Beckhoff EJ7211-0010 Dokumentation
Servomotormodul für oct, 48 v dc, 4,5 a (ieff)

Verwandte Anleitungen für Beckhoff EJ7211-0010












Inhaltszusammenfassung für Beckhoff EJ7211-0010
- Seite 1 Dokumentation EJ7211-0010 Servomotormodul für OCT, 48 V DC, 4,5 A (Ieff) Version: Datum: 26.06.2020...
-
Seite 3: Inhaltsverzeichnis
Beckhoff Identification Code (BIC)................... 10 1.6.2 Zertifikate ......................... 12 2 Systemübersicht............................ 13 3 Produktübersicht ............................. 14 EJ7211-0010 - Einführung....................... 14 EJ7211-0010 - Technische Daten .................... 15 Technologie ............................. 16 EJ7211-0010 - Kontaktbelegung ..................... 19 EJ7211-0010 - LEDs ........................ 20 4 Installation von EJ-Modulen ........................ 21 Spannungsversorgung der EtherCAT-Steckmodule ............... 21 EJxxxx - Abmessungen ........................ 23... - Seite 4 Inhaltsverzeichnis 8.3.3 Update Controller-Firmware *.efw ................... 55 8.3.4 FPGA-Firmware *.rbf ....................... 56 8.3.5 Gleichzeitiges Update mehrerer EtherCAT-Geräte ............ 60 Wiederherstellen des Auslieferungszustandes................ 61 Support und Service ........................ 62 Version: 1.0 EJ7211-0010...
-
Seite 5: Vorwort
Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. -
Seite 6: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 7: Bestimmungsgemäße Verwendung
Eine Verwendung der EJ - Komponenten, die über die im Folgenden beschriebene bestimmungsgemäße Verwendung hinausgeht, ist nicht zulässig! Ausgabestände der Dokumentation Version Kommentar • 1. Veröffentlichung EJ7211-0010 Wegweiser durch die Dokumentation HINWEIS Weitere Bestandteile der Dokumentation Die in der folgenden Tabelle genannten Dokumentationen sind Bestandteil der Gesamtdo- kumentation. -
Seite 8: Kennzeichnung Von Ethercat-Steckmodulen
Vorwort Kennzeichnung von EtherCAT-Steckmodulen Bezeichnung Beckhoff EtherCAT-Steckmodule verfügen über eine 14-stellige technische Bezeichnung, die sich wie folgt zusammensetzt (z. B. EJ1008-0000-0017): • Bestellbezeichnung: ◦ Familienschlüssel: EJ ◦ Produktbezeichnung: Die erste Stelle der Produktbezeichnung dient der Zuordnung zu einer Produktgruppe (z. B. EJ2xxx = Digital - Ausgangsmodul) ◦... -
Seite 9: Abb. 2 Bestellbezeichnung (A), Revisionsnummer (B) Und Seriennummer (C) Am Beispiel Ej1008
Dokumentation angegeben. Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird auf der Seite der EtherCAT-Steckmodule aufgebracht, siehe folgende Abbildung. -
Seite 10: Beckhoff Identification Code (Bic)
Vorwort 1.6.1 Beckhoff Identification Code (BIC) Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff Produkten zur eindeutigen Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016. - Seite 11 Beispiel einer zusammengesetzten Information aus den Positionen 1 - 4 und 6. Die Datenidentifikatoren sind zur besseren Darstellung jeweils rot markiert: Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr. 2). Die BTN ist eine eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen Seriennummern- Systeme bei Beckhoff ersetzen wird (z.
