Lenze L-force EMF2192IB Kommunikationshandbuch

Verwandte Anleitungen für Lenze L-force EMF2192IB













Inhaltszusammenfassung für Lenze L-force EMF2192IB
- Seite 1 EDSMF2192IB L−force Communication .Stg Kommunikationshandbuch EtherCAT® EMF2192IB Kommunikationsmodul...
-
Seite 2: Inhaltsverzeichnis
Inhalt Über diese Dokumentation ..........Dokumenthistorie . - Seite 3 ......6.3.4 Verhalten der Lenze EtherCAT−Teilnehmer beim Starten ... .
-
Seite 4: Über Diese Dokumentation
Sicherheitshinweise, die unbedingt beachtet werden müssen. ƒ Die wesentlichen technischen Daten des Kommunikationsmoduls ƒ Angaben über Versionsstände der zu verwendenden Lenze−Grundgeräte ƒ Hinweise zur Fehlersuche und Störungsbeseitigung ƒ Die theoretischen Zusammenhänge sind nur soweit erklärt, wie sie zum Verständnis der Funktion des Kommunikationsmoduls notwendig sind. - Seite 5 Zielgruppe Diese Dokumentation richtet sich an Personen, die die Vernetzung und Fernwartung einer Maschine projektieren, installieren, in Betrieb nehmen und warten. Tipp! Informationen und Hilfsmittel rund um die Lenze−Produkte finden Sie im Download−Bereich unter www.lenze.com Informationen zur Gültigkeit Die Informationen in dieser Dokumentation sind gültig für folgende Geräte:...
-
Seite 6: Dokumenthistorie
Umgang mit unserem Produkt zu unterstützen. Vielleicht ist uns das nicht überall gelungen. Wenn Sie das feststellen sollten, senden Sie uns Ihre Anregungen und Ihre Kritik in einer kurzen E−Mail an: feedback−docu@Lenze.de Vielen Dank für Ihre Unterstützung. Ihr Lenze−Dokumentationsteam EDSMF2192IB DE 4.0... -
Seite 7: Verwendete Konventionen
Über diese Dokumentation Verwendete Konventionen Verwendete Konventionen Diese Dokumentation verwendet folgende Konventionen zur Unterscheidung verschiede- ner Arten von Information: Informationsart Auszeichnung Beispiele/Hinweise Zahlenschreibweise Dezimaltrennzeichen Punkt Es wird generell der Dezimalpunkt verwen- det. Zum Beispiel: 1234.56 Dezimal normale Zum Beispiel: 1234 Schreibweise Hexadezimal 0x[0 ... -
Seite 8: Verwendete Begriffe
EtherCAT® ist ein echtzeitfähiges Ethernet−System mit höchster Performance. EtherCAT® ist eine eingetragene Marke und patentierte Technologie, lizenziert durch die Beckhoff Automation GmbH, Deutschland. Grundgerät Lenze Antriebsregler mit denen das Kommunikationsmodul eingesetzt werden kann. ^ 12 Antriebsregler »Global Drive Control« / PC−Software von Lenze, die Sie beim "Engineering"... -
Seite 9: Verwendete Hinweise
Über diese Dokumentation Verwendete Hinweise Verwendete Hinweise Um auf Gefahren und wichtige Informationen hinzuweisen, werden in dieser Dokumenta- tion folgende Piktogramme und Signalwörter verwendet: Sicherheitshinweise Aufbau der Sicherheitshinweise: Gefahr! (kennzeichnet die Art und die Schwere der Gefahr) Hinweistext (beschreibt die Gefahr und gibt Hinweise, wie sie vermieden werden kann) Piktogramm und Signalwort Bedeutung Gefahr von Personenschäden durch gefährliche elektrische... -
Seite 10: Sicherheitshinweise
Vorschläge, deren Übertragbarkeit auf die jeweilige Anwen- dung überprüft werden muss. Für die Eignung der angegebenen Verfahren und Schal- tungsvorschläge übernimmt der Hersteller keine Gewähr. Alle Arbeiten mit und an Lenze−Antriebs− und Automatisierungskomponenten darf ƒ nur qualifiziertes Fachpersonal ausführen. -
Seite 11: Geräte− Und Anwendungsspezifische Sicherheitshinweise
