Beckhoff EP1 serie Dokumentation
Ethercat-box-module mit digitalen eingängen
Inhaltsverzeichnis
Quicklinks
Kapitel
Inhaltsverzeichnis

Verwandte Anleitungen für Beckhoff EP1 serie












Inhaltszusammenfassung für Beckhoff EP1 serie
- Seite 1 Dokumentation EP1xxx EtherCAT-Box-Module mit digitalen Eingängen Version: Datum: 15.04.2020...
-
Seite 3: Inhaltsverzeichnis
Inhaltsverzeichnis Inhaltsverzeichnis 1 Vorwort ............................... 5 Hinweise zur Dokumentation ...................... 5 Sicherheitshinweise ........................... 6 Ausgabestände der Dokumentation .................... 7 2 EtherCAT Box - Einführung ........................ 9 3 Produktübersicht ............................. 11 Modulübersicht .......................... 11 EP1008, EP1018 .......................... 12 3.2.1 EP1008, EP1018 - Einführung.................. 12 3.2.2 EP1008, EP1018 - Technische Daten ................ 14 3.2.3 EP1008-00xx - Prozessabbild .................. - Seite 4 6.4.2 Standardobjekte (0x1000-0x1FFF).................. 88 6.4.3 Profilspezifische Objekte (0x6000-0xFFFF) .............. 94 7 Anhang .............................. 97 Allgemeine Betriebsbedingungen .................... 97 EtherCAT Box- / EtherCAT-P-Box - Zubehör .................. 98 Versionsidentifikation von EtherCAT-Geräten ................. 99 7.3.1 Beckhoff Identification Code (BIC)................. 103 Support und Service ........................ 105 Version: 2.7 EP1xxx...
-
Seite 5: Vorwort
Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. -
Seite 6: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 7: Ausgabestände Der Dokumentation
Vorwort Ausgabestände der Dokumentation Version Änderungen • EP1809-0042 hinzugefügt • EP1816-0003 hinzugefügt • EP1819-0021 hinzugefügt • EP1859-0042 hinzugefügt • Signalanschluss von EP1816-3008 korrigiert • Schutzgehäuse BG2000-0010 ergänzt • EP1098-0001 Einführung: 2-Leiter-Anschluss korrigiert • EP1816-1008 hinzugefügt 2.5.0 • EP1816-3008 hinzugefügt 2.4.1 •... - Seite 8 Vorwort Firm- und Hardware-Stände Diese Dokumentation bezieht sich auf den zum Zeitpunkt ihrer Erstellung gültigen Firm- und Hardware- Stand. Die Eigenschaften der Module werden stetig weiterentwickelt und verbessert. Module älteren Fertigungsstandes können nicht die gleichen Eigenschaften haben, wie Module neuen Standes. Bestehende Eigenschaften bleiben jedoch erhalten und werden nicht geändert, so dass ältere Module immer durch neue ersetzt werden können.
-
Seite 9: Ethercat Box - Einführung
EtherCAT Box - Einführung EtherCAT Box - Einführung Das EtherCAT-System wird durch die EtherCAT-Box-Module in Schutzart IP67 erweitert. Durch das integrierte EtherCAT-Interface sind die Module ohne eine zusätzliche Kopplerbox direkt an ein EtherCAT- Netzwerk anschließbar. Die hohe EtherCAT-Performance bleibt also bis in jedes Modul erhalten. Die außerordentlich geringen Abmessungen von nur 126 x 30 x 26,5 mm (H x B x T) sind identisch zu denen der Feldbus Box Erweiterungsmodule. -
Seite 10: Abb. 2 Ethercat Box Mit M8-Anschlüssen Für Sensor/Aktoren
Eine detaillierte Beschreibung des EtherCAT-Systems finden Sie in der System Basis-Dokumentati- on zu EtherCAT, die auf unserer Homepage (www.beckhoff.de) unter Downloads zur Verfügung steht. XML-Dateien XML -Dateien (XML Device Description Files) zu EtherCAT-Modulen von Beckhoff finden Sie unter auf unserer Homepage (www.beckhoff.de) unter Downloads im Bereich Konfigurations-Dateien. Version: 2.7 EP1xxx... -
Seite 11: Produktübersicht
Produktübersicht Produktübersicht Modulübersicht Modul Anzahl Filter Signal- EtherCAT- Kommentar Eingänge Anschluss Anschluss 3,0 ms 8x M8 EP1008-0001 [} 12] 3,0 ms 4x M12 EP1008-0002 [} 12] 3,0 ms 8x M12 EP1008-0022 [} 12] 10 µs 8x M8 EP1018-0001 [} 12] 10 µs 4x M12 EP1018-0002 [} 12] 10 µs 8x M8 negativ schaltend EP1098-0001 [} 16] 3 ID-... -
Seite 12: Ep1008, Ep1018
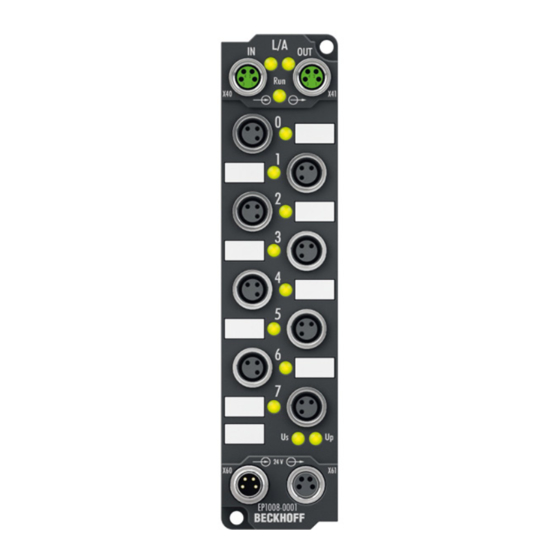
Produktübersicht EP1008, EP1018 3.2.1 EP1008, EP1018 - Einführung Abb. 4: EP1008-0001, EP1008-0002, EP1018-0001, EP1018-0002 Abb. 5: EP1008-0022 Version: 2.7 EP1xxx... - Seite 13 Produktübersicht 8 digitale Eingänge 24 V Die EtherCAT-Box-Module EP1008 und EP1018 mit digitalen Eingängen erfassen binäre Steuersignale aus der Prozessebene und übertragen sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt wahlweise über M8- (EP1008-0001, EP1018-0001) oder M12-Steckverbinder (EP1008-0002, EP1008-0022, EP1018-0002). Die Varianten unterscheiden sich durch unterschiedlich schnelle Eingangsfilter.
