Beckhoff EL2044 Dokumentation

Verwandte Anleitungen für Beckhoff EL2044












Inhaltszusammenfassung für Beckhoff EL2044
- Seite 1 Dokumentation | DE EL2044 Vierkanalige Digitale Ausgangsklemmen, 24 V DC, 2 A, mit erweiterter Diagnose 27.08.2020 | Version: 1.0...
-
Seite 3: Inhaltsverzeichnis
Inhaltsverzeichnis 1 Vorwort ............................... 5 Hinweise zur Dokumentation ...................... 5 Sicherheitshinweise ........................... 6 Ausgabestände der Dokumentation .................... 7 Versionsidentifikation von EtherCAT-Geräten ................... 7 1.4.1 Beckhoff Identification Code (BIC)................... 10 2 Produktübersicht ............................. 12 Einführung ............................ 12 Technische Daten.......................... 13 Anschlussbelegung und LEDs...................... 14 Überlastschutz .......................... 14 Betriebsmodi und Einstellungen ...................... 17 2.5.1... - Seite 4 6.3.2 Erläuterungen zur Firmware .................. 127 6.3.3 Update Controller-Firmware *.efw ................. 129 6.3.4 FPGA-Firmware *.rbf ..................... 130 6.3.5 Gleichzeitiges Update mehrerer EtherCAT-Geräte ............ 134 Firmware Kompatibilität - Passive Klemmen ................. 135 Wiederherstellen des Auslieferungszustandes................ 135 Support und Service ........................ 136 Version: 1.0 EL2044...
-
Seite 5: Vorwort
Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. -
Seite 6: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 7: Ausgabestände Der Dokumentation
Dokumentation angegeben. Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL- Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“. -
Seite 8: Abb. 1: El5021 El-Klemme, Standard Ip20-Io-Gerät Mit Seriennummer/ Chargennummer Und Revisionskennzeichnung (Seit 2014/01)
Vorwort Produktionslos/Chargennummer/Batch-Nummer/Seriennummer/Date Code/D-Nummer Als Seriennummer bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf dem Gerät aufgedruckt oder auf einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand im Auslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nicht die Module einer Charge. -
Seite 9: Abb. 2 Ek1100 Ethercat Koppler, Standard Ip20-Io-Gerät Mit Seriennummer/ Chargennummer
Vorwort Abb. 2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer Abb. 3: EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418 EL2044 Version: 1.0... -
Seite 10: Beckhoff Identification Code (Bic)
Vorwort 1.4.1 Beckhoff Identification Code (BIC) Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff-Produkten zur eindeutigen Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016. Abb. 4: BIC als Data Matrix Code (DMC, Code-Schema ECC200) Die Einführung des BIC erfolgt schrittweise über alle Produktgruppen hinweg. - Seite 11 Beispiel einer zusammengesetzten Information aus den Positionen 1 bis 4 und 6. Die Datenidentifikatoren sind zur besseren Darstellung jeweils rot markiert: Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr. 2). Die BTN ist eine eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen Seriennummern- Systeme bei Beckhoff ersetzen wird (z.
-
Seite 12: Produktübersicht
Leuchtdioden angezeigt. Als Diagnoseinformationen werden Übertemperatur und fehlende Versorgungsspannung der Klemme geliefert. Darüber hinaus kann jeder Kanal einzeln u. a. einen Kurzschluss melden. Durch die Diagnose wird die Wartung der Applikation vereinfacht. Die Powerkontakte sind durchverbunden. Die Ausgänge werden bei der EL2044 über den 24-V- Powerkontakt gespeist. HINWEIS Watchdog-Einstellungen Beachten Sie die Anmerkungen im Kapitel „Hinweise zur Watchdogeinstellung [} 33]“! -
Seite 13: Technische Daten
Produktübersicht Technische Daten Technische Daten EL2044 Anschlusstechnik 2-Leiter Anzahl Ausgänge Nennspannung 24 V (-15% / +20%) Lastart ohmsch, induktiv, Lampenlast bis max. 24 W Ausgangsstrom max. 2 A (kurzschlussfest) je Kanal, mit Diagnose Ausgangsstufe Push (HighSide-Switch) Kurzschlussstrom < 4 A typ. Verpolungsschutz Schaltzeiten : 50 µs typ., T : 100 µs typ. -
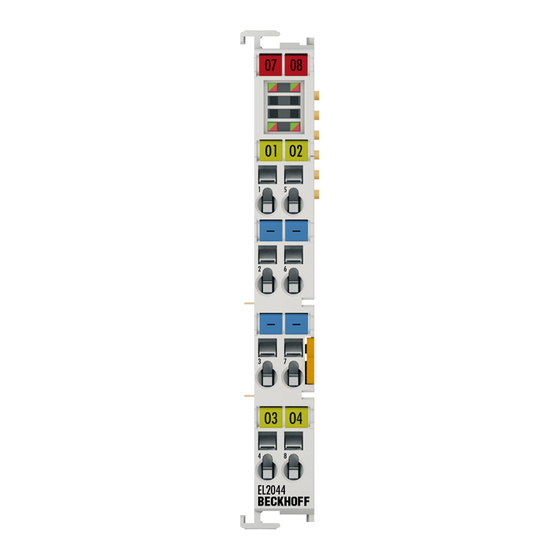
Seite 14: Anschlussbelegung Und Leds
Produktübersicht Anschlussbelegung und LEDs Abb. 6: EL2044 EL2044 - LEDs Farbe Bedeutung OUTPUT 1 - 4 grün Kein Ausgangssignal Ausgangssignal 24 V ERROR: Overcurrent / Overtemperature rot blinkend ERROR: Short circuit to 24 V rot / grün im Wechsel ERROR: Open Load EL2044 - Anschlussbelegung... -
Seite 15: Abb. 7 Strombegrenzung Bei Überlast
Kurzschluss oder länger andauernde Überlast an einem Kanal führen zu einem Anstieg der Gerätetemperatur. Sind mehrere Kanäle überlastet führt dieses zu einem schnellen Anstieg der Gerätetemperatur. Beim Überschreiten der Obergrenze für die Gerätetemperatur werden die überlasteten EL2044 Version: 1.0... -
Seite 16: Schutz Vor Hohen Induktionsspannungen
Millisekunden geöffnet. Es werden Abschaltzeiten realisiert, die etwa der Einschaltzeit der Spule entsprechen. Schutz vor hohen Induktionsspannungen Als Schutz gegen Spannungsspitzen beim Abschalten induktiver Lasten empfehlen wir, geeignete Schutzbeschaltungen (z. B. mittels Freilaufdiode, RC-Glied oder Varistor) direkt beim Aktor vorzu- sehen. Abb. 9: Abschalten induktiver Lasten Version: 1.0 EL2044... -
Seite 17: Betriebsmodi Und Einstellungen