Sicherheitshinweise Geräte− und anwendungsspezifische Sicherheitshinweise Geräte− und anwendungsspezifische Sicherheitshinweise Während des Betriebs muss das Kommunikationsmodul fest mit dem Grundgerät ƒ verbunden sein. Verwenden Sie bei externer Spannungsversorgung in jedem Schaltschrank immer ƒ ein separates und nach EN 61800−5−1 sicher getrenntes Netzteil (SELV/PELV). Verwenden Sie ausschließlich Kabel, die den aufgeführten Spezifikationen (¶... -
Seite 12: Produktbeschreibung
Produktbeschreibung Bestimmungsgemäße Verwendung Produktbeschreibung Bestimmungsgemäße Verwendung Das Kommunikationsmodul ... ist ein Betriebsmittel zum Einsatz in industriellen Starkstromanlagen. ƒ nur in EtherCAT−Netzwerken einsetzen. ƒ ist einsetzbar in Verbindung mit folgenden Grundgeräten ƒ (Typenschildbezeichnungen): Gerätetyp Ausführung Version Variante Erläuterung ³ Vx ³ 1x 82EVxxxxxBxxxXX 8200 vector ³... -
Seite 13: Identifikation
Produktbeschreibung Identifikation Identifikation Type Id.-No. Prod.-No. E82AF000P0B201XX 2192ECAT013 W Typenschlüssel 33.2192IB Gerätereihe Hardwarestand Softwarestand EDSMF2192IB DE 4.0... -
Seite 14: Produkteigenschaften
Produktbeschreibung Produkteigenschaften Produkteigenschaften Anschaltbaugruppe für das Kommunikationssystem EtherCAT an die AIF−Steckplätze ƒ der Lenze Gerätereihen 8200 vector, 9300 und ECS (¶ 12) Unterstützung der Funktionalität EtherCAT−Slave ƒ Externe 24V−Versorgung zur Aufrechterhaltung des EtherCAT−Netzwerkes bei ƒ Ausfall des Grundgerätes Unterstützung der Funktionalität "Distributed clocks" (DC) zur Synchronisation über ƒ... -
Seite 15: Anschlüsse Und Schnittstellen
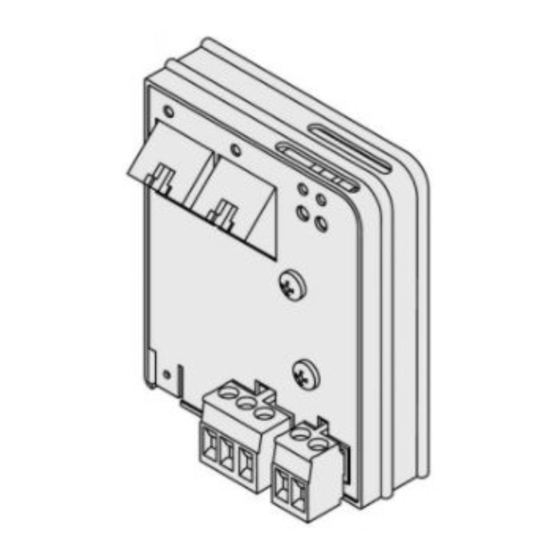
Produktbeschreibung Anschlüsse und Schnittstellen Anschlüsse und Schnittstellen 2192ECAT001B Abb. 3−1 Kommunikationsmodul EMF2192IB (EtherCAT) Legende zur Abbildung Pos. Beschreibung LED−Statusanzeigen 0 ... 3 ^ 53 Anschluss zur externen Spannungsversorgung (24 V) des Kommunikationsmoduls Steckerleiste mit Schraubanschluss, 2−polig ^ 27 Anschluss zur EtherCAT−Synchronisation Steckerleiste mit Schraubanschluss, 3−polig ^ 29 EtherCAT−Ausgang (OUT) -
Seite 16: Technische Daten
(TR ZU 004/2011) TR ZU: Technische Regulie- rung der Zollunion Dokumentationen zu Lenze Gerätereihen 8200 vector, 9300 und ECS Hier finden Sie die Umgebungsbedingungen und Daten zur Elektromagnetischen Verträglichkeit (EMV), die auch für das Kommunikationsmodul gelten. EDSMF2192IB DE 4.0... -
Seite 17: Technische Daten 4 Schutzisolierung
Technische Daten Schutzisolierung Schutzisolierung Gefahr! Gefährliche elektrische Spannung Bei Einsatz von Lenze−Antriebsreglern an einem außenleitergeerdeten Netz mit einer Netz−Nennspannung ³ 400 V ist die Berührsicherheit ohne externe Maßnahmen nicht sichergestellt. Mögliche Folgen: Tod oder schwere Verletzungen ƒ Schutzmaßnahmen: Ist Berührsicherheit für die Steuerklemmen des Antriebsreglers und für die ƒ... -
Seite 18: Kommunikationszeit
Technische Daten Kommunikationszeit Kommunikationszeit Bearbeitungszeiten im Antriebsregler Es existieren keine Abhängigkeiten zwischen Parameterdaten und Prozessdaten. Bearbeitungszeiten Parameterdaten Prozessdaten Bearbeitungszeit innerhalb Bei reglerinternen Parametern ca. Zeit bei 8200 vector: ca. 3 ms + 2 ms des Antriebsreglers 30 ms + 20 ms Toleranz Toleranz Bei einigen Codestellen kann die Be- Zeit bei Geräten der Reihe 9300: ca. -
