Beckhoff EL10 Serie Dokumentation
Digitale eingangsklemmen
Quicklinks
Kapitel

Verwandte Anleitungen für Beckhoff EL10 Serie








Inhaltszusammenfassung für Beckhoff EL10 Serie
- Seite 1 Dokumentation EL10xx, EL11xx Digitale Eingangsklemmen Version: Datum: 02.09.2016...
-
Seite 3: Produktübersicht Ethercat Digitale Eingangsklemmen
Produktübersicht EtherCAT digitale Eingangsklemmen Produktübersicht EtherCAT digitale Eingangsklemmen EL1002, EL1004, EL1008 [} 13] (2, 4, 8 Kanal; 24 V , 3 ms Eingangsfilter) EL1012, EL1014, EL1018 [} 18] (2, 4, 8 Kanal; 24 V , 10 µs Eingangsfilter) EL1024 [} 23] (4 Kanal; 24 V , 3 ms Eingangsfilter für Typ 2-Sensoren) EL1034 [} 23] (4 Kanal;... -
Seite 4: Inhaltsverzeichnis
Inhaltsverzeichnis Inhaltsverzeichnis 1 Produktübersicht EtherCAT digitale Eingangsklemmen............... 3 2 Vorwort ............................... 6 2.1 Hinweise zur Dokumentation ...................... 6 2.2 Sicherheitshinweise .......................... 7 2.3 Ausgabestände der Dokumentation .................... 8 2.4 Versionsidentifikation EtherCAT Geräte ..................... 9 3 Produktübersicht............................. 13 3.1 EL1002, EL1004, EL1008 Einführung .................... 13 3.1.1 EL1002 –... - Seite 5 Inhaltsverzeichnis 6.1.1 Installation TwinCAT Realtime Treiber .................. 52 6.1.2 Hinweise ESI-Gerätebeschreibung.................. 58 6.1.3 OFFLINE Konfigurationserstellung .................. 62 6.1.4 ONLINE Konfigurationserstellung .................. 67 6.1.5 Allgemeine Slave PDO Konfiguration .................. 75 6.1.6 Konfiguration mit dem TwinCAT System Manager - Digitale Eingangs - und Ausgangsklem- men ............................
-
Seite 6: Vorwort
Patente: EP0851348, US6167425 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizensiert durch die Beckhoff Automation GmbH, Deutschland Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind verboten, soweit nicht ausdrücklich gestattet. -
Seite 7: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 8: Ausgabestände Der Dokumentation
Vorwort Ausgabestände der Dokumentation Version Kommentar - Strukturupdate - Aktualisierungen in Kapitel "Technische Daten" - Aktualisierungen in Kapitel "LEDs und Anschluss" - Strukturupdate - Aktualisierungen in Kapitel "Technische Daten" - Strukturupdate - Korrekturen in Kapitel "Anwendungshinweise" - Austausch Kapitel "Konfiguration mit dem TwinCAT System Manager" > "Konfiguration mit dem TwinCAT System Manager –... -
Seite 9: Versionsidentifikation Ethercat Geräte
Dokumentation angegeben. Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL- Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“. -
Seite 10: Eindeutige Seriennummer/Id, Id-Nummer
Vorwort Aufbau der Seriennummer: KK YY FF HH KK - Produktionswoche (Kalenderwoche) YY - Produktionsjahr FF - Firmware-Stand HH - Hardware-Stand Beispiel mit Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 - Hardware-Stand 02 Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehe jeweilige Gerätedokumentation):... -
Seite 11: Abb. 2 Ek1100 Ethercat Koppler, Standard Ip20-Io-Gerät Mit Chargennummer
Vorwort Abb. 2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Chargennummer Abb. 3: CU2016 Switch mit Chargennummer Abb. 4: EL3202-0020 mit Chargennummern 26131006 und eindeutiger ID-Nummer 204418 EL10xx, EL11xx Version: 4.3... -
Seite 12: Abb. 5: Ep1258-00001 Ip67 Ethercat Box Mit Chargennummer 22090101 Und Eindeutiger Seriennummer 158102
Vorwort Abb. 5: EP1258-00001 IP67 EtherCAT Box mit Chargennummer 22090101 und eindeutiger Seriennummer 158102 Abb. 6: EP1908-0002 IP76 EtherCAT Safety Box mit Chargennummer 071201FF und eindeutiger Seriennummer 00346070 Abb. 7: EL2904 IP20 Safety Klemme mit Chargennummer/DateCode 50110302 und eindeutiger Seriennummer 00331701 Version: 4.3 EL10xx, EL11xx... -
Seite 13: Produktübersicht
Produktübersicht Produktübersicht EL1002, EL1004, EL1008 Einführung Zwei-, vier- und achtkanalige digitale Eingangsklemmen 24 V , 3 ms Eingangsfilter Die digitalen Eingangsklemmen EL1002, EL1004 und 1008 erfassen binäre Steuersignale aus der Prozessebene und transportieren sie galvanisch getrennt zum übergeordneten Automatisierungsgerät. Sie unterscheiden sich durch die Anzahl der Kanäle und die Anschlussbelegung. Die digitalen Eingangsklemmen der Serie EL100x verfügen über einen Eingangsfilter (3 ms) und zeigen ihren Signalzustand durch eine Leuchtdiode pro Kanal an. -
Seite 14: El1002 - Leds Und Anschlussbelegung
Produktübersicht 3.1.1 EL1002 – LEDs und Anschlussbelegung Abb. 8: EL1002 EL1002 – LEDs Farbe Bedeutung INPUT 1 grün Signalspannung "0" (-3 V ... 5 V) INPUT 2 Signalspannung "1" (11 V ... 30 V) EL1002 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 +24 V Sensor-Versorgung für Eingang 1 (intern verbunden mit Klemmstelle 6 und positiven Powerkontakt) -
