fischertechnik Smart Robots Pro Schnellstartanleitung
Smart Robots Pro
Getting Started
Für deine ersten Schritte in der Welt von Smart
Robots Pro empfehlen wir dir, das Einstiegsvideo
zu schauen. Bei diesem lernst du unter anderem,
wie du dich mit dem Controller verbindest, wie
man einen Schnittstellentest macht und die
Controllerkonfiguration durchführt.
Danach kannst du schon beginnen zu
programmieren.
Es lohnt sich, die Modelle in der hier
aufgezeigten Reihenfolge zu bauen und zu
programmieren. Nach und nach lernst du neue
Programmierbausteine kennen, die du in späteren Aufgaben wieder benötigst.
Viel Spaß!
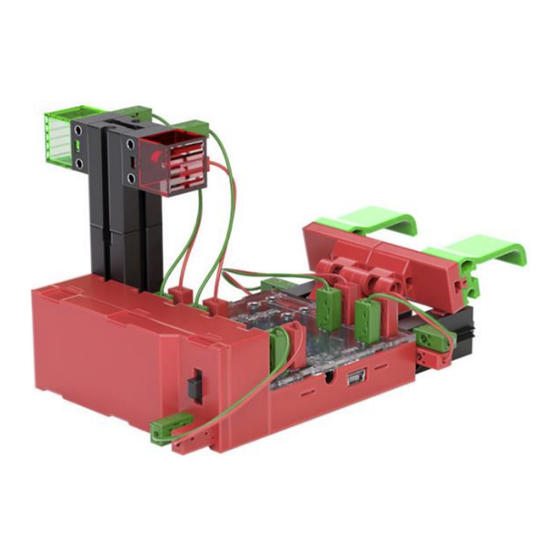
Karussell
Svenja war letzte Woche auf einem Volksfest
und konnte viele verschiedene
Kirmesmaschinen testen. Am besten gefiel ihr
das Karussell. Sie konnte gar nicht genug vom
Fahren bekommen. Deshalb entscheidet
Svenja, dass sie sich einfach ihr eigenes
Karussell baut. Kannst du ihr beim
Zusammenbau und der Programmierung
helfen?
•
Baue das Modell anhand der Bauanleitung auf.
•
Schließe die Kabel entsprechend dem Schaltplan an.
•
Starte die Software ROBO Pro Coding.
•
Verbinde den BT-Smart Controller über die Bluetooth-Schnittstelle mit dem
Computer oder einem anderen mobilen Endgerät.
Aufgabe 1:
Wenn der Controller verbunden ist, kannst du über den Schnittstellentest bereits
die erste Testfahrt durchführen.
Schiebe dazu einfach den Regler des Motor 1 nach rechts und beobachte, wie sich
das Karussell dreht. Du kannst das Karussell auch in die andere Richtung fahren
lassen, indem du die Drehrichtung auf links änderst.

Verwandte Anleitungen für fischertechnik Smart Robots Pro













Inhaltszusammenfassung für fischertechnik Smart Robots Pro
- Seite 1 Smart Robots Pro Getting Started Für deine ersten Schritte in der Welt von Smart Robots Pro empfehlen wir dir, das Einstiegsvideo zu schauen. Bei diesem lernst du unter anderem, wie du dich mit dem Controller verbindest, wie man einen Schnittstellentest macht und die Controllerkonfiguration durchführt.
- Seite 2 Tipp: Falls du dir nicht sicher bist, wo du den Schnittstellentest findest und wie er funktioniert, schaue dir am besten noch einmal das Einstiegsvideo an. Das Karussell hat Lichter eingebaut, diese kannst du im Schnittstellentest über den Regler des Motor 2 ein- und ausschalten. Was passiert, wenn du die „Richtung“...
- Seite 3 und die rote LED bei der schnellen Geschwindigkeit aufleuchten. Kannst du diese Funktion in deinem bisherigen Programm ergänzen? Tipp: LEDs funktionieren nur in eine „Richtung“. Das heißt die LED leuchtet, wenn der Strom von + zu – fließt. Sie leuchtet aber nicht, wenn der Strom von – zu + fließt. Diese Eigenschaft können wir uns zu Nutze machen, sodass wir mit einem Ausgang zwei Lampen ansteuern können.
- Seite 4 Useless Machine Niks kleiner Bruder Ole schnappt sich manchmal Niks Süßigkeiten. Deshalb beschließt er, sich eine kleine Box zu bauen, die sich nur ganz kurz öffnet. Da Ole noch nicht so schnell ist, kann sich Nik die Süßigkeiten aus der Box nehmen, Ole aber nicht. Außerdem macht es einfach Spaß, die Box zu bedienen und zu beobachten.
- Seite 5 Tanzroboter Clara liebt den Karneval und Umzüge jeglicher Art. Allerdings werden ihre Hände von dem vielen Winken irgendwann immer so schwer. Damit sie trotzdem die viele schönen Wägen beim Stadtumzug grüßen kann, baut sie einfach einen Roboter, der für und mit ihr winkt. •...
- Seite 6 Drivebot • Baue das Modell anhand der Bauanleitung auf. • Schließe die Kabel entsprechend dem Schaltplan • Starte die Software ROBO Pro Coding. • Verbinde den BT-Smart Controller über die Bluetooth -Schnittstelle mit dem Computer oder einem anderen mobilen Endgerät. •...