Seite 19: Abmessungen
Technische Daten Abmessungen Abmessungen 2192ECAT001B alle Maße in mm EDSMF2192IB DE 4.0... -
Seite 20: Installation
Installation Installation Gefahr! Unsachgemäßer Umgang mit dem Kommunikationsmodul und dem Grundgerät kann schwere Personenschäden und Sachschäden verursachen. Beachten Sie die in der Dokumentation zum Grundgerät enthaltenen Sicherheitshinweise und Restgefahren. Stop! Das Gerät enthält Bauelemente, die durch elektrostatische Entladungen zerstört werden können! Vor Arbeiten am Gerät muss sich das Personal durch geeignete Maßnahmen von elektrostatischen Aufladungen befreien. -
Seite 21: Mechanische Installation
Installation Mechanische Installation Mechanische Installation 2102LEC014 Abb. 5−1 Kommunikationsmodul aufstecken Stecken Sie das Kommunikationsmodul auf das Grundgerät (hier: 8200 vector). ƒ Schrauben Sie das Kommunikationsmodul mit der Befestigungsschraube auf dem ƒ Grundgerät fest, um eine gute PE−Verbindung sicher zu stellen. Hinweis! Zur internen Versorgung des Kommunikationsmoduls durch den Frequenzumrichter 8200 vector muss der Jumper in der Schnittstellenöffnung... -
Seite 22: Elektrische Installation
Installation Elektrische Installation EMV−gerechte Verdrahtung (CE−typisches Antriebssystem) Elektrische Installation 5.2.1 EMV−gerechte Verdrahtung (CE−typisches Antriebssystem) Für eine EMV−gerechte Verdrahtung beachten Sie folgende Punkte: Hinweis! Steuer−/Datenleitungen getrennt von Motorleitungen verlegen. ƒ Legen Sie die Schirme der Steuer−/Datenleitungen bei digitalen Signalen ƒ beidseitig auf. Zur Vermeidung von Potenzialdifferenzen zwischen den ƒ... -
Seite 23: Netzwerk−Topologie
Installation Elektrische Installation Netzwerk−Topologie 5.2.2 Netzwerk−Topologie Ein EtherCAT−Telegramm wird auf einem Leitungspaar in Richtung vom Master zu den Sla- ves versendet. Das Telegramm wird dabei von Slave zu Slave weitergeleitet, bis es alle Ge- räte durchlaufen hat. Schließlich sendet der letzte Slave das Telegramm auf einem zweiten Leitungspaar zurück zum Master. -
Seite 24: Ethercat−Anschluss
Installation Elektrische Installation EtherCAT−Anschluss 5.2.3 EtherCAT−Anschluss Zum Anschluss des Kommunikationsmoduls an den Feldbus eignet sich ein handelsübli- ches Standard−Ethernet−Patchkabel (siehe "Spezifikation des Ethernet−Kabels" (¶ 25)). Hinweis! Um Beschädigungen der RJ45−Buchse zu vermeiden, den Stecker des Ethernet−Kabels gerade (im rechten Winkel) in die Buchse stecken bzw. aus der Buchse ziehen. -
Seite 25: Spezifikation Des Ethernet−Kabels
Installation Elektrische Installation Spezifikation des Ethernet−Kabels 5.2.4 Spezifikation des Ethernet−Kabels Hinweis! Verwenden Sie ausschließlich Kabel, die den aufgeführten Spezifikationen entsprechen. Spezifikation des Ethernet−Kabels Ethernet−Standard Standard Ethernet (nach IEEE 802.3), 100Base−TX (Fast Ethernet) Kabeltyp S/FTP (Screened Foiled Twisted Pair), ISO/IEC 11801 oder EN 50173, CAT 5e Dämpfung 23.2 dB (bei 100 MHz und je 100 m) - Seite 26 Installation Elektrische Installation Spezifikation des Ethernet−Kabels Farbcodierung des Ethernet−Kabels Hinweis! Die Verdrahtung und der Farbcode sind standardisiert in EIA/TIA 568A/568B. Der Einsatz 4−poliger Ethernet−Kabel nach Industrienorm ist zulässig. Der Kabeltyp verbindet nur die belegten Pins 1, 2, 3 und 6 miteinander. E94YCEI004A Abb.