2.5.1 Prozessdaten Parametrierung Im TwinCAT System Manager wird eine EL2044 über zwei Reiter parametriert, der Prozessdatenreiter (A) für die kommunikationsspezifischen Einstellungen und das CoE-Verzeichnis (B) für Einstellungen im Slave. Abb. 10: EL2044 - Reiter „Prozessdaten“ • Änderungen in den prozessdatenspezifischen Einstellungen sind generell erst nach einem Neustart des EtherCAT Masters wirksam: Neustart TwinCAT im RUN oder CONFIG Mode;... -
Seite 18: Abb. 11 El2044 Online - Darstellung Der Prozessdaten Und Strukturinhalte Im System Manager
Auswahldialog „Predefined PDO Assignment“ (ab TwinCAT 2.11 build 1544) Die zu übertragenden Prozessdaten (PDO, ProcessDataObjects) können durch den Benutzer • für alle TwinCAT Versionen über den Auswahldialog „Predefined PDO Assignment“ (s. Abb. „EL2044 Reiter Prozessdaten“ A) oder • selektiv für einzelne PDO (s. Abb. „EL2044 Reiter Prozessdaten“ B) ausgewählt werden. -
Seite 19: Abb. 12 El2044 Reiter „Prozessdaten
Produktübersicht Abb. 12: EL2044 Reiter „Prozessdaten“ Auswahl des Diagnoseumfangs über Auswahldialog „Predefined PDO Assignment“ Anzeige (optionaler) PDO (Prozessdatenobjekte) Auswahl des benötigten Sync Manager Anzeige der zur Auswahl stehenden PDO Es können drei vordefinierte PDO Zuordnungen ausgewählt werden: • Full Diagnostics: Inputs: Auswahl der PDO 0x1A00 (kanalweise Diagnose) und 0x1A02 (Diagnose Gerät). Es werden sowohl die Diagnosedaten je Kanal als auch die Daten zur Gerätediagnose dargestellt und übertragen. -
Seite 20: Diagnose Kanalweise
Bei gesetztem „Undervoltage“ - Bit (Index 0xF600:13) ist die Versorgungsspannung der Klemme unter 17 V typ. gesunken. Spannungsverlust (Index 0xF600:14) Bei gesetztem Fehlerbit in „Missing Voltage“ (Index 0xF600:14) ist die Versorgungsspannung der Klemme auf einen Wert unter 14 V typ. gesunken. Version: 1.0 EL2044... -
Seite 21: Einstellungen Über Das Coe - Verzeichnis
Einstellungen über das CoE - Verzeichnis CoE - online Verzeichnis Abb. 13: EL2044 - CoE - Verzeichnis Ist die Klemme online, d. h. am EtherCAT-Master TwinCAT angeschlossen und im fehlerfreien RUN-State (WorkingCounter = 0), sind die Online-Daten zugänglich (A). In den Einträgen „DIG Safe State Active Ch.n“... -
Seite 22: Abb. 14 Zustandsänderung Der Ausgänge Bei Busfehler
3. „DIG Safe State Active“ = FALSE ◦ Der Zustand des Ausgangs bleibt erhalten. Einträge in „DIG Safe State Value“ (Index 0x80n1:01) haben keine Wirkung. Darstellung des Ablaufs bei Busfehler als Flussdiagramm Abb. 14: Zustandsänderung der Ausgänge bei Busfehler Version: 1.0 EL2044... -
Seite 23: Objektbeschreibung Und Parametrierung
Die Parametrierung der Klemme wird über den Coe – Online Reiter (mit Doppelklick auf das ent- sprechende Objekt) bzw. über den Prozessdaten Reiter die Zuordnung der PDOs vorgenommen. Einführung In der CoE-Übersicht sind Objekte mit verschiedenem Einsatzzweck enthalten: EL2044 Version: 1.0... -
Seite 24: Restore-Objekt
Index FB00 DIG Command Index (hex) Name Bedeutung Datentyp Flags Default FB00:0 DIG Command Maximaler Subindex UINT8 0x03 (3 FB00:01 Request reserviert OCTET - STRING[2] FB00:02 Status reserviert UINT8 0x00 (0 FB00:03 Response reserviert OCTET - STRING[4] Version: 1.0 EL2044... -
Seite 25: Eingangsdaten
Index 1000 Device type Index (hex) Name Bedeutung Datentyp Flags Default 1000:0 Device type Geräte-Typ des EtherCAT-Slaves: Das Lo-Word ent- UINT32 0x01181389 hält das verwendete CoE Profil (5001). Das Hi-Word (18355081 enthält das Modul Profil entsprechend des Modular Device Profile. EL2044 Version: 1.0... - Seite 26 Produktübersicht Index 1008 Device name Index (hex) Name Bedeutung Datentyp Flags Default 1008:0 Device name Geräte-Name des EtherCAT-Slave STRING EL2044 Index 1009 Hardware version Index (hex) Name Bedeutung Datentyp Flags Default 1009:0 Hardware version Hardware-Version des EtherCAT-Slaves STRING Index 100A Software version...
- Seite 27 Sync-Manager Type Channel 2: Mailbox Read UINT8 0x02 (2 1C00:03 SubIndex 003 Sync-Manager Type Channel 3: Process Data Write UINT8 0x03 (3 (Outputs) 1C00:04 SubIndex 004 Sync-Manager Type Channel 4: Process Data Read UINT8 0x04 (4 (Inputs) EL2044 Version: 1.0...
- Seite 28 TxPDO Mapping Objekts) (6658 1C13:03 Subindex 003 UINT16 1C13:04 Subindex 004 UINT16 1C13:05 Subindex 005 UINT16 1C13:06 Subindex 006 UINT16 1C13:07 Subindex 007 UINT16 1C13:08 Subindex 008 UINT16 1C13:09 Subindex 009 UINT16 1C13:0A Subindex 010 UINT16 Version: 1.0 EL2044...
- Seite 29 DC-Mode) 1C32:07 Minimum delay time Minimale Zeit zwischen SYNC1 Event und Ausgabe UINT32 0x00000000 der Outputs (in ns) 0, da EL2044 den DC-Mode nicht unterstützt 1C32:08 Command • 0: Messung der lokalen Zykluszeit wird UINT16 0x0000 (0 gestoppt •...
- Seite 30 Eingänge für den Master (in ns, nur DC-Mode) 1C33:07 Minimum delay time Min. Zeit zwischen SYNC1-Event und Einlesen der UINT32 0x00000000 Eingänge (in ns, nur DC-Mode) 0, da EL2044 den DC-Mode nicht unterstützt 1C33:08 Command • 0: Messung der lokalen Zykluszeit wird UINT16 0x0000 (0 gestoppt •...
- Seite 31 Profil 280 (Extended Digital Input and Output with Dia- UINT32 0x00000118 gnostics) (280 F010:03 SubIndex 003 Profil 280 (Extended Digital Input and Output with Dia- UINT32 0x00000118 gnostics) (280dez) F010:04 SubIndex 004 Profil 280 (Extended Digital Input and Output with Dia- UINT32 0x00000118 gnostics) (280 EL2044 Version: 1.0...
