Inhaltsverzeichnis
Werbung
Werbung
Inhaltsverzeichnis

Verwandte Anleitungen für Joy-it JOY-CAR

Inhaltszusammenfassung für Joy-it JOY-CAR
- Seite 1 JOY-CAR Educationroboter auf micro:bit Basis WWW.JOY-IT.NET...
- Seite 2 INHALTSVERZEICHNIS BAUTEILE TRAINING CHASSIS SENSOREN ELEKTRONIK KOMMUNIKATION MONTAGE-MATERIAL DETAILS MONTAGE QUAL DER WAHL MAKECODE MONTAGE DER BODENGRUPPE EINFÜHRUNG MONTAGE DES ANTRIEBSSTRANGS DER ERSTE START MONTAGE DER ELEKTRONIK JOY-CAR DIE ERWEITERUNG MONTAGE DES CHASSIS-AUFSATZES DAS VOLLE PROGRAMM ULTRASCHALL- ALTERNATIVMONTAGE ANSCHLUSSVERKABELUNG...
- Seite 3 MICROPYTHON EINFÜHRUNG INTERFACE DER ERSTE START CODE LOSLEGEN SUPPORT...
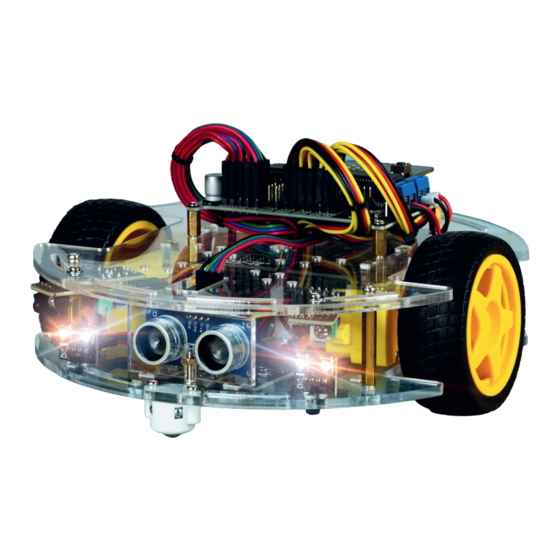
- Seite 4 JOY-CAR Das Joy-Car ist ein modular aufgebautes Robotik- Lernkit, welches zum Erlernen der Baugruppen und deren Funktionen als ganze Maschine dient. Die detaillierte Anleitung und die Programmierung machen das Lernen besonders einfach. Das Joy- Car verfügt über Sensoren wie z. B. Line Finder- Sensoren und einen Ultraschall-Sensor sowie über...
- Seite 5 BAUTEILE Willkommen bei deinem eigenen Joy-Car-Bausatz! Es gibt vieles zu entdecken, doch auf diese Reise musst du nicht alleine gehen. In den folgenden Kapiteln zeigen wir dir Schritt für Schritt, wie du aus deinem Bausatz dein eigenes, fahrbares Projekt kreierst.
- Seite 6 CHASSIS BATTERIE- BODENGRUPPE PARKHALTERUNG A HALTERUNG C PARKHALTERUNG B CHASSIS-AUFSATZ MOTORHALTERUNG BATTERIE- ULTRASCHALL- SERVOHALTERUNG HALTERUNG A HALTERUNG BATTERIE- ABSTANDSHALTER HALTERUNG B...
-
Seite 7: Mainboard
ELEKTRONIK LINETRACKING- MAINBOARD BATTERIEFACH SENSOR 3-PIN DUPONT- LED BOARD HINDERNISSENSOR KABELSATZ 4-PIN DUPONT- SPEEDSENSOR SERVOMOTOR KABELSATZ MICRO:BIT ULTRASCHALL- MOTOR SENSOR NICHT IN ALLEN JOY-CAR-SETS ENTHALTEN! - Seite 8 MONTAGE- MATERIAL SCHRAUBE SCHRAUBE ABSTANDSHALTER 4x M2,5 x 5 mm 5x M3 x 14 mm 4x M2,5 x 10 mm SCHRAUBE UNTERLEGSCHEIBE ABSTANDSHALTER 12x M2,5 x 10 mm 30x M2,5 4x M3 x 30 mm SCHRAUBE MUTTER GLEITKUGEL 4x M2,5 x 22 mm 20x M2,5 SCHRAUBE MUTTER...