Seite 15: El1004 - Leds Und Anschlussbelegung
Produktübersicht 3.1.2 EL1004 – LEDs und Anschlussbelegung Abb. 9: EL1004 EL1004 – LEDs Farbe Bedeutung INPUT 1 - 4 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (11 V ... 30 V) EL1004 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 +24 V Sensor-Versorgung für Eingang 1 (intern verbunden mit Klemmstelle 3, 6, 7 und positiven Powerkontakt) +24 V... -
Seite 16: El1008 - Leds Und Anschlussbelegung
Produktübersicht 3.1.3 EL1008 – LEDs und Anschlussbelegung Abb. 10: EL1008 EL1008 – LEDs Farbe Bedeutung INPUT 1 - 8 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (11 V ... 30 V) EL1008 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 Input 3 Eingang 3 Input 5 Eingang 5... -
Seite 17: El1002, El1004, El1008 - Technische Daten
Produktübersicht 3.1.4 EL1002, EL1004, EL1008 - Technische Daten Technische Daten EL1002 EL1004 EL1008 Digitale Eingänge Anzahl der gleichzeitig 2 (> +55°C ) 4 (-25°C ... +55°C) 8 (-25°C ... +55°C) ansteuerbaren Eingänge 2 ( > +55°C) 4 ( > +55°C) abhängig von (angereiht in waagerechter Einbaulage) Umgebungstemperatur [} 47] Nennspannung der... -
Seite 18: El1012, El1014, El1018 - Einführung
Produktübersicht EL1012, EL1014, EL1018 - Einführung Zwei-, vier- und achtkanalige digitale Eingangsklemmen 24 V , 10 µs Eingangsfilter Die digitalen Eingangsklemmen EL101x erfassen binäre Steuersignale aus der Prozessebene und transportieren sie galvanisch getrennt zum übergeordneten Automatisierungsgerät. Sie unterscheiden sich durch die Anzahl der Kanäle und die Anschlussbelegung. Die digitalen Eingangsklemmen der Serie EL101x verfügen über einen Eingangsfilter (10 µs) und zeigen ihren Signalzustand durch eine Leuchtdiode pro Kanal Version: 4.3 EL10xx, EL11xx... -
Seite 19: El1012 - Leds Und Anschlussbelegung
Produktübersicht 3.2.1 EL1012 – LEDs und Anschlussbelegung Abb. 11: EL1012 EL1012 – LEDs Farbe Bedeutung INPUT 1 grün Signalspannung "0" (-3 V ... 5 V) INPUT 2 Signalspannung "1" (11 V ... 30 V) EL1012 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 +24 V Sensor-Versorgung für Eingang 1 (intern verbunden mit Klemmstelle 6 und positiven Powerkontakt) 0 V... -
Seite 20: El1014 - Leds Und Anschlussbelegung
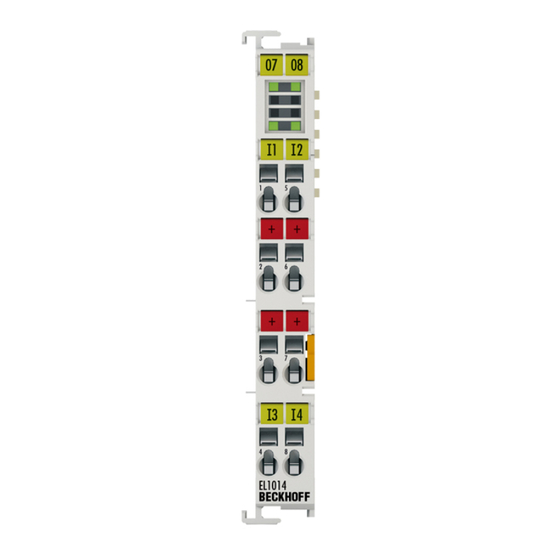
Produktübersicht 3.2.2 EL1014 – LEDs und Anschlussbelegung Abb. 12: EL1014 EL1014 – LEDs Farbe Bedeutung INPUT 1 - 4 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (11 V ... 30 V) EL1014 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 +24 V Sensor-Versorgung für Eingang 1 (intern verbunden mit Klemmstelle 3, 6, 7 und positiven Powerkontakt) +24 V... -
Seite 21: El1018 - Leds Und Anschlussbelegung
Produktübersicht 3.2.3 EL1018 – LEDs und Anschlussbelegung Abb. 13: EL1018 EL1018 – LEDs Farbe Bedeutung INPUT 1 - 8 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (11 V ... 30 V) EL1018 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 Input 3 Eingang 3 Input 5 Eingang 5... -
Seite 22: El1012, El1014, El1018 - Technische Daten
Produktübersicht 3.2.4 EL1012, EL1014, EL1018 - Technische Daten Technische Daten EL1012 EL1014 EL1018 Digitale Eingänge Anzahl der gleichzeitig 2 (> +55°C ) 4 (-25°C ... +55°C) 8 (-25°C ... +55°C) ansteuerbaren Eingänge 2 ( > +55°C) 4 ( > +55°C) abhängig von (angereiht in waagerechter Einbaulage Umgebungstemperatur [} 47]) Nennspannung der... -
Seite 23: El1024, El1034 - Einführung
Produktübersicht EL1024, EL1034 - Einführung EL1024 - Vierkanalige digitale Eingangsklemmen 24 V für Typ-2-Sensoren EL1034 - Vierkanalige digitale Eingangsklemmen 24 V , potentialfreie Eingänge Die digitale Eingangsklemme EL1024 erfasst die binären 24 V-Steuersignale und transportiert sie galvanisch getrennt zum übergeordneten Automatisierungssystem. Die EtherCAT-Klemme enthält je vier Kanäle, die ihren Signalzustand durch Leuchtdioden anzeigen. -
Seite 24: El1024 - Leds Und Anschlussbelegung
Produktübersicht 3.3.1 EL1024 – LEDs und Anschlussbelegung Abb. 14: EL1024 EL1024 – LEDs Farbe Bedeutung INPUT 1 - 4 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (11 V ... 30 V) EL1024 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 +24 V Sensor-Versorgung für Eingang 1 (intern verbunden mit Klemmstelle 3, 6, 7 und positiven Powerkontakt) +24 V... -
Seite 25: El1034 - Leds Und Anschlussbelegung
Produktübersicht 3.3.2 EL1034 – LEDs und Anschlussbelegung Abb. 15: EL1034 EL1034 – LEDs Farbe Bedeutung INPUT 1 - 4 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (15 V ... 30 V) EL1034 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 GND 1 Masse (GND) 1 GND 3 Masse (GND) 3... -
Seite 26: El1024, El1034 - Technische Daten