-
Seite 32: Grundlagen Der Kommunikation
Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten von Beckhoff sowohl symmetrisch (1:1) belegte als auch Cross-Over-Kabel verwenden. Empfohlene Kabel Geeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Website! E-Bus-Versorgung Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, in der Regel ist ein Koppler dabei bis zu 2 A belastbar (siehe Dokumentation des jeweiligen... -
Seite 33: Allgemeine Hinweise Zur Watchdog-Einstellung
Slave. Mit dem PDI-Watchdog kann diese Kommunikation auf Ausfall überwacht werden. Der PDI-Watchdog ist also eine Überwachung auf korrekte und rechtzeitige Prozessdatenkommunikation mit dem ESC, aber von der Applikations-Seite aus betrachtet. Die Einstellungen für SM- und PDI-Watchdog sind im TwinCAT System Manager für jeden Slave gesondert vorzunehmen: EL2044 Version: 1.0... -
Seite 34: Abb. 17 Karteireiter Ethercat -> Erweiterte Einstellungen -> Verhalten --> Watchdog
Die Checkbox erlaubt eine manuelle Einstellung der Watchdog-Zeiten. Sind die Ausgänge gesetzt und tritt eine EtherCAT-Kommunikationsunterbrechung auf, löst der SM-Watchdog nach der eingestellten Zeit ein Löschen der Ausgänge aus. Diese Einstellung kann dazu verwendet werden, um eine Klemme an langsame Version: 1.0 EL2044... -
Seite 35: Ethercat State Machine
Hochlaufs des Slaves müssen in jedem State spezifische Kommandos vom EtherCAT Master zum Gerät gesendet werden. Es werden folgende Zustände unterschieden: • Init • Pre-Operational • Safe-Operational und • Operational • Boot Regulärer Zustand eines jeden EtherCAT Slaves nach dem Hochlauf ist der Status OP. EL2044 Version: 1.0... -
Seite 36: Abb. 18 Zustände Der Ethercat State Machine
Einstellungen im SAFEOP und OP in einen sicheren Zustand - je nach Gerät und Einstellung z. B. auf AUS. Wird dies durch Deaktivieren der Watchdogüberwachung im Modul unterbunden, können auch im Geräte-Zustand SAFEOP Ausgänge geschaltet werden bzw. gesetzt bleiben. Version: 1.0 EL2044... -
Seite 37: Coe-Interface
Parametern in 0x4000 ausgerüstet wurden und auf 0x8000 umgestellt wurden, unterstützen aus Kompatibilitätsgründen beide Bereiche und spiegeln intern. • 0x6000: hier liegen die Eingangs-PDO („Eingang“ aus Sicht des EtherCAT-Masters) • 0x7000: hier liegen die Ausgangs-PDO („Ausgang“ aus Sicht des EtherCAT-Masters) EL2044 Version: 1.0... -
Seite 38: Verfügbarkeit
Indizes und geben sie einen entsprechenden Wert im „SetValue“-Dialog ein. • aus der Steuerung/PLC über ADS z. B. durch die Bausteine aus der TcEtherCAT.lib Bibliothek Dies wird für Änderungen während der Anlangenlaufzeit empfohlen oder wenn kein System Manager bzw. Bedienpersonal zur Verfügung steht. Version: 1.0 EL2044... -
Seite 39: Datenerhaltung
Grundlagen der Kommunikation Datenerhaltung Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherwei- se ausfallsicher im Gerät (EEPROM) gespeichert. D. h. nach einem Neustart (Repower) sind die veränderten CoE-Parameter immer noch erhalten. Andere Hersteller können dies anders handhaben. -
Seite 40: Abb. 21 Offline-Verzeichnis
◦ wird das reale aktuelle Verzeichnis des Slaves ausgelesen. Dies kann je nach Größe und Zykluszeit einige Sekunden dauern. ◦ wird die tatsächliche Identität angezeigt ◦ wird der Firmware- und Hardware-Stand des Gerätes laut elektronischer Auskunft angezeigt ◦ ist ein grünes Online zu sehen Version: 1.0 EL2044... -
Seite 41: Abb. 22 Online-Verzeichnis
• Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255 • Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255 • Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255 • ... Allgemein wird dies geschrieben als 0x80n0. Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der Beckhoff Website. EL2044 Version: 1.0... -
Seite 42: Distributed Clock
Umfang von 32 Bit, d.h. nach ca. 4,2 Sekunden läuft die Variable über • Diese lokale Uhr wird vom EtherCAT Master automatisch mit der Master Clock im EtherCAT Bus mit einer Genauigkeit < 100 ns synchronisiert. Detaillierte Informationen entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung. Version: 1.0 EL2044... -
Seite 43: Montage Und Verdrahtung
Personen) • Jede Busstation muss auf der rechten Seite mit der Endkappe EL9011 oder EL9012 abgeschlossen wer- den, um Schutzart und ESD-Schutz sicher zu stellen. Abb. 23: Federkontakte der Beckhoff I/O-Komponenten Tragschienenmontage WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! -
Seite 44: Tragschienenbefestigung
Achten Sie bei der Montage der Komponenten darauf, dass der Verriegelungsmechanismus nicht in Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befesti- gung von Tragschienen mit einer Höhe von 7,5 mm unter den Klemmen und Kopplern flache Mon- tageverbindungen wie Senkkopfschrauben oder Blindnieten. Version: 1.0 EL2044... -
Seite 45: Abb. 25 Demontage Von Tragschiene
EL91xx, EL92xx) unterbrechen die Powerkontakte und stellen so den Anfang einer neuen Ver- sorgungsschiene dar. PE-Powerkontakt Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist aus Sicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125 A ableiten. EL2044 Version: 1.0... -
Seite 46: Beschädigung Des Gerätes Möglich
Klemmen Sie zur Isolationsprüfung die PE- Zuleitung am Buskoppler bzw. der Einspeiseklemme ab! Um weitere Einspeisestellen für die Prüfung zu entkoppeln, können Sie diese Einspeiseklemmen entriegeln und mindestens 10 mm aus dem Verbund der übrigen Klemmen herausziehen. WARNUNG Verletzungsgefahr durch Stromschlag! Der PE-Powerkontakt darf nicht für andere Potentiale verwendet werden! Version: 1.0 EL2044... -
Seite 47: Montagevorschriften Für Erhöhte Mechanische Belastbarkeit
Demontage oder Verdrahtung der Busklemmen beginnen! Übersicht Mit verschiedenen Anschlussoptionen bietet das Busklemmensystem eine optimale Anpassung an die Anwendung: • Die Klemmen der Serien ELxxxx und KLxxxx mit Standardverdrahtung enthalten Elektronik und Anschlussebene in einem Gehäuse. EL2044 Version: 1.0... -
Seite 48: Abb. 27 Standardverdrahtung
Montage dar und verhindert ein Verheddern der einzelnen Anschlussdrähte bei gezogenem Stecker. Leiterquerschnitte von 0,08 mm bis 2,5 mm können weiter in der bewährten Federkrafttechnik verwendet werden. Übersicht und Systematik in den Produktbezeichnungen der Serien ESxxxx und KSxxxx werden wie von den Serien ELxxxx und KLxxxx bekannt weitergeführt. Version: 1.0 EL2044... -
Seite 49: Verdrahtung Hd-Klemmen