- Seite 9 Aber keine Sorge! Auch wenn es viele Bauteile, Module und Kabel gibt, lassen wir dich nicht am Straßenrand stehen. In diesem Kapitel zeigen wir dir Schritt für Schritt wie du dein Joy-Car zusammensetzt. Du wirst sehen, es ist leichter als gedacht und so lernst du alle Einzelheiten des...
-
Seite 10: Anschlüsse
BODENGRUPPE ANTRIEBS- STRANG MONTAGE DER BODENGRUPPE ELEKTRONIK Als Erstes erfolgt die Montage der Bodengruppe. Hier werden zunächst alle Halterungen und Abstandshalter angebracht, die im weiteren Verlauf des Aufbaus benötigt werden. CHASSIS- ACHTUNG! Alle Acrylteile sind mit einer Schutzfolie beklebt. Diese solltest du vor der Montage entfernen. - Seite 11 1. ABSTANDSHALTER ANBRINGEN Bringe zunächst die 4 Abstandshalter (M3 x 30 mm) an der Bodengruppe an und sichere diese von unten mit den passenden Muttern (M3). 2. ULTRASCHALL-HALTERUNG ANBRINGEN Bring nun die Ultraschall-Halterung an der Bodengruppe an. Sichere die Halterung von unten mit der passenden Schraube (M3 x 14 mm) und der entsprechenden Mutter (M3).
- Seite 12 3. GLEITKUGELN MONTIEREN Bringe nun die Gleitkugeln an der Bodengruppe an und befestige sie von oben mit den entsprechenden Schrauben (M2,5 x 10 mm). ACHTUNG! Verwende zur Montage der Gleitkugel an der Hinter- achse zusätzlich den Abstandshalter. 4. BATTERIEHALTERUNG ANBRINGEN Nimm die Batteriehalterung A und lege diese auf die Ober- seite der Bodengruppe.
- Seite 13 BODENGRUPPE ANTRIEBS- STRANG ELEKTRONIK MONTAGE DES ANTRIEBSSTRANGS Im nächsten Schritt setzen wir den Antriebsstrang zusammen und montieren die- sen auf dem Joy-Car. Der Antriebsstrang beinhaltet die Motoren und ist somit für den Vortrieb des Joy-Cars zuständig. CHASSIS- AUFSATZ ULTRASCHALL ALTERNATIVMONTAGE ANSCHLÜSSE...
- Seite 14 1. MOTOREN VORMONTIEREN Setze die beiden Motoren in die Führungen der Motor- halterungen ein und befestige sie mit den passenden Schrauben (M2,5 x 22 mm) und Muttern (M2,5). Verwende zusätzlich pro Schraube jeweils zwei Unterlegscheiben (M2,5), eine am Schraubenkopf und eine am Schraubenende. Stecke anschließend die schwarze Lochscheibe auf die Innenseite des Motors.
- Seite 15 BODENGRUPPE ANTRIEBS- STRANG ELEKTRONIK MONTAGE DER ELEKTRONIK Als nächstes setzen wir alle elektronischen Bauteile in die Bodengruppe ein. Dazu zählen nicht nur die einzelnen Sensoren, sondern auch die LED-Module, welche als Scheinwerfer zum Einsatz kommen. CHASSIS- AUFSATZ ULTRASCHALL ALTERNATIVMONTAGE ANSCHLÜSSE ABSCHLUSS...
- Seite 16 1. SCHEINWERFER VORNE Setze nun die WS2812B LED-Scheinwerfer-Module in die Front der Bodengruppe ein. Befestige diese mit den beiliegenden Kabel- bindern. Du kannst einfach jeweils einen Kabelbinder durch die Öffnung in den Scheinwerfern und durch die Öffnungen in der Bodengruppe führen und diese dann festziehen. KABELBINDER DURCH ÖFF-...
