erdschlusses das Antriebssystem abschaltet. Bei Betrieb mit geerdetem Außenleiter muss ein Trenntransformator mit geerdetem Sternpunkt (Sekundärseite) zwischen Netz und Antriebssystem geschaltet sein. Dadurch wird eine unzulässige Beanspruchung der Wicklungsisolierung vermieden. - Seite 209 Elektrischer Anschluss 8.2 Schaltbild des Motors Hinweis Temp-S bei Schaltbild B Wenn Sie Motoren vom Typ "Schaltbild B" elektrisch parallel betreiben, ist die Reihenschaltung der Temperaturüberwachungskreise Temp-S nicht zulässig. Tabelle 8- 2 Zuordnung der Motortypen zum Schaltbild Motortyp Schaltbild 1FW6092-xxC05-2Exx 1FW6092-xxC05-4Fxx 1FW6092-xxC10-4Fxx 1FW6092-xxC10-8Fxx...
-
Seite 210: Systemeinbindung
Elektrischer Anschluss 8.3 Systemeinbindung Systemeinbindung 8.3.1 Antriebssystem Komponenten Das Antriebssystem, an dem ein Motor betrieben wird, besteht aus einem Einspeisemodul, einem Leistungsmodul und einem Regelungsmodul. Beim Antriebssystem SINAMICS S120 werden diese Module "Line Modules", "Motor Modules" und "Control Unit" genannt. Die Line Modules gibt es als geregelt mit Rückspeisung (ALM, Active Line Modules), als ungeregelt mit Rückspeisung (SLM, Smart Line Modules) und als ungeregelt ohne Rückspeisung (BLM, Basic Line Modules). - Seite 211 Elektrischer Anschluss 8.3 Systemeinbindung Das nachfolgende Bild zeigt eine beispielhafte Systemeinbindung mit Anschluss von Temp-S, Temp-F und einem Inkrementalgeber (sin/cos 1 V ) über SME120. Bild 8-4 Systemeinbindung mit SME120 (Beispiel) Das nachfolgende Bild zeigt eine beispielhafte Systemeinbindung mit Anschluss von Temp-S und Temp-F über TM120 und SMC20.
-
Seite 212: Voraussetzungen
Elektrischer Anschluss 8.3 Systemeinbindung Das nachfolgende Bild zeigt eine beispielhafte Systemeinbindung mit Anschluss von Temp-S und Temp-F über TM120. Ein DRIVE-CLiQ-Geber ist direkt an das TM120 angeschlossen. Bild 8-6 Systemeinbindung mit TM120 (Beispiel) Voraussetzungen ● Die Auswahl des Motor Modules richtet sich nach dem Motorstrom bei Drehmoment M bzw. -
Seite 213: Sensor Module Sme12X
• Zur Dämpfung der Schwingungen empfehlen wir den Einsatz des zugehörigen Active Interface Modules oder einer HFD-Drossel mit Dämpfungswiderstand. Für Einzelheiten siehe Dokumentationen des verwendeten Antriebssystems oder wenden Sie sich an Ihre zuständige Siemens-Niederlassung. Hinweis Zum Betrieb der geregelten Einspeiseeinheit Active Line Module ist das zugehörige Active Interface Module oder die passende HFD-Netzdrossel zwingend erforderlich. -
Seite 214: Terminal Module Tm120
Elektrischer Anschluss 8.3 Systemeinbindung 8.3.3 Terminal Module TM120 Das Terminal Module TM120 ist eine Baugruppe zur Auswertung von Temperatursignalen. Für einen besseren thermischen Kontakt zur Motorwicklung sind die Temperatursensoren in den Motoren nicht sicher elektrisch getrennt ausgeführt. Das Terminal Module TM120 wertet die Temperatursensoren sicher elektrisch getrennt aus. Informationen zum TM120 finden Sie im Gerätehandbuch "SINAMICS S120 Control Units und ergänzende Systemkomponenten". - Seite 215 Elektrischer Anschluss 8.3 Systemeinbindung Anschlussvarianten Nachfolgend sind die Anschlussvarianten für den elektrischen Anschluss dargestellt: ● Leistungsanschluss für die Phasen U, V, W je nach Motor in einfacher oder doppelter Ausführung ● Anschluss der Signalleitung TF für die Temperatursensoren Temp-S und Temp-F ●...