Die High-Density-Klemmen der Serien ELx8xx und KLx8xx unterstützen keine steckbare Verdrah- tung. Ultraschall-litzenverdichtete Leiter Ultraschall-litzenverdichtete Leiter An die Standard- und High-Density-Klemmen können auch ultraschall-litzenverdichtete (ultraschall- verschweißte) Leiter angeschlossen werden. Beachten Sie die unten stehenden Tabellen zum Lei- tungsquerschnitt! EL2044 Version: 1.0... -
Seite 50: Verdrahtung
Leiter wird nach dem Abisolieren einfach in die Klemmstelle gesteckt. Das Lösen der Leitungen erfolgt, wie bei den Standardklemmen, über die Kontakt-Entriegelung mit Hilfe eines Schraubendrehers. Den zulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle. Version: 1.0 EL2044... -
Seite 51: Schirmung
Für die optimale Einbaulage wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KL- Klemmen weisen nach vorne (siehe Abb. Empfohlene Abstände bei Standard Einbaulage). Die Klemmen werden dabei von unten nach oben durchlüftet, was eine optimale Kühlung der Elektronik durch Konvektionslüftung ermöglicht. Bezugsrichtung „unten“ ist hier die Erdbeschleunigung. EL2044 Version: 1.0... -
Seite 52: Abb. 31 Empfohlene Abstände Bei Standard Einbaulage
Die Einhaltung der Abstände nach Abb. Empfohlene Abstände bei Standard Einbaulage wird empfohlen. Weitere Einbaulagen Alle anderen Einbaulagen zeichnen sich durch davon abweichende räumliche Lage der Tragschiene aus, s. Abb. „Weitere Einbaulagen“. Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zur Umgebung. Version: 1.0 EL2044... -
Seite 53: Abb. 32 Weitere Einbaulagen
Montage und Verdrahtung Abb. 32: Weitere Einbaulagen EL2044 Version: 1.0... -
Seite 54: Positionierung Von Passiven Klemmen
Stromaufnahme aus dem E-Bus. Um einen optimalen Datenaustausch zu gewährleisten, dürfen nicht mehr als zwei passive Klemmen direkt aneinander gereiht werden! Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt) Abb. 33: Korrekte Positionierung Abb. 34: Inkorrekte Positionierung Version: 1.0 EL2044... -
Seite 55: Inbetriebnahme
• „offline“: der vorgesehene Aufbau wird durch Hinzufügen und entsprechendes Platzieren einzelner Komponenten erstellt. Diese können aus einem Verzeichnis ausgewählt und Konfiguriert werden. ◦ Die Vorgehensweise für den „offline“ – Betrieb ist unter http://infosys.beckhoff.de einsehbar: TwinCAT 2 → TwinCAT System Manager → EA - Konfiguration → Anfügen eines E/A-Gerätes •... -
Seite 56: Abb. 35 Bezug Von Der Anwender Seite (Inbetriebnahme) Zur Installation
• Rechtsseitig angebunden am CX2040 (E-Bus): EL1004 (4-Kanal-Digital-Eingangsklemme 24 V • Über den X001 Anschluss (RJ-45) angeschlossen: EK1100 EtherCAT-Koppler • Rechtsseitig angebunden am EK1100 EtherCAT-Koppler (E-Bus): EL2008 (8-Kanal-Digital-Ausgangsklemme 24 V ; 0,5 A) • (Optional über X000: ein Link zu einen externen PC für die Benutzeroberfläche) Version: 1.0 EL2044... -
Seite 57: Abb. 36 Aufbau Der Steuerung Mit Embedded-Pc, Eingabe (El1004) Und Ausgabe (El2008)
Anzumerken ist, dass sämtliche Kombinationen einer Konfiguration möglich sind; beispielsweise könnte die Klemme EL1004 ebenso auch nach dem Koppler angesteckt werden oder die Klemme EL2008 könnte zusätzlich rechts an dem CX2040 angesteckt sein – dann wäre der Koppler EK1100 überflüssig. EL2044 Version: 1.0... -
Seite 58: Twincat 2
Ist es vorgesehen, die auf einem PLC installierte TwinCAT Laufzeitumgebung von einem anderen System als Entwicklungsumgebung per „remote“ anzusprechen, ist das Zielsystem zuvor bekannt zu machen. Im Menü unter „Aktionen“ → „Auswahl des Zielsystems...“, über das Symbol „ “ oder durch Taste „F8“ wird folgendes Fenster hierzu geöffnet: Version: 1.0 EL2044... -
Seite 59: Abb. 38 Wähle Zielsystem
Abb. 39: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des Zielsystems Ist das Zielsystem eingetragen steht dieses wie folgt zur Auswahl (ggf. muss zuvor das korrekte Passwort eingetragen werden): Nach der Auswahl mit „OK“ ist das Zielsystem über den System Manager ansprechbar. EL2044 Version: 1.0... -
Seite 60: Abb. 40 Auswahl „Gerät Suchen
Klemmen zu ermitteln. „Free Run“ erlaubt das Manipulieren von Ein- und Ausgangswerten innerhalb des „Config Modus“ und sollte ebenfalls bestätigt werden. Ausgehend von der am Anfang dieses Kapitels beschriebenen Beispielkonfiguration [} 56] sieht das Ergebnis wie folgt aus: Version: 1.0 EL2044... -
Seite 61: Abb. 42 Abbildung Der Konfiguration Im Twincat 2 System Manager
TwinCAT PLC Control ist die Entwicklungsumgebung zur Erstellung der Steuerung in unterschiedlichen Programmumgebungen: Das TwinCAT PLC Control unterstützt alle in der IEC 61131-3 beschriebenen Sprachen. Es gibt zwei textuelle Sprachen und drei grafische Sprachen. • Textuelle Sprachen ◦ Anweisungsliste (AWL, IL) EL2044 Version: 1.0... - Seite 62 Nach dem Start von TwinCAT PLC Control wird folgende Benutzeroberfläche für ein initiales Projekt dargestellt: Abb. 44: TwinCAT PLC Control nach dem Start Nun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt und unter dem Namen „PLC_example.pro“ gespeichert worden: Version: 1.0 EL2044...
- Seite 63 Warnung. Im System Manager ist das Projekt des TwinCAT PLC Control zunächst einzubinden. Dies geschieht über das Kontext Menü der „SPS- Konfiguration“ (rechts-Klick) und der Auswahl „SPS Projekt Anfügen…“: Abb. 46: Hinzufügen des Projektes des TwinCAT PLC Control EL2044 Version: 1.0...
- Seite 64 „Verknüpfung Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs) geöffnet: Abb. 48: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten In dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die Variable „bEL1004_Ch4“ vom Typ BOOL selektiert werden: Version: 1.0 EL2044...
- Seite 65 ) an dem gelben bzw. roten Objekt der Variablen zeigt an, dass hierfür eine Verknüpfung existiert. Die Verknüpfungen können z. B. auch überprüft werden, indem „Goto Link Variable“ aus dem Kontextmenü einer Variable ausgewählt wird. Dann wird automatisch das gegenüberliegende verknüpfte Objekt, in diesem Fall das PDO selektiert: EL2044 Version: 1.0...
- Seite 66 Das PLC System kann daraufhin wie im Folgenden beschrieben gestartet werden. Starten der Steuerung Ausgehend von einem remote System muss nun als erstes auch die PLC Steuerung über „Online“ → „Choose Run-Time System…“ mit dem embedded PC über Ethernet verbunden werden: Version: 1.0 EL2044...
- Seite 67 Steuerprogramm geladen, um es ausführen lassen zu können. Dies wird entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen werden?“ bekannt gemacht und ist mit „Ja“ zu beantworten. Die Laufzeitumgebung ist bereit zum Programstart: Abb. 53: PLC Control Logged-in, bereit zum Programmstart EL2044 Version: 1.0...