-
Seite 27: Elektrische Installation Spannungsversorgung
Installation Elektrische Installation Spannungsversorgung 5.2.5 Spannungsversorgung Interne Spannungsversorgung Hinweis! Die Vorgabe der internen Spannungsversorgung ist bei Grundgeräten mit erweiterter AIF−Schnittstellenöffnung (z. B. Frontseite 8200 vector) gegeben. Die in der Grafik grau hervorgehobene Fläche kennzeichnet die Jumper−Position. Im Auslieferungszustand des Grundgerätes werden diese nicht intern ƒ... -
Seite 28: Daten Der Anschlussklemmen
Installation Elektrische Installation Spannungsversorgung Daten der Anschlussklemmen Bereich Werte Elektrischer Anschluss Steckerleiste mit Schraubanschluss Anschlussmöglichkeiten starr: 1.5 mm (AWG 16) flexibel: ohne Aderendhülse 1.5 mm (AWG 16) mit Aderendhülse, ohne Kunststoffhülse 1.5 mm (AWG 16) mit Aderendhülse, mit Kunststoffhülse 1.5 mm (AWG 16) Anzugsmoment 0.5 ... -
Seite 29: Synchronisation Des Grundgerätes
U = 24 V DC (20.4 V − 0 % ... 28.8 V + 0 %) Sync−Ausgang (t = 150 ms, I = 10 mA bei 24 V) − Bezugspotenzial für externe Sync−Versorgung Auf ^ 61 finden Sie eine Übersicht der Lenze−Grundgeräte, die eine Synchronisation un- terstützen. EDSMF2192IB DE 4.0... -
Seite 30: Inbetriebnahme
Inbetriebnahme Während der Inbetriebnahme werden dem Antriebsregler anlagenspezifische Daten wie z. B. Motorparamter, Betriebsparameter, Reaktionen und Parameter zur Feldbus−Kommu- nikation vorgegeben. Dies geschieht bei Lenze−Geräten über die sogenannten Codestel- len. Die Codestellen sind in nummerisch aufsteigender Reihenfolge im Lenze−Antriebsregler und in den aufgesteckten Kommunikations−/Funktionsmodulen gespeichert. -
Seite 31: Leitsystem (Master) Konfigurieren
6.2.2 Automatische Geräteerkennung Für eine fehlerfreie Einbindung der EtherCAT−Slaves in eine Master−Konfiguration ist ƒ es notwendig, das richtige Lenze−Gerät in der EtherCAT−Konfigurationssoftware auszuwählen. Ein EtherCAT−Teilnehmer wird über die Konfigurationssoftware durch den ƒ Produktcode (identisch mit dem CoE−Objekt I−1018.2), die Herstellerkennung (0x3B) und den Softwarehauptstand des Kommunikationsmoduls eindeutig identifiziert. -
Seite 32: Prozessdaten Konfigurieren
Inbetriebnahme Leitsystem (Master) konfigurieren Prozessdaten konfigurieren 6.2.3 Prozessdaten konfigurieren Die Prozessdaten−Konfiguration wird während der Initialisierungsphase des Masters ƒ festgelegt (PDO−Mapping). Die Prozessdaten−Konfiguration ist applikationsspezifisch in den ƒ Gerätebeschreibungsdateien vordefiniert und kann bei Bedarf durch den Anwender angepasst werden. 6.2.4 Zykluszeit festlegen Die Prozessdaten−Objekte (PDO) werden zyklisch zwischen dem EtherCAT−Master und den Slaves (Antriebsreglern) übertragen. -
Seite 33: Synchronisation Mit "Distributed Clocks" (Dc)
Inbetriebnahme Synchronisation mit "Distributed clocks" (DC) Synchronisation mit "Distributed clocks" (DC) Die Funktionalität "Distributed clocks" (DC) ermöglicht einen exakten Zeitabgleich für Ap- plikationen, in denen mehrere Hilfsachsen zeitgleich eine koordinierte Bewegung durch- führen. Die Datenübernahme erfolgt dabei synchron mit dem PLC−Programm. Bei der DC− Synchronisation werden alle Slaves mit einer Referenzuhr, dem sogenannten "DC−Master", synchronisiert. -