-
Seite 14: Ep1008, Ep1018 - Technische Daten
Produktübersicht 3.2.2 EP1008, EP1018 - Technische Daten Technische Daten EP1008-0001 EP1008-0002 EP1008-0022 EP1018-0001 EP1018-0002 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Anzahl Eingänge Anschluss Eingänge Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter 3,0 ms 3,0 ms 3,0 ms 10 µs 10 µs Signalspannung "0" -3...+5 V (EN 61131-2, Typ 3) Signalspannung "1"... -
Seite 15: Ep1008-00Xx - Prozessabbild
Produktübersicht 3.2.3 EP1008-00xx - Prozessabbild Channel 1 bis Channel 8 Unter Channel 1 bis Channel 8 finden Sie die 8 digitalen Eingänge des Moduls (hier als Beispiel das EP1008-0001). Abb. 6: EP1008-00xx, Prozessabbild EP1xxx Version: 2.7... -
Seite 16: Ep1098-0001
Produktübersicht EP1098-0001 3.3.1 EP1098 - Einführung Abb. 7: EP1098-0001 8 digitale Eingänge, 24 V , negativ schaltend Die EtherCAT Box Module EP1098-0001 und EP1098-0002 mit digitalen Eingängen erfassen binäre Steuersignale aus der Prozessebene und übertragen sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt über M8- (EP1098-0001) oder M12-Steckverbinder (EP1098-0002) Die Sensoren werden aus der Steuerspannung Us versorgt. -
Seite 17: Ep1098-0001 - Technische Daten
Produktübersicht 3.3.2 EP1098-0001 - Technische Daten Technische Daten EP1098-0001 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Anzahl Eingänge 8 (negativ schaltend) Anschluss Eingänge Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter 10 µs Signalspannung "0" 11…30 V Signalspannung "1" 0…7 V Eingangsstrom typisch 2,5 mA (EN 61131-2, Typ 3) Versorgung der Modulelektronik aus der Steuerspannung Us Stromaufnahme der Modulelektronik... -
Seite 18: Ep1098-0001 - Prozessabbild
Produktübersicht 3.3.3 EP1098-0001 - Prozessabbild Channel 1 bis Channel 8 Unter Channel 1 bis Channel 8 finden Sie die 8 digitalen Eingänge des Moduls (hier als Beispiel das EP1098-0001). Abb. 8: EP1098-0001, Prozessabbild Version: 2.7 EP1xxx... -
Seite 19: Ep1111-0000
Produktübersicht EP1111-0000 3.4.1 EP1111-0000 - Einführung Abb. 9: EP1111-0000 EtherCAT Box mit ID-Switch Die EtherCAT Box EP1111-0000 verfügt über drei dezimale ID-Switches, mit denen Gruppen von EtherCAT- Komponenten eine ID zugeordnet werden kann. Diese Gruppe kann an beliebiger Stelle im EtherCAT- Netzwerk vorhanden sein, wodurch variable Topologien einfach zu realisieren sind. -
Seite 20: Ep1111-0000 - Technische Daten
Produktübersicht 3.4.2 EP1111-0000 - Technische Daten Technische Daten EP1111-0000 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Aufgabe im EtherCAT-System Identifizierung beliebiger EtherCAT-Gruppen im EtherCAT- Netzwerk Anzahl ID-Switches Stellungen pro ID-Switch Anzahl unterschiedlicher IDs Versorgung der Modulelektronik aus der Steuerspannung Us Stromaufnahme der Modulelektronik typisch 120 mA Anschluss Spannungsversorgung... -
Seite 21: Ep1258-000X
Produktübersicht EP1258-000x 3.5.1 EP1258-000x - Einführung Abb. 11: EP1258-0001, EP1258-0002 8 digitale Eingänge 24 V (zwei Kanäle mit Time-Stamp) Die EtherCAT Box EP1258 mit digitalen Eingängen erfasst schnelle binäre Steuersignale aus der Prozessebene und überträgt sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt wahlweise über M8- (EP1258-0001) oder M12-Steckverbinder (EP1258-0002). -
Seite 22: Ep1258-000X - Technische Daten
Produktübersicht 3.5.2 EP1258-000x - Technische Daten Technische Daten EP1258-0001 EP1258-0002 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Anzahl Eingänge Anschluss Eingänge Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter 10 µs Signalspannung "0" -3...+5 V (ähnlich EN 61131-2, Typ 3) Signalspannung "1" +11...+30 V (ähnlich EN 61131-2, Typ 3) Eingangsstrom typisch 3 mA (ähnlich EN 61131-2, Typ 3) -
Seite 23: Ep1258-0001 - Prozessabbild
Produktübersicht 3.5.3 EP1258-0001 - Prozessabbild Channel 1 bis Channel 8 Unter Channel 1 bis Channel 8 finden Sie die 8 digitalen Eingänge des Moduls (hier als Beispiel das EP1258-0001). Abb. 12: EP1258-0001, Prozessabbild EP1xxx Version: 2.7... -
Seite 24: Ep1809, Ep1819
Produktübersicht EP1809, EP1819 3.6.1 EP1809-0021, EP1819-0021 - Einführung Abb. 13: EP1809-0021, EP1819-0021 16 digitale Eingänge 24 V Die EtherCAT Module EP1809-0021 und EP1819-0021 mit digitalen Eingängen erfassen binäre Steuersignale aus der Prozessebene und übertragen sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt über M8-Steckverbinder. Die Sensoren werden aus der Steuerspannung U versorgt. -
Seite 25: Ep1809-0022, Ep1819-0022 - Einführung
Produktübersicht 3.6.2 EP1809-0022, EP1819-0022 - Einführung Abb. 14: EP1809-0022, EP1819-0022 16 digitale Eingänge 24 V Die Module EP1809-0022, EP1819-0022 mit digitalen Eingängen erfassen binäre Steuersignale aus der Prozessebene und übertragen sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt über M12-Steckverbinder. Die Varianten unterscheiden sich durch unterschiedlich schnelle Eingangsfilter. -
Seite 26: Ep1809, Ep1819 - Technische Daten