-
Seite 12: Zertifikate
• Der Aufdruck cRUus kennzeichnet Geräte, welche die Anforderungen für Produktsicherheit nach US- Amerikanischen bzw. kanadischen Vorschriften erfüllen. • Das Warnsymbol gilt als Aufforderung die zugehörige Dokumentation zu lesen. Die Dokumentationen zu den EtherCAT-Steckmodulen werden auf der Beckhoff-Homepage zum Download zur Verfügung gestellt. Abb. 4: Kennzeichen für CE und UL am Beispiel EJ1008 Version: 1.0... -
Seite 13: Systemübersicht
Durch das Anstecken von vorkonfektionierten Kabelbäumen entfällt die aufwändige Einzeladerverdrahtung. Die Stückkosten und das Risiko der Fehlverdrahtung werden durch kodierte Bauteile reduziert. Die Entwicklung des Signal-Distribution-Boards kann als Engineering-Dienstleistung durch Beckhoff erfolgen. Es besteht ebenfalls die Möglichkeit, dass der Kunde auf Basis des Design-Guides das Signal- Distribution-Board selbst entwickelt. -
Seite 14: Produktübersicht
TwinCAT 2.11 R3 zu betreiben! Obligatorische Hardware Das Modul muss mit einem echtzeitfähigen Rechner und Distributed Clocks betrieben werden! Freigegebene Motoren Ein einwandfreier Betrieb kann nur mit den von Beckhoff freigegebenen Motoren gewährleistet wer- den. Version: 1.0 EJ7211-0010... -
Seite 15: Ej7211-0010 - Technische Daten
Produktübersicht EJ7211-0010 - Technische Daten Technische Daten EJ7211-0010 Anzahl Kanäle 1 Servomotor, absolutes Feedback, Motorbremse, 2 digitale Eingänge Anschlusstechnik Motordirektanschluss Lastart Permanenterregte Synchronmotoren Zwischenkreisversorgungsspannung 8 .. 48 V Ausgangsstrom I 4,5 A (effektiv) / 6,3 A (Spitzenwert) Spitzenstrom I 9 A (effektiv) / 12.6 A (Spitzenwert) für 1 Sekunde Frequenzbereich 0 Hz .. -
Seite 16: Technologie
Das EtherCAT-Servomotormodul bietet dem Anwender die Möglichkeit kompakte und kostengünstige Anlagen zu konstruieren, ohne auf die Vorteile eines Servomotors verzichten zu müssen. Das Beckhoff Servomodul Das Servomotormodul EJ72x1-xxxx ist ein vollwertiger Servoverstärker für den direkten Anschluss von Servomotoren im unteren Leistungsbereich. Weitere Module oder Verkabelung, um eine Verbindung zum Steuerungssystem herzustellen entfallen dadurch komplett. - Seite 17 Schrittmotoren, AC- und DC-Motoren verfügbar sind. Mit dem Servomodul EJ72x1-xxxx wird das Angebot an Servoverstärkern noch feiner skalierbar: Vom Kleinst-Servoverstärker bis 170 W, in der EtherCAT- Klemme, bis zum AX5000-Servoverstärker mit 118 kW, bietet Beckhoff ein breites Programm, inklusive der Servomotoren.
-
Seite 18: Abb. 8 Limitierung Auf Den Nennstroms Des Motors
Produktübersicht Die exakte Berechnung des Durchtritts von 100% Auslastung erfordert die Kenntnis der aktuellen Auslastung. Abb. 8: Limitierung auf den Nennstroms des Motors Version: 1.0 EJ7211-0010... -
Seite 19: Ej7211-0010 - Kontaktbelegung
Produktübersicht EJ7211-0010 - Kontaktbelegung Abb. 9: EJ7211-0010 - Kontaktbelegung Der Leiterkarten Footprint steht auf der Beckhoff-Homepage zum Download bereit. HINWEIS Schädigung von Geräten möglich! • Die mit „NC“ benannten Pins dürfen nicht kontaktiert werden. • Vor der Montage und Inbetriebnahme lesen Sie auch die Kapitel Installation von EJ-Mo- dulen [} 21] und Inbetriebnahme [} 38]! -
