Beckhoff KL2531 Dokumentation
Einkanalige schrittmotorklemmen

Verwandte Anleitungen für Beckhoff KL2531













Inhaltszusammenfassung für Beckhoff KL2531
- Seite 1 Dokumentation | DE KL2531/KS2531, KL2541/KS2541 Einkanalige Schrittmotorklemmen 07.12.2021 | Version: 2.2.0...
-
Seite 3: Inhaltsverzeichnis
Hinweise zur Dokumentation ...................... 5 Sicherheitshinweise ........................... 6 Ausgabestände der Dokumentation .................... 7 2 Produktübersicht ............................. 10 KL2531 - Einführung........................ 10 KL2531 - Technische Daten ...................... 11 KL2531 - LED-Anzeigen ........................ 12 KL2541 - Einführung........................ 13 KL2541 - Schaltverhalten ........................ 13 KL2541 - Technische Daten ...................... 14 KL2541 - LED-Anzeigen ........................ 15 Grundlagen zur Funktion ......................... 16... - Seite 4 Register-Page 3 (Anwender-Geschwindigkeits- und Beschleunigungstabelle).... 93 Beispiele für die Register-Kommunikation.................. 95 5.6.1 Beispiel 1: Lesen des Firmware-Stands aus Register 9 .......... 95 5.6.2 Beispiel 2: Beschreiben eines Anwender-Registers ............ 95 6 Anhang .............................. 99 Support und Service ........................ 99 Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 5: Vorwort
, XFC , XTS und XPlanar sind eingetragene und lizenzierte Marken der Beckhoff Automation GmbH. Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen. Patente Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und... -
Seite 6: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 7: Ausgabestände Der Dokumentation
• Registerbeschreibung erweitert 1.7.0 • Montagehinweise erweitert • Technische Daten aktualisiert • Beschreibung der Temperaturüberwachung erweitert • Aderfarben in den Anschlussbeispielen an die Farben der Motorleitung ZK4000-6200-2xxx für Beckhoff Schrittmotoren (AS10x0) angepasst 1.6.3 • Beschreibung der Betriebsarten erweitert • Registerbeschreibung erweitert •... - Seite 8 • Beschreibung der Konfigurations-Software KS2000 erweitert • KL2541 hinzugefügt • Registerbeschreibung aktualisiert und Register-Pages hinzugefügt • weitere Betriebsarten hinzugefügt: • Beschreibung der Konfigurations-Software KS2000 erweitert • erste vorläufige Vorabdokumentation für KL2531 • beschreibt nur die Betriebsart Geschwindigkeit Firm- und Hardware-Stände Dokumentation KL2531-0000, KS2531-0000...
- Seite 9 Beispiel mit Seriennummer 12 06 3A 02: WW - Produktionswoche (Kalenderwoche) 12 - Produktionswoche 12 YY - Produktionsjahr 06 - Produktionsjahr 2006 FF - Firmware-Stand 3A - Firmware-Stand 3A HH - Hardware-Stand 02 - Hardware-Stand 02 KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 10: Produktübersicht
Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Mircostepping sichergestellt. Die integrierte Überwachung der mechanischen Last spart in vielen Anwendungen das Gebersystem oder den Endlagenschalter ein. Die Busklemme ist als KL2531 für Standardverdrahtung [} 44] und als KS2531 für stehende Verdrahtung [} 45] lieferbar. Version: 2.2.0... -
Seite 11: Kl2531 - Technische Daten
Produktübersicht KL2531 - Technische Daten Technische Daten KL2531-0000, KS2531-0000 Anzahl der digitale Ausgänge 1, für einen Schrittmotor (2 Phasen) Spannungsversorgung für Endstufe (über 8 V bis 24 V Powerkontakte) Ausgangsstrom max. 1,5 A (überlast- und kurzschlussfest) Stromreglerfrequenz ca. 25 kHz Maximale Schrittfrequenz 125 kHz Schrittmuster Vollschritt, Halbschritt, 4 / 8 / 16 / 32 / 64-fach-Microstepping Auflösung... -
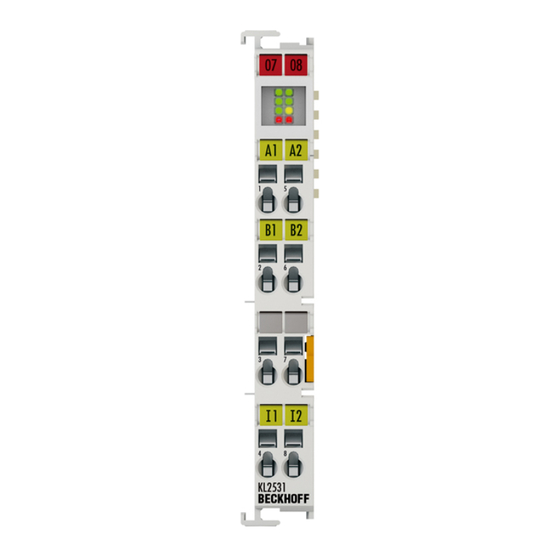
Seite 12: Kl2531 - Led-Anzeigen
Motor wird im Uhrzeigersinn (clock wise) angesteuert Enable (grün) Motoransteuerung ist gesperrt (Bit SB.0 [} 77] im Status-Byte ist nicht gesetzt) oder KL2531 ist nicht Betriebsbereit Motoransteuerung ist freigeschaltet (Bit SB.0 [} 77] im Status-Byte ist gesetzt) und KL2531 ist Betriebsbereit Error A (rot) blinkt (1 Hz) -
Seite 13: Kl2541 - Einführung
KL2541 über abgeschirmte Leitungen anzuschließen. Der Sensor/Signalgeber muss eine ausreichend steile Signalflanke erzeugen können. Das verwendete Netzteil sollte über ausreichend Reserven/Puffer verfügen, damit trotz kapazitiven/induktiven Verlusten auf der Zuleitung das Signal die Klemme mit ausreichender Flankensteilheit erreicht. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 14: Kl2541 - Technische Daten