Produktübersicht 3.6.3 EP1809, EP1819 - Technische Daten Technische Daten EP1809-0021 EP1809-0022 EP1819-0021 EP1819-0022 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Anzahl Eingänge Anschluss Eingänge Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter 3 ms 3 ms 10 µs 10 µs Signalspannung "0" -3...+5 V (ähnlich EN 61131-2, Typ 3) Signalspannung "1"... -
Seite 27: Ep1809-0021 - Prozessabbild
Produktübersicht 3.6.4 EP1809-0021 - Prozessabbild Channel 1 bis Channel 16 Unter Channel 1 bis Channel 16 finden Sie die 16 digitalen Eingänge des Moduls (hier als Beispiel das EP1809-0021). Abb. 15: EP1809-0021, Prozessabbild EP1xxx Version: 2.7... -
Seite 28: Ep1809-0042
Produktübersicht EP1809-0042 3.7.1 EP1809-0042 - Einführung Abb. 16: EP1809-0042 EP1809-0042 | 16-Kanal-Digital-Eingang 24 V DC, 3,0 ms Die EtherCAT Box EP1809-0042 mit digitalen Eingängen erfasst binäre Steuersignale aus der Prozessebene und überträgt sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt über schraubbare M12-Steckverbinder. -
Seite 29: Ep1809-0042 - Technische Daten
Produktübersicht 3.7.2 EP1809-0042 - Technische Daten Alle Werte sind typische Werte über den gesamten Temperaturbereich, wenn nicht anders angegeben. Technische Daten EP1809-0042 Feldbus EtherCAT Feldbusanschluss 2x M12 Buchse, D-codiert, 4-polig, grün Potenzialtrennung 500 V (Feldbus/IO) Anzahl Eingänge Anschluss Eingänge 8x M12-Buchse Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter... -
Seite 30: Ep1809-0042 - Prozessabbild
Produktübersicht 3.7.3 EP1809-0042 – Prozessabbild Im Prozessabbild befindet sich für jeden digitalen Eingang ein Prozessdatenobjekt. Die Bezeichnung jedes Prozessdatenobjekts beinhaltet den Namen der Buchse und die Pin-Nummer des entsprechenden digitalen Eingangs. Abb. 17: EP1809-0042 Prozessabbild Version: 2.7 EP1xxx... -
Seite 31: Ep1816-0003
Produktübersicht EP1816-0003 3.8.1 EP1816-0003 - Einführung Abb. 18: EP1816-0003 EP1816-0003 | 16-Kanal-Digital-Eingang 24 V DC Die EtherCAT Box EP1816-0003 mit digitalen Eingängen erfasst binäre Steuersignale aus der Prozessebene und überträgt sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt. Der Signalanschluss erfolgt über Steckverbinder mit Federkrafttechnik, optional erhältlich in 1- und 3-poliger Ausführung. -
Seite 32: Ep1816-0003 - Technische Daten
Produktübersicht 3.8.2 EP1816-0003 - Technische Daten Technische Daten EP1816-0003 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse, 4-polig, grün Distributed Cocks Anzahl Eingänge Anschluss Eingänge 2x Steckbare Federkraftklemme ZS2001 (nicht im Lieferumfang enthalten) Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter 10 µs Signalspannung "0" -3...+5 V (EN 61131-2, Typ 3) Signalspannung "1"... -
Seite 33: Ep1816-0003 - Prozessabbild
Produktübersicht 3.8.3 EP1816-0003 - Prozessabbild Abb. 19: EP1816-0003 Prozessabbild DIG Inputs Channel n • Input x Digitale Eingänge. • Sync error Dieses Bit ist nur im „Distributed Clocks“ - Betrieb relevant. Es ist TRUE, wenn in dem abgelaufenen EtherCAT-Zyklus ein Synchronisationsfehler aufgetreten ist. -
Seite 34: Ep1816-X008
Produktübersicht EP1816-x008 3.9.1 EP1816-x008 - Einführung Abb. 20: EP1816-x008 EP1816-x008 | 16-Kanal-Digital-Eingang Die EtherCAT Box EP1816-x008 mit 16 digitalen Eingängen erfasst binäre Steuersignale aus der Prozessebene und überträgt sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt, der Signalanschluss erfolgt über eine 25-polige D-Sub-Buchse. Die Sensoren werden aus der Steuerspannung U versorgt. -
Seite 35: Ep1816-X008 - Technische Daten
Produktübersicht 3.9.2 EP1816-x008 - Technische Daten Technische Daten EP1816-0008 EP1816-1008 EP1816-3008 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Anzahl Eingänge Anschluss Eingänge 25-polige D-Sub-Buchse Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter 10 µs Signalspannung "0" -3...+5 V (EN 61131-2, Typ 3) Signalspannung "1" +11...+30 V (EN 61131-2, Typ 3) Eingangsstrom typisch 3 mA (EN 61131-2, Typ 3) Minimale Zykluszeit... -
Seite 36: Ep1816-0008 - Prozessabbild
Produktübersicht 3.9.3 EP1816-0008 - Prozessabbild Abb. 21: EP1816-0008 Prozessabbild DIG Inputs Channel 1 Unter DIG Inputs Channel 1 finden Sie die ersten 8 digitalen Eingänge des Moduls. Abb. 22: EP1816-0008 Prozessabbild, DIG Inputs Channel 1 DIG Inputs Channel 2 Unter DIG Inputs Channel 2 finden Sie die zweiten 8 digitalen Eingänge des Moduls. Abb. 23: EP1816-0008 Prozessabbild, DIG Inputs Channel 2 Version: 2.7 EP1xxx... -
Seite 37: Ep1816-1008 - Prozessabbild
Produktübersicht 3.9.4 EP1816-1008 – Prozessabbild Abb. 24: EP1816-1008 Prozessabbild DIG Inputs Channel 1 Unter DIG Inputs Channel 1 finden Sie die ersten 8 digitalen Eingänge des Moduls. Abb. 25: EP1816-1008 Prozessabbild, DIG Inputs Channel 1 DIG Inputs Channel 2 Unter DIG Inputs Channel 2 finden Sie die zweiten 8 digitalen Eingänge des Moduls. Abb. 26: EP1816-1008 Prozessabbild, DIG Inputs Channel 2 DIG Inputs Device Unter DIG Inputs Device finden Sie die Status-Bits. -
Seite 38: Ep1816-3008 - Prozessabbild