- Seite 17 3. LINETRACKING-SENSOREN Bring die Linetracking-Sensoren auf der Unterseite der Boden- gruppe mit den passenden Schrauben (M2,5 x 10 mm) und Muttern (M2,5) an. Verwende zusätzlich pro Schraube jeweils 2 Unterleg- scheiben (M2,5). 4. SPEED-SENSOREN Setze die Speed-Sensoren auf der Unterseite der Bodengruppe ein.
- Seite 18 5. ULTRASCHALL-SENSOR Setze den Ultraschall-Sensor in die Halterung ein. Bei Bedarf kann dieser mit etwas Klebstoff zusätzlich befestigt werden. Die vier Anschlüsse des Sensors sollten dabei nach oben zeigen. ACHTUNG! Solltest du dich im 2. Arbeitsschritt der Montage der Bodengruppe dazu entschieden haben, den Ultraschall-Sensor auf einem beweglichen Servo zu montieren, so musst du diesen Schritt überspringen.
- Seite 19 BODENGRUPPE ANTRIEBS- STRANG MONTAGE DES CHASSIS-AUFSATZES ELEKTRONIK Die Bodengruppe ist soweit fertig zusammengesetzt, daher kümmern wir uns nun um den Chassis-Aufsatz. DIeser beinhaltet, neben der Mainboard-Halterung, auch die Hindernis-Sensoren. CHASSIS- AUFSATZ ULTRASCHALL ALTERNATIVMONTAGE VERKABELUNG ABSCHLUSS...
- Seite 20 1. ABSTANDSHALTER ANBRINGEN Bringe die 4 Abstandshalter (M2,5 x 10 mm) am Chassis-Aufsatz an und sichere diese von unten mit den passenden Muttern (M2,5). ACHTUNG! Achte darauf, dass sich die beiden markierten Löcher auf der in Fahrtrichtung linken Seite befinden. 2.
- Seite 21 BODENGRUPPE ANTRIEBS- STRANG ULTRASCHALL-ALTERNATIVMONTAGE ELEKTRONIK Der Ultraschall-Sensor lässt sich alternativ auch auf dem Chassis-Aufsatz montieren. Hier wird er zusätzlich mit einem Servomotor montiert und bietet damit einen größeren Messbereich. Solltest du diese Variante bevorzugen und die Montage auf der Bodengruppe übersprungen haben, kannst du mit diesem Kapitel fortfahren.
- Seite 22 1. SERVOARM ANBRINGEN Setze den länglichen Servoarm auf den Getriebekopf des Motors. Fixiere diesen nun mit der dem Motor beiliegenden Schraube. 2. SERVOMOTOR EINSETZEN Setze nun den Servomotor mit dem Kabel voran in die Aussparung des Chassis-Aufsatzes ein. Befestige ihn am Chassis mit den dem Motor beiliegenden Schrauben.
- Seite 23 3. ULTRASCHALL-HALTERUNG ZUSAMMENSETZEN Setze nun die Ultraschall-Halterung auf die Servohalterung und verschraube diese mit der passenden Schraube (M3 x 14 mm) und der entsprechenden Mutter (M3). 4. ULTRASCHALL-HALTERUNG MONTIEREN Platziere nun die Ultraschall-Halterung auf dem Servoarm und befestige diese mit den bei- liegenden Kabelbindern.
- Seite 24 BODENGRUPPE ANTRIEBS- STRANG ANSCHLUSSVERKABELUNG ELEKTRONIK Nun ist es an der Zeit die Elektronik mit dem Mainboard des Joy-Cars zu verkabeln. ACHTUNG! Mainboard, Chassis-Aufsatz und Bodengruppe sind noch nicht miteinander verschraubt. Dennoch ist es jetzt am einfachsten die Kabel anzu- schließen und zu verlegen und erst danach die drei Einheiten fest miteinander zu verbinden.