IP20 zulässige Einbaulage ohne Lüftermodul ZB8610: Standard-Einbaulage mit Lüftermodul ZB8610: Standard-Einbaulage, weitere Einbaulagen (Beispiel 1 & 2), siehe Hinweis [} 41] Kennzeichnung / Zulassung CE, UKCA, cULus [} 47], EAC *) Real zutreffende Zulassungen/Kennzeichnungen siehe seitliches Typenschild (Produktbeschriftung). Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 15: Kl2541 - Led-Anzeigen
- offene Last an Brücke B (Bit SW.12 [} 80] im Status-Wort ist gesetzt) - Überstrom an Brücke A (Bit SW.13 [} 80] im Status-Wort ist gesetzt) - Überstrom an Brücke B (Bit SW.11 [} 80] im Status-Wort ist gesetzt) KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 16: Grundlagen Zur Funktion
Zwei Schrittmotorklemmen für optimalen Einsatz Die Schrittmotorklemmen KL2531 und KL2541 unterscheiden sich durch ihre Leistungsklassen. • Die KL2531 deckt mit ihrer geringen Bauform, von nur 12 mm, den unteren Leistungsbereich ab. Die Versorgungsspannung kann bis zu 24 V betragen und ist zur einfachen Integration in das 24 V Steuerspannungsnetz vorgesehen. -
Seite 17: Parameter Eines Schrittmotors
Frequenz, an eine Position fahren. Wenig verbreitet ist heute noch die Möglichkeit, über die vom Schrittmotor zurückgespeiste Spannung, eine Erkennung der Rotorlage durchzuführen. Die Busklemmen KL2531 und KL2541 enthalten eine Statusrückmeldung, die mit einer Auflösung von 3 Bit die Belastung des Motors wiedergibt. Eine „echte“... - Seite 18 Übersetzung gesteigert werden. Eine elegante Lösung zur Erhöhung der Positioniergenauigkeit ist das Microstepping der KL2531 und KL2541. Es erlaubt bis zu 64 Zwischenschritte. Der geringere, „künstliche“ Schrittwinkel hat einen weiteren positiven Effekt: Bei gleicher Genauigkeit kann der Antrieb mit einer höheren Geschwindigkeit gefahren werden.
-
Seite 19: Bestimmung Des Schrittmotors
Stromaufnahme gemessen werden und die Motorspannungsversorgung entsprechend dimensioniert werden. Beispiel für typische Anwendungen Eine KL2541, die einen Schrittmotor mit max. 5 A Spulenstrom in einer typischen Anwendung betreibt, kann in der Regel mit einer Motorversorgung von 48 V / 2,5 A betrieben werden. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 20: Weitere Parameter
R45 auf z. B. 50% gesetzt werden. Durch Setzen der Control-Bits CB.3 [} 77] oder CW.11 [} 79] wird manuell ein Haltestrom in die Motorwicklungen eingeprägt. Dies kann im Stillstand und beim Fahren des Motors erfolgen. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 21: Abb. 5 Ritzel Mit Induktivem Näherungsschalter (Register R51 = 8)
Microsteps pro Vollschritt MS = 2 Reg33 Motor Vollschritte Reg46 Schrittweite pro Viertelperiode Reg51 Anzahl Impulse pro Umdrehung aktuelle Position (Sollwert) [Pos] = Microsteps ∆Pos relativer Positionsfehler [∆Pos] = Microsteps Abb. 5: Ritzel mit induktivem Näherungsschalter (Register R51 = 8) KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... - Seite 22 Latch-Wert ist erreicht, wenn die Klemme SW.6 nicht mehr analog zum CW.6 wechselt. Freigabe muss erhalten bleiben! Beim Auslesen der Latch-Werte muss die vorher gesetzte Freigabe erhalten bleiben. Die Latch- Werte gehen verloren, wenn die Freigabe weggenommen wird! Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 23: Fehleranzeige
Bei Auftreten eines Fehlers muss dieser zunächst behoben und anschließend durch Setzen des Bits CB.6 [} 77] im Control-Byte quittiert und damit gelöscht werden. Temperaturüberwachung Die Schrittmotorklemmen KL2531 und KL2541 haben eingebaute Temperaturüberwachung für die Gehäuseinnentemperatur und den Stepper-Controller-Chip. Temperaturwarnung Erreicht die Temperatur im Klemmengehäuse 80°C wird im Status-Byte das Bit SB.5 [} 77] (Warning) gesetzt. -
Seite 24: Abb. 6 Kl2541 - Gehäuseinnentemperatur (Worst Case)
HINWEIS Temperaturüberwachung kontrollieren! Kontrollieren Sie die Temperaturüberwachungen aus ihrem Anwenderprogramm heraus, wenn Sie die Schrittmotorklemmen KL2531 und KL2541 an deren Leistungsgrenzen betreiben! Temperaturdiagramm der KL2541 Ab Hardware-Stand [} 7] 10 der KL2541 ist das folgende Diagramm anwendbar. Abb. 6: KL2541 - Gehäuseinnentemperatur (worst case) Dieses Diagramm stellt die Gehäuseinnentemperatur (worst case) der KL2541 bei 55°C... -
Seite 25: Microstepping
Das Microstepping können Sie mit Register R46 [} 88] und den Registern R48 [} 89] bis R63 [} 90] oder mit dem Dialog Stromtabelle [} 66] der Konfigurationssoftware KS2000 vorgeben. Microstepping Schritte pro Viertelperiode Vollschritt Halbschritt 1/4-Schritt 1/8-Schritt 1/16-Schritt 1/32-Schritt 1/64-Schritt KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 26: Abb. 7 Stromverlauf Microstepping