Produktübersicht 3.9.5 EP1816-3008 - Prozessabbild Abb. 28: EP1816-3008 Prozessabbild DIG Inputs Channel 1 Unter DIG Inputs Channel 1 finden Sie die ersten 8 digitalen Eingänge des Moduls. Abb. 29: EP1816-3008 Prozessabbild, DIG Inputs Channel 1 DIG Inputs Channel 2 Unter DIG Inputs Channel 2 finden Sie die zweiten 8 digitalen Eingänge des Moduls. Abb. 30: EP1816-3008 Prozessabbild, DIG Inputs Channel 2 Version: 2.7 EP1xxx... -
Seite 39: Abb. 31 Ep1816-3008 Prozessabbild, Dig Inputs Device
Produktübersicht DIG Inputs Device Unter DIG Inputs Device finden Sie die Status-Bits. Abb. 31: EP1816-3008 Prozessabbild, DIG Inputs Device AI Inputs Channel 1 bis 6 Abb. 32: EP1816-3008 Prozessabbild, AI Inputs Unter AI Inputs Channel finden Sie die Daten der beiden Beschleunigungssensoren • Status Error: ein Fehler mit der Kommunikation des Beschleunigungssensor ist aufgetreten •... -
Seite 40: Ep1859-0042
Produktübersicht 3.10 EP1859-0042 3.10.1 EP1859-0042 - Einführung Abb. 33: EP1859-0042 8 x Digital-Eingang + 8 x Digital-Ausgang Die EtherCAT Box EP1859-0042 hat acht digitale Eingänge (vier M12-Buchsen links) und acht digitale Ausgänge (vier M12-Buchsen rechts). Die Eingänge haben einen Filter von 3,0 ms. Die Ausgänge verarbeiten Lastströme bis 0,5 A, sind kurzschlussfest und verpolungsgeschützt. -
Seite 41: Ep1859-0042 - Technische Daten
Produktübersicht 3.10.2 EP1859-0042 - Technische Daten Alle Werte sind typische Werte über den gesamten Temperaturbereich, wenn nicht anders angegeben. Technische Daten EP1859-0042 Feldbus EtherCAT Feldbusanschluss 2x M12 Buchse, D-codiert, 4-polig, grün Potenzialtrennung 500 V (Feldbus/IO) Anzahl Eingänge Anschluss Eingänge 4x M12-Buchse: X01, X02, X03, X04 Nennspannung Eingänge 24 V (-15%/+20%) -
Seite 42: Ep1859-0042 - Prozessabbild
Produktübersicht 3.10.3 EP1859-0042 – Prozessabbild Im Prozessabbild befindet sich für jeden digitalen Eingang ein Prozessdatenobjekt. Die Bezeichnung jedes Prozessdatenobjekts beinhaltet den Namen der Buchse und die Pin-Nummer des entsprechenden digitalen Eingangs. Abb. 34: EP1859-0042 Prozessabbild Version: 2.7 EP1xxx... -
Seite 43: Montage Und Anschluss
Montage und Anschluss Montage und Anschluss Montage 4.1.1 Abmessungen EPxxxx-xx0x und EPxxxx-xx1x 26.5 13.5 Ø 3.5 Abb. 35: Abmessungen Alle Maße sind in Millimeter angegeben. Gehäuseeigenschaften Gehäusematerial PA6 (Polyamid) Vergussmasse Polyurethan Montage zwei Befestigungslöcher Ø 3,5 mm für M3 Metallteile Messing, vernickelt Kontakte CuZn, vergoldet Stromweiterleitung max. -
Seite 44: Abmessungen Epxxxx-Xx2X
Montage und Anschluss 4.1.2 Abmessungen EPxxxx-xx2x 26.5 13.5 Ø 4.5 Abb. 36: Abmessungen Alle Maße sind in Millimeter angegeben. Gehäuseeigenschaften Gehäusematerial PA6 (Polyamid) Vergussmasse Polyurethan Montage zwei Befestigungslöcher Ø 4,5 mm für M4 Metallteile Messing, vernickelt Kontakte CuZn, vergoldet Stromweiterleitung max. 4 A Einbaulage beliebig Schutzart im verschraubten Zustand IP65, IP66, IP67 (gemäß... -
Seite 45: Abmessungen Epxxxx-Xx42
Montage und Anschluss 4.1.3 Abmessungen EPxxxx-xx42 Ø 4,5 Abb. 37: Abmessungen Alle Maße sind in Millimeter angegeben. Gehäuseeigenschaften Gehäusematerial PA6 (Polyamid) Vergussmasse Polyurethan Montage zwei Befestigungslöcher Ø 4,5 mm für M4 Metallteile Messing, vernickelt Kontakte CuZn, vergoldet Stromweiterleitung max. 16 A bei 40°C (gemäß IEC 60512-3) Einbaulage beliebig Schutzart... -
Seite 46: Befestigung
Montage und Anschluss 4.1.4 Befestigung Anschlüsse vor Verschmutzung schützen! Schützen Sie während der Montage der Module alle Anschlüsse vor Verschmutzung! Die Schutzart IP65 ist nur gewährleistet, wenn alle Kabel und Stecker angeschlossen sind! Nicht benutzte An- schlüsse müssen mit den entsprechenden Steckern geschützt werden! Steckersets siehe Katalog. Module mit schmalem Gehäuse werden mit zwei M3-Schrauben montiert. -
Seite 47: Funktionserdung (Fe)
Montage und Anschluss 4.1.5 Funktionserdung (FE) EtherCAT-Box-Module der Typen EPxxxx-002x und EPxxxx-0042 müssen geerdet werden: Die Befestigungslöcher dienen gleichzeitig als Anschlüsse für die Funktionserdung (FE). Stellen Sie sicher, dass die Box über beide Befestigungsschrauben niederimpedant geerdet ist. Das erreichen Sie z.B., indem Sie die Box an einem geerdeten Maschinenbett montieren. Abb. 39: Funktionserdung über die Befestigungslöcher 4.1.6 Zusätzliche Prüfungen... -
Seite 48: Anschlüsse
Montage und Anschluss Anschlüsse 4.2.1 Anzugsdrehmomente für Steckverbinder Schrauben Sie Steckverbinder mit einem Drehmomentschlüssel fest. (z.B. ZB8801 von Beckhoff) Steckverbinder-Durchmesser Anzugsdrehmoment 0,4 Nm 0,6 Nm 7/8“ 1,5 Nm Version: 2.7 EP1xxx... -
Seite 49: Ethercat
Montage und Anschluss 4.2.2 EtherCAT 4.2.2.1 Steckverbinder HINWEIS Verwechselungs-Gefahr: Versorgungsspannungen und EtherCAT Defekt durch Fehlstecken möglich. • Beachten Sie die farbliche Codierung der Steckverbinder: schwarz: Versorgungsspannungen grün: EtherCAT Für den ankommenden und weiterführenden EtherCAT-Anschluss haben EtherCAT-Box-Module zwei grüne M8-Buchsen oder M12-Buchsen. M8-Buchsen M12-Buchsen Belegung... -