-
Seite 68: Twincat 3
TwinCAT 3 (Shell) folgende Benutzeroberfläche nach dem Start: Abb. 54: Initale Benutzeroberfläche TwinCAT 3 Zunächst ist die Erstellung eines neues Projekt mittels (oder unter „Datei“→“Neu“→“Projekt…“) vorzunehmen. In dem darauf folgenden Dialog werden die entsprechenden Einträge vorgenommen (wie in der Abbildung gezeigt): Version: 1.0 EL2044... - Seite 69 Ist es vorgesehen, die auf einem PLC installierte TwinCAT Laufzeitumgebung von einem anderen System als Entwicklungsumgebung per „remote“ anzusprechen, ist das Zielsystem zuvor bekannt zu machen. Über das Symbol in der Menüleiste: wird das pull-down Menü aufgeklappt: EL2044 Version: 1.0...
- Seite 70 • die bekannte Rechner - IP oder AmsNetId einzutragen Abb. 58: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des Zielsystems Ist das Zielsystem eingetragen, steht dieses wie folgt zur Auswahl (ggf. muss zuvor das korrekte Passwort eingetragen werden): Version: 1.0 EL2044...
- Seite 71 Klemmen zu ermitteln. „Free Run“ erlaubt das Manipulieren von Ein- und Ausgangswerten innerhalb des „Config Modus“ und sollte ebenfalls bestätigt werden. Ausgehend von der am Anfang dieses Kapitels beschriebenen Beispielkonfiguration [} 56] sieht das Ergebnis wie folgt aus: EL2044 Version: 1.0...
- Seite 72 (im Aufbau vorliegenden) Elemente einliest: Abb. 62: Einlesen von einzelnen an einem Gerät befindlichen Klemmen Diese Funktionalität ist nützlich, falls die Konfiguration (d. h. der „reale Aufbau“) kurzfristig geändert wird. Version: 1.0 EL2044...
- Seite 73 Projektmappen-Explorer durch Auswahl von „Neues Element hinzufügen….“ ein PLC Unterprojekt hinzugefügt: Abb. 63: Einfügen der Programmierumgebung in „SPS“ In dem darauf folgenden geöffneten Dialog wird ein „Standard PLC Projekt“ ausgewählt und beispielsweise als Projektname „PLC_example“ vergeben und ein entsprechendes Verzeichnis ausgewählt: EL2044 Version: 1.0...
- Seite 74 Das durch Auswahl von „Standard PLC Projekt“ bereits existierende Programm „Main“ kann über das „PLC_example_Project“ in „POUs“ durch Doppelklick geöffnet werden. Es wird folgende Benutzeroberfläche für ein initiales Projekt dargestellt: Abb. 65: Initiales Programm „Main“ des Standard PLC Projektes Nun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt worden: Version: 1.0 EL2044...
- Seite 75 Abb. 66: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung) Das Steuerprogramm wird nun als Projektmappe erstellt und damit der Kompiliervorgang vorgenommen: Abb. 67: Kompilierung des Programms starten Anschließend liegen in den „Zuordnungen“ des Projektmappen-Explorers die folgenden – im ST/ PLC Programm mit „AT%“ gekennzeichneten Variablen vor: EL2044 Version: 1.0...
- Seite 76 Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs) für dessen Verknüpfung geöffnet: Abb. 68: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten In dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die Variable „bEL1004_Ch4“ vom Typ BOOL selektiert werden: Version: 1.0 EL2044...
- Seite 77 Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle Typen“ aktiviert werden, um in diesem Fall eine Byte-Variable einen Satz von acht separaten Ausgangsbits zuzuordnen. Die folgende Abbildung zeigt den gesamten Vorgang: Abb. 70: Auswahl von mehreren PDO gleichzeitig: Aktivierung von „Kontinuierlich“ und „Alle Typen“ EL2044 Version: 1.0...
- Seite 78 1. Zuerst müssen die benötigten Prozessdaten im Reiter „Prozessdaten“ in TwinCAT ausgewählt wer- den. 2. Anschließend muss der SPS Datentyp im Reiter „PLC“ über die Check-Box generiert werden. 3. Der Datentyp im Feld „Data Type“ kann dann über den „Copy“-Button kopiert werden. Version: 1.0 EL2044...
- Seite 79 6. Die Struktur im Reiter „PLC“ der Klemme muss dann mit der angelegten Instanz verknüpft werden. Abb. 74: Verknüpfung der Struktur 7. In der SPS können die Prozessdaten dann über die Struktur im Programmcode gelesen bzw. ge- schrieben werden. EL2044 Version: 1.0...
- Seite 80 Programm geladen werden?“ bekannt gemacht und ist mit “Ja” zu beantworten. Die Laufzeitumgebung ist bereit zum Programmstart mit Klick auf das Symbol , Taste „F5“ oder entsprechend auch über „PLC“ im Menü durch Auswahl von „Start“. Die gestartete Programmierumgebung zeigt sich mit einer Darstellung der Laufzeitwerte von einzelnen Variablen: Version: 1.0 EL2044...
-
Seite 81: Twincat Entwicklungsumgebung
◦ Datenanbindung an NT-Programme mittels offener Microsoft Standards (OLE, OCX, ActiveX, DCOM+, etc.). ◦ Einbettung von IEC 61131-3-Software-SPS, Software- NC und Software-CNC in Windows NT/2000/XP/Vista, Windows 7, NT/XP Embedded, CE ◦ Anbindung an alle gängigen Feldbusse ◦ Weiteres… Zusätzlich bietet: EL2044 Version: 1.0... -
Seite 82: Installation Twincat Realtime Treiber
In den folgenden Kapiteln wird dem Anwender die Inbetriebnahme der TwinCAT Entwicklungsumgebung auf einem PC System der Steuerung sowie die wichtigsten Funktionen einzelner Steuerungselemente erläutert. Bitte sehen Sie weitere Informationen zu TwinCAT 2 und TwinCAT 3 unter http://infosys.beckhoff.de/. 5.2.1 Installation TwinCAT Realtime Treiber Um einen Standard Ethernet Port einer IPC Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, ist... - Seite 83 TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“ geöffnet werden: Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnen Netzwerkschnittstelle (Windows Start → Systemsteuerung → Netzwerk) EL2044 Version: 1.0...
- Seite 84 Inbetriebnahme Abb. 81: Windows-Eigenschaften der Netzwerkschnittstelle Eine korrekte Einstellung des Treibers könnte wie folgt aussehen: Abb. 82: Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports Andere mögliche Einstellungen sind zu vermeiden: Version: 1.0 EL2044...
- Seite 85 Inbetriebnahme Abb. 83: Fehlerhafte Treiber-Einstellungen des Ethernet Ports EL2044 Version: 1.0...
- Seite 86 IP-Adresse für diesen Port zu vergeben und DHCP zu deaktivieren. Dadurch entfällt die Wartezeit, bis sich der DHCP-Client des Ethernet Ports eine Default-IP-Adresse zuteilt, weil er kei- ne Zuteilung eines DHCP-Servers erhält. Als Adressraum empfiehlt sich z. B. 192.168.x.x. Abb. 84: TCP/IP-Einstellung des Ethernet Ports Version: 1.0 EL2044...