-
Seite 216: Daten Der Leistungsleitung Am Ständer
Elektrischer Anschluss 8.3 Systemeinbindung 8.3.6 Daten der Leistungsleitung am Ständer Tabelle 8- 4 Daten der Leistungsleitung am Ständer Motortyp Leistungsan- Max. Durch- Aderzahl x Min. Biegeradius "R1" Max. Höhe der schluss messer "d1" Querschnitt in mm Hülse "C1" in mm in mm in mm 1FW6092-xxC05-2Exx... -
Seite 217: Leistungsanschluss
Elektrischer Anschluss 8.3 Systemeinbindung Motortyp Leistungsan- Max. Durch- Aderzahl x Min. Biegeradius "R1" Max. Höhe der schluss messer "d1" Querschnitt in mm Hülse "C1" in mm in mm in mm 1FW6192-xxC20-8Fxx einfach 3x(1x16) + M10 für PE (1x16) Einzeladern 1FW6192-xxC20-0Wxx einfach 16,4 3x(1x50) + M10 für... -
Seite 218: Mindestquerschnitte Für Schutzleiter
Elektrischer Anschluss 8.3 Systemeinbindung Mindestquerschnitte für Schutzleiter In der DIN EN 60034-1 sind die Mindestquerschnitte für Schutzleiter wie folgt geregelt: Querschnitt der stromtragenden Leiter Mindestquerschnitt des Schutzleiters S < 25 mm S < 50 mm 25 mm S > 50 mm ½... - Seite 219 Elektrischer Anschluss 8.3 Systemeinbindung Temperatursensoren korrekt anschließen ACHTUNG Zerstörung des Motors durch Übertemperatur Wenn Sie die Temperatursensoren nicht korrekt anschließen, kann der Motor durch Übertemperatur zerstört werden. • Beachten Sie beim Anschließen von Temperatursensorleitungen mit offenen Aderenden die korrekte Zuordnung der Aderfarben. Temperatursensoranschluss - Standard Schließen Sie die Signalleitung wahlweise wie folgt an: ●...
-
Seite 220: Elektrischer Anschluss
Elektrischer Anschluss 8.3 Systemeinbindung Bild 8-7 Anschlussübersicht Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... -
Seite 221: Schirmung, Erdung Und Potenzialausgleich
Ableitströme andere Geräte beschädigen. • Schließen Sie die Schirmung der Leistungsleitung am Schirmanschluss des Leistungsmoduls an. Hinweis Wenden Sie die EMV-Aufbaurichtlinie des Umrichterherstellers an. Für Umrichter von Siemens steht diese unter der Dokumentbestellnummer 6FC5297-□AD30-0□P□ zur Verfügung. Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... -
Seite 222: Anforderungen An Die Motorzuleitungen
Elektrischer Anschluss 8.3 Systemeinbindung Hinweis Einzelader-Leistungsleitungen ohne Schutzleiter Bei 1FW6-Einbau-Torquemotoren mit Einzelader-Leistungsleitungen ohne Schutzleiter- Leitung ist eine Anschlussstelle für den Schutzleiter (PE) vorgesehen. Schließen Sie an diese Anschlussstelle eine separate Schutzleiter-Leitung an. Beachten Sie hierbei den vorgegebenen Querschnitt für den direkten Anschluss an das Leistungsmodul. Querschnittsvorgaben siehe Kapitel "Daten der Leistungsleitung am Ständer". -
Seite 223: Zulässige Längen Von Motorzuleitungen
Elektrischer Anschluss 8.3 Systemeinbindung Zulässige Längen von Motorzuleitungen Die zulässige Länge der Leistungsleitung zwischen Motor und Einspeiseeinheit ist von der Bemessungsleistung bzw. vom Bemessungs-Ausgangsstrom der Einspeiseeinheit abhängig. Beispiel Motor Module, geschirmte Leitung: bis 50 m Länge der Leistungsleitung bei Bemessungs-Ausgangsstrom ≤... - Seite 224 Elektrischer Anschluss 8.3 Systemeinbindung Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 225: Einbauzeichnungen / Maßblätter