-
Seite 7: Joystick - Fernsteuerung
Joystick – Fernsteuerung Nun schreiben wir ein kleines Programm, mit dem wir unsere Fahrroboter ganz einfach fernsteuern können. Das Programm beinhaltet einen digitalen Joystick. Dieser Joystick kann auf deinem Touch-Display oder auf dem Computer hin- und her gezogen werden. Unser Fahrroboter soll dann in die Richtung fahren, in die wir den Joystick ziehen. - Seite 8 Nun erscheint eine neue leere Oberfläche. Diese Oberfläche werden wir auf unserem Computer oder Tablet sehen, wenn wir das Programm starten. Zunächst ziehen wir auf diese Oberfläche den sogenannten RCJoystick:...
- Seite 9 Über die grünen Punkte an den Ecken kannst du den Joystick größer oder kleiner ziehen. Nun haben wir schon einen Joystick erstellt. Teste ihn aus, indem du deinen Controller verbindest und das Programm in Robo Pro Coding startest. Du siehst: Mit dem Programmstart öffnet sich das zuvor gezeichnete Fenster und du kannst den inneren Teil des Joysticks hin und her ziehen.
- Seite 10 Dazu wechseln wir zunächst in die Lernstufe 2 und erstellen unter Variablen zwei neue Variabeln: Diese Variablen benennen wir „RC_pos_X“ und „RC_pos_Y“. Unter dem Reiter Variablen können wir nun jederzeit auf diese Speicher zugreifen. Unter dem Feld Fernbedienung gibt es einen Joystick-Event-Block, den wir dazu verwenden können, immer die aktuellen Werte der Joystick-Position in unsere Variablen zu schreiben.
- Seite 11 In seiner Ausgangsposition hat er die Werte X=0 und Y=0. Je weiter man den Joystick nach oben zieht, desto größer werden die Y-Werte. Je weiter man den Joystick nach unten zieht, desto kleiner werden die Y-Werte (sie werden zu negativen Werten). Aufgabe 1: Schreibe ein Programm, das beide Motoren auf volle Geschwindigkeit setzt, wenn die Variable...
- Seite 12 Aufgabe 3: Da die Spannung bei sehr kleinen Werten nicht ausreicht, um den Fahrroboter zu bewegen, führen wir weitere Zonen ein. Nämlich soll der Fahrroboter erst losfahren, wenn der Wert der Y-Variable größer bzw. kleiner als 100 / -100 ist. Dazu benötigen wir noch eine weitere Abfrage, die wir neu kennen lernen: Die ODER- Verknüpfung:...
- Seite 13 Aufgabe 5: (Expertenaufgabe): Zieht man den Joystick schräg, hält der Roboter aktuell noch an. Schreibe nun ein Programm, dass der Roboter eine große Kurve fährt, wenn der Joystick in einem der vier restlichen Felder steht. Ergänze dazu das Programm aus Aufgabe 4.
-
Seite 14: Teach-In Roboter
Teach-In Roboter Teach-In Roboter kann man mithilfe von Eingaben direkt am Roboter beibringen, was sie tun sollen. Sie sind kompliziert zu programmieren, deshalb kannst du direkt das Beispielprogramm in Robo Pro Coding öffnen. • Baue das Modell anhand der Bauanleitung auf. •... - Seite 15 Alarmanlage In Deutschland wurde 2022 in mehr als 65.000 Wohnungen eingebrochen. Das entspricht 178 Einbrüchen pro Tag. Gut, wer sich zu helfen weiß und sich mit Technik schützen kann. Um kennenzulernen, wie eine Alarmanlage funktioniert, bauen wir selbst eine. • Baue das Modell anhand der Bauanleitung auf.
- Seite 16 Ventilator Ventilatoren sind sehr einfache, aber nützliche Maschinen. Einen einfachen Ventilator kann man ein- und ausschalten, mache auch hin und her bewegen lassen. Wir wollen uns nun einen intelligenten Ventilator bauen, der diese beiden Funktionen automatisch startet. • Baue das Modell anhand der Bauanleitung auf.
- Seite 17 Bauteilspender • Baue das Modell anhand der Bauanleitung auf. • Schließe die Kabel entsprechend dem Schaltplan an. • Starte die Software ROBO Pro Coding. • Verbinde den BT-Smart Controller über die Bluetooth- oder USB-Schnittstelle mit dem Computer oder einem anderen mobilen Endgerät.
- Seite 18 Malroboter • Baue das Modell anhand der Bauanleitung auf. • Schließe die Kabel entsprechend dem Schaltplan an. • Starte die Software ROBO Pro Coding. • Verbinde den BT-Smart Controller über die Bluetooth- oder USB-Schnittstelle mit dem Computer oder einem anderen mobilen Endgerät.
- Seite 19 Ballspiel • Baue das Modell nach der online Bauanleitung auf. • Baue das Modell mit den zusätzlichen Optimierungsschritten um. Diese findest du online • Schließe die Kabel entsprechend dem Schaltplan an. • Starte die Software ROBO Pro Coding. • Verbinde den BT-Smart Controller über die Bluetooth- oder USB- Schnittstelle mit dem Computer oder einem anderen mobilen Endgerät.
- Seite 20 Schiffschaukel • Baue das Modell anhand der Bauanleitung auf. • Schließe die Kabel entsprechend dem Schaltplan an. • Starte die Software ROBO Pro Coding. • Verbinde den BT-Smart Controller über die Bluetooth- oder USB-Schnittstelle mit dem Computer oder einem anderen mobilen Endgerät.