Produktübersicht 3.3.3 EL1024, EL1034 - Technische Daten Technische Daten EL1024 EL1034 digitale Eingänge 4 (potentialfrei) Nennspannung der Eingänge 24 V (-15% / +20%) Signalspannung "0" -3 V ... 5 V (EN 61131-2, Typ 2) -3 V ... 5 V (EN 61131-2, Typ 1) Signalspannung "1" 11 V ... 30 V (EN 61131-2, Typ 2) 15 V ... -
Seite 27: El1084, El1094 - Leds Und Anschlussbelegung
Produktübersicht 3.4.1 EL1084, EL1094 - LEDs und Anschlussbelegung Abb. 16: EL1084, EL1094 EL1084, EL1094 – LEDs Farbe Bedeutung INPUT 1 - 4 grün Signalspannung "0" (18 V ... 30 V) Signalspannung "1" (0 V ... 7 V) EL1084, EL1094 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 0 V... -
Seite 28: El1088, El1098 - Leds Und Anschlussbelegung
Produktübersicht 3.4.2 EL1088, EL1098 - LEDs und Anschlussbelegung Abb. 17: EL1088, EL1098 EL1088, EL1098 – LEDs Farbe Bedeutung INPUT 1 - 8 grün Signalspannung "0" (18 V ... 30 V) Signalspannung "1" (0 V ... 7 V) EL1088, EL1098 – Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 Input 3... -
Seite 29: El1084, El1088, El1094, El1098 - Technische Daten
Produktübersicht 3.4.3 EL1084, EL1088, EL1094, EL1098 - Technische Daten Technische Daten EL1084 EL1088 EL1094 EL1098 digitale Eingänge Nennspannung der Eingänge 24 V (-15% / +20%) Signalspannung "0" 18 V ... 30 V Signalspannung "1" 0 V ... 7 V Eingangsfilter 3 ms 3 ms 10 µs 10 µs Eingangsstrom typ. 3 mA Stromaufnahme 20 mA typ. -
Seite 30: El1104, El1114 - Leds Und Anschlussbelegung
Produktübersicht 3.5.1 EL1104, EL1114 - LEDs und Anschlussbelegung Abb. 18: EL1104 EL1104, EL1114 - LEDs Farbe Bedeutung INPUT 1 - 4 grün Signalspannung "0" (-3 V ... 5 V) Signalspannung "1" (11 V ... 30 V) EL1104, EL1114 - Anschlussbelegung Klemmstelle Beschreibung Bezeich- nung Input 1 Eingang 1 +24 V Sensor-Versorgung +24 V (intern verbunden mit Klemmstelle 6 und positiven... -
Seite 31: El1104, El1114 - Technische Daten
Produktübersicht 3.5.2 EL1104, EL1114 - Technische Daten Technische Daten EL1104 EL1114 digitale Eingänge Nennspannung der Eingänge 24 V (-15% / +20%) Anzahl der gleichzeitig 4 (-25°C ... +55°C) 4 (0°C ... +55°C) ansteuerbaren Eingänge abhängig 2 ( > +55°C) von Umgebungstemperatur Signalspannung "0" -3 V ... 5 V (EN 61131-2, Typ 1/3) Signalspannung "1"... -
Seite 32: El1124, El1144, El1134 - Leds Und Anschlussbelegung
Produktübersicht 3.6.1 EL1124, EL1144, EL1134 - LEDs und Anschlussbelegung Abb. 19: EL1124 EL1124, EL1144, EL1134 – LEDs Farbe Bedeutung INPUT 1 - 4 grün EL1124: Signalspannung "0" (< 0,8 V) EL1144: Signalspannung "0" (< 2,4 V) EL1134: Signalspannung "0" (-3…5 V) EL1124: Signalspannung "1" (> 2,4 V) EL1144: Signalspannung "1"... -
Seite 33: El1124, El1144, El1134 - Technische Daten
Produktübersicht 3.6.2 EL1124, EL1144, EL1134 - Technische Daten Technische Daten EL1124 EL1144 EL1134 Digitale Eingänge Nennspannung der 5 V 12 V 48 V Eingänge Signalspannung "0" < 0,8 V < 2,4 V -3...5 V (IEC 61131-2, Typ 1) Signalspannung "1" >2,4 V > 8,5 V 15…30 V (IEC 61131-2, Typ 1) Eingangsfilter <<1 µs (50 ns typ.) 10 µs... -
Seite 34: Anwendungshinweise
Produktübersicht Anwendungshinweise Allgemeiner Hinweis Zur ordnungsgemäßen Funktion der Eingangsschaltung wird bei folgenden Serien die Powerspannung benötigt: Powerspannung 24 V • EL100x • EL101x • EL1104, EL1114 • EL18xx Powerspannung 5 V • EL1124 Hinweise zur Serie EL1x1x (10 µs typ.) Verwendung zur Frequenzmessung Durch die schnellen Eingangsfilter von typ. -
Seite 35: Grundlagen Der Kommunikation
Receiver Data - Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten von Beckhoff sowohl symmetrisch (1:1) belegte als auch Cross-Over-Kabel verwenden. Empfohlene Kabel Geeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Web- site! Hinweis E-Bus-Versorgung Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, i.d.R. -
Seite 36: Allgemeine Hinweise Zur Watchdog-Einstellung
Grundlagen der Kommunikation Abb. 20: Systemmanager Stromberechnung Fehlfunktion möglich! Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demsel- ben Massepotential erfolgen! Achtung Allgemeine Hinweise zur Watchdog-Einstellung Die ELxxxx Klemmen sind mit einer Sicherungseinrichtung (Watchdog) ausgestattet, die z.B. bei unterbrochenem Prozessdatenverkehr nach einer voreinstellbaren Zeit die Ausgänge in einen sicheren Zustand schaltet, in Abhängigkeit vom Gerät und Einstellung z.B. -
Seite 37: Abb. 21 Karteireiter Ethercat -> Erweiterte Einstellungen -> Verhalten --> Watchdog
Grundlagen der Kommunikation Abb. 21: Karteireiter EtherCAT -> Erweiterte Einstellungen -> Verhalten --> Watchdog Anmerkungen: • der Multiplier ist für beide Watchdogs gültig. • jeder Watchdog hat dann noch eine eigene Timereinstellung, die zusammen mit dem Multiplier eine resultierende Zeit ergibt. •... -
Seite 38: Berechnung