Einbauzeichnungen / Maßblätter Einbausituation für Motoren mit Kühlmantel Konstruktionshinweise für Einbaubohrung und O-Ring ● Einführschrägen vorsehen: Mindestlänge Z bei 15°: 3 mm, bei 20°: 2 mm, Kanten gerundet und poliert Innenliegende Bohrungen (Kühlwasseranschlüsse) entgraten und runden ● Oberflächengüten der Gegendichtflächen: R ≤... -
Seite 226: Einbaumaße
Einbauzeichnungen / Maßblätter 9.2 Informationen zu den Einbauzeichnungen Einbaumaße Beachten Sie für die Konstruktion folgende Maße besonders. Außendurchmesser Ständer L_St Ständerlänge Innendurchmesser Läufer L_RO Läuferlänge Innendurchmesser Ständer Bild 9-2 Durchmesser und Länge 1FW6092 und 1FW6152 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 227 Einbauzeichnungen / Maßblätter 9.2 Informationen zu den Einbauzeichnungen Außendurchmesser Ständer L_St Ständerlänge Innendurchmesser Läufer L_RO Läuferlänge Innendurchmesser Ständer Bild 9-3 Durchmesser und Länge 1FW6192 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 228 Einbauzeichnungen / Maßblätter 9.2 Informationen zu den Einbauzeichnungen Hinweis Motorenmaße Siemens behält sich vor, Motorenmaße ohne vorherige Mitteilung im Zuge von Konstruktionsverbesserungen zu ändern. Die in dieser Dokumentation dargestellten Maßblätter können an Aktualität verlieren. Aktuelle Maßblätter können Sie kostenlos anfordern.
-
Seite 229: Einbauzeichnungen / Maßblätter 1Fw6092
Einbauzeichnungen / Maßblätter 9.3 Einbauzeichnungen / Maßblätter 1FW6092 Einbauzeichnungen / Maßblätter 1FW6092 Bild 9-5 1FW6092-8PCxx-xxB3 Ständer mit einfachem axialen Leitungsabgang Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 230 Einbauzeichnungen / Maßblätter 9.3 Einbauzeichnungen / Maßblätter 1FW6092 Bild 9-6 1FW6092-8PCxx-xxB3 Ständer mit doppeltem axialen Leitungsabgang Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 231 Einbauzeichnungen / Maßblätter 9.3 Einbauzeichnungen / Maßblätter 1FW6092 Bild 9-7 1FW6092 Läufer Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 232: Einbauzeichnungen / Maßblätter 1Fw6152
Einbauzeichnungen / Maßblätter 9.4 Einbauzeichnungen / Maßblätter 1FW6152 Einbauzeichnungen / Maßblätter 1FW6152 Bild 9-8 1FW6152-8PCxx-xxB3 Ständer mit einfachem axialen Leitungsabgang Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 233 Einbauzeichnungen / Maßblätter 9.4 Einbauzeichnungen / Maßblätter 1FW6152 Bild 9-9 1FW6152-8PCxx-xxB3 Ständer mit doppeltem axialen Leitungsabgang Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 234 Einbauzeichnungen / Maßblätter 9.4 Einbauzeichnungen / Maßblätter 1FW6152 Bild 9-10 1FW6152 Läufer Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 235: Einbauzeichnungen / Maßblätter 1Fw6192
Einbauzeichnungen / Maßblätter 9.5 Einbauzeichnungen / Maßblätter 1FW6192 Einbauzeichnungen / Maßblätter 1FW6192 Bild 9-11 1FW6192-8WCxx-xxB3 Ständer mit axialem Leitungsabgang Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0... - Seite 236 Einbauzeichnungen / Maßblätter 9.5 Einbauzeichnungen / Maßblätter 1FW6192 Bild 9-12 1FW6192-8VCxx-xxB3 Ständer mit radialem Leitungsabgang Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 237 Einbauzeichnungen / Maßblätter 9.5 Einbauzeichnungen / Maßblätter 1FW6192 Bild 9-13 1FW6192 Läufer Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 238 Einbauzeichnungen / Maßblätter 9.5 Einbauzeichnungen / Maßblätter 1FW6192 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 239: Gekoppelte Motoren