Seite 50: Status-Leds
Kategorie 5 (CAT5) nach EN 50173 bzw. ISO/IEC 11801 entsprechen. EtherCAT nutzt vier Adern für die Signalübertragung. Aufgrund der automatischen Leitungserkennung „Auto MDI-X“ können Sie zwischen EtherCAT-Geräten von Beckhoff sowohl symmetrisch (1:1) belegte, als auch gekreuzte Kabel (Cross-Over) verwenden. Detaillierte Empfehlungen zur Verkabelung von EtherCAT-Geräten Version: 2.7... -
Seite 51: Versorgungsspannungen
Montage und Anschluss 4.2.3 Versorgungsspannungen Die EtherCAT Box wird mit zwei Versorgungsspannungen versorgt. • Steuerspannung U Aus der Steuerspannung U werden der Feldbus, die Prozessor-Logik, die Eingänge und auch die Sensorik versorgt. • Peripheriespannung U Die Peripheriespannung U versorgt die digitalen Ausgänge, sie kann separat zugeführt werden. Wird die Peripheriespannung abgeschaltet, so bleiben die Feldbus-Funktion sowie Versorgung und Funktion der Eingänge erhalten. -
Seite 52: Die Potenzialtrennung Gnd
Weiß GND zu U Blau GND zu U Schwarz Funktionserde Grau Die Aderfarben gelten für Leitungen vom Typ: Beckhoff ZK2020-xxxx-xxxx und GND sind bei Modulen der folgenden Typen miteinander verbunden: • EPxxxx-0001 • EPxxxx-0002 • EPxxxx-0008 HINWEIS Die Potenzialtrennung GND... -
Seite 53: Abb. 40 Status-Leds Für Die Versorgungsspannungen
Montage und Anschluss 4.2.3.2 Status-LEDs Abb. 40: Status-LEDs für die Versorgungsspannungen Anzeige Bedeutung (Steuerspannung) Versorgungsspannung U nicht vorhanden leuchtet grün Versorgungsspannung U vorhanden leuchtet rot Wegen Überlastung (Strom > 0,5 A) wurde die aus Versorgungsspannung Us erzeugte Sensorversorgung für alle daraus gespeisten Sensoren abgeschaltet. (Peripheriespannung) Versorgungsspannung U nicht vorhanden... - Seite 54 Montage und Anschluss 4.2.3.3 Leitungsverluste Beachten Sie bei der Planung einer Anlage den Spannungsabfall an der Versorgungs-Zuleitung. Vermeiden Sie, dass der Spannungsabfall so hoch wird, dass die Versorgungsspannungen an der Box die minimale Nennspannung unterschreiten. Berücksichtigen Sie auch Spannungsschwankungen des Netzteils. Spannungsabfall an Leitungen mit M8-Steckverbindern I = 2 A I = 4 A...
-
Seite 55: Digitale Eingänge
Funktion Aderfarbe braun blau Input schwarz Die Aderfarben gelten für 3-adrige M8-Leitungen von Beckhoff: ZK2000-2xxx dient als Sensor-Versorgungsspannung. Sie ist von der Versorgungsspannung U abgezweigt. Anschluss-Beispiele Abb. 42: Digitale Eingänge M8, Anschluss-Beispiele Status-LEDs Neben jeder M8-Buchse befindet sich eine grüne LED. Die LED leuchtet, wenn an dem digitalen Eingang ein High-Pegel erkannt wird. -
Seite 56: Abb. 44 M12-Buchse
Input B weiß blau Input A schwarz grau Die Aderfarben gelten für M12-Leitungen von Beckhoff: ZK2000-5xxx, ZK2000-6xxx, ZK2000-7xxx dient als Sensor-Versorgungsspannung. Sie ist von der Versorgungsspannung U abgezweigt. Anschluss-Beispiele Abb. 45: Digitale Eingänge M12, Anschluss-Beispiele Status-LEDs Jede M12-Buchse hat zwei grüne LEDs. Eine LED leuchtet, wenn am jeweiligen Eingang ein High-Pegel erkannt wird. - Seite 57 Input schwarz grau Die Aderfarben gelten für M12-Leitungen von Beckhoff: ZK2000-5xxx, ZK2000-6xxx, ZK2000-7xxx dient als Sensor-Versorgungsspannung. Sie ist von der Versorgungsspannung U abgezweigt. Anschluss-Beispiele Abb. 48: Digitale Eingänge M12, Anschluss-Beispiele Status-LEDs Jede M12-Buchse hat eine grüne LED. Die LED leuchtet, wenn an dem digitalen Eingang ein High-Pegel erkannt wird.
-
Seite 58: Steckbare Federkraftklemmen
Montage und Anschluss 4.2.4.4 Steckbare Federkraftklemmen Pinbelegung ZS2001-0001 ZS2001-0004 ZS2001-0002 Abb. 50: ZS2001 Kontakt Funktion Input 1 Input 2 Input 3 Input 4 Input 5 Input 6 Input 7 Input 8 „24“ „0V“ ZS2001-0004 hat drei Reihen mit jeweils zehn Klemmkontakten. Die erste Reihe ist belegt wie in der Tabelle dargestellt. - Seite 59 Montage und Anschluss Die Grafik zeigt den Anschluss von 8 Sensoren in Einleitertechnik sowie von jeweils einem Sensor in Zwei- und Dreileitertechnik. Bitte beachten Sie für Steckverbinder ZS2001-0004: zwei Brücken (24 V und 0 V) sind erforderlich um die Klemmstellen für Zwei- und Dreileiteranschlusstechnik zu versorgen. Status-LEDs ZS2001-0002 und ZS2001-0004 haben für jeden digitalen Eingang eine grüne Status-LED.
- Seite 60 Montage und Anschluss 4.2.4.5 D-Sub-Buchsen, 25-polig Pinbelegung Abb. 52: D-Sub-Buchse, 25-polig EP1816-0008 EP1816-1008 EP1816-3008 Channel 1, Input 1 Channel 1, Input 2 Channel 1, Input 3 Channel 1, Input 1 Channel 1, Input 1 Channel 1, Input 4 Channel 1, Input 2 Channel 1, Input 2 Channel 1, Input 5 Channel 1, Input 3...
- Seite 61 Montage und Anschluss Anschluss-Beispiele EP1816-0008 EP1816-1008 EP1816-3008 Abb. 53: Digitale Eingänge D-Sub, Anschluss-Beispiele EP1xxx Version: 2.7...
- Seite 62 Montage und Anschluss Status-LEDs Die D-Sub-Buchse hat zwei grüne Status LEDs. Abb. 54: D-Sub 25 Status-LEDs Version: 2.7 EP1xxx...