Produktübersicht Abb. 7: Stromverlauf Microstepping Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 27: Betriebsarten
Betriebsarten Die Betriebsarten können Sie mit der Konfigurations-Software KS2000 [} 61] oder per Register- Kommunikation über das Feature-Register RP0.R32 [} 87] auswählen. Die Schrittmotorklemmen KL2531 und KL2541 unterstützen folgende Betriebsarten: • Geschwindigkeit, direkt [} 27] • Geschwindigkeit, mit Rampen [} 28] • Positionsnachführung [} 29] •... -
Seite 28: Geschwindigkeit, Mit Rampen
Umdrehungen pro Sekunde [RPS] = N / s Microsteps MS = 2 interne Taktfrequenz f = 16 MHz Wert in Register 33 Anzahl der Vollschritte des Motors pro Umdrehung RP0.R33 [} 87] Wert in Register 46 Anzahl der Schritte/Viertelperiode RP0.R46 [} 88] Wert im Ausgangsdatenwort DataOUT [} 76] Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 29: Positionsnachführung
Hierbei wird von der NC eine 16 Bit Sollposition vorgegeben. Die Klemme versucht dieser Position zu folgen, indem der interne Lageregler eine Geschwindigkeit berechnet. Die zwei Parameter in Register RP0.R48 [} 89] (Kp-Faktor) und RP0.R49 [} 89] (Kv-Faktor) werden hierfür verwendet. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 30: Fahrwegsteuerung
Diese Betriebsart ist für einfache Positionierungen aus einer herkömmlichen SPS (keine NC) heraus gedacht. In der Betriebsart Fahrwegsteuerung gibt es die Varianten: • Manuell • Fahrauftrag (einfach) • Sollposition über Prozessdaten vorgeben (nur KL2531-1000 und KL2541-1000) • Fahrauftrag (mehrfach) • Auto-Start-Funktion • Schnell-Start-Funktion •... - Seite 31 Motor manuell zu fahren. 15. Löschen Sie jetzt den Geschwindigkeitswert in DataOUT ein, um den Motor wieder anzuhalten. 2.11.4.3 Sollpositipon über Prozessdaten vorgeben (nur KL2531-1000 und KL2541-1000) Alternativ können Sie bei der Sondervariante KL2541-1000 die Zielposition auch über die Prozessdaten vorgeben.
- Seite 32 • RP3.R49: Beschleunigung 1 • usw. Für sinnvollen und effektiven Fahrbetrieb mit mehrfacher Positionierung können die folgenden Register umparametriert werden: • RP0.R38 [} 88]: minimale Geschwindigkeit • RP0.R58 [} 90]: maximale Verzögerung (muss durch Bit RP0.R52.1 [} 89] aktiviert werden) Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
- Seite 33 20. Löschen Sie das Bit CB.2 [} 77] um den fünften Fahrauftrag abzuschließen, wenn die Klemme durch Setzen von Bit SW.3 [} 80] das Erreichen der Position 2 signalisiert hat. 21. Tragen Sie über Registerkommunikation das Stop-Kommando 0x0540 [} 86] in Register R7 [} 85] ein, um den 'mehrfachen' Fahrauftrag zu stoppen. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 34: Auto-Start-Funktion
Bit CB.1 [} 77] im Control-Byte wird die Funktion eingeschaltet und der Motor sofort mit der Notfall- Beschleunigung (Register R50 [} 89]) gestoppt. Dies kann z. B. bei einem aktiven Fahrauftrag nützlich sein, der mit einer kleinen Verzögerung konfiguriert ist. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 35: Referenzierung
Referenzierung. Gleichzeitig wird die in RP0.R55 [} 90] und RP0.R56 [} 90] konfigurierte Referenzierposition als Ist-Position gesetzt. 11. Löschen Sie im Control-Byte das Bit CB.2 [} 77] um die Referenzierung abzuschließen. 12. Die Klemme quittiert dies durch Löschen des Bits SW.3 [} 80]. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 36: Abb. 8 Selbstjustierung
10. Setzen Sie jetzt über Prozessdatenkommunikation die Geschwindigkeit auf null und löschen Sie die Latchfreigabe (die aktuelle Position wird jetzt korrigiert). 11. Tragen Sie über Registerkommunikation das Stop-Kommando 0x0540 [} 86] in Register R7 [} 85] ein, um die Selbstjustierung zu deaktivieren. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 37: Montage Und Verdrahtung
• Beim Umgang mit den Komponenten ist auf gute Erdung der Umgebung zu achten (Arbeitsplatz, Verpa- ckung und Personen) • Jede Busstation muss auf der rechten Seite mit der Endklemme KL9010 abgeschlossen werden, um Schutzart und ESD-Schutz sicher zu stellen. Abb. 9: Federkontakte der Beckhoff I/O-Komponenten Tragschienenmontage WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! -
Seite 38: Abb. 10 Montage Auf Tragschiene
Achten Sie bei der Montage der Komponenten darauf, dass der Verriegelungsmechanismus nicht in Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befesti- gung von Tragschienen mit einer Höhe von 7,5 mm unter den Klemmen und Kopplern flache Mon- tageverbindungen wie Senkkopfschrauben oder Blindnieten. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 39: Abb. 11 Demontage Von Tragschiene