Artikelnummern aller beteiligten Motoren übereinstimmen. Die Motoren sind elektrisch parallel geschaltet und arbeiten im Parallelbetrieb. Für Fragen stehen die Ansprechpartner der Siemens-Niederlassungen zur Verfügung. Sie erhalten z. B. Informationen zur optimalen Projektierung oder Auslegung von Antriebssystemen mit Torquemotoren im Parallelbetrieb. -
Seite 240: Master Und Stoker
Gekoppelte Motoren 10.2 Master und Stoker 10.2 Master und Stoker Der erste Motor in einer Achse wird als „Master“ bezeichnet. Der Master definiert die positive Drehrichtung der Achse. Der zweite und jeder weitere Motor wird als „Stoker“ bezeichnet. Die nachfolgenden Festlegungen gelten auch für jeden weiteren Stoker. Ob eine Tandem- oder Janus-Anordnung vorteilhafter ist, hängt vom Platzbedarf und der Leitungsführung ab. -
Seite 241: Maschinenkonstruktion Und Justage Des Phasenwinkels
Gekoppelte Motoren 10.3 Maschinenkonstruktion und Justage des Phasenwinkels Leistungsanschluss Tabelle 10- 1 Leistungsanschluss beim Parallelbetrieb zweier Torquemotoren Motor Module Master Stoker Stoker Tandem-Anordnung Janus-Anordnung 10.3 Maschinenkonstruktion und Justage des Phasenwinkels Jede Drehung des montierten Läufers induziert die 3-phasige EMK des Motors in den Phasenwicklungen des Ständers. - Seite 242 Gekoppelte Motoren 10.3 Maschinenkonstruktion und Justage des Phasenwinkels Master Stoker Ständer Referenzmarke am Ständer (verschiedene motorabhängige Formen) Läufer Referenzmarke am Läufer Bild 10-1 Referenzmarken bei 1FW6 Einbau-Torquemotoren (schematisch) Wenn folgender Zustand während der Drehung der Achse im Betrieb erreicht ist, sind die Phasenwinkel korrekt justiert: Die Referenzmarken aller Läufer fluchten immer zum selben Zeitpunkt mit der Referenzmarke des jeweils zugehörigen Ständers.
-
Seite 243: Anschlussbeispiele Für Den Parallelbetrieb
Fall nicht sein Bemessungsmoment M im Dauerbetrieb. • Stellen Sie den Phasenwinkel wie vorgeschrieben ein. Für Fragen stehen die Ansprechpartner der Siemens-Niederlassungen zur Verfügung. Sie erhalten z. B. Informationen zur optimalen Projektierung oder Auslegung von Antriebssystemen mit Torquemotoren im Parallelbetrieb. - Seite 244 Gekoppelte Motoren 10.4 Anschlussbeispiele für den Parallelbetrieb Bild 10-2 Anschluss des PTC 130 °C über SME12x Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 245 Gekoppelte Motoren 10.4 Anschlussbeispiele für den Parallelbetrieb Bild 10-3 Anschluss des PTC 130 °C über TM120 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 246 Gekoppelte Motoren 10.4 Anschlussbeispiele für den Parallelbetrieb Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
-
Seite 247: Anhang
Anhang Herstellerempfehlungen Hinweis zu Fremderzeugnissen Hinweis Empfehlung von Fremderzeugnissen Dieses Dokument enthält Empfehlungen von Fremderzeugnissen. Siemens kennt die grundsätzliche Eignung dieser Fremderzeugnisse. Sie können gleichwertige Erzeugnisse anderer Hersteller verwenden. Siemens übernimmt keine Gewährleistung für die Beschaffenheit von Fremderzeugnissen. A.1.1 Bezugsquellen für Anschlussteile und Zubehör für Kühlsysteme Parker Hannifin GmbH www.parker.com... -
Seite 248: Bezugsquellen Für Kühlaggregate
Anhang A.1 Herstellerempfehlungen A.1.2 Bezugsquellen für Kühlaggregate Pfannenberg GmbH www.pfannenberg.com BKW Kälte-Wärme-Versorgungstechnik GmbH www.bkw-kuema.de Helmut Schimpke Industriekühlanlagen GmbH + Co. KG www.schimpke.de Hydac International GmbH www.hydac.com Rittal GmbH & Co. KG www.rittal.de A.1.3 Bezugsquellen für Korrosionsschutzmittel TYFOROP CHEMIE GmbH Korrosionsschutz: www.tyfo.de Tyfocor Clariant Produkte (Deutschland) GmbH... -