-
Seite 87: Hinweise Esi-Gerätebeschreibung
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0010) beschreibt die Funktion des Gerätes. Die Revision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z. B. in der Dokumentation nicht anders angegeben. - Seite 88 Revision in die Konfiguration zulässt. Üblicherweise bringt eine neue/größere Revision auch neue Features mit. Wenn diese nicht genutzt werden sollen, kann ohne Bedenken mit der bisherigen Revision 1018 in der Konfiguration weitergearbeitet werden. Dies drückt auch die Beckhoff Kompatibili- tätsregel aus.
-
Seite 89: Onlinedescription Unter Twincat
(Spracheinstellungen des Betriebssystems beachten!) Diese Datei ist im gleichen Zuge wie die andere Datei zu löschen. Fehlerhafte ESI-Datei Liegt eine fehlerhafte ESI-Datei vor die vom System Manager nicht eingelesen werden kann, meldet dies der System Manager durch ein Hinweisfenster. EL2044 Version: 1.0... - Seite 90 Ursachen dafür können sein • Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei → prüfen Sie die Ihnen vorliegenden Schemata • Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden → Es ist der Hersteller der Datei zu kontaktieren Version: 1.0 EL2044...
-
Seite 91: Twincat Esi Updater
Inbetriebnahme 5.2.3 TwinCAT ESI Updater Ab TwinCAT 2.11 kann der System Manager bei Online-Zugang selbst nach aktuellen Beckhoff ESI-Dateien suchen: Abb. 91: Anwendung des ESI Updater (>=TwinCAT 2.11) Der Aufruf erfolgt unter: „Options“ → „Update EtherCAT Device Descriptions“. Auswahl bei TwinCAT 3: Abb. 92: Anwendung des ESI Updater (TwinCAT 3) Der ESI Updater ist eine bequeme Möglichkeit, die von den EtherCAT Herstellern bereitgestellten ESIs... -
Seite 92: Offline Konfigurationserstellung
Für eine EtherCAT I/O Anwendung mit EtherCAT Slaves ist der „EtherCAT“ Typ auszuwählen. „EtherCAT Automation Protocol via EL6601“ ist für den bisherigen Publisher/Subscriber-Dienst in Kombination mit einer EL6601/EL6614 Klemme auszuwählen. Abb. 94: Auswahl EtherCAT Anschluss (TwinCAT 2.11, TwinCAT 3) Diesem virtuellen Gerät ist dann ein realer Ethernet Port auf dem Laufzeitsystem zuzuordnen. Version: 1.0 EL2044... -
Seite 93: Auswahl Ethernet Port
Es können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der TwinCAT Re- altime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen werden. Siehe dazu die entsprechende Installationsseite [} 82]. Definieren von EtherCAT Slaves Durch Rechtsklick auf ein Gerät im Konfigurationsbaum können weitere Geräte angefügt werden. EL2044 Version: 1.0... - Seite 94 Das Suchfeld erleichtert das Auffinden eines bestimmten Gerätes (ab TwinCAT 2.11 bzw. TwinCAT 3). Abb. 98: Auswahldialog neues EtherCAT Gerät Standardmäßig wird nur der Name/Typ des Gerätes als Auswahlkriterium verwendet. Für eine gezielte Auswahl einer bestimmen Revision des Gerätes kann die Revision als „Extended Information“ eingeblendet werden. Version: 1.0 EL2044...
-
Seite 95: Geräte-Auswahl Nach Revision, Kompatibilität
Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden, z. B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neues EtherCAT Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzte Produktionsstand im Auswahldialog angezeigt. Sollen alle im System als ESI-Beschreibungen vorliegenden Revisionen eines Gerätes angezeigt werden, ist die Checkbox „Show Hidden Devices“... - Seite 96 Abb. 101: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 97: Online Konfigurationserstellung
Im Konfigurationsbaum bringt uns ein Rechtsklick auf den General-Punkt „I/O Devices“ zum Such-Dialog. Abb. 104: Scan Devices (links: TwinCAT 2; rechts: TwinCAT 3) Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zu finden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatisch gefunden werden. EL2044 Version: 1.0... -
Seite 98: Funktionsweise Online Scan
Beim Scan fragt der Master die Identity Informationen der EtherCAT Slaves aus dem Slave-EE- PROM ab. Es werden Name und Revision zur Typbestimmung herangezogen. Die entsprechenden Geräte werden dann in den hinterlegten ESI-Daten gesucht und in dem dort definierten Default-Zu- stand in den Konfigurationsbaum eingebaut. Abb. 107: Beispiel Default-Zustand Version: 1.0 EL2044... -
Seite 99: Slave-Scan In Der Praxis Im Serienmaschinenbau
Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen mit Klemmen EL2521-0025-1018 angelegt. Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019. - Seite 100 Die Konfiguration wird aufgebaut und kann danach gleich in den Online-Zustand (OPERATIONAL) versetzt werden. Abb. 113: Abfrage Config/FreeRun (links: TwinCAT 2; rechts TwinCAT 3) Im Config/FreeRun-Mode wechselt die System Manager Anzeige blau/rot und das EtherCAT Gerät wird auch ohne aktive Task (NC, PLC) mit der Freilauf-Zykluszeit von 4 ms (Standardeinstellung) betrieben. Version: 1.0 EL2044...
- Seite 101 In diesem Fall bietet der System Manager an, die im Gerät eventuell vorliegende ESI auszulesen. Lesen Sie dazu das Kapitel „Hinweise zu ESI/XML“. • Teilnehmer werden nicht richtig erkannt Ursachen können sein ◦ fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf ◦ Slave hat ungültige Gerätebeschreibung EL2044 Version: 1.0...
-
Seite 102: Veränderung Der Konfiguration Nach Vergleich
Bei diesem Scan werden z. Z. (TwinCAT 2.11 bzw. 3.1) nur die Geräteeigenschaften Vendor (Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder „Copy“ sollte nur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s. o.) nur mit Bedacht vorgenommen werden. Das Gerät wird dann in der Konfigu- ration gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten... - Seite 103 Geräte die Funktionen der Vorgänger-Geräte unterstützen sollen. Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich nicht möglich. Eventuell unterstützt das vorgefundene Gerät nicht alle Funktionen, die der Master von ihm aufgrund der höheren Revision erwartet. EL2044 Version: 1.0...
- Seite 104 Abb. 120: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 105: Ethercat Teilnehmerkonfiguration
Karteireiter „Allgemein“, „EtherCAT“, „Prozessdaten“ und „Online“ zur Auswahl. Einige Klemmen, wie etwa die EL6695 bieten spezielle Funktionen über einen Karteireiter mit der eigenen Klemmenbezeichnung an, also „EL6695“ in diesem Fall. Ebenfalls wird ein spezieller Karteireiter „Settings“ von Klemmen mit umfangreichen Einstellmöglichkeiten angeboten (z. B. EL3751). EL2044 Version: 1.0... - Seite 106 Hier können Sie einen Kommentar (z. B. zum Anlagenteil) hinzufügen. Disabled Hier können Sie das EtherCAT-Gerät deaktivieren. Symbole erzeugen Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf diesen EtherCAT-Slave zugreifen. Karteireiter „EtherCAT“ Abb. 126: Karteireiter „EtherCAT“ Version: 1.0 EL2044...