EL91xx, EL92xx) unterbrechen die Powerkontakte und stellen so den Anfang einer neuen Ver- sorgungsschiene dar. PE-Powerkontakt Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist aus Sicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125 A ableiten. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 40: Montagevorschriften Für Erhöhte Mechanische Belastbarkeit
Die Klemmen sind folgenden zusätzlichen Prüfungen unterzogen worden: Prüfung Erläuterung Vibration 10 Frequenzdurchläufe, in 3-Achsen 6 Hz < f < 60 Hz Auslenkung 0,35 mm, konstante Amplitude 60,1 Hz < f < 500 Hz Beschleunigung 5 g, konstante Amplitude Schocken 1000 Schocks je Richtung, in 3-Achsen 25 g, 6 ms Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 41: Einbaulagen Bei Betrieb Mit Und Ohne Lüfter
Für die vorgeschriebene Einbaulage wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KL-Klemmen weisen nach vorne (siehe Abb. „Empfohlene Abstände Einbaulage bei Betrieb ohne Lüfter“). Die Klemmen werden dabei von unten nach oben durchlüftet, was eine optimale Kühlung der Elektronik durch Konvektionslüftung ermöglicht. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 42: Abb. 13 Empfohlene Abstände Einbaulage Bei Betrieb Ohne Lüfter
Für die Standard-Einbaulage beim Betrieb mit Lüfter wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KL-Klemmen weisen nach vorne (siehe Abb. „Empfohlene Abstände bei Betrieb mit Lüfter“). Die Klemmen werden dabei unterstützend vom z. B. ZB8610 Lüftermodul von unten nach oben durchlüftet. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 43: Abb. 14 Empfohlene Abstände Bei Betrieb Mit Lüfter
Durch die verstärkende Wirkung auf die Kühlung der Klemmen durch den Lüfter sind ggf. weitere Einbaulagen zulässig (siehe Abb. „Weitere Einbaulagen, Beispiel 1 und 2“); entnehmen Sie entsprechende Hinweise bitte den Technischen Daten der Klemme. Abb. 15: Weitere Einbaulagen, Beispiel 1 KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 44: Anschluss
• Die High-Density-Klemmen (HD-Klemmen) enthalten Elektronik und Anschlussebene in einem Gehäuse und haben eine erhöhte Packungsdichte. Standardverdrahtung (ELxxxx / KLxxxx) Abb. 17: Standardverdrahtung Die Klemmen der Serien ELxxxx und KLxxxx sind seit Jahren bewährt und integrieren die schraublose Federkrafttechnik zur schnellen und einfachen Montage. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 45: Abb. 18 Steckbare Verdrahtung
Die High-Density-Klemmen der Serien ELx8xx und KLx8xx unterstützen keine steckbare Verdrah- tung. Ultraschall-litzenverdichtete Leiter Ultraschall-litzenverdichtete Leiter An die Standard- und High-Density-Klemmen können auch ultraschall-litzenverdichtete (ultraschall- verschweißte) Leiter angeschlossen werden. Beachten Sie die Tabellen zum Leitungsquerschnitt [} 46]! KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 46: Verdrahtung
Leiter wird nach dem Abisolieren einfach in die Klemmstelle gesteckt. Das Lösen der Leitungen erfolgt, wie bei den Standardklemmen, über die Kontakt-Entriegelung mit Hilfe eines Schraubendrehers. Den zulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 47: Schirmung
The modules are intended for use with Beckhoff’s UL Listed EtherCAT System only. Examination For cULus examination, the Beckhoff I/O System has only been investigated for risk of fire and electrical shock (in accordance with UL508 and CSA C22.2 No. 142). For devices with Ethernet connectors Not for connection to telecommunication circuits. - Seite 48 • von einer Spannungsquelle die NEC class 2 entspricht. Eine Spannungsquelle entsprechend NEC class 2 darf nicht seriell oder parallel mit einer anderen NEC class 2 entsprechenden Spannungsquelle verbunden werden! Diese Anforderungen gelten für die Versorgung aller EtherCAT Buskoppler, Netzteilklemmen, Busklemmen und deren Power-Kontakte. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 49: Kl2531 - Anschluss
Digitaler Eingang 2 (24 V Der aktuelle Counter-Wert wird als Referenzmarke im Latch-Register gespeichert, wenn im Control-Wort das Bit CW.2 [} 79] gesetzt ist und eine steigende Flanke am digitalen Eingang 2 auftritt. Anschlussbeispiele Beachten Sie die Anschlussbeispiele [} 50] für die KL2531. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 50: Kl2531 - Allgemeine Anschlussbeispiele
• den einen Motorstrang an die Klemmpunkte A1 und A2, • den anderen Motorstrang an die Klemmpunkte B1 und B2. Anschlussarten Die Schrittmotorklemme KL2531 hat bipolare Endstufen und kann damit bipolare und unipolare Motoren ansteuern. Bipolaren Motoren Bipolare Ansteuerung (seriell) eines bipolaren... -
Seite 51: Kl2541 - Anschluss