Seite 34: Vorbereitung / Installation
Inbetriebnahme von Lenze−Geräten im EtherCAT−Netzwerk. 6.3.1 Vorbereitung / Installation Hinweis! Lenze Geräte ohne externen Sync−Klemmeneingang unterstützen keine DC−Synchronisation. Verbinden Sie den Sync−Klemmenblock des EtherCAT−Kommunkationsmoduls mit der Spannungsversorgung und der entsprechenden Eingangsklemme des Grundgerätes (siehe ¶ 29 und Dokumentation zum Grundgerät). -
Seite 35: Verhalten Der Lenze Ethercat−Teilnehmer Beim Starten
Inbetriebnahme Synchronisation mit "Distributed clocks" (DC) Verhalten der Lenze EtherCAT−Teilnehmer beim Starten 6.3.4 Verhalten der Lenze EtherCAT−Teilnehmer beim Starten Bei verwendeter DC−Synchronisation wechselt das Kommunikationsmodul erst in den Zu- stand "Operational", wenn das Grundgerät seine Phasenlage an das DC−Signal angepasst hat. -
Seite 36: Erstes Einschalten
Inbetriebnahme Erstes Einschalten Erstes Einschalten Schalten Sie den Antriebsregler ein und kontrollieren Sie seine Betriebsbereitschaft an- hand der Diagnose−LEDs auf der Frontseite des Kommunikationsmoduls. Rote Diagnose−LEDs dürfen nicht leuchten. ƒ Folgende Signalisierung sollte zu sehen sein: ƒ Beschreibung Pos. Farbe Zustand grün blinkt... -
Seite 37: Datentransfer
Datentransfer Datentransfer Bei EtherCAT werden Daten in sogenannten "EtherCAT−Frames" übertragen. Die Ether- CAT−Teilnehmer entnehmen nur die für sie bestimmten Daten, während der EtherCAT− Frame das Gerät durchläuft. Ebenso werden Ausgangsdaten während des Durchlaufs in den Frame eingefügt. Lese− und Schreibzugriffe werden dabei immer nur auf einem klei- nen Ausschnitt des gesamten EtherCAT−Frames ˘... -
Seite 38: Ethercat−Frame−Struktur
Datentransfer EtherCAT−Frame−Struktur EtherCAT−Frame−Struktur EtherCAT−Frames haben folgenden Aufbau: Ethernet Header Ethernet Data 48 Bits 48 Bits 16 Bits 11 Bits 1 Bit 4 Bits 48 ... 1498 Bytes 32 Bits Destination Source EtherType Frame Header Datagrams Length Reserved Type Ethernet Header Der Ethernet Header beinhaltet folgende Informationen: Zieladresse des EtherCAT−Frames (Destination) ƒ... -
Seite 39: Ethercat−Datagramme
Datentransfer EtherCAT−Datagramme EtherCAT−Datagramme EtherCAT−Datagramme haben folgenden Aufbau: EtherCAT Data Command Header 10 Bytes max. 1486 Bytes 2 Bytes EtherCAT Command Header Der EtherCAT Command Header beinhaltet folgende Informationen: Auszuführendes Kommando Adressierungsinformationen Längenangabe des Datenbereiches (Data) Interrupt−Feld Data Der Datenbereich beinhaltet die Daten des auszuführenden Kommandos. Der Working Counter wird vom Master zur Überwachung der Ausführung des Komman- dos ausgewertet. -
Seite 40: Ethercat−Statusmaschine
Datentransfer EtherCAT−Statusmaschine EtherCAT−Statusmaschine Bevor die Kommunikation über EtherCAT möglich ist, durchläuft der Feldbus beim Hoch- fahren die EtherCAT−Statusmaschine. Die folgende Abbildung zeigt die möglichen Zu- standswechsel aus Sicht eines EtherCAT−Slaves: Init Pre-Operational Safe-Operational Operational E94AYCET009 Abb. 7−1 EtherCAT−Statusmaschine Zustand Beschreibung Init Initialisierungsphase Keine SDO/PDO−Kommunikation mit den Slaves... -