Grundlagen der Kommunikation EtherCAT-Master oder sehr lange Zykluszeiten anzupassen. Der Standardwert des SM-Watchdog ist auf 100 ms eingestellt. Der Einstellbereich umfasst 0..65535. Zusammen mit einem Multiplier in einem Bereich von 1..65535 deckt dies einen Watchdog-Zeitraum von 0..~170 Sekunden ab. Berechnung Multiplier = 2498 →... -
Seite 39: Coe-Interface: Hinweis
Im Zustand Boot ist Mailbox-Kommunikation über das Protokoll File-Access over EtherCAT (FoE) möglich, aber keine andere Mailbox-Kommunikation und keine Prozessdaten-Kommunikation. CoE-Interface: Hinweis Dieses Gerät hat kein CoE. Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der Beckhoff Website. EL10xx, EL11xx Version: 4.3... -
Seite 40: Distributed Clock
Grundlagen der Kommunikation Distributed Clock Die Distributed Clock stellt eine lokale Uhr im EtherCAT Slave Controller (ESC) dar mit den Eigenschaften: • Einheit 1 ns • Nullpunkt 1.1.2000 00:00 • Umfang 64 Bit (ausreichend für die nächsten 584 Jahre); manche EtherCAT-Slaves unterstützen jedoch nur einen Umfang von 32 Bit, d.h. -
Seite 41: Montage Und Verdrahtung
Montage und Verdrahtung Montage und Verdrahtung Tragschienenmontage Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes mög- lich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor WARNUNG Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen! Montage Abb. 23: Montage auf Tragschiene Die Buskoppler und Busklemmen werden durch leichten Druck auf handelsübliche 35 mm Tragschienen (Hutschienen nach EN 60715) aufgerastet: 1. -
Seite 42: Verbindungen Innerhalb Eines Busklemmenblocks
Montage und Verdrahtung Demontage Abb. 24: Demontage von Tragschiene Jede Klemme wird durch eine Verriegelung auf der Tragschiene gesichert, die zur Demontage gelöst werden muss: 1. Ziehen Sie die Klemme an ihren orangefarbigen Laschen ca. 1 cm von der Tragschiene herunter. Da- bei wird die Tragschienenverriegelung dieser Klemme automatisch gelöst und sie können die Klemme nun ohne großen Kraftaufwand aus dem Busklemmenblock herausziehen. -
Seite 43: Montagevorschriften Für Klemmen Mit Erhöhter Mechanischer Belastbarkeit
Montage und Verdrahtung Abb. 25: Linksseitiger Powerkontakt Beschädigung des Gerätes möglich Beachten Sie, dass aus EMV-Gründen die PE-Kontakte kapazitiv mit der Tragschiene ver- bunden sind. Das kann bei der Isolationsprüfung zu falschen Ergebnissen und auch zur Achtung Beschädigung der Klemme führen (z. B. Durchschlag zur PE-Leitung bei der Isolationsprü- fung eines Verbrauchers mit 230 V Nennspannung). -
Seite 44: Zusätzliche Montagevorschriften
Montage und Verdrahtung Zusätzliche Montagevorschriften Für die Klemmen mit erhöhter mechanischer Belastbarkeit gelten folgende zusätzliche Montagevorschriften: • Die erhöhte mechanische Belastbarkeit gilt für alle zulässigen Einbaulagen • Es ist eine Tragschiene nach EN 60715 TH35-15 zu verwenden • Der Klemmenstrang ist auf beiden Seiten der Tragschiene durch eine mechanische Befestigung, z.B. mittels einer Erdungsklemme oder verstärkten Endklammer zu fixieren •... -
Seite 45: Abb. 27 Steckbare Verdrahtung
Montage und Verdrahtung Steckbare Verdrahtung Abb. 27: Steckbare Verdrahtung Die Klemmen der Serien KSxxxx und ESxxxx enthalten eine steckbare Anschlussebene. Montage und Verdrahtung werden wie bei den Serien KLxxxx und ELxxxx durchgeführt. Im Servicefall erlaubt die steckbare Anschlussebene, die gesamte Verdrahtung als einen Stecker von der Gehäuseoberseite abzuziehen. -
Seite 46: Abb. 29 Befestigung Einer Leitung An Einem Klemmenanschluss
Montage und Verdrahtung Verdrahtung Klemmen für Standardverdrahtung ELxxxx / KLxxxx und Klemmen für stehende Verdrahtung ESxxxx / KSxxxx Abb. 29: Befestigung einer Leitung an einem Klemmenanschluss Bis zu acht Anschlüsse ermöglichen den Anschluss von massiven oder feindrähtigen Leitungen an die Busklemmen. Die Klemmen sind in Federkrafttechnik ausgeführt. Schließen Sie die Leitungen folgendermaßen an: 1. -
Seite 47: Schirmung
Montage und Verdrahtung Schirmung Schirmung Analoge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitungen angeschlossen werden. Hinweis Einbaulagen Einschränkung von Einbaulage und Betriebstemperaturbereich Entnehmen Sie den technischen Daten zu einer Klemme, ob sie Einschränkungen bei Ein- baulage und/oder Betriebstemperaturbereich unterliegt. Sorgen Sie bei der Montage von Achtung Klemmen mit erhöhter thermischer Verlustleistung dafür, dass im Betrieb oberhalb und un- terhalb der Klemmen ausreichend Abstand zu anderen Komponenten eingehalten wird, so... -
Seite 48: Montage Von Passiven Klemmen