Dokumentation zu Schrittmotoren von Beckhoff Diese beiden Beispiele zeigen den Anschluss der bipolaren Beckhoff-Motoren AS1010, AS1020 oder AS1030. Weitere Informationen zu Schrittmotoren von Beckhoff finden Sie in der zugehörigen Dokumentation, die auf unserer Internetseite http://www.beckhoff.de unter Download zur Verfü- gung steht. -
Seite 52: Abb. 24 Kl2541-0000 - Anschluss
Encoder-Versorgung (von negativem Powerkontakt) Input 2 Digitaler Eingang 2 (24 V ). Der aktuelle Counter-Wert wird als Referenzmarke im Latch-Register ge- speichert, wenn im Control-Wort das Bit CW.2 [} 79] gesetzt ist und eine steigende Flanke am digita- len Eingang 2 auftritt. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... - Seite 53 Initialisierung wird durchgeführt. WARNUNG Motor stoppt nicht bei Ausfall der K-Bus-Spannung! Falls die K-Bus-Spannung (5 V) ausfällt, wird der Motor-Controller nicht zurückgesetzt! D. h. wenn der Mo- tor in Bewegung ist, wird er nicht gestoppt! KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 54: Kl2541 - Allgemeine Anschlussbeispiele
Die Schrittmotorklemme KL2541 hat bipolare Endstufen und kann damit bipolare und unipolare Motoren ansteuern. Bipolaren Motoren Bipolare Ansteuerung (seriell) eines bipolaren Bipolare Ansteuerung (parallel) eines bipolaren Motors Motors Abb. 25: KL2541 - Bipolare Ansteuerung seriell (links) und parallel (rechts) eines bipolaren Motors Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 55: Abb. 26 Kl2541 - Bipolare Ansteuerung Eines Unipolaren Motors
Diese beiden Beispiele zeigen den Anschluss der bipolaren Beckhoff-Motoren AS1010, AS1020, AS1030, AS1050 oder AS1060. Weitere Informationen zu Schrittmotoren von Beckhoff finden Sie in der zugehörigen Dokumentati- on, die auf unserer Internetseite http://www.beckhoff.de unter Download zur Verfügung steht. Unipolare Motoren Bipolare Ansteuerung eines unipolaren Motors Abb. 26: KL2541 - Bipolare Ansteuerung eines unipolaren Motors... -
Seite 56: Entsorgung
Der Encoder wird über die Klemmstellen 3 (+24 V) und 7 (0 V) aus den Powerkontakten versorgt. 3.11 Entsorgung Mit einer durchgestrichenen Abfalltonne gekennzeichnete Produkte dürfen nicht in den Hausmüll. Das Gerät gilt bei der Entsorgung als Elektro- und Elektronik-Altgerät. Die nationalen Vorgaben zur Entsorgung von Elektro- und Elektronik-Altgeräten sind zu beachten. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 57: Konfigurations-Software Ks2000
Busklemmen sowie Feldbus Box Module stehen spezifische Dialoge zur Verfügung, mit deren Hilfe die Einstellungen leicht modifiziert werden können. Alternativ haben Sie vollen Zugriff auf sämtliche internen Register. Die Bedeutung der Register entnehmen Sie bitte der Registerbeschreibung. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 58: Parametrierung Mit Ks2000
Klicken Sie auf den Button Login. Die Konfigurations-Software lädt nun die Informationen der angeschlossenen Feldbusstation. Im dargestellten Beispiel ist dies: • ein Buskoppler für Ethernet BK9000 • eine digitale Eingangsklemme KL1xx2 • eine einkanalige Schrittmotorklemme KL2531 • eine Bus-Endklemme KL9010 Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 59: Abb. 29 Darstellung Der Feldbusstation In Ks2000
Parameter sie verändern möchten (Im Beispiel Position 2). Abb. 30: KS2000 Baumzweige für Kanal 1 der KL2531 Für die KL2531 oder KL2541 werden die Baumzweige Register, Einstellungen und ProcData angezeigt: • Register [} 60] erlaubt den direkten Zugriff auf die Register der KL2531/KL2541. -
Seite 60: Register
Konfigurations-Software KS2000 Register Unter Register können Sie direkt auf die Register der KL2531/KL2541 zugreifen. Die Bedeutung der Register entnehmen Sie bitte der Registerübersicht [} 81]. Abb. 31: Registeransicht in KS2000 Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 61: Einstellungen 1
Konfigurations-Software KS2000 Einstellungen 1 Karteireiter Einstellungen 1 zur Parametrierung der KL2531 und KL2541 Abb. 32: Einstellungen über KS2000 Betriebsart: • Betriebsart (RP0.R32.4 [} 87], RP0.R32.3 [} 87]) Wählen Sie hier die Betriebsart [} 27] der Schrittmotorklemme aus: ◦ Geschwindigkeit, direkt ◦ Geschwindigkeit, mit Rampen ◦ Positionsnachführung ◦... - Seite 62 • max. Spulenstrom A (RP0.R35 [} 87]) Hier können Sie die Strombegrenzung für Wicklung A in 0 bis 100 % vom Nennstrom der Klemme festlegen (Default: 100%). KL2531-0000: 100% = 1,5 A KL2541-0000: 100% = 5,0 A • max. Spulenstrom B (RP0.R36 [} 88]) Hier können Sie die Strombegrenzung für Wicklung B in 0 bis 100 % vom Nennstrom der Klemme festlegen (Default: 100%).