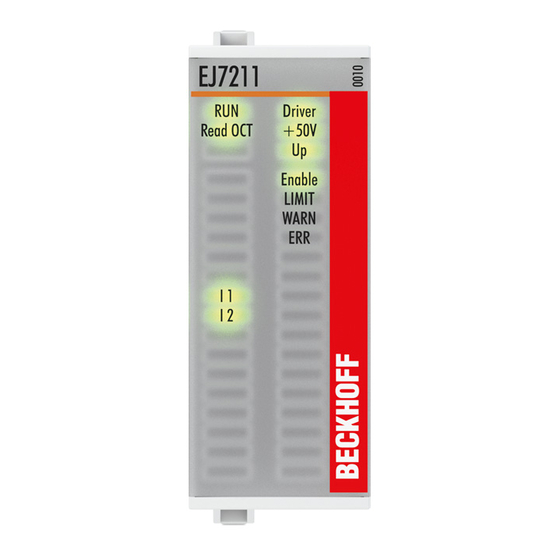
Seite 20: Ej7211-0010 - Leds
Produktübersicht EJ7211-0010 - LEDs Abb. 10: EJ7211-0010 - LEDs LEDs (linke Seite) Farbe Anzeige Zustand Beschreibung grün Init Zustand der EtherCAT State Machine: INIT = Initialisierung des Steckmoduls blinkend Pre-Opera- Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kommunikation tional... -
Seite 21: Installation Von Ej-Modulen
Bei dem Koppler EJ1101-0022 sind die RJ45 Verbinder und die optionalen ID-Switche extern ausgeführt und können auf dem Signal-Distribution-Board beliebig platziert werden. Somit wird die einfache Durchführung durch ein Gehäuse ermöglicht. Die Netzteil-Steckmodule EJ940x stellen eine optionale Reset-Funktion zur Verfügung (s. Kapitel Kontaktbelegung der Dokumentationen zu EJ9400 und EJ9404) EJ7211-0010 Version: 1.0... -
Seite 22: Abb. 12 Leiterkarte Mit Embedded Pc, Ek1110-0043 Und Ejxxxx, Rückansicht Ek1110-0043
Die EtherCAT-EJ-Koppler EK1110-004x leiten über den rückwärtigen Stecker • die E-Bus Signale, • die E-Bus Spannung U (3,3 V) und EBUS • die Peripheriespannung U (24 V an das Signal-Distribution-Board weiter. Abb. 12: Leiterkarte mit Embedded PC, EK1110-0043 und EJxxxx, Rückansicht EK1110-0043 Version: 1.0 EJ7211-0010... -
Seite 23: Ejxxxx - Abmessungen
EJ7342 (ej_24_2x16pin_code18) 1-fach Modul (lang) 12 mm x 152 mm x 55 mm EJ1957 (ej_12_2x16pin_extended_code4747) Abb. 13: EJxxxx - Abmessungen Zeichnungen für die EtherCAT-Steckmodule finden Sie im Downloadfinder. Die Benennung der Zeichnungen setzt sich wie in untenstehender Zeichnung beschrieben zusammen. Abb. 14: Technischen Zeichnungen im Downloadfinder EJ7211-0010 Version: 1.0... -
Seite 24: Einbaulagen Und Mindestabstände
Bei Einhaltung der empfohlenen Mindestabstände zur Belüftung (s. Kapitel Einbaulage [} 25]), ist ein ausreichend großer Griffbereich gewährleistet. Das Signal-Distribution-Board muss eine Stärke von 1,6 mm und einen Abstand von mindestens 4 mm zur Montagefläche haben, um die Verrastung der Module auf dem Board sicherzustellen. Version: 1.0 EJ7211-0010... -
Seite 25: Einbaulagen
Die Einhaltung der Abstände nach Abb. Empfohlene Abstände bei Standard Einbaulage wird empfohlen. Die empfohlenen Mindestabstände sind nicht als Sperrbereiche für andere Bauteile zu sehen. Die Einhaltung der in den Technischen Daten beschriebenen Umgebungsbedingungen ist durch den Kunden zu prüfen und gegebenenfalls durch zusätzliche Maßnahmen zur Kühlung sicherzustellen. EJ7211-0010 Version: 1.0... -
Seite 26: Abb. 17 Weitere Einbaulagen
Weitere Einbaulagen Alle anderen Einbaulagen zeichnen sich durch davon abweichende räumliche Lage des Signal-Distribution- Boards aus, s. Abb. Weitere Einbaulagen. Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zur Umgebung. Abb. 17: Weitere Einbaulagen Version: 1.0 EJ7211-0010... -
Seite 27: Hinweise Zur Strommessung Über Hall-Sensor