Montage und Verdrahtung Weitere Einbaulagen Alle anderen Einbaulagen zeichnen sich durch davon abweichende räumliche Lage der Tragschiene aus, s. Abb. „Weitere Einbaulagen“. Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zur Umgebung. Abb. 31: Weitere Einbaulagen Montage von passiven Klemmen Hinweis zur Montage von Passiven Klemmen EtherCAT-Busklemmen (ELxxxx / ESxxxx), die nicht aktiv am Datenaustausch innerhalb des Busklemmenblocks teilnehmen, werden als passive Klemmen bezeichnet. -
Seite 49: Abb. 32 Korrekte Konfiguration
Montage und Verdrahtung Beispiele für Montage von passiven Klemmen (hell eingefärbt) Abb. 32: Korrekte Konfiguration Abb. 33: Inkorrekte Konfiguration EL10xx, EL11xx Version: 4.3... -
Seite 50: Atex - Besondere Bedingungen
80°C ist, so müssen Kabel ausgewählt werden, deren Temperaturdaten den tatsächlich gemessenen Temperaturwerten entsprechen! • Beachten Sie beim Einsatz von Beckhoff-Feldbuskomponenten in explosions- gefährdeten Bereichen den zulässigen Umgebungstemperaturbereich von 0 - 55°C! • Es müssen Maßnahmen zum Schutz gegen Überschreitung der Nennbetriebsspannung durch kurzzeitige Störspannungen um mehr als 40% getroffen werden! -
Seite 51: Kennzeichnung
Montage und Verdrahtung Kennzeichnung Die für den explosionsgefährdeten Bereich zertifizierten Beckhoff-Feldbuskomponenten tragen eine der folgenden Kennzeichnungen: II 3 G Ex nA II T4 KEMA 10ATEX0075 X Ta: 0 - 55°C oder II 3 G Ex nA nC IIC T4 KEMA 10ATEX0075 X Ta: 0 - 55°C EL10xx, EL11xx Version: 4.3... -
Seite 52: Inbetriebnahme
In den folgenden Kapiteln wird dem Anwender die Inbetriebnahme der TwinCAT Entwicklungsumgebung auf einem PC System der Steuerung sowie die wichtigsten Funktionen einzelner Steuerungselemente erläutert. Bitte sehen Sie weitere Informationen zu TwinCAT 2 und TwinCAT 3 unter http://infosys.beckhoff.de/. 6.1.1 Installation TwinCAT Realtime Treiber Um einen Standard Ethernet Port einer IPC Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, ist... -
Seite 53: Abb. 34 Aufruf Im Systemmanager (Twincat 2)
Inbetriebnahme Abb. 34: Aufruf im Systemmanager (TwinCAT 2) Unter TwinCAT 3 ist dies über das Menü unter „TwinCAT“ erreichbar: Abb. 35: Aufruf in VS Shell (TwinCAT 3) Der folgende Dialog erscheint: Abb. 36: Übersicht Netzwerkschnittstellen Hier können nun Schnittstellen, die unter "Kompatible Geräte" aufgeführt sind, über den "Install" Button mit dem Treiber belegt werden. -
Seite 54: Abb. 37 Eigenschaft Von Ethercat Gerät (Twincat 2): Klick Auf „Kompatible Geräte
Inbetriebnahme Abb. 37: Eigenschaft von EtherCAT Gerät (TwinCAT 2): Klick auf „Kompatible Geräte…“ von „Adapter“ TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“ geöffnet werden: Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnen Netzwerkschnittstelle (Windows Start →... -
Seite 55: Abb. 39 Beispielhafte Korrekte Treiber-Einstellung Des Ethernet Ports
Inbetriebnahme Abb. 39: Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports Andere mögliche Einstellungen sind zu vermeiden: EL10xx, EL11xx Version: 4.3... -
Seite 56: Abb. 40 Fehlerhafte Treiber-Einstellungen Des Ethernet Ports
Inbetriebnahme Abb. 40: Fehlerhafte Treiber-Einstellungen des Ethernet Ports Version: 4.3 EL10xx, EL11xx... -
Seite 57: Abb. 41 Tcp/Ip-Einstellung Des Ethernet Ports
Inbetriebnahme IP-Adresse des verwendeten Ports IP Adresse/DHCP In den meisten Fällen wird ein Ethernet-Port, der als EtherCAT-Gerät konfiguriert wird, kei- ne allgemeinen IP-Pakete transportieren. Deshalb und für den Fall, dass eine EL6601 oder Hinweis entsprechende Geräte eingesetzt werden, ist es sinnvoll, über die Treiber-Einstellung "In- ternet Protocol TCP/IP"... -
Seite 58: Hinweise Esi-Gerätebeschreibung
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0010) beschreibt die Funktion des Gerätes. Die Revision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z.B. in der Dokumentation nicht anders angegeben. - Seite 59 Achtung a) für das Gerät EL2521-0000 liegt überhaupt keine ESI vor, weder für die Revision 1019 noch für eine ältere Revision. Dann ist vom Hersteller (hier: Beckhoff) die ESI anzufor- dern. b) für das Gerät EL2521-0000 liegt eine ESI nur in älterer Revision vor, z.B. 1018 oder 1017.
- Seite 60 Inbetriebnahme Der System Manager legt bei „online“ erfassten Gerätebeschreibungen in seinem ESI-Verzeichnis eine neue Datei "OnlineDescription0000...xml" an, die alle online ausgelesenen ESI-Beschreibungen enthält. Abb. 45: Vom Systemmanager angelegt OnlineDescription.xml Soll daraufhin ein Slave manuell in die Konfiguration eingefügt werden, sind „online“ erstellte Slaves durch ein vorangestelltes „>“...
- Seite 61 Inbetriebnahme Abb. 47: Hinweisfenster fehlerhafte ESI-Datei (links: TwinCAT 2; rechts: TwinCAT 3) Ursachen dafür können sein • Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei → prüfen Sie die Ihnen vorliegenden Schemata • Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden → Es ist der Hersteller der Datei zu kontaktieren EL10xx, EL11xx Version: 4.3...