-
Seite 63: Digitale Ausgänge (Nur Ep1859-0042)
Output B weiß blau Output A schwarz grau Die Aderfarben gelten für M12-Leitungen von Beckhoff: ZK2000-5xxx, ZK2000-6xxx, ZK2000-7xxx dient als Aktor-Versorgungsspannung. Sie ist von der Versorgungsspannung U abgezweigt. Anschluss-Beispiele Abb. 56: Digitale Ausgänge M12, Anschluss-Beispiele Status-LEDs Leuchtdioden zeigen den Signalzustand der Ausgänge an. -
Seite 64: Ul-Anforderungen
Montage und Anschluss UL-Anforderungen Die Installation der nach UL zertifizierten EtherCAT Box Module muss den folgenden Anforderungen entsprechen. Versorgungsspannung VORSICHT VORSICHT! Die folgenden genannten Anforderungen gelten für die Versorgung aller so gekennzeichneten EtherCAT Box Module. Zur Einhaltung der UL-Anforderungen dürfen die EtherCAT Box Module nur mit einer Spannung von 24 V versorgt werden, die •... -
Seite 65: Atex-Hinweise
Montage und Anschluss ATEX-Hinweise 4.4.1 ATEX - Besondere Bedingungen WARNUNG Beachten Sie die besonderen Bedingungen für die bestimmungsgemäße Verwendung von EtherCAT-Box-Modulen in explosionsgefährdeten Bereichen – Richtlinie 94/9/EG! • Die zertifizierten Komponenten sind mit einem Schutzgehäuse BG2000-0000 oder BG2000-0010 [} 66] zu errichten, das einen Schutz gegen mechanische Gefahr gewährleistet! •... -
Seite 66: Bg2000 - Schutzgehäuse Für Ethercat Box
Montage und Anschluss 29 - Produktionswoche 29 10 - Produktionsjahr 2010 02 - Firmware-Stand 02 01 - Hardware-Stand 01 4.4.2 BG2000 - Schutzgehäuse für EtherCAT Box WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das EtherCAT-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Module beginnen! ATEX WARNUNG... -
Seite 67: Atex-Dokumentation
Hinweise zum Einsatz von EtherCAT-Box-Modulen (EPxxxx-xxxx) in explosionsge- fährdeten Bereichen (ATEX) Beachten Sie auch die weiterführende Dokumentation Hinweise zum Einsatz von EtherCAT-Box-Modulen (EPxxxx-xxxx) in explosionsgefährdeten Berei- chen (ATEX) die Ihnen auf der Beckhoff-Homepage http://www.beckhoff.de im Bereich Download zur Verfügung steht! EP1xxx Version: 2.7... -
Seite 68: Inbetriebnahme Und Konfiguration
Inbetriebnahme und Konfiguration Inbetriebnahme und Konfiguration Einbinden in TwinCAT Die Vorgehensweise zum Einbinden in TwinCAT ist in dieser Schnellstartanleitung beschrieben. Hot Connect ID einstellen (nur EP1111-0000) Es gibt je einen ID-Switch für die Einerstelle, Zehnerstelle und Hunderterstelle der ID. Die ID-Switches sind entsprechend beschriftet: •... -
Seite 69: Beschleunigungs-Sensoren (Ep1816-3008)
Inbetriebnahme und Konfiguration Beschleunigungs-Sensoren (EP1816-3008) EP1816-3008 hat zwei Beschleunigungs-Sensoren. Jeder Beschleunigungs-Sensor misst die Beschleunigung in allen drei Raumrichtungen. Die Beschleunigungs-Sensoren sind um 90° versetzt angeordnet. Das ermöglicht eine Plausibilitätsprüfung der Messwerte. EP1816-3008 kann die Beschleunigungs-Messwerte auch in Neigungswinkel umrechnen: Darstellung der Messwerte [} 70]. -
Seite 70: Parameter
Inbetriebnahme und Konfiguration 5.3.1 Parameter Messbereich CoE-Index 8080:11 „Range“ Wert Messbereich (default) +/- 2 g +/- 4 g +/- 8 g +/- 16 g Abtastrate CoE-Index 8080:0D „Mode“ Wert Abtastrate 1 Hz 10 Hz 25 Hz 50 Hz 100 Hz 250 Hz 400 Hz 1600 Hz (default) 5000 Hz Darstellung der Messwerte CoE-Index 8080:1D „Presentation“ Wert Format-Bezeichnung Beschreibung (default) Raw Values... -
Seite 71: Wiederherstellen Des Auslieferungszustandes
Inbetriebnahme und Konfiguration Wiederherstellen des Auslieferungszustandes Um den Auslieferungszustand der Backup-Objekte bei den ELxxxx-Klemmen / EPxxxx- und EPPxxxx-Boxen wiederherzustellen, kann im TwinCAT System Manger (Config-Modus) das CoE-Objekt Restore default parameters, Subindex 001 angewählt werden). Abb. 65: Auswahl des PDO Restore default parameters Durch Doppelklick auf SubIndex 001 gelangen Sie in den Set Value -Dialog. -
Seite 72: Außerbetriebnahme
Geräte beginnen! Entsorgung Zur Entsorgung muss das Gerät ausgebaut werden. Gemäß der WEEE-Richtlinie 2012/19/EU nimmt Beckhoff Altgeräte und Zubehör in Deutschland zur fachgerechten Entsorgung zurück. Die Transportkosten werden vom Absender übernommen. Senden Sie die Altgeräte mit dem Vermerk „zur Entsorgung“ an: Beckhoff Automation GmbH &... -
Seite 73: Coe-Parameter (Nur Ep1816-Xxxx)
EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen (http://www.beckhoff.de/german/default.htm?download/elconfg.htm) und entsprechend der Installationsanweisungen zu installieren. EP1xxx... - Seite 74 CoE-Parameter (nur EP1816-xxxx) Index Name Flags Default Wert Device type 0x01181389 (18355081 1000 [} 76] Device name EP1816-0008 1008 [} 76] Hardware version 1009 [} 76] Software version 100A [} 77] Subindex Restore default parameters 0x01 (1 1011 [} 76]:0 1011:01 SubIndex 001 0x00000000 (0 Subindex Identity 0x04 (4...
-
Seite 75: Ep1816-0008 - Objektbeschreibung Und Parametrierung
CoE-Parameter (nur EP1816-xxxx) Index Name Flags Default Wert Subindex SM input parameter 0x20 (32 1C33 [} 79]:0 1C33:01 Sync mode 0x0022 (34 1C33:02 Cycle time 0x000186A0 (100000 1C33:03 Shift time 0x00000000 (0 1C33:04 Sync modes supported 0xC007 (49159 1C33:05 Minimum cycle time 0x000124F8 (75000 1C33:06 Calc and copy time... - Seite 76 EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen (http://beckhoff.de/german/download/elconfg.htm? id=1983920606140) und entsprechend der Installationsanweisungen zu installieren. Einführung In der CoE-Übersicht sind Objekte mit verschiedenem Einsatzzweck enthalten:...
- Seite 77 CoE-Parameter (nur EP1816-xxxx) Index 100A Software version Index Name Bedeutung Datentyp Flags Default 100A:0 Software version Firmware-Version des EtherCAT-Slaves string Index 1018 Identity Index Name Bedeutung Datentyp Flags Default 1018:0 Identity Informationen, um den Slave zu identifizieren UINT8 0x04 (4 1018:01 Vendor ID Hersteller-ID des EtherCAT-Slaves...