- Strom 10 A: 12 mm - Strom 20 A: 25 mm - Strom 40 A: 50 mm Wenn es in der Gerätedokumentation nicht anders spezifiziert ist, ist das Aneinanderreihen von Mo- dulen (z.B. Reihenklemmen im 12 mm Rastermaß) gleichen Typs (z.B. EL2212-0000) darüber hin- aus zulässig. EJ7211-0010 Version: 1.0... -
Seite 28: Kodierungen
Der Farbcode gibt die Signalart an. Die folgende Tabelle gibt einen Überblick über die Signalart mit der zugehörigen Farbkodierung. Signalart Module Farbe Koppler EJ11xx Ohne Farbkodierung Digital Eingang EJ1xxx Gelb Digital Ausgang EJ2xxx Analog Eingang EJ3xxx Grün Analog Ausgang EJ4xxx Blau Motion EJ7xxx orange System EJ9xxx grau Version: 1.0 EJ7211-0010... -
Seite 29: Mechanische Positionskodierung
Eingangsmodule die Kodierstifte an den Positionen eins und drei. Es besteht kein Steckschutz zwischen Modulen der gleichen Signalart. Deshalb ist bei der Montage der Einsatz des korrekten Moduls anhand der Gerätebezeichnung zu prüfen. Abb. 21: Pin-Kodierung am Beispiel digitaler Eingangsmodule EJ7211-0010 Version: 1.0... -
Seite 30: Montage Auf Dem Signal-Distribution-Board
Aufwärts- und Abwärtsbewegung auf das Board bis das Modul sicher verrastet ist. Nur wenn das Modul fest eingerastet ist, kann der benötigte Kontaktdruck aufgebaut und die maxima- le Stromtragfähigkeit gewährleistet werden. 5. Belegen Sie Lücken im Modulstrang mit Platzhaltermodulen (EJ9001). Version: 1.0 EJ7211-0010... - Seite 31 Installation von EJ-Modulen HINWEIS • Achten Sie bei der Montage auf sichere Verrastung der Module mit dem Board! Die Folgen mangelnden Kontaktdrucks sind: ð Qualitätsverluste des übertragenen Signals, ð erhöhte Verlustleistung der Kontakte, ð Beeinträchtigung der Lebensdauer. EJ7211-0010 Version: 1.0...
-
Seite 32: Erweiterungsmöglichkeiten
(Extended-Version). Abb. 23: Beispiel Austausch Platzhaltermodule u. Belegung Reserveslots E-Bus - Versorgung Nach dem Austausch der Platzhaltermodule gegen andere Module verändert sich die Stromaufnah- me aus dem E-Bus. Stellen Sie sicher, dass eine ausreichende Versorgung weiterhin gewährleistet wird. Version: 1.0 EJ7211-0010... -
Seite 33: Verknüpfung Mit Ethercat-Klemmen Und Ethercat-Box-Modulen Über Eine Ethernet/Ethercat-Verbindung
Installation von EJ-Modulen 4.7.2 Verknüpfung mit EtherCAT-Klemmen und EtherCAT-Box- Modulen über eine Ethernet/EtherCAT-Verbindung Beispiel Erweiterung über eine Ethernet/EtherCAT-Verbindung EJ7211-0010 Version: 1.0... -
Seite 34: Ipc Integration
Durch die direkte Ankopplung des Embedded-PCs und der EL-Klemmen mit den EJ-Modulen auf der Leiterkarte können eine EtherCAT-Verlängerung (EK1110) und ein EtherCAT-Koppler (EJ1100) entfallen. Der Embedded-PC ist mit EtherCAT-Klemmen erweiterbar, die z. B. noch nicht im EJ-System zur Verfügung stehen. Abb. 24: Beispiel Leiterkarte mit Embedded PC, EK1110-0043 und EJxxxx, Rückansicht EK1110-0043 Version: 1.0 EJ7211-0010... -
Seite 35: Platzierung Auf Dem Signal-Distribution-Board