-
Seite 62: Offline Konfigurationserstellung
Inbetriebnahme 6.1.3 OFFLINE Konfigurationserstellung Anlegen des Geräts EtherCAT In einem leeren System Manager Fenster muss zuerst ein EtherCAT Gerät angelegt werden. Abb. 48: Anfügen eines EtherCAT Device: links TwinCAT 2; rechts TwinCAT 3 Für eine EtherCAT I/O Anwendung mit EtherCAT Slaves ist der "EtherCAT" Typ auszuwählen. "EtherCAT Automation Protocol via EL6601"... -
Seite 63: Definieren Von Ethercat Slaves
Inbetriebnahme Abb. 51: Eigenschaften EtherCAT Gerät (TwinCAT 2) TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“ geöffnet werden: Auswahl Ethernet Port Es können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der Twin- CAT Realtime-Treiber installiert ist. - Seite 64 Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden, z. B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neues EtherCAT Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzte Version: 4.3...
- Seite 65 Abb. 56: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
- Seite 66 Inbetriebnahme Abb. 57: EtherCAT Klemme im TwinCAT-Baum (links: TwinCAT 2; rechts: TwinCAT 3) Version: 4.3 EL10xx, EL11xx...
-
Seite 67: Online Konfigurationserstellung
Inbetriebnahme 6.1.4 ONLINE Konfigurationserstellung Erkennen/Scan des Geräts EtherCAT Befindet sich das TwinCAT-System im CONFIG-Modus, kann online nach Geräten gesucht werden. Erkennbar ist dies durch ein Symbol unten rechts in der Informationsleiste: • bei TwinCAT 2 durch eine blaue Anzeige „Config Mode“ im System Manager-Fenster: •... -
Seite 68: Erkennen/Scan Der Ethercat Teilnehmer
Inbetriebnahme Abb. 60: Hinweis automatischer GeräteScan (links: TwinCAT 2; rechts: TwinCAT 3) Ethernet Ports mit installierten TwinCAT Realtime-Treiber werden als "RT-Ethernet" Geräte angezeigt. Testweise wird an diesen Ports ein EtherCAT-Frame verschickt. Erkennt der Scan-Agent an der Antwort, dass ein EtherCAT-Slave angeschlossen ist, wird der Port allerdings gleich als "EtherCAT Device" angezeigt. - Seite 69 Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen mit Klemmen EL2521-0025-1018 angelegt. Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019.
- Seite 70 Inbetriebnahme Dazu kommt, dass durch produktionsbegleitende Entwicklung in Firma A das neue Feature C der EL2521-0025-1019 (zum Beispiel ein verbesserter Analogfilter oder ein zusätzliches Prozessdatum zur Diagnose) gerne entdeckt und ohne betriebsinterne Rücksprache genutzt wird. Für die so entstandene neue Konfiguration "B2.tsm"...
- Seite 71 Inbetriebnahme Abb. 69: Anzeige des Wechsels zwischen „Free Run“ und „Config Mode“ unten rechts in der Statusleiste Abb. 70: TwinCAT kann auch durch einen Button in diesen Zustand versetzt werden (links: TwinCAT 2; rechts TwinCAT 3) Das EtherCAT System sollte sich danach in einem funktionsfähigen zyklischen Betrieb nach Abb. „Beispielhafte Online-Anzeige“...
-
Seite 72: Scan Über Bestehender Konfiguration
(Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder "Copy" sollte Achtung nur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s.o.) nur mit Bedacht vorgenom- men werden. Das Gerät wird dann in der Konfiguration gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten und Funktionen haben. - Seite 73 Inbetriebnahme Abb. 74: Korrekturdialog Die Anzeige der "Extended Information" wird empfohlen, weil dadurch Unterschiede in der Revision sichtbar werden. Farbe Erläuterung grün Dieser EtherCAT Slave findet seine Entsprechung auf der Gegenseite. Typ und Revision stimmen überein. blau Dieser EtherCAT Slave ist auf der Gegenseite vorhanden, aber in einer anderen Revision. Diese andere Revision kann andere Default-Einstellungen der Prozessdaten und andere/ zusätzliche Funktionen haben.
- Seite 74 Abb. 75: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 75: Allgemeine Slave Pdo Konfiguration
Abb. 77: Dialog “Change to Compatible Type…” (links: TwinCAT 2; rechts TwinCAT 3) Diese Funktion ist vorzugsweise auf AX5000-Geräten anzuwenden. Wenn aufgerufen, schlägt TwinCAT die Geräte vor die er im zugehörigen Unterordner findet, beim AX5000 z.B. in \TwinCAT\IO\EtherCAT\Beckhoff AX5xxx. Change to Alternative Type Der TwinCAT System Manager bietet eine Funktion zum Austauschen eines Gerätes: Change to Alternative... -
Seite 76: Konfiguration Mit Dem Twincat System Manager - Digitale Eingangs - Und Ausgangsklemmen
Inbetriebnahme Ist lt. Gerätedokumentation eine Veränderung der Prozessdaten zulässig, kann dies wie folgt vorgenommen werden, s. Abb. „Konfigurieren der Prozessdaten“. • A: Wählen Sie das zu konfigurierende Gerät • B: im Reiter "Process Data"in der Input- oder Output-Syncmanager zu wählen (C) •... - Seite 77 Inbetriebnahme Im rechten Fenster des TwinCAT System Managers stehen Ihnen nun verschiedene Karteireiter zur Konfiguration der Klemme zur Verfügung. Karteireiter Allgemein Abb. 80: Karteireiter Allgemein Name Name des EtherCAT-Geräts Laufende Nr. des EtherCAT-Geräts Typ des EtherCAT-Geräts Kommentar Hier können Sie einen Kommentar (z.B. zum Anlagenteil) hinzufügen. Disabled Hier können Sie das EtherCAT-Gerät deaktivieren.