- Seite 25 1. LINETRACKING-SENSOREN VERKABELN Die drei Linetracking-Sensoren werden nun mit jeweils einem Drei-Pin-Kabel verbunden. Das andere Ende der Kabel kann L M R dann durch die Öffnungen in der Bodengruppe und des Chassis-Aufsatzes geführt und, wie unten zu sehen, am Board des Joy- Cars angeschlossen werden.
- Seite 26 2. GESCHWINDIGKEITS-SENSOREN VERKABELN Auch die beiden Geschwindigkeits-Sensoren werden mit jeweils einem Drei-Pin-Kabel verbunden und mit dem Board des Joy- Cars verbunden.
- Seite 27 3. SCHEINWERFER VERKABELN Die vier Scheinwerfer-Module werden mit jeweils einem Vier-Pin-Kabel verbunden und auf das Mainboard des Joy-Cars geführt.
- Seite 28 4. ULTRASCHALL-SENSOR VERKABELN Der Ultraschall-Sensor wird ebenfalls mit einem Vier-Pin-Kabel mit dem Mainboard verbunden.
- Seite 29 5. MOTOREN VERKABELN Die beiden Motoren sind bereits mit jeweils zwei Kabeln vorverkabelt. Diese werden zu den seitlichen Verbindern auf dem Board des Joy-Cars geführt. Du benötigst hier einen Schraubendreher, um die Klemmen zu lösen und wieder zu befestigen, MOT_L MOT_R nachdem du die Kabel eingesteckt hast.
- Seite 30 6. BATTERIEFACH VERKABELN Das Batteriefach ist, genau wie die Motoren zuvor, ebenfalls mit zwei Kabeln vorverkabelt. Auch diese werden in den entsprechenden Klemmen auf dem Board des Joy-Cars befestigt. Hierbei ist das rote Kabel für die „+“-Klemme und das schwarze Kabel für die „-“-Klemme vorgesehen.
- Seite 31 7. HINDERNIS-SENSOREN VERKABELN Die beiden Hindernis-Sensoren haben zwar vier Pin-Leisten ausgeführt, benötigen jedoch nur drei Kabel. Sie werden daher auch nur mit jeweils einem Drei-Pin-Kabel angeschlossen und zum Board geführt. ACHTUNG! Die Empfindlichkeit der Sensoren kann zusätzlich justiert werden. Die hierfür nötigen Details findest du hier.
- Seite 32 8. OPTIONAL: SERVO-MOTOREN VERKABELN Solltest du den Ultraschall-Sensor in der Alternativmontage mit einem Servo-Motor montiert haben, so wird dieser nun mit einem Drei-Pin-Kabel am ersten Servo-Anschluss angeschlossen. Auch ein zweiter Servo-Motor, der für eine individuelle Programmierung genutzt werden kann, kann optional nun mit ange- schlossen werden.
- Seite 33 BODENGRUPPE ANTRIEBS- STRANG ELEKTRONIK ABSCHLUSS Du hast es fast geschafft! Da nun alles montiert und verkabelt ist, setzen wir nun nur noch den Chassis-Aufsatz auf die Bodengruppe, verschrauben das Mainboard und setzen den micro:bit ein. CHASSIS- AUFSATZ ULTRASCHALL ALTERNATIVMONTAGE ANSCHLÜSSE ABSCHLUSS...
- Seite 34 1. HOCHZEIT Da nun alle Sensoren montiert und alle Kabel angeschlossen sind, kann der Chassis-Aufsatz mit der Bodengruppe verheira- tet werden. Setze dazu den Chassis-Aufsatz auf die Bodengrup- pe auf und verschraube ihn an den vier Abstandshaltern mit den entsprechenden Schrauben (M3 x 8 mm) 2.
- Seite 35 3. MICRO:BIT EINSETZEN Schiebe nun deinen micro:bit in die Halterung des Mainboards ein. Achte darauf, dass dabei die beiden Knöpfe des micro:bits nach oben zeigen. ACHTUNG! Je nach Ausführung ist der micro:bit im Set nicht enthalten und muss zusätzlich erworben werden. 4.