- Seite 107 Prozessdaten (Größe in Bit/Bytes, Quellort, Übertragungsart) er von oder zu diesem Slave übermitteln möchte. Eine falsche Konfiguration kann einen erfolgreichen Start des Slaves verhindern. Für Beckhoff EtherCAT Slaves EL, ES, EM, EJ und EP gilt im Allgemeinen: EL2044 Version: 1.0...
- Seite 108 Nach einem Aktivieren der Konfiguration und TwinCAT-Neustart (bzw. Neustart des EtherCAT Masters) sind die neuen Prozessdaten aktiv. • E: wenn ein Slave dies unterstützt, können auch Input- und Output-PDO gleichzeitig durch Anwahl eines so genannten PDO-Satzes („Predefined PDO-settings“) verändert werden. Abb. 128: Konfigurieren der Prozessdaten Version: 1.0 EL2044...
-
Seite 109: Manuelle Veränderung Der Prozessdaten
Diese Schaltfläche bewegt den markierten Request in der Liste um eine Position nach unten. Diese Schaltfläche fügt einen neuen Mailbox-Download-Request, der währen des Startups gesendet werden soll hinzu. Delete Diese Schaltfläche löscht den markierten Eintrag. Edit Diese Schaltfläche editiert einen existierenden Request. EL2044 Version: 1.0... - Seite 110 Karteireiter CoE - Online angezeigt. Dieser Dialog listet den Inhalt des Objektverzeichnisses des Slaves auf (SDO-Upload) und erlaubt dem Anwender den Inhalt eines Objekts dieses Verzeichnisses zu ändern. Details zu den Objekten der einzelnen EtherCAT-Geräte finden Sie in den gerätespezifischen Objektbeschreibungen. Abb. 130: Karteireiter „CoE - Online“ Version: 1.0 EL2044...
- Seite 111 Slave hochgeladen. In der untenstehenden Liste können Sie festlegen welche Objekt-Typen hochgeladen werden sollen. Offline - über EDS-Datei Wenn dieses Optionsfeld angewählt ist, wird die Liste der im Objektverzeichnis enthaltenen Objekte aus einer EDS-Datei gelesen, die der Anwender bereitstellt. EL2044 Version: 1.0...
- Seite 112 No Carrier / Closed Kein Carrier-Signal am Port vorhanden und der Port ist geschlossen. Carrier / Open Carrier-Signal ist am Port vorhanden und der Port ist offen. Carrier / Closed Carrier-Signal ist am Port vorhanden, der Port ist aber geschlossen. Version: 1.0 EL2044...
- Seite 113 • DC-Synchron (Input based) • DC-Synchron Erweiterte Einstellungen… Erweiterte Einstellungen für die Nachregelung der echtzeitbestimmende TwinCAT-Uhr Detaillierte Informationen zu Distributed Clocks sind unter http://infosys.beckhoff.de angegeben: Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Distributed Clocks 5.2.7.1 Detaillierte Beschreibung Karteireiter „Prozessdaten“ Sync-Manager Listet die Konfiguration der Sync-Manager (SM) auf.
-
Seite 114: Aktivierung Der Pdo-Zuordnung
Kommandos können in auf dem Karteireiter Startup [} 109] betrachtet werden. PDO-Konfiguration Falls dieses Kontrollkästchen angewählt ist, wird die Konfiguration des jeweiligen PDOs (wie sie in der PDO- Liste und der Anzeige PDO-Inhalt angezeigt wird) zum EtherCAT-Slave herunter geladen. Version: 1.0 EL2044... -
Seite 115: Allgemeine Inbetriebnahmehinweise Des Ethercat Slaves
Diese Diagnose ist für alle Slaves gleich. als auch über • kanal-typische Funktionsdiagnose (geräteabhängig) Siehe entsprechende Gerätedokumentation Die Farbgebung in Abb. Auswahl an Diagnoseinformationen eines EtherCAT Slave entspricht auch den Variablenfarben im System Manager, siehe Abb. Grundlegende EtherCAT Slave Diagnose in der PLC. EL2044 Version: 1.0... - Seite 116 Variablen über ADS sinnvoll. In Abb. Grundlegende EtherCAT Slave Diagnose in der PLC ist eine Beispielimplementation einer grundlegenden EtherCAT Slave Diagnose zu sehen. Dabei wird eine Beckhoff EL3102 (2 kanalige analoge Eingangsklemme) verwendet, da sie sowohl über slave-typische Kommunikationsdiagnose als auch über kanal-spezifische Funktionsdiagnose verfügt.
-
Seite 117: Diagnoseinformationen
Das CoE-Parameterverzeichnis (CanOpen-over-EtherCAT) dient der Verwaltung von Einstellwerten des jeweiligen Slaves. Bei der Inbetriebnahme eines komplexeren EtherCAT Slaves sind unter Umständen hier Veränderungen vorzunehmen. Zugänglich ist es über den TwinCAT System Manager, s. Abb. EL3102, CoE- Verzeichnis: EL2044 Version: 1.0... - Seite 118 • Es ist vom Anwender die StartUp-Liste mit den Änderungen zu pflegen. Inbetriebnahmehilfe im TwinCAT System Manager In einem fortschreitenden Prozess werden für EL/EP-EtherCAT Geräte Inbetriebnahmeoberflächen eingeführt. Diese sind in TwinCAT System Managern ab TwinCAT 2.11R2 verfügbar. Sie werden über entsprechend erweiterte ESI-Konfigurationsdateien in den System Manager integriert. Version: 1.0 EL2044...
- Seite 119 (DC), PDO, CoE) definiert sind. Siehe dazu auch Kapitel "Grundlagen der Kommunikation, EtherCAT State Machine [} 35]. Der Hochlauf kann je nach Konfigurationsaufwand und Gesamtkonfiguration bis zu einigen Sekunden dauern. Auch der EtherCAT Master selbst muss beim Start diese Routinen durchlaufen, bis er in jedem Fall den Zielzustand OP erreicht. EL2044 Version: 1.0...
- Seite 120 • EtherCAT Master: OP • Slaves: OP Diese Einstellung gilt für alle Slaves zugleich. Abb. 138: Default Verhalten System Manager Zusätzlich kann im Dialog „Erweiterte Einstellung“ beim jeweiligen Slave der Zielzustand eingestellt werden, auch dieser ist standardmäßig OP. Version: 1.0 EL2044...
- Seite 121 Dann ist es in der PLC-Anwendung sinnvoll, die PLC-Funktionsblöcke aus der standardmäßig vorhandenen TcEtherCAT.lib zu nutzen und z. B. mit FB_EcSetMasterState die States kontrolliert anzufahren. Die Einstellungen im EtherCAT Master sind dann sinnvollerweise für Master und Slave auf INIT zu setzen. Abb. 140: PLC-Bausteine EL2044 Version: 1.0...
- Seite 122 Ab TwinCAT 2.11 wird bei der Aktivierung einer solchen Konfiguration eine Warnmeldung „E-Bus Power of Terminal...“ im Logger-Fenster ausgegeben: Abb. 142: Warnmeldung E-Bus-Überschreitung HINWEIS Achtung! Fehlfunktion möglich! Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepoten- tial erfolgen! Version: 1.0 EL2044...