Seite 41: Prozessdaten−Transfer
Prozessdaten−Transfer Prozessdaten−Transfer Die Prozessdaten werden mittels sogenannter "EtherCAT−Datagramme" (¶ 39) ƒ über den CoE−Prozessdatenkanal übertragen. Mit den Prozessdaten wird der Antriebsregler gesteuert. ƒ Die Übertragung von Prozessdaten ist zeitkritisch. ƒ Prozessdaten werden zyklisch zwischen dem Leitsystem (Master) und den ƒ Antriebsreglern (Slaves) übertragen (ständiger Austausch aktueller Eingangs−... -
Seite 42: Parameterdaten−Transfer
übertragen. Die SDO−Dienste ermöglichen den schreibenden und lesenden Zugriff auf das Objektverzeichnis. Über den SDO−Kanal wird der Zugriff auf alle implementierten CoE−Objekten (¶ 55) ƒ und Lenze−Codestellen (¶ 57) mit dem CoE−Protokoll ermöglicht. Wird im Antriebsregler eine "CiA402"−Technologieapplikation eingesetzt, ist der ƒ Zugriff auf alle implementierten CANopen CiA402−Objekte möglich. -
Seite 43: Parameter Lesen Und Schreiben
Materialien in einer Maschine eingestellt. werden mit niedriger Priorität übertragen. ƒ Die zu verändernden antriebsspezifischen Parameter sind bei Lenze−Antriebsreglern in Co- destellen enthalten oder beim CANopen−Geräteprofil "CiA402" als Geräteprofil−Objekte. Indizierung der Lenze−Codestellen Die Codestellen des Antriebreglers werden beim Zugriff über ein Kommunikationsmodul durch den Index adressiert. -
Seite 44: Parameter Lesen (Expedited Upload)
Parameterdaten−Transfer Parameter lesen und schreiben Parameter lesen (Expedited Upload) 9.2.1 Parameter lesen (Expedited Upload) 1. Der Master sendet "Initiate Domain Upload Request". 2. Der Slave quittiert die Anforderung mit einer positiven Antwort ("Initiate Domain Upload Response"). Im Fehlerfall antwortet der Slave mit "Abort Domain Transfer". Hinweis! Achten Sie bei Aufträgen für den Antriebsregler auf eine entsprechende Umwandlung der Codestelle in einen Index (¶... - Seite 45 Parameterdaten−Transfer Parameter lesen und schreiben Parameter lesen (Expedited Upload) SDO Upload Expedited Response Ein "SDO Upload Expedited Response" erfolgt, wenn die Datenlänge der zu lesenden Para- meterdaten bis zu 4 Bytes beträgt. Detaillierte Aufschlüsselung der Daten für einen "SDO Upload Expedited Response": SDO−Frame Datenfeld Datentyp / Länge...
- Seite 46 Parameterdaten−Transfer Parameter lesen und schreiben Parameter lesen (Expedited Upload) SDO Upload Normal Response Ein "SDO Upload Normal" erfolgt, wenn die Datenlänge der zu lesenden Parameterdaten ³ 4 Bytes beträgt. Detaillierte Aufschlüsselung der Daten für einen "SDO Upload Normal Response": SDO−Frame Datenfeld Datentyp / Länge Wert [hex] / Beschreibung...
- Seite 47 Parameterdaten−Transfer Parameter lesen und schreiben Parameter lesen (Expedited Upload) Beispiel Die übertragene Response−Struktur bei einem Upload auf den Index 0x5FD8 (Standard- wert von C00039/1 = 0x0FA0) enthält folgende Daten: SDO−Frame Datenfeld Datentyp / Länge Wert [hex] / Beschreibung Bereich Mailbox Header Length WORD 2 Bytes...