- Seite 36 4. JOY-CAR AUFSETZEN Du kannst das Joy-Car auf die Parkhalterungen aufsetzen, wenn du z.B. die Motoren programmierst. So fährt das Joy-Car nicht sofort davon, wenn du deinen Code ausprobierst. Die Montage deines Joy-Cars ist nun abgeschlossen. Du kannst nun entweder mit dem ...
- Seite 37 Du bist dir noch immer unsicher was die Verkabelung deines Joy-Cars angeht? Du weißt noch immer nicht so recht, wo lang du die Kabel führen sollst und irgendwie sieht alles nicht richtig aus? Schau dir doch an unserer Beispielverkabelung ab, wie du die Kabel am besten führen kannst und an welchen Stellen du sie mit Kabelbindern befestigen kannst, damit auch die Verkabelung deines Joy-Cars einen guten Eindruck macht.
- Seite 38 TRAINING Dein Joy-Car ist zusammengebaut und frisch poliert? Super! Doch los- fahren kannst du noch nicht. In diesem Kapitel gehen wir ins Detail und erklären dir die Module, wie diese funktionieren und wie sie mit deinem Joy- Car kommunizieren. Für eigene Projekte wird dir dieses Wissen weiterhelfen! Du kannst nicht warten und möchtest lieber direkt loslegen? Überspringe...
- Seite 39 SENSOREN ULTRASCHALL-SENSOR Der Ultraschall-Sensor kann beim Joy-Car zur Erkennung von Objekten und Hindernissen in einem Entfernungsbereich zwischen 2 und 300 cm genutzt werden. So kann auch in größerer Entfernung einem Hindernis ausgewichen oder sogar auf dieses zugesteuert werden. Der Ultraschall-Sensor ist dazu in der Lage, Entfernungen präzise zu messen, indem er hochfrequente Schallimpulse aussendet.
- Seite 40 IR-LICHT WIRD VON NAHE GELEGENEM OBJEKT IR-LICHT WIRD VON SCHWARZEM IR-LICHT WIRD VOM WEISSEM UNTERGRUND ÖFFNUNGEN IN DER LOCHSCHEIBE REFLEKTIERT UNTERGRUND NICHT REFLEKTIERT, JOY-CAR REFLEKTIERT UND VOM SENSOR ERKANNT. RICH- KANN GERADE AUS FAHREN UM ZU FOLGEN TUNG MUSS KORRIGIERT WERDEN UM ZU FOLGEN...
- Seite 41 Stelle nun dein Joy-Car abwechselnd auf das Blatt Papier und auf den schwarzen Klebestreifen. Deine Sen- soren sind richtig eingestellt, wenn die LED auf jedem Sensor aufleuchtet, wenn das Joy-Car auf dem Blatt Papier steht und wenn die LEDs wieder erlischen, sobald du das Joy-Car auf den Klebestreifen stellst.
- Seite 42 Gerät , dem micro:bit (Master) gesteuert und alle anderen Geräte warten dabei nur auf ihre Sendeerlaubnis und werden daher Slave genannt. I2C kommt beim Joy-Car für die Kommunikation und Ansteuerung der Infrarot-Sensoren (IO Expander) und der Motor- Steuerungseinheit (PWM-Controller) zum Einsatz.
- Seite 43 PWM steht für „Pulse Width Modulation“ bzw. Pulsweitenmodulation. Bei diesem Verfahren wird das Verhältnis von der Einschaltzeit zur festgelegten Periodendauer variiert. Die Pulsweitenmodulation wird genutzt um Verbraucher, wie z. B. Motoren oder LEDs in der Geschwindigkeit oder in der Helligkeit zu steuern. Die dauer einer Periode liegt in der Regel bei einigen wenigen Millisekunden oder weniger.
- Seite 44 Beim Joy-Car ist diese LED Kette so gelöst worden, dass 2 WS2812B LEDs auf einem Scheinwerfermodul montiert sind. Diese beiden LEDs sind schon auf der Platine mit der Busleitung verbunden. Bei den Anschlusspins der Platine gibt es einen „Din“...