- Seite 78 CoE-Parameter (nur EP1816-xxxx) Index 1A01 DO TxPDO-Map Inputs Ch.2 Index Name Bedeutung Datentyp Flags Default 1A01:0 DO TxPDO-Map PDO Mapping TxPDO 2 UINT8 0x0B (11 Inputs Ch.2 1A01:01 SubIndex 001 1. PDO Mapping entry (object 0x6010 (DO Inputs Ch.2), UINT32 0x6010:01, 1 entry 0x01 (Input 1)) 1A01:02...
- Seite 79 CoE-Parameter (nur EP1816-xxxx) Index 1C33 SM input parameter Index Name Bedeutung Datentyp Flags Default 1C33:0 SM input para- Synchronisierungsparameter der Inputs UINT8 0x20 (32 meter 1C33:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0022 (34 • 0: Free Run • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
- Seite 80 CoE-Parameter (nur EP1816-xxxx) Index 6000 DO Inputs Ch.1 Index Name Bedeutung Datentyp Flags Default 6000:0 DO Inputs Ch.1 UINT8 0x0E (14 6000:01 Input 1 boolean 0x00 (0 6000:02 Input 2 boolean 0x00 (0 6000:03 Input 3 boolean 0x00 (0 6000:04 Input 4 boolean 0x00 (0...
-
Seite 81: Ep1816-3008 - Objektübersicht
EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen (http://www.beckhoff.de/german/default.htm?download/elconfg.htm) und entsprechend der Installationsanweisungen zu installieren. Index (hex) - Seite 82 CoE-Parameter (nur EP1816-xxxx) Index (hex) Name Flags Default Wert Subindex AI TxPDO-Map Inputs Ch.3 0x05 (5 1A04:0 [} 91] 0x1A04:01 SubIndex 001 0x0000:00, 6 0x1A04:02 SubIndex 002 0x6040:07, 1 0x1A04:03 SubIndex 003 0x0000:00, 8 0x1A04:04 SubIndex 004 0x6040:10, 1 0x1A04:05 SubIndex 005 0x6040:11, 16 Subindex AI TxPDO-Map Inputs Ch.4...
- Seite 83 CoE-Parameter (nur EP1816-xxxx) Index (hex) Name Flags Default Wert Subindex SM input parameter 0x20 (32 1C33:0 [} 93] 0x1C33:01 Sync mode 0x0022 (34 0x1C33:02 Cycle time 0x003D0900 (4000000 0x1C33:03 Shift time 0x00000000 (0 0x1C33:04 Sync modes supported 0xC007 (49159 0x1C33:05 Minimum cycle time 0x00030D40 (200000 0x1C33:06 Calc and copy time...
- Seite 84 CoE-Parameter (nur EP1816-xxxx) Index (hex) Name Flags Default Wert Subindex AI Settings Ch.1 0x18 (24 8020:0 [} 86] 0x8020:01 Enable user scale 0x00 (0 0x8020:0A Enable user calibration 0x00 (0 0x8020:0B Enable vendor calibration 0x00 (0 0x8020:11 User scale offset 0x0000 (0 0x8020:12 User scale gain 0x02A00000 (44040192...
-
Seite 85: Ep1816-3008 - Objektbeschreibung Und Parametrierung
CoE-Parameter (nur EP1816-xxxx) Index (hex) Name Flags Default Wert Subindex AI Settings Ch.6 0x18 (24 8070:0 [} 88] 0x8070:01 Enable user scale 0x00 (0 0x8070:0A Enable user calibration 0x00 (0 0x8070:0B Enable vendor calibration 0x00 (0 0x8070:11 User scale offset 0x0000 (0 0x8070:12 User scale gain 0x02A00000 (44040192... -
Seite 86: Objekte Zur Parametrierung Bei Der Inbetriebnahme
CoE-Parameter (nur EP1816-xxxx) • Objekte die interne Settings [} 88] anzeigen und ggf. nicht veränderlich sind • Weitere Profilspezifische Objekte [} 94], die Ein- und Ausgänge, sowie Statusinformationen anzeigen Im Folgenden werden zuerst die im normalen Betrieb benötigten Objekte vorgestellt, dann die für eine vollständige Übersicht noch fehlenden Objekte. - Seite 87 CoE-Parameter (nur EP1816-xxxx) Index 8040 AI Settings Ch.3 Index (hex) Name Bedeutung Datentyp Flags Default 8040:0 AI Settings Ch.3 UINT8 0x18 (24 8040:01 Enable user scale BOOLEAN 0x00 (0 8040:0A Enable user calibrati- BOOLEAN 0x00 (0 8040:0B Enable vendor cali- BOOLEAN 0x00 (0 bration...
-
Seite 88: Standardobjekte (0X1000-0X1Fff)
CoE-Parameter (nur EP1816-xxxx) Index 806F AI Vendor data Ch.5 Index (hex) Name Bedeutung Datentyp Flags Default 806F:0 AI Vendor data Ch.5 UINT8 0x02 (2 806F:01 Calibration Offset INT16 0x0000 (0 806F:02 Calibration Gain INT16 0x0000 (0 Index 8070 AI Settings Ch.6 Index (hex) Name Bedeutung Datentyp... - Seite 89 CoE-Parameter (nur EP1816-xxxx) Index 1000Device type Index (hex) Name Bedeutung Datentyp Flags Default 1000:0 Device type Geräte-Typ des EtherCAT-Slaves: Das Lo-Word enthält UINT32 0x00001389 das verwendete CoE Profil (5001). Das Hi-Word enthält (5001 das Modul Profil entsprechend des Modular Device Profi- Index 1008Device name Index (hex) Name Bedeutung...
- Seite 90 CoE-Parameter (nur EP1816-xxxx) Index 1A00 DIG TxPDO-Map Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 1A00:0 DIG TxPDO-Map In- PDO Mapping TxPDO 1 UINT8 0x09 (9 puts Ch.1 1A00:01 SubIndex 001 1. PDO Mapping entry (object 0x6000 (DIG Inputs Ch.1), UINT32 0x6000:01, 1 entry 0x01 (Input 1))
- Seite 91 CoE-Parameter (nur EP1816-xxxx) Index 1A03 AI TxPDO-Map Inputs Ch.2 Index (hex) Name Bedeutung Datentyp Flags Default 1A03:0 AI TxPDO-Map Inputs PDO Mapping TxPDO 4 UINT8 0x05 (5 Ch.2 1A03:01 SubIndex 001 1. PDO Mapping entry (13 bits align) UINT32 0x0000:00, 6 1A03:02 SubIndex 002 2.