Dokumentationen zu den einzelnen Komponenten zu entnehmen. Die folgende Abbildung zeigt beispielhaft die Anbindung des IPC C6015 an ein EJ-System. Die abgebildeten Komponenten dienen ausschließlich der funktionell-schematischen Darstellung. Abb. 25: Beispiel für die Anbindung des IPC C6015 an ein EJ-System EJ7211-0010 Version: 1.0... -
Seite 36: Demontage Vom Signal-Distribution-Board
1. Stellen Sie sicher, dass das Signal-Distribution-Board vor der Demontage der Module fest mit der Montagefläche verbunden ist. Die Demontage vom unbefestigten Signal-Distribution-Board kann zu Beschädigungen des Boards führen. 2. Drücken Sie die obere und die untere Montagelasche gleichzeitig und ziehen das Modul unter leichter Aufwärts- und Abwärtsbewegung vom Board ab. Version: 1.0 EJ7211-0010... -
Seite 37: Ethercat-Grundlagen
EtherCAT-Grundlagen EtherCAT-Grundlagen Grundlagen zum Feldbus EtherCAT entnehmen Sie bitte der EtherCAT System-Dokumentation. EJ7211-0010 Version: 1.0... -
Seite 38: Inbetriebnahme
Schädigung von Geräten oder Datenverlust Die Beschreibungen und Hinweise zur Inbetriebnahme der EtherCAT-Klemmen EL72x1-001x sind übertragbar auf die EtherCAT-Steckmodule EJ72x1-001x. Lesen Sie vor der Inbetriebnahme die ausführliche Beschreibung der Prozessdaten, Be- triebsmodi und Parametrierung der EL72x1-001x Dokumentation. Version: 1.0 EJ7211-0010... -
Seite 39: Diagnose - Grundlagen Zu Diag Messages
In der zum EtherCAT-Gerät gehörigen ESI/XML-Datei werden die DiagMessages in Textform erklärt: Anhand der in der DiagMessage enthaltenen Text-ID kann die entsprechende Klartextmeldung in den Sprachen gefunden werden, die in der ESI/XML enthalten sind. Üblicherweise sind dies bei Beckhoff- Produkten deutsch und englisch. -
Seite 40: Abb. 28 Implementierung Diagmessage-System Im Twincat System Manager
Eintrag standardmäßig in der StartUp-Liste: Soll die Funktion deaktiviert werden weil z.B. viele Meldungen kommen oder der EventLogger nicht genutzt wird, kann der StartUp-Eintrag gelöscht oder auf 0 gesetzt werden. Nachrichten in die PLC einlesen - In Vorbereitung - Version: 1.0 EJ7211-0010... - Seite 41 über den EtherCAT Master oder durch Einsicht in das Register x901 eines DC-Slaves ermittelt werden. Aufbau der Text-ID Der Aufbau der MessageID unterliegt keiner Standardisierung und kann herstellerspezifisch definiert werden. Bei Beckhoff EtherCAT-Geräten (EL, EP) lautet er nach xyzz üblichwerweise: 0: Systeminfo 0: System...
- Seite 42 No channel range error anymore Es liegt kein Messbereichsfehler mehr vor 0x170C Information Calibration data saved Abgleichdaten wurden gespeichert 0x170D Information Calibration data will be applied Abgleichdaten werden erst nach dem Senden des and saved after sending the com- Kommandos „0x5AFE“ übernommen und gespeichert mand “0x5AFE” Version: 1.0 EJ7211-0010...
- Seite 43 Doppelte IP-Adresse gefunden ted (%d.%d.%d.%d) 0x2007 Information System %s: UDP handler initialized UDP-Handler initialisiert 0x2008 Information System %s: TCP handler initialized TCP-Handler initialisiert 0x2009 Information System %s: No more free TCP sockets Keine freien TCP Sockets verfügbar available EJ7211-0010 Version: 1.0...