Seite 249: Liste Der Abkürzungen
Anhang A.2 Liste der Abkürzungen Liste der Abkürzungen Berufsgenossenschaftliche Vorschriften; verbindliche Vorschriften für Sicherheit und Gesundheit am Arbeitsplatz in Deutschland; Unfallverhütungsvorschriften Communauté Européenne Deutsches Institut für Normung DRIVE-CLiQ Europäische Gemeinschaft Elektromotorische Kraft Elektromagnetische Verträglichkeit Europäische Norm Hochfrequenzdämpfung Hardware IATA International Air Transport Association Internationale Elektrotechnische Kommission International Protection Netzeinspeisung... -
Seite 250: Umweltverträglichkeit
Anhang A.3 Umweltverträglichkeit Umweltverträglichkeit A.3.1 Umweltverträglichkeit bei der Fertigung ● Das Verpackungsmaterial besteht hauptsächlich aus Kartonagen. ● Der Energieverbrauch bei der Produktion wurde optimiert. ● Die Produktion ist emissionsarm. A.3.2 Entsorgung Recycling und Entsorgung Für ein umweltverträgliches Recycling und die Entsorgung Ihres Altgeräts wenden Sie sich an einen zertifizierten Entsorgungsbetrieb für Elektro- und Elektronik-Altgeräte und entsorgen Sie das Altgerät entsprechend den jeweiligen Vorschriften in Ihrem Land. -
Seite 251: Entsorgung Von 1Fw6-Läufern
Anhang A.3 Umweltverträglichkeit Wesentliche Bestandteile einer fachgerechten Entsorgung ● Vollständige Entmagnetisierung der Komponenten, die Permanentmagnete enthalten ● Bauteile zur Verwertung trennen nach: – Elektronikschrott (z. B. Geberelektronik, Sensormodule) – Elektroschrott (z. B. Motorwicklungen, Leitungen) – Eisenschrott (z. B. Blechpakete) – Aluminium –... -
Seite 252: Entsorgung Der Verpackung
Anhang A.3 Umweltverträglichkeit A.3.2.3 Entsorgung der Verpackung Inhaltsstoffe der Verpackung und Entsorgung Die von uns verwendeten Verpackungen und Packhilfsmittel enthalten keine Problemstoffe. Sie sind mit Ausnahme von Holzwerkstoffen recyclingfähig und sollen grundsätzlich der Wiederverwertung zugeführt werden. Holzwerkstoffe sollen der thermischen Verwertung zugeführt werden. -
Seite 253: Index
Index Abbremsen, 81 Gebersystem, 76 Anwendungsbereich, 26 Genauigkeit, 24 Anziehdrehmomente, 122 Geräuschemissionen, 55 Aussetzbetrieb, 92 Auswertung Temp-F, Temp-S, 70 Axialkräfte, 114 Hotline, 5 Bauform, 34 IATA, 200 Befestigungsbohrung, 226 Isolationswiderstand, 64 Befestigungstechnik, 121 Bestellbezeichnungen, 40 Bestimmungsgemäße Verwendung, 26 Betriebsart Aussetzbetrieb, 92 Janus-Anordnung, 238 Dauerbetrieb, 91 Kurzzeitbetrieb, 91... - Seite 254 Motormontage, 109 Ständer mit doppeltem axialen Leitungsabgang, 228 Transport, 198 Maßblatt 1FW6092-8PCxx-xxB3 Verpackung, 198 Ständer mit einfachem axialen Leitungsabgang, 227 Siemens Service Center, 5 Maßblatt 1FW6152 Läufer, 232 STARTER, 88 Maßblatt 1FW6152-8PCxx-xxB3 Stoker, 238 Ständer mit doppeltem axialen Leitungsabgang, 231 Systemeinbindung, 208 Maßblatt 1FW6152-8PCxx-xxB3...
- Seite 255 Index Wärmeklasse, 34 Wicklungsisolierung, 34 Zertifikate EAC, 28 EG-Konformitätserklärung, 29 UL und cUL, 29 Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...
- Seite 256 Index Einbau-Torquemotoren 1FW6 High Speed Projektierungshandbuch, 10/2018, 6SN1197-0AE03-0AP0...