- Seite 63 • Anzahl Impulse pro Umdrehung (Motor) (RP0.R51 [} 89]) Tragen Sie hier die Anzahl der Sensoren ein, mit der die Bewegung des Motors kontrolliert wird (Default: 1). Dieser Faktor geht mit in die Berechnung des Positionsfehlers ein. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 64: Einstellungen 2
Tragen Sie hier die Anzahl der Inkremente ein, die der an die KL2541 angeschlossene Encoder bei einer vollen Umdrehung ausgibt (Default: 4000). Einstellungen 2 Karteireiter Einstellungen 2 zur Parametrierung der KL2531 und KL2541 Abb. 33: Einstellungen 2 über KS2000 Referenzierung: Diese Parameter sind nur in der Betriebsart Fahrwegsteuerung verfügbar. - Seite 65 Hier können Sie die Beschleunigung vorgeben, die beim Anfahren auf Geschwindigkeit 0 benutzt wird (Default: 2047). • Beschleunigung 1 (RP3.R49 [} 94]) Hier können Sie die Beschleunigung vorgeben, die beim Anfahren auf Geschwindigkeit 1 benutzt wird (Default: 2047). usw. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 66: Einstellungen - Stromtabelle
Konfigurations-Software KS2000 Einstellungen - Stromtabelle Karteireiter Stromtabelle zur Parametrierung der KL2531 und KL2541. Abb. 34: Karteireiter Stromtabelle in KS2000 Die erste Viertelperiode kann in bis zu 64 Schritten vorgegeben werden. Für jeden Schritt können Sie mit den untenstehenden Auswahlfeldern einen Stromwert zwischen 0 und 15 vorgeben. - Seite 67 ◦ Die Anwender-Stromtabelle können Sie (bei Auswahl der Schrittweite 1/64) mit den untenstehenden Auswahlfeldern frei editieren. • neu Laden Liest die in der Klemme abgespeicherten Werte (RP1.R32 [} 91] bis RP1.R47 [} 91]) aus und zeigt sie • Sinus Gibt einen sinusförmigen Verlauf vor. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 68: Abb. 35 Kl2541 - Beispiele Für Einstellungen Der Stromtabelle Mit Ks2000
Konfigurations-Software KS2000 Beispiele Abb. 35: KL2541 - Beispiele für Einstellungen der Stromtabelle mit KS2000 Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 69: Einstellungen - Berechnungen
Dieser Dialog berechnet aus den Anwendungsparametern (u. A. Registerwerte der Schrittmotorklemme) die Motorparameter und stellt diese dann anschaulich dar. Diese Berechnungen stehen Ihnen auch als Excel Tabelle zur Verfügung. Zur Nutzung dieser Excel-Tabelle, muss in Excel die Ausführung von Makros erlaubt sein! Excel Tabelle (https://infosys.beckhoff.com/content/1031/kl2531_kl2541/Resources/ zip/3426289803.zip) Abb. 36: Registerkarte Berechnungen Anwendungsparameter: •... - Seite 70 Schrittweite kann vom Anwender ggf. vergrößert werden. Dabei muss aber beachtet werden, dass die Geschwindigkeitsvorgabe durch die Prozessdaten eine neue Berechnung erfordert. • Vollschrittwinkel Gibt den resultierenden Winkel für einen Vollschritt an. • Mikroschrittwinkel Gibt den resultierenden Winkel für einen Mikroschritt an. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 71: Einstellungen - Inbetriebnahme
3,812951 = SF x 32767 x 3,812951 (Siehe Kapitel Berechnung der Geschwindigkeit [} 28]) Einstellungen - Inbetriebnahme Karteireiter Inbetriebnahme zur Parametrierung der Schrittmotor-Ansteuerung durch die KL2531/2541. WARNUNG Manuelles Steuern des Schrittmotors Mit dieser Dialogmaske können Sie den Schrittmotor manuell steuern. -
Seite 72: Abb. 38 Schaltfläche Motor Aktivieren Und Motor Deaktivieren Im Registerreiter Inbetriebnahme
Das Status-Bit SB.6 [} 77] wird hier dargestellt. Im Fehlerfall erscheint nach klicken auf die Fehleranzeige ein Meldungsfenster, das die aufgetretenen Fehler im Klartext anzeigt. Abb. 41: Statusanzeige Fehler im Registerreiter Inbebriebnahme • Warnung Das Status-Bit SB.5 [} 77] wird hier dargestellt. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 73: Abb. 42 Einstellung Der Geschwindigkeit Im Registerreiter Inbetriebnahme
Hier können Sie den Maximalwert für die Geschwindigkeit vorgeben. Die Geschwindigkeit darf nicht größer als der vorgegebene Wert in der Registerkarte Berechnungen [} 69] werden und wird deshalb automatisch begrenzt! Dieser Wert kann im Betrieb verändert werden und wird ins RAM der Klemme eingetragen. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 74: Prozessdaten
Unter ProcData werden das Status-Byte (Status), das Control-Byte (Ctrl) und die Prozessdaten (Data) in einer Baumstruktur dargestellt. Abb. 44: Prozessdaten - Darstellung der Prozessdaten in der Baumstruktur Die Lesebrille markiert die Daten, die gerade im Feld Verlauf graphisch dargestellt werden. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... - Seite 75 Nehmen Sie nur Veränderungen an den Ausgangswerten vor, wenn Sie sich sicher sind, dass Ihr Anlagen- zustand dies erlaubt und keine Gefährdung von Mensch oder Maschine besteht! Nach Drücken der Schaltfläche Einstellungen können Sie die numerische Darstellungsform auf hexadezimal, dezimal oder binär einstellen. Abb. 48: Einstellung der Darstellungsform KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 76: Zugriff Aus Dem Anwenderprogramm