-
Seite 48: Parameter Lesen Und Schreiben Parameter Schreiben (Expedited Download)
Parameterdaten−Transfer Parameter lesen und schreiben Parameter schreiben (Expedited Download) 9.2.2 Parameter schreiben (Expedited Download) 1. Der Master sendet "Initiate Domain Download Request". 2. Der Slave quittiert die Anforderung mit einer positiven Antwort ("Initiate Domain Download Response"). Im Fehlerfall antwortet der Slave mit "Abort Domain Transfer". Hinweis! Achten Sie bei Aufträgen für den Antriebsregler auf eine entsprechende Umwandlung der Codestelle in einen Index (¶... -
Seite 49: Detaillierte Aufschlüsselung Der Daten Für Einen "Sdo Download Normal Request"
Parameterdaten−Transfer Parameter lesen und schreiben Parameter schreiben (Expedited Download) SDO Download Normal Request Ein "SDO Download Normal Request" erfolgt, wenn die Datenlänge der zu schreibenden Parameterdaten ³ 4 Bytes beträgt. Detaillierte Aufschlüsselung der Daten für einen "SDO Download Normal Request": SDO−Frame Datenfeld Datentyp / Länge... - Seite 50 Parameterdaten−Transfer Parameter lesen und schreiben Parameter schreiben (Expedited Download) SDO Download Response Detaillierte Aufschlüsselung der Daten für einen "SDO Download Response": SDO−Frame Datenfeld Datentyp / Länge Wert / Beschreibung Bereich Mailbox Header Length WORD 2 Bytes 0x0A: Länge der Mailbox−Servicedaten Address WORD 2 Bytes...
- Seite 51 Parameterdaten−Transfer Parameter lesen und schreiben Parameter schreiben (Expedited Download) Beispiel Die übertragene Request−Struktur bei einem Download vom Index 0x1600 enthält fol- gende Daten: SDO−Frame Datenfeld Datentyp / Länge Wert [hex] / Beschreibung Bereich Mailbox Header Length WORD 2 Bytes 0xA: Länge der Mailbox−Servicedaten Address WORD 2 Bytes...
-
Seite 52: Sdo−Abbruchcodes (Abort Codes)
Parameterdaten−Transfer Parameter lesen und schreiben SDO−Abbruchcodes (Abort codes) SDO−Abbruchcodes (Abort codes) Wird eine SDO−Anforderung negativ bewertet, so wird ein entsprechender Fehlercode aus- gegeben: Index [hex] Beschreibung 0x00000000 Kein Fehler 0x05030000 Der Zustand des Toggle−Bit hat sich nicht geändert. 0x05040000 SDO−Protokoll Zeitüberschreitung 0x05040001 Ungültiges oder unbekanntes Spezifikationssymbol für den Client/Server−Befehl 0x05040002... -
Seite 53: Diagnose
Diagnose LED−Statusanzeigen Diagnose Zur Störungsdiagnose stehen für das Kommunikationsmodul die auf der Frontseite plat- zierten LEDs zur Verfügung. 10.1 LED−Statusanzeigen 2192ECAT001B Abb. 10−1 LEDs des Kommunikationsmoduls Beschreibung Pos. Farbe Zustand grün blinkt Die EtherCAT−Verbindung ist vorhanden. Die Datenkommunikation der EtherCAT−Verbindung ist aktiv. grün Das Kommunikationsmodul ist nicht mit Spannung versorgt. -
Seite 54: Emergency Requests / Emergency−Meldungen
Diagnose Emergency Requests / Emergency−Meldungen 10.2 Emergency Requests / Emergency−Meldungen Emergency−Meldungen werden einmalig an den EtherCAT−Master gesendet, wenn sich der Fehlerzustand des Antriebsreglers/Kommunikationsmoduls ändert, d. h..beim Auftreten eines Fehlers des Antriebsreglers/Kommunikationsmoduls; ƒ beim Wegfall eines Fehlers des Antriebsreglers/Kommunikationsmoduls. ƒ... -
Seite 55: Anhang
Anhang 11.1 Implementierte CoE−Objekte Lenze−Geräte können sowohl mit Lenze−Codestellen als auch mit den herstellerunabhän- gigen "CoE−Objekten" parametriert werden. Für eine vollständig EtherCAT−konforme Kommunikation dürfen ausschließlich nur die CoE−Objekte zur Parametrierung benutzt werden. Die in dieser Dokumenation beschriebenen CoE−Objekte sind in der "EtherCAT Specification, Part 6 ˘... - Seite 56 Anhang Implementierte CoE−Objekte Index Name Index Subindex Name Subindex Datentyp Bits Zugriff 0x1000 Device Type − − UDINT 0x1008 Device Name − − STRING(30) 0x1009 Hardware Version − − STRING(2) 0x100A Software Version − − STRING(30) 0x1018 Identity Number of elements USINT Vendor ID UDINT...