- Seite 44 Die Warnung wird ausgegeben, wenn die Sollgeschwindigkeit größer ist, als eines der parame- trierten Begrenzungen. 0x4416 Warnung Drive Step lost detected at position: 0x Schrittverlust erkannt %X%X 0x4417 Warnung Drive Motor-Overtemperature Die Innentemperatur des Motors übersteigt die para- metrierte Warnschwelle. Version: 1.0 EJ7211-0010...
- Seite 45 Processor usage at %d %% Prozessorauslastung bei %d %% 0x470A Warnung EtherCAT Frame missed (change EtherCAT Frame verpasst (Einstellungen, DC Operati- Settings or DC Operation Mode on Mode oder Sync0 Shift Time ändern) or Sync0 Shift Time) EJ7211-0010 Version: 1.0...
- Seite 46 Kommunikation Tickstamp Process failed 0x828B Fehler Kommunikation PCR Process failed: %X 0x828C Fehler Kommunikation Quote Process failed: %X 0x82FF Fehler Kommunikation Bootmode not activated Bootmode nicht aktiviert 0x8300 Fehler Encoder Set position error: 0x%X, %d Fehler beim Setzen der Position Version: 1.0 EJ7211-0010...
- Seite 47 Versorgungsspannung im falschen Bereich 0x8601 Fehler Allgemein IO Supply voltage to low Versorgungsspannung zu klein 0x8602 Fehler Allgemein IO Supply voltage to high Versorgungsspannung zu groß 0x8603 Fehler Allgemein IO Over current of supply voltage Überstrom der Versorgungsspannung EJ7211-0010 Version: 1.0...
- Seite 48 Überlastzeit wurde manipuliert 0x8709 Fehler Saturationtime was manipulated Sättigungszeit wurde manipuliert 0x870A Fehler Channel range error Messbereichsfehler des Kanals 0x870B Fehler no ADC clock Kein ADC Takt vorhanden 0xFFFF Information Debug: 0x%X, 0x%X, 0x%X Debug: 0x%X, 0x%X, 0x%X Version: 1.0 EJ7211-0010...
-
Seite 49: Anhang
Stand. Überprüfen Sie auf der Beckhoff Website, ob eine aktuellere Dokumentation vorliegt. Firmware Update EL/ES/ELM/EM/EPxxxx Dieses Kapitel beschreibt das Geräte-Update für Beckhoff EtherCAT Slaves der Serien EL/ES, ELM, EM, EK und EP. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden. -
Seite 50: Gerätebeschreibung Esi-File/Xml
Beim Einschalten wird diese Beschreibung geladen und u. a. die EtherCAT Kommunikation entsprechend eingerichtet. Die Gerätebeschreibung kann von der Beckhoff Website (http:// www.beckhoff.de) im Downloadbereich heruntergeladen werden. Dort sind alle ESI-Dateien als Zip- Datei zugänglich. Kundenseitig zugänglich sind diese Daten nur über den Feldbus EtherCAT und seine Kommunikationsmechanismen. -
Seite 51: Update Von Xml/Esi-Beschreibung
Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder sogar zur endgültigen Außerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit dem Beckhoff Support ausgeführt werden. Anzeige der Slave-Kennung ESI Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibung festzustellen, ist im TwinCAT-Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:... -
Seite 52: Abb. 31 Konfiguration Identisch
Die ESI/EEPROM-Kennung kann unter TwinCAT wie folgt aktualisiert werden: • Es muss eine einwandfreie EtherCAT-Kommunikation zum Slave hergestellt werden • Der State des Slave ist unerheblich • Rechtsklick auf den Slave in der Online-Anzeige führt zum Dialog EEPROM Update, Abb. EEPROM Update Version: 1.0 EJ7211-0010... -
Seite 53: Erläuterungen Zur Firmware
PowerOn gelesen. Deshalb ist ein kurzes Abschalten des EtherCAT Slave nö- tig, damit die Änderung wirksam wird. 8.3.2 Erläuterungen zur Firmware Versionsbestimmung der Firmware Versionsbestimmung nach Laseraufdruck Auf einem Beckhoff EtherCAT Slave ist eine Seriennummer aufgelasert. Der Aufbau der Seriennummer lautet: KK YY FF HH EJ7211-0010 Version: 1.0... -
