Joy-it Robot02 Bedienungsanleitung

Verwandte Anleitungen für Joy-it Robot02





Inhaltszusammenfassung für Joy-it Robot02
- Seite 1 Roboter-Arm-Bausatz Python-Code-Beispiel mit dem Joy-IT MotoPi Ausgabe 30.08.2017 Copyright by Joy-IT...
- Seite 2 Robot 02 - Codebeispiel Index Einführung & allgemeine Hinweise Benötigte Komponenten für dieses Codebeispiel Aufbau des Roboterarms Installation der zusätzlichen Bibliothek Ausführung des Codes Service & Kontakt Ausgabe 30.08.2017 Copyright by Joy-IT...
-
Seite 3: Sicherheitshinweise
Ort auf. Sichern Sie den Roboterarm vor Nutzung durch Unbefugte. • Vermeiden Sie, dass die Motoren unter Belastung zum Stillstand kommen. • Halten Sie Ihre Hände, oder sonstige Gegenstände, während das Gerät in Betrieb ist, nicht in die Betriebszone. Ausgabe 30.08.2017 Copyright by Joy-IT... - Seite 4 Bei Überlastung können Netzteile sich stark erhitzen und Spannungsschwankungen erzeugen die zu Beschädigung der restlichen Hardware führen können. • Bei Veränderungen des Arms oder das hinzufügen von eigenen Komponenten, werden Sie selbst zum Hersteller und müssen geeignete Sicherheitsmaßnahmen treffen damit Niemand zu Schaden kommen kann. Ausgabe 30.08.2017 Copyright by Joy-IT...
-
Seite 5: Einführung & Allgemeine Hinweise
Lassen Sie, zu Ihrer eigenen Sicherheit, die Joysticks stets angeschlossen. 2. Benötigte Komponenten für dieses Codebeispiel Das von uns vorbereitete Codebeispiel erlaubt Ihnen einen Einblick in die Möglichkeiten unseres Joy-IT Roboterarm-Bausatzes zu erhalten. Neben den Roboterarm an sich, werden noch folgende zusätzliche Komponenten benötigt, damit Sie unser Codebeispiel abbilden können:... - Seite 6 Schließen Sie den aktuell zu verbauenden Servomotor an seiner jeweiligen Position am MotoPi an. Die Positionen für die Servomotoren sind aus den unten aufgezeigten Bild zu entnehmen Beispiel: Drehteller-> Servomotor 0 -> Ausgang MotoPi Channel 0 Ausgabe 30.08.2017 Copyright by Joy-IT...
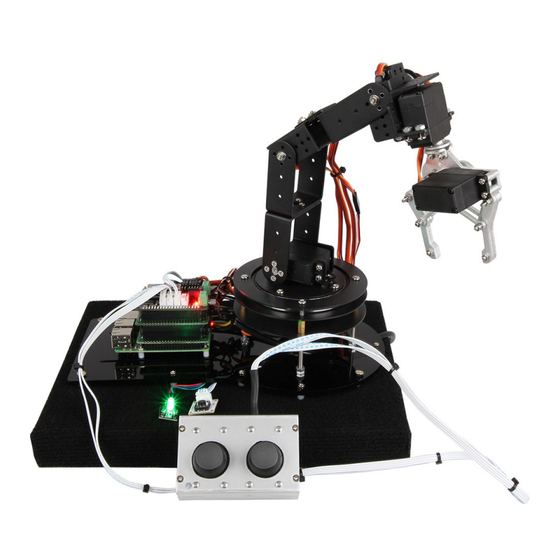
- Seite 7 Bildern ausgerichtet und fixiert werden. Gehen Sie schrittweise den Aufbau des Roboterarm von Servomotor zu Servomotor durch, bis Ihr Aufbau dem letzten Bild (mit dem komplett aufgebauten Arm mit Kralle) entspricht. Servomotor 0 und 1 Ausgabe 30.08.2017 Copyright by Joy-IT...
- Seite 8 Robot 02 - Codebeispiel Servomotor 2 Ausgabe 30.08.2017 Copyright by Joy-IT...
- Seite 9 Robot 02 - Codebeispiel Servomotor 3 Ausgabe 30.08.2017 Copyright by Joy-IT...
- Seite 10 Robot 02 - Codebeispiel Servomotor 4 Ausgabe 30.08.2017 Copyright by Joy-IT...
- Seite 11 Robot 02 - Codebeispiel Servomotor 5 und Peripherie Ausgabe 30.08.2017 Copyright by Joy-IT...
- Seite 12 (mit gemeinsamer Kathode) oder 3 einzelne LEDs am MotoPi angeschlossen werden—Mit diesem kann dann der Modus ausgegeben werden, in dem sich der Robo- terarm befindet. Diese werden an den Signalausgängen mit den Nummern 9,10 und 11 angeschlossen Ausgabe 30.08.2017 Copyright by Joy-IT...
-
Seite 13: Installation Der Zusätzlichen Bibliothek
Sie können das Codebeispiel nun mit dem folgenden Befehl ausführen. Achten Sie bitte darauf, dass der Roboterarm vorher unbedingt vollständig zusammengebaut und kalibriert sein sollte. Außerdem sollten alle Bauteile angeschlossen und funktionsbereit sein. sudo python RoboterArm.py Ausgabe 30.08.2017 Copyright by Joy-IT... -
Seite 14: Service & Kontakt
Aktuelle Downloads finden Sie unter http://anleitung.joy-it.net http://downloads.joy-it.net Konformitätserklärung Als Hersteller erklären wir, die Joy-IT Europe GmbH, dass unser Produkt Robot02 bei bestimmungsgemäßer Verwendung die grundlegenden Anforderungen der folgenden Richtlinien erfüllt: EMV-Richtlinie 2014/30/EU RoHS-Richtlinie 2011/65/EU Die ausführliche Konformitätserklärung können Sie bei uns unter der folgenden Adresse anfordern: JOY-iT Europe GmbH , Pascalstr.