- Seite 78 Inbetriebnahme Typ des EtherCAT-Geräts Product/Revision Produkt- und Revisions-Nummer des EtherCAT-Geräts Auto Inc Adr. Auto-Inkrement-Adresse des EtherCAT-Geräts. Die Auto-Inkrement-Adresse kann benutzt werden, um jedes EtherCAT-Gerät anhand seiner physikalischen Position im Kommunikationsring zu adressieren. Die Auto-Inkrement- Adressierung wird während der Start-Up-Phase benutzt, wenn der EtherCAT- master die Adressen an die EtherCAT-Geräte vergibt.
-
Seite 79: Pdo-Zuordnung
Inbetriebnahme PDO-Zuordnung PDO-Zuordnung des ausgewählten Sync-Managers. Hier werden alle für diesen Sync-Manager-Type definierten PDOs aufgelistet. Die markierten Einträge sind die PDOs, die an der Prozessdatenübertragung teilnehmen. Diese PDOs werden in der Baumdarstellung des System-Managers als Variablen des EtherCAT-Geräts angezeigt. Der Name der Variable ist identisch mit dem Parameter Name des PDO, wie er in der PDO-Liste angezeigt wird. -
Seite 80: Karteireiter Online
Inbetriebnahme Karteireiter Online Abb. 83: Karteireiter Online Status Maschine Init Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Init zu setzen. Pre-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Pre-Operational zu setzen. Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Operational zu setzen. -
Seite 81: Allgemeine Inbetriebnahmehinweise Des Ethercat Slaves
Inbetriebnahme Tab. 1: File Access over EtherCAT Download Inaktiv bei nichtintelligenten Klemmen. Upload Inaktiv bei nichtintelligenten Klemmen. Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves In dieser Übersicht werden in Kurzform einige Aspekte des EtherCAT Slave Betriebs unter TwinCAT behandelt. Ausführliche Informationen dazu sind entsprechenden Fachkapiteln z.B. in der EtherCAT- Systemdokumentation zu entnehmen. - Seite 82 Variablen über ADS sinnvoll. In Abb. „Grundlegende EtherCAT Slave Diagnose in der PLC“ ist eine Beispielimplementation einer grundlegenden EtherCAT Slave Diagnose zu sehen. Dabei wird eine Beckhoff EL3102 (2 kanalige analoge Eingangsklemme) verwendet, da sie sowohl über slave-typische Kommunikationsdiagnose als auch über kanal-spezifische Funktionsdiagnose verfügt.
- Seite 83 Inbetriebnahme Kennzeichen Funktion Ausprägung Anwendung/Auswertung Diagnoseinformationen des Ether- Zumindest der DevState ist in der CAT Master PLC zyklusaktuell auszuwerten. zyklisch aktualisiert (gelb) oder azy- Die Diagnoseinformationen des klisch bereitgestellt (grün). EtherCAT Master bieten noch weitaus mehr Möglichkeiten, die in der EtherCAT-Systemdokumentation behandelt werden.
- Seite 84 Inbetriebnahme Abb. 86: EL3102, CoE-Verzeichnis EtherCAT-Systemdokumentation Es ist die ausführliche Beschreibung in der EtherCAT-Systemdokumentation (EtherCAT Grundlagen --> CoE Interface) zu beachten! Hinweis Einige Hinweise daraus in Kürze: • Es ist geräteabhängig, ob Veränderungen im Online-Verzeichnis slave-lokal gespeichert werden. EL- Klemmen (außer den EL66xx) verfügen über diese Speichermöglichkeit. •...
- Seite 85 Inbetriebnahme Abb. 87: Beispiel Inbetriebnahmehilfe für eine EL3204 Diese Inbetriebnahme verwaltet zugleich • CoE-Parameterverzeichnis • DC/FreeRun-Modus • die verfügbaren Prozessdatensätze (PDO) Die dafür bisher nötigen Karteireiter "Process Data", "DC", "Startup" und "CoE-Online" werden zwar noch angezeigt, es wird aber empfohlen die automatisch generierten Einstellungen durch die Inbetriebnahmehilfe nicht zu verändern, wenn diese verwendet wird.
-
Seite 86: Standardeinstellung
Inbetriebnahme Der vom Anwender beabsichtigte, von TwinCAT beim Start automatisch herbeigeführte Ziel-State kann im System Manager eingestellt werden. Sobald TwinCAT in RUN versetzt wird, wird dann der TwinCAT EtherCAT Master die Zielzustände anfahren. Standardeinstellung Standardmäßig ist in den erweiterten Einstellungen des EtherCAT Masters gesetzt: •... -
Seite 87: Manuelle Führung
Inbetriebnahme Abb. 89: Default Zielzustand im Slave Manuelle Führung Aus bestimmten Gründen kann es angebracht sein, aus der Anwendung/Task/PLc die States kontrolliert zu fahren, z.B. • aus Diagnosegründen • kontrolliertes Wiederanfahren von Achsen • ein zeitlich verändertes Startverhalten ist gewünscht Dann ist es in der PLC-Anwendung sinnvoll, die PLC-Funktionsblöcke aus der standardmäßig vorhandenen TcEtherCAT.lib zu nutzen und z.B. - Seite 88 Inbetriebnahme Hinweis E-Bus-Strom EL/ES-Klemmen werden im Klemmenstrang auf der Hutschiene an einen Koppler gesetzt. Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, i.d.R. ist ein Koppler dabei bis zu 2 A belastbar. Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E- Bus-Versorgung benötigt, online und im Katalog verfügbar.