Auch wenn Sie Ihren Buskoppler auf kompaktes Prozessabbild einstellen, werden KL2531 und KL2541 mit ihrem kompletten Prozessabbild dargestellt! Die KL2531-0000 und KL2541-0000 stellen sich im Prozessabbild mit mindestens 5 Byte Ein- und 5 Byte Ausgangsdaten dar. Diese sind wie folgt aufgeteilt: Byte-0ffset (ohne Byte-0ffset (mit ... -
Seite 77: Control- Und Status-Byte
Lastwinkel (aktuelle mechanische Last am Motor, ist abhängig vom maximalen Spulenstrom und der aktuellen Geschwindigkeit) SB.1 SB.0 Ready Motoransteuerung ist gesperrt oder es liegt ein Fehler vor (SB.6=1) Motoransteuerung ist frei geschaltet und es ist kein Fehler aufgetreten (Quittung für Enable, SB.6=0) KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... - Seite 78 Das Status-Byte (SB) befindet sich im Eingangsabbild [} 76] und wird von der Klemme zur Steuerung übertragen. SB.7 SB.6 SB.5 SB.4 SB.3 SB.2 SB.1 SB.0 Name RegAccess Reg-Nr. Legende Name Beschreibung SB.7 RegAccess 1 Quittung für Registerzugriff SB.6 Lesezugriff SB.5 bis SB.0 Reg-Nr. Nummer des Registers, das gelesen oder beschrieben wurde. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 79: Control- Und Status-Wort
(in- internes Latchereignis ist freigeschaltet (bei steigender Flanke des C-Eingangs speichert die Klemme tern) die aktuelle Position) ACHTUNG: höhere Priorität als CW.1, CW.2, CW.3 und CW.4! ) Nur bei interner Positionierung ) Nur für KL2541 KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... - Seite 80 Status des digitalen Eingangs 2. Die Auswertung des digitalen Eingangs 2 kann mit Bit RP0.R52.15 [} 89] des Feature-Registers 2 invertiert werden. SW.0 Input 1 Status des digitalen Eingangs 1. Die Auswertung des digitalen Eingangs 2 kann mit Bit RP0.R52.14 [} 89] des Feature-Registers 2 invertiert werden. ) Nur in der Betriebsart Fahrwegsteuerung Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 81: Registerübersicht
Register-Page-Auswahlregister (Wertebereich: 0 0x0000 R4 [} 84] bis 2) Latch-Wert (höherwertiges Wort) R5 [} 84] Temperatur-Register z. B. 0x003C z. B. 60 R6 [} 85] Kommando-Register 0x0000 R7 [} 85] Klemmentyp KL2531: 0x09E3 2531 R8 [} 86] KL2541: 0x09ED 2541 Firmware-Stand z. B. 0x3141 z. B. 1A R9 [} 86] ASCII Multiplex-Schieberegister 0x0128 Signalkanäle... - Seite 82 RAM / R58 [} 90] EEPROM reserviert reserviert Setzen der Zielposition bzw. Position RAM / R62 [} 90] (niederwertiges Wort) für erweiteten Autostart EEPROM Setzen der Zielposition bzw. Position RAM / R63 [} 90] (höherwertiges Wort) für erweiteten Autostart EEPROM Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
- Seite 83 EEPROM R32 [} 93] Geschwindigkeit 1 0x07FF 2047 EEPROM EEPROM Geschwindigkeit 15 0x07FF 2047 EEPROM Beschleunigung 0 (Startwert für Register 40) 0x07FF 2047 EEPROM Beschleunigung 1 0x07FF 2047 EEPROM EEPROM Beschleunigung 15 0x07FF 2047 EEPROM R63 [} 94] KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
-
Seite 84: Registerbeschreibung
Hier können Sie das höherwertige Wort der gewünschten Position vorgeben (Maximum: 65535). R4: Register-Page-Auswahlregister Mit diesem Register legen Sie fest, welche Register-Page in die Register R32 bis R63 der KL2531/KL2541 eingeblendet wird: • 0x0000: Register-Page 0 [} 87] - weitere Klemmenparameter (default) •... - Seite 85 Motor ist bei Software-Reset ungebremst! Während eines Software-Resets wird der Motor stromlos geschaltet, d. h. die Motorachse kann sich frei drehen. Stellen Sie sicher dass ihr Anlagenzustand dies erlaubt und keine Gefährdung von Mensch oder Maschine besteht! KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
- Seite 86 Mit dem Eintrag 0x0540 wird das aktuell aktivierte Sonderkommando gestoppt. R8: Klemmentyp Im Register R8 steht die Bezeichnung der Klemme: KL2531: 0x09E3 (2531 KL2541: 0x09ED (2541 R9: Firmware-Stand Im Register R9 steht in ASCII-Codierung der Firmware-Stand der Klemme, z. B. 0x3141 = '1A'. Hierbei entspricht die '0x31' dem ASCII-Zeichen '1' und die '0x41' dem ASCII-Zeichen 'A'.
-
Seite 87: Register-Page 0 (Anwender-Parameter)
Umdrehung ausgibt (Default: 4000). R35: maximaler Spulenstrom A Dieses Register legt die Strombegrenzung für Wicklung A fest (Angabe in 0 bis 100 % vom Nennstrom der Klemme): KL2531-0000: 100% = 1,5 A KL2541-0000: 100% = 5,0 A KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... - Seite 88 R36: maximaler Spulenstrom B Dieses Register legt die Strombegrenzung für Wicklung B fest (Angabe in 0 bis 100 % vom Nennstrom der Klemme): KL2531-0000: 100% = 1,5 A KL2541-0000: 100% = 5,0 A R37: Anzahl Latch-Werte Dieses Register legt die Anzahl der gespeicherten Latch-Werte fest (Default: 20, Maximum: 20).