Seite 54: Coe-Online Und Offline-Coe
• offline: in der EtherCAT Slave Information ESI/XML kann der Default-Inhalt des CoE enthalten sein. Dieses CoE-Verzeichnis kann nur angezeigt werden, wenn es in der ESI (z. B. „Beckhoff EL5xxx.xml“) enthalten ist. Die Umschaltung zwischen beiden Ansichten kann über den Button Advanced vorgenommen wer- den. -
Seite 55: Update Controller-Firmware *.Efw
Firmware Update. Abb. 36: Firmware Update Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen. Gültig für TwinCAT 2 und 3 als EtherCAT Master. • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1ms schalten (default sind im ConfigMode 4 ms). -
Seite 56: Fpga-Firmware *.Rbf
Der TwinCAT System-Manager zeigt die Version der FPGA-Firmware an. Klicken Sie hierzu auf die Ethernet-Karte Ihres EtherCAT-Stranges (im Beispiel Gerät 2) und wählen Sie den Karteireiter Online. Die Spalte Reg:0002 zeigt die Firmware-Version der einzelnen EtherCAT-Geräte in hexadezimaler und dezimaler Darstellung an. Version: 1.0 EJ7211-0010... -
Seite 57: Abb. 37 Versionsbestimmung Fpga-Firmware
Abb. 38: Kontextmenu Eigenschaften (Properties) In dem folgenden Dialog Advanced Settings können Sie festlegen, welche Spalten angezeigt werden sollen. Markieren Sie dort unter Diagnose/Online Anzeige das Kontrollkästchen vor '0002 ETxxxx Build' um die Anzeige der FPGA-Firmware-Version zu aktivieren. EJ7211-0010 Version: 1.0... -
Seite 58: Abb. 39 Dialog Advanced Settings
Ältere Firmware-Stände können nur vom Hersteller aktualisiert werden! Update eines EtherCAT-Geräts Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen: • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1 ms schalten (default sind im ConfigMode 4 ms). - Seite 59 • Wählen Sie im TwinCAT System-Manager die Klemme an, deren FPGA-Firmware Sie aktualisieren möchten (im Beispiel: Klemme 5: EL5001) und klicken Sie auf dem Karteireiter EtherCAT auf die Schaltfläche Weitere Einstellungen: • Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf die Schaltfläche Schreibe FPGA: EJ7211-0010 Version: 1.0...
-
Seite 60: Gleichzeitiges Update Mehrerer Ethercat-Geräte
Die Firmware von mehreren Geräten kann gleichzeitig aktualisiert werden, ebenso wie die ESI- Beschreibung. Voraussetzung hierfür ist, dass für diese Geräte die gleiche Firmware-Datei/ESI gilt. Abb. 40: Mehrfache Selektion und FW-Update Wählen Sie dazu die betreffenden Slaves aus und führen Sie das Firmware-Update im BOOTSTRAP Modus wie o. a. aus. Version: 1.0 EJ7211-0010... -
Seite 61: Wiederherstellen Des Auslieferungszustandes
Abb. 42: Eingabe des Restore-Wertes im Set Value Dialog Alternativer Restore-Wert Bei einigen Klemmen älterer Bauart lassen sich die Backup-Objekte mit einem alternativen Restore- Wert umstellen: Dezimalwert: 1819238756, Hexadezimalwert: 0x6C6F6164. Eine falsche Eingabe des Restore-Wertes zeigt keine Wirkung! EJ7211-0010 Version: 1.0... -
Seite 62: Support Und Service
Anhang Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Support Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:... - Seite 63 Limitierung auf den Nennstroms des Motors ................Abb. 9 EJ7211-0010 - Kontaktbelegung ....................Abb. 10 EJ7211-0010 - LEDs ........................Abb. 11 E-Bus-Spannungsversorgung mit EJ1100 oder EJ1101-0022 + EJ940x ........Abb. 12 Leiterkarte mit Embedded PC, EK1110-0043 und EJxxxx, Rückansicht EK1110-0043....