-
Seite 57: Codestellen
Codestellen 11.2 Codestellen Auf die in der Tabelle angegebenen Objekte kann per EtherCAT−Feldbus zugegriffen wer- den. Die Objekte sind in der Lenze−Codestellenstruktur implementiert. Schreibbare Code- stellen werden permanent gespeichert und bleiben nach dem Ausschalten des Kommu- nikationsmoduls erhalten. Tipp! Die Codestellen sind im Objektverzeichnis der EtherCAT−Konfigurationstools sichtbar. - Seite 58 Anhang Codestellen Codestellen−Beschreibung Parameter Name Datentyp: STRING (30) C1810 Software−Kennung des Moduls Index: 22765 = 58ED Die Software−Kennung des Kommunikationsmoduls wird hier ausgegeben. Anzeige: "33S2192I_xy000" (xy = Version x.y) Parameter Name Datentyp: STRING (30) C1811 Software−Erstellungsdatum Index: 22764 = 58EC Das Software−Erstellungsdatum ("MM TT JJJJ") und die Uhrzeit ("hh:mm:ss") werden hier ausgegeben.
- Seite 59 65535 0 Parameter Name Datentyp: FIX32 C1882 Reaktion beim Verlassen von "Operational" Index: 22693 = 58A5 Einstellbare Reaktion für die Prozessdaten−Überwachung Auswahlliste Info (Lenze−Einstellung fettgedruckt) 0 Keine Reaktion 1 Fehler (TRIP) 2 Reglersperre (CINH) 3 Schnellhalt (QSP) EDSMF2192IB DE 4.0...
- Seite 60 Mit dem Wert = 65535 wird die Überwachung deaktiviert. Mit dem Wert = 0 erfolgt die sofortige Reaktion nach Ablauf der internen Busstatus−Watchdog−Zeit Eine Änderung der Überwachung wird sofort wirksam. Einstellbereich Lenze−Einstellung (min. Wert | Einheit | max. Wert) 65535 65535 ms EDSMF2192IB DE 4.0...
-
Seite 61: Produktcodes Der Lenze Grundgeräte
Anhang Produktcodes der Lenze Grundgeräte 11.3 Produktcodes der Lenze Grundgeräte Produktcode Bedeutung Sync− Anzahl AIF−Status−/ [dezimal] Unterstützung Prozessdaten- Steuerwort wörter 21920000 generisch − − − 21920100 8200 vector − − 21920101 8200 vector − − in Kombination mit Funktionsmodul Application I/O... -
Seite 62: Stichwortverzeichnis
Identfikation, 13 Implementierte CoE−Objekte, 55 Inbetriebnahme, 30 Eigenschaften des Kommunikationsmoduls, 14 − Erstes Einschalten, 36 Einschalten, erstes, 36 Indizierung der Lenze−Codestellen, 43 Elektrische Installation, 22 Installation, 20 Emergency Requests / Emergency−Meldungen, 54 − elektrisch, 22 Emergency−Meldung (Aufbau), 54 − mechanisch, 21 EMV−gerechte Verdrahtung, 22... - Seite 63 − Bestimmungsgemäße Verwendung, 12 Produktcodes der Lenze Grundgeräte, 61 Vendor−ID, 16 Produkteigenschaften, 14 Verbindungsaufbau zwischen Master und Slave, 42 Prozessdaten konfigurieren, 32 Verhalten der Lenze EtherCAT−Teilnehmer beim Starten, Prozessdaten−Transfer, 41 Working Counter (WKC), 39 Restgefahren, 11 Revision−ID, 16 Zykluszeit festlegen, 32 Schnittstelle für Kommunikation, 16...
- Seite 64 Q ã © 03/2016 Lenze Automation GmbH Service Lenze Service GmbH Postfach 10 13 52, 31763 Hameln Breslauer Straße 3, 32699 Extertal Hans−Lenze−Str. 1, 31855 Aerzen GERMANY GERMANY HR Hannover B 205381 +49 5154 82−0 008000 2446877 (24 h helpline) Ê...