- Seite 89 HIGH-Pegel = aktiver Zustand (SW.0 [} 80]=1 digitalen Eingang 1 als Öffner auswerten: LOW-Pegel = aktiver Zustand(SW.0 [} 80]=1 R52.13 enManEnc Tolerance Die Toleranz der Zielposition bildet sich aus dem Quotienten der Register Die KL2531 (nur KL2541) wertet die- R34 [} 87] / R33 [} 87] (Positionsrückführung mit Encoder). ses Bit nicht Die Toleranz der Zielposition wird durch Register R57 [} 90] vorgegeben aus! R52.12 enClrProcess Data...
- Seite 90 R63: Setzen der Zielposition bzw. Position (höherwertiges Wort) für erweiterten Autostart Hier können Sie das höherwertige Wort der gewünschten Position vorgeben (Maximum: 65535). Ohne Codewort wird dieser Wert in das RAM geschrieben, mit Codewort in das EEPROM. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 91: Register-Page 1 (Anwender-Stromtabelle)
Dieses Register gibt die Stromwerte 60, 59, 58 und 57 vor (Aufbau wie Stromwerte 4 bis 1 [} 91]). R47: Stromwerte 64 bis 61 Dieses Register gibt die Stromwerte 64, 63, 62 und 61 vor (Aufbau wie Stromwerte 4 bis 1 [} 91]). KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... -
Seite 92: Register-Page 2 (Anwender-Positionstabelle)
Dieses Register gibt das niederwertige Wort der Zielposition 9 vor. R51: Zielposition 9 (höherwertiges Wort) Dieses Register gibt das höherwertige Wort der Zielposition 9 vor. R52: Zielposition 10 (niederwertiges Wort) Dieses Register gibt das niederwertige Wort der Zielposition 10 vor. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541... -
Seite 93: Register-Page 3 (Anwender-Geschwindigkeits- Und Beschleunigungstabelle)
Dieses Register gibt die Geschwindigkeit 5 vor. R38: Geschwindigkeit 6 Dieses Register gibt die Geschwindigkeit 6 vor. R39: Geschwindigkeit 7 Dieses Register gibt die Geschwindigkeit 7 vor. R40: Geschwindigkeit 8 Dieses Register gibt die Geschwindigkeit 8 vor. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... - Seite 94 Dieses Register gibt die Beschleunigung 12 vor. R61: Beschleunigung 13 Dieses Register gibt die Beschleunigung 13 vor. R62: Beschleunigung 14 Dieses Register gibt die Beschleunigung 14 vor. R63: Beschleunigung 15 Dieses Register gibt die Beschleunigung 15 vor. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 95: Beispiele Für Die Register-Kommunikation
Byte 2: DataOUT1, Low-Byte 0xDF (1101 1111 0x12 0x35 Erläuterung: • Bit 0.7 gesetzt bedeutet: Register-Kommunikation eingeschaltet. • Bit 0.6 gesetzt bedeutet: schreiben des Registers. • Bit 0.5 bis Bit 0.0 geben mit 01 1111 die Registernummer 31 an. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0... - Seite 96 • Bit 0.6 gesetzt bedeutet: schreiben des Registers. • Bit 0.5 bis Bit 0.0 geben mit 10 0000 die Registernummer 32 an. • Das Ausgangsdatenwort (Byte 1 und Byte 2) enthält den neuen Wert für das Feature-Register. Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
- Seite 97 Byte 2: DataOUT1, Low-Byte 0xDF (1101 1111 0x00 0x00 Erläuterung: • Bit 0.7 gesetzt bedeutet: Register-Kommunikation eingeschaltet. • Bit 0.6 gesetzt bedeutet: schreiben des Registers. • Bit 0.5 bis Bit 0.0 geben mit 01 1111 die Registernummer 31 an. KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
- Seite 98 • Die Klemme liefert im Status-Byte als Quittung einen Wert zurück der sich nur in Bit 0.6 vom Wert des Control-Bytes unterscheidet. • Das Eingangsdatenwort (Byte 1 und Byte 2) ist nach dem Schreibzugriff ohne Bedeutung. Eventuell noch angezeigte Werte sind nicht gültig! Version: 2.2.0 KL2531/KS2531, KL2541/KS2541...
-
Seite 99: Anhang
Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Niederlassungen und Vertretungen Wenden Sie sich bitte an Ihre Beckhoff Niederlassung oder Ihre Vertretung für den lokalen Support und Service zu Beckhoff Produkten! Die Adressen der weltweiten Beckhoff Niederlassungen und Vertretungen entnehmen Sie bitte unseren Internetseiten: https://www.beckhoff.de... - Seite 100 Abb. 20 Anschluss einer Leitung an eine Klemmstelle ................Abb. 21 KL2531-0000 - Anschluss......................Abb. 22 KL2531 - Bipolare Ansteuerung seriell (links) und parallel (rechts) eines bipolaren Motors ..Abb. 23 KL2531 - Bipolare Ansteuerung eines unipolaren Motors ............Abb. 24 KL2541-0000 - Anschluss......................
- Seite 101 Abb. 45 Verlauf - graphischer Verlauf der in Prozessdaten mit der Lesebrille markierten Daten ..... Abb. 46 Wert - Anzeige der Eingangswerte ....................Abb. 47 Wert - Veränderung der Ausgangswerte ..................Abb. 48 Einstellung der Darstellungsform....................KL2531/KS2531, KL2541/KS2541 Version: 2.2.0...
- Seite 103 Mehr Informationen: www.beckhoff.de/KL2531 Beckhoff Automation GmbH & Co. KG Hülshorstweg 20 33415 Verl Deutschland Telefon: +49 5246 9630 info@beckhoff.de www.beckhoff.de...