- Seite 92 CoE-Parameter (nur EP1816-xxxx) Index 1A07 AI TxPDO-Map Inputs Ch.6 Index (hex) Name Bedeutung Datentyp Flags Default 1A07:0 AI TxPDO-Map Inputs PDO Mapping TxPDO 8 UINT8 0x05 (5 Ch.6 1A07:01 SubIndex 001 1. PDO Mapping entry (13 bits align) UINT32 0x0000:00, 6 1A07:02 SubIndex 002 2.
- Seite 93 CoE-Parameter (nur EP1816-xxxx) Index 1C33SM input parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C33:0 SM input parameter Synchronisierungsparameter der Inputs UINT8 0x20 (32 1C33:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0022 (34 • 0: Free Run • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
-
Seite 94: Profilspezifische Objekte (0X6000-0Xffff)
CoE-Parameter (nur EP1816-xxxx) 6.4.3 Profilspezifische Objekte (0x6000-0xFFFF) Die profilspezifischen Objekte haben für alle EtherCAT Slaves, die das Profil 5001 unterstützen, die gleiche Bedeutung. Index 6000 DIG Inputs Ch.1 Index (hex) Name Bedeutung Datentyp Flags Default 6000:0 DIG Inputs Ch.1 UINT8 0x08 (8 6000:01 Input 1... - Seite 95 CoE-Parameter (nur EP1816-xxxx) Index 6050 AI Inputs Ch.4 Index (hex) Name Bedeutung Datentyp Flags Default 6050:0 AI Inputs Ch.4 UINT8 0x11 (17 6050:07 Error BOOLEAN 0x00 (0 6050:10 TxPDO Toggle BOOLEAN 0x00 (0 6050:11 Value INT16 0x0000 (0 Index 6060 AI Inputs Ch.5 Index (hex) Name Bedeutung Datentyp...
- Seite 96 CoE-Parameter (nur EP1816-xxxx) Index F600 DIG Inputs Index (hex) Name Bedeutung Datentyp Flags Default F600:0 DIG Inputs UINT8 0x10 (16 F600:01 Us Undervoltage BOOLEAN 0x00 (0 F600:02 Up Undervoltage BOOLEAN 0x00 (0 F600:10 TxPDO Toggle BOOLEAN 0x00 (0 Version: 2.7 EP1xxx...
-
Seite 97: Anhang
Anhang Anhang Allgemeine Betriebsbedingungen Schutzarten nach IP-Code In der Norm IEC 60529 (DIN EN 60529) sind die Schutzgrade festgelegt und nach verschiedenen Klassen eingeteilt. Die Bezeichnung erfolgt in nachstehender Weise. 1. Ziffer: Staub- und Be- Bedeutung rührungsschutz Nicht geschützt Geschützt gegen den Zugang zu gefährlichen Teilen mit dem Handrücken. Geschützt gegen feste Fremd- körper Ø 50 mm Geschützt gegen den Zugang zu gefährlichen Teilen mit einem Finger. -
Seite 98: Ethercat Box- / Ethercat-P-Box - Zubehör
Wechselklinge für M8/SW9 für Drehmoment-Schraubwerkzeug ZB8801-0000 ZB8801-0002 Wechselklinge für M12/SW13 für Drehmoment-Schraubwerkzeug ZB8801-0000 ZB8801-0003 Wechselklinge für M12 feldkonfektionierbar/SW18 für Drehmoment- Schraubwerkzeug ZB8801-0000 Weiteres Zubehör Weiteres Zubehör finden Sie in der Preisliste für Feldbuskomponenten von Beckhoff und im Internet unter https://www.beckhoff.de Version: 2.7 EP1xxx... -
Seite 99: Versionsidentifikation Von Ethercat-Geräten
Dokumentation angegeben. Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL- Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“. - Seite 100 Anhang KK - Produktionswoche (Kalenderwoche) YY - Produktionsjahr FF - Firmware-Stand HH - Hardware-Stand Beispiel mit Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 - Hardware-Stand 02 Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehe jeweilige Gerätedokumentation): Syntax: D ww yy x y z u D - Vorsatzbezeichnung...
- Seite 101 Anhang Abb. 68: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer Abb. 69: CU2016 Switch mit Seriennummer/ Chargennummer Abb. 70: EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418 EP1xxx Version: 2.7...
- Seite 102 Anhang Abb. 71: EP1258-00001 IP67 EtherCAT Box mit Chargennummer/ DateCode 22090101 und eindeutiger Seriennummer 158102 Abb. 72: EP1908-0002 IP67 EtherCAT Safety Box mit Chargennummer/ DateCode 071201FF und eindeutiger Seriennummer 00346070 Abb. 73: EL2904 IP20 Safety Klemme mit Chargennummer/ DateCode 50110302 und eindeutiger Seriennummer 00331701 Abb. 74: ELM3604-0002 Klemme mit eindeutiger ID-Nummer (QR Code) 100001051 und Seriennummer/ Chargennummer 44160201 Version: 2.7...
-
Seite 103: Beckhoff Identification Code (Bic)
Anhang 7.3.1 Beckhoff Identification Code (BIC) Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff-Produkten zur eindeutigen Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016. Abb. 75: BIC als Data Matrix Code (DMC, Code-Schema ECC200) Die Einführung des BIC erfolgt schrittweise über alle Produktgruppen hinweg. - Seite 104 Beispiel einer zusammengesetzten Information aus den Positionen 1 bis 4 und 6. Die Datenidentifikatoren sind zur besseren Darstellung jeweils rot markiert: Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr. 2). Die BTN ist eine eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen Seriennummern- Systeme bei Beckhoff ersetzen wird (z.
-
Seite 105: Support Und Service
Anhang Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Support Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:... - Seite 106 Abbildungsverzeichnis Abbildungsverzeichnis Abb. 1 EtherCAT-Box-Module in einem EtherCAT-Netzwerk ..............Abb. 2 EtherCAT Box mit M8-Anschlüssen für Sensor/Aktoren ............. Abb. 3 EtherCAT Box mit M12-Anschlüssen für Sensor/Aktoren ............Abb. 4 EP1008-0001, EP1008-0002, EP1018-0001, EP1018-0002............Abb. 5 EP1008-0022..........................Abb. 6 EP1008-00xx, Prozessabbild....................... Abb.
- Seite 107 Abbildungsverzeichnis Abb. 45 Digitale Eingänge M12, Anschluss-Beispiele ................Abb. 46 Status-LEDs an M12-Buchsen ....................Abb. 47 M12-Buchse..........................Abb. 48 Digitale Eingänge M12, Anschluss-Beispiele ................Abb. 49 Status-LED an einer M12-Buchse von EP1008-0022 ..............Abb. 50 ZS2001 ............................Abb. 51 Digitale Eingänge ZS2001, 8 Kanäle................... Abb.