-
Seite 89: Control- Und Status-Byte
Inbetriebnahme Control- und Status-Byte Control-Byte Das Control-Byte der digitalen Eingangsklemmen hat zur Zeit noch keine Funktion. Status-Byte Das Status-Byte der digitalen Eingangsklemmen hat zur Zeit noch keine Funktion. EL10xx, EL11xx Version: 4.3... -
Seite 90: Anhang
The modules are intended for use with Beckhoff’s UL Listed EtherCAT System only. Examination For cULus examination, the Beckhoff I/O System has only been investigated for risk of fire and electrical shock (in accordance with UL508 and CSA C22.2 No. 142). -
Seite 91: Atex-Dokumentation
Die Klemmen der EL10xx und EL11xx Serie verfügen über keine Firmware. Firmware Update EL/ES/EM/EPxxxx In diesem Kapitel wird das Geräteupdate für Beckhoff EtherCAT Slaves der Serien EL/ES, EM, EK und EP beschrieben. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden. -
Seite 92: Gerätebeschreibung Esi-File/Xml
Hardware. Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder so- Hinweis gar zur endgültigen Außerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit dem Beckhoff Support ausgeführt werden. Anzeige der Slave-Kennung ESI Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibung festzustellen, ist im TwinCAT Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:... - Seite 93 Anhang Abb. 94: Rechtsklick auf das EtherCAT Gerät bewirkt im Config/FreeRun-Mode das Scannen des unterlagerten Feldes Wenn das gefundene Feld mit dem konfigurierten übereinstimmt, erscheint Abb. 95: Konfiguration identisch ansonsten erscheint ein Änderungsdialog, um die realen Angaben in die Konfiguration zu übernehmen. Abb. 96: Änderungsdialog In diesem Beispiel in Abb.
-
Seite 94: Änderung Der Slave-Kennung Esi
Anhang Änderung der Slave-Kennung ESI Die ESI/EEPROM-Kennung kann unter TwinCAT wie folgt aktualisiert werden: • Es muss eine einwandfreie EtherCAT-Kommunikation zum Slave hergestellt werden • Der State des Slave ist unerheblich • Rechtsklick auf den Slave in der Online-Anzeige führt zum Dialog EEPROM Update, Abb. „EEPROM Update“... -
Seite 95: Versionsbestimmung Mit Dem System-Manager
Anhang Versionsbestimmung der Firmware Versionsbestimmung nach Laseraufdruck Auf einem Beckhoff EtherCAT Slave ist eine Seriennummer aufgelasert. Der Aufbau der Seriennummer lautet: KK YY FF HH KK - Produktionswoche (Kalenderwoche) YY - Produktionsjahr FF - Firmware-Stand HH - Hardware-Stand Beispiel mit Ser. Nr.: 12 10 03 02:... -
Seite 96: Update Controller-Firmware *.Efw
Um die Controller-Firmware eines Slave zu aktualisieren, wechseln Sie zum Karteireiter Online, s. Abb. „Firmware Update“. Abb. 100: Firmware Update Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z.B. durch den Beckhoff Support vorliegen. • Slave in INIT schalten (A) •... - Seite 97 Anhang Versionsbestimmung mit dem System-Manager Der TwinCAT System-Manager zeigt die Version der FPGA-Firmware an. Klicken Sie hierzu auf die Ethernet-Karte Ihres EtherCAT-Stranges (im Beispiel Gerät 2) und wählen Sie den Karteireiter Online. Die Spalte Reg:0002 zeigt die Firmware-Version der einzelnen EtherCAT-Geräte in hexadezimaler und dezimaler Darstellung an.
-
Seite 98: Update Eines Ethercat-Geräts
Anhang Abb. 103: Dialog "Advanced settings" Update Für das Update der FPGA-Firmware • eines EtherCAT-Kopplers, muss auf auf diesem Koppler mindestens die FPGA-Firmware-Version 11 vorhanden sein. • einer E-Bus-Klemme, muss auf auf dieser Klemme mindestens die FPGA-Firmware-Version 10 vorhanden sein. Ältere Firmwarestände können nur vom Hersteller aktualisiert werden! Update eines EtherCAT-Geräts Wählen Sie im TwinCAT System-Manager die Klemme an, deren FPGA-Firmware Sie aktualisieren möchten (im Beispiel: Klemme 5: EL5001) und... - Seite 99 Anhang Abb. 104: Dialog "Weitere Eimstellungen" wählen Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf die Schaltfläche Schreibe FPGA, Abb. 105: Dialog "Schreibe FPGA" wählen EL10xx, EL11xx Version: 4.3...
-
Seite 100: Gleichzeitiges Update Mehrerer Ethercat-Geräte
Anhang Abb. 106: Datei auswählen Wählen Sie die Datei (*.rbf) mit der neuen FPGA-Firmware aus und übertragen Sie diese zum EtherCAT- Gerät. Beschädigung des Gerätes möglich! Das Herunterladen der Firmware auf ein EtherCAT-Gerät dürfen Sie auf keinen Fall unter- brechen! Wenn Sie diesen Vorgang abbrechen, dabei die Versorgungsspannung ausschal- Achtung ten oder die Ethernet-Verbindung unterbrechen, kann das EtherCAT-Gerät nur vom Her- steller wieder in Betrieb genommen werden! -
Seite 101: Support Und Service
Anhang Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Support Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:... - Seite 102 Abbildungsverzeichnis Abbildungsverzeichnis Abb. 1 EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeich- nung (seit 2014/01)........................Abb. 2 EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Chargennummer ....... Abb. 3 CU2016 Switch mit Chargennummer ..................Abb. 4 EL3202-0020 mit Chargennummern 26131006 und eindeutiger ID-Nummer 204418 ....Abb.
- Seite 103 Abbildungsverzeichnis Abb. 42 Gerätebezeichnung: Struktur....................... Abb. 43 Hinweisfenster OnlineDescription (TwinCAT 2)................Abb. 44 Hinweisfenster OnlineDescription (TwinCAT 3)................Abb. 45 Vom Systemmanager angelegt OnlineDescription.xml ............... Abb. 46 Kennzeichnung einer online erfassten ESI am Beispiel EL2521..........Abb. 47 Hinweisfenster fehlerhafte ESI-Datei (links: TwinCAT 2; rechts: TwinCAT 3)......Abb.
- Seite 104 Abbildungsverzeichnis Abb. 85 Grundlegende EtherCAT Slave Diagnose in der PLC ..............Abb. 86 EL3102, CoE-Verzeichnis......................Abb. 87 Beispiel Inbetriebnahmehilfe für eine EL3204 ................Abb. 88 Default Verhalten System Manager..................... Abb. 89 Default Zielzustand im Slave ....................... Abb. 90 PLC-Bausteine..........................Abb. 91 Unzulässige Überschreitung E-Bus Strom .................. Abb.