-
Seite 123: Anhang
Stand. Überprüfen Sie auf der Beckhoff Webseite, ob eine aktuellere Dokumentation vorliegt. Firmware Update EL/ES/ELM/EM/EPxxxx Dieses Kapitel beschreibt das Geräte-Update für Beckhoff EtherCAT Slaves der Serien EL/ES, ELM, EM, EK und EP. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden. -
Seite 124: Gerätebeschreibung Esi-File/Xml
Die Gerätebeschreibung ESI wird auf dem Slave lokal gespeichert und beim Start geladen. Jede Gerätebeschreibung hat eine eindeutige Kennung aus Slave-Name (9-stellig) und Revision-Nummer (4- stellig). Jeder im System Manager konfigurierte Slave zeigt seine Kennung im EtherCAT-Reiter: Version: 1.0 EL2044... -
Seite 125: Update Von Xml/Esi-Beschreibung
Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder sogar zur endgültigen Außerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit dem Beckhoff Support ausgeführt werden. Anzeige der Slave-Kennung ESI Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibung festzustellen, ist im TwinCAT-Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:... - Seite 126 Die ESI/EEPROM-Kennung kann unter TwinCAT wie folgt aktualisiert werden: • Es muss eine einwandfreie EtherCAT-Kommunikation zum Slave hergestellt werden • Der State des Slave ist unerheblich • Rechtsklick auf den Slave in der Online-Anzeige führt zum Dialog EEPROM Update, Abb. EEPROM Update Version: 1.0 EL2044...
-
Seite 127: Änderung Erst Nach Neustart Wirksam
PowerOn gelesen. Deshalb ist ein kurzes Abschalten des EtherCAT Slave nö- tig, damit die Änderung wirksam wird. 6.3.2 Erläuterungen zur Firmware Versionsbestimmung der Firmware Versionsbestimmung nach Laseraufdruck Auf einem Beckhoff EtherCAT Slave ist eine Seriennummer aufgelasert. Der Aufbau der Seriennummer lautet: KK YY FF HH EL2044 Version: 1.0... -
Seite 128: Coe-Online Und Offline-Coe
• offline: in der EtherCAT Slave Information ESI/XML kann der Default-Inhalt des CoE enthalten sein. Dieses CoE-Verzeichnis kann nur angezeigt werden, wenn es in der ESI (z. B. „Beckhoff EL5xxx.xml“) enthalten ist. Die Umschaltung zwischen beiden Ansichten kann über den Button Advanced vorgenommen wer- den. -
Seite 129: Update Controller-Firmware *.Efw
Firmware Update. Abb. 150: Firmware Update Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen. Gültig für TwinCAT 2 und 3 als EtherCAT Master. • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1ms schalten (default sind im ConfigMode 4 ms). -
Seite 130: Fpga-Firmware *.Rbf
Der TwinCAT System-Manager zeigt die Version der FPGA-Firmware an. Klicken Sie hierzu auf die Ethernet-Karte Ihres EtherCAT-Stranges (im Beispiel Gerät 2) und wählen Sie den Karteireiter Online. Die Spalte Reg:0002 zeigt die Firmware-Version der einzelnen EtherCAT-Geräte in hexadezimaler und dezimaler Darstellung an. Version: 1.0 EL2044... - Seite 131 Abb. 152: Kontextmenu Eigenschaften (Properties) In dem folgenden Dialog Advanced Settings können Sie festlegen, welche Spalten angezeigt werden sollen. Markieren Sie dort unter Diagnose/Online Anzeige das Kontrollkästchen vor '0002 ETxxxx Build' um die Anzeige der FPGA-Firmware-Version zu aktivieren. EL2044 Version: 1.0...
- Seite 132 Ältere Firmware-Stände können nur vom Hersteller aktualisiert werden! Update eines EtherCAT-Geräts Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen: • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1 ms schalten (default sind im ConfigMode 4 ms).
- Seite 133 • Wählen Sie im TwinCAT System-Manager die Klemme an, deren FPGA-Firmware Sie aktualisieren möchten (im Beispiel: Klemme 5: EL5001) und klicken Sie auf dem Karteireiter EtherCAT auf die Schaltfläche Weitere Einstellungen: • Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf die Schaltfläche Schreibe FPGA: EL2044 Version: 1.0...
-
Seite 134: Gleichzeitiges Update Mehrerer Ethercat-Geräte
Die Firmware von mehreren Geräten kann gleichzeitig aktualisiert werden, ebenso wie die ESI- Beschreibung. Voraussetzung hierfür ist, dass für diese Geräte die gleiche Firmware-Datei/ESI gilt. Abb. 154: Mehrfache Selektion und FW-Update Wählen Sie dazu die betreffenden Slaves aus und führen Sie das Firmware-Update im BOOTSTRAP Modus wie o. a. aus. Version: 1.0 EL2044... -
Seite 135: Firmware Kompatibilität - Passive Klemmen
Wert 1684107116 oder alternativ im Feld Hex den Wert 0x64616F6C ein und bestätigen Sie mit OK (Abb. Eingabe des Restore-Wertes im Set Value Dialog). Alle Backup-Objekte werden so in den Auslieferungszustand zurückgesetzt. Abb. 156: Eingabe des Restore-Wertes im Set Value Dialog EL2044 Version: 1.0... -
Seite 136: Support Und Service
Wert umstellen: Dezimalwert: 1819238756, Hexadezimalwert: 0x6C6F6164. Eine falsche Eingabe des Restore-Wertes zeigt keine Wirkung! Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. - Seite 137 Abb. 9 Abschalten induktiver Lasten....................... Abb. 10 EL2044 - Reiter „Prozessdaten“ ....................Abb. 11 EL2044 Online - Darstellung der Prozessdaten und Strukturinhalte im System Manager ..Abb. 12 EL2044 Reiter „Prozessdaten“ ....................Abb. 13 EL2044 - CoE - Verzeichnis ......................
- Seite 138 Abb. 84 TCP/IP-Einstellung des Ethernet Ports ..................Abb. 85 Gerätebezeichnung: Struktur....................... Abb. 86 Hinweisfenster OnlineDescription (TwinCAT 2)................Abb. 87 Hinweisfenster OnlineDescription (TwinCAT 3)................Abb. 88 Vom System Manager angelegt OnlineDescription.xml .............. Abb. 89 Kennzeichnung einer online erfassten ESI am Beispiel EL2521..........Version: 1.0 EL2044...
- Seite 139 Abb. 127 Karteireiter „Prozessdaten“......................107 Abb. 128 Konfigurieren der Prozessdaten ....................108 Abb. 129 Karteireiter „Startup“ ........................109 Abb. 130 Karteireiter „CoE - Online“ ......................110 Abb. 131 Dialog „Advanced settings“......................111 Abb. 132 Karteireiter „Online“ ........................112 EL2044 Version: 1.0...
- Seite 140 Abb. 152 Kontextmenu Eigenschaften (Properties) ..................131 Abb. 153 Dialog Advanced settings ......................132 Abb. 154 Mehrfache Selektion und FW-Update ..................134 Abb. 155 Auswahl des PDO Restore default parameters ................135 Abb. 156 Eingabe des Restore-Wertes im Set Value Dialog ..............135 Version: 1.0 EL2044...
-
Seite 142: Mehr Informationen
Mehr Informationen: www.beckhoff.de/german/ethercat/el2044.htm Beckhoff Automation GmbH & Co. KG Hülshorstweg 20 33415 Verl Deutschland Telefon: +49 5246 9630 info@beckhoff.de www.beckhoff.de...