- Seite 45 IO-EXPANDER Der IO-Expander ist an deinem Joy-Car eine zentrale Einheit, an dem die meisten Sensoren angeschlossen sind. Da der micro:bit nicht über genügend Eingänge für alle Sensoren verfügt werden diese an den IO-Expander angeschlossen. Dieser kommuniziert dann mit dem micro:bit über die I2C Schnittstelle. Auf diese Weise werden lediglich zwei Ports des micro:bits belegt.
- Seite 46 Mainboards aktivieren. So kannst du dir zwei weitere Pins für deine eigene Entwicklung aktivieren, falls du sie benötigst. ON/OFF Um dein Joy-Car ein- bzw. auszuschalten musst du nicht immer wieder die Batterien einlegen bzw. herausnehmen. Du kannst die Spannungsversorgung bequem über den Ein/Aus-Schalter trennen. ON/OFF...
- Seite 47 ENERGIEVERSORGUNG In der Montageanleitung hast du bereits erfahren, dass du die Batteriehalterung an dem BAT-Terminal anschließen kannst. Solltest du dennoch einmal eigene Modifikationen vornehmen, bist du nicht an die Batteriehalterung gebunden. Hier ist es gut zu wissen: An dem BAT-Terminal kannst du eine beliebige Spannungsquelle zwischen 4,5-9 V anschließen.
- Seite 48 ALLES AM RECHTEN FLECK Das Mainboard des Joy-Cars bildet natürlich nur die Verbindungseinheit zwischen den einzelnen Sensoren und Modulen und dem micro:bit. Du möchtest wissen, wo und wie die einzelnen Einheiten mit dem micro:bit in Verbindung stehen? Oder vielleicht möchtest du sogar selbst Änderungen vornehmen? Auf unserer schematischen Abbildung haben wir alle Einheiten zusammengefasst und zeigen dir, wie sie vom Micro:Bit angesteuert werden.
-
Seite 49: Qual Der Wahl
Lichtelemente eines Autos nachbilden (z. B. Abblendlicht, Fernlicht, Bremslicht, Blinker, etc.). Des Weiteren hat das Joy-Car mit dem Buzzer eine (Mehrton-) Hupe an Board. Aber auch Sensoren, wie z. B. den Ultraschallsensor, findet man in heutigen Autos. Du möchtest kein Auto nachbauen sondern dir ein bunt blinkendes Spaßmobil programmieren? Keine Sorge, auch das ist möglich. -
Seite 50: Einführung
Hindernis erkannt wird: Du kennst dich bereits aus? Du hast keine Lust auf Erklärungen? Du willst lieber direkt losfahren, anstatt dir dein Joy-Car selbst zu entwickeln? HIER erfährst du direkt, wie du mit unserer für dich entwickelten Programmierung sofort starten... - Seite 51 EIN NEUER START 論 Jedes Projekt besteht zu Beginn aus zwei Grundblöcken. Dem „beim Start“-Block und dem „dauerhaft“-Block. Alle Anweisungen, die sich innerhalb dieser beiden Blöcke befinden, werden vom Programm ausgeführt. Dabei wird jedoch der „beim Start“-Block lediglich einmalig ausgeführt, sobald du dein Programm startest. Der „dauerhaft“-Block hingegen wird immer und immer wieder ausgeführt.
- Seite 52 IMMER UND IMMER WIEDER... Auch Schleifen lassen sich mit den Blöcken problemlos abbilden. Hier kannst du beispielsweise etwas so lange ausführen lassen, bis die Bedingung nicht mehr erfüllt ist („während“-Block) oder etwas auf Basis einer bestimmten Anzahl wieder- holen („x-mal wiederholen“-Block). AUF DER SUCHE! Im linken Bereich deines Projektfensters findest du auch die Blockübersicht, mit allen Blöcken, die dir zur Verfügung stehen.
-
Seite 53: Der Erste Start
DER ERSTE START EIN NEUES KAPITEL Du hast noch keine Erfahrungen mit der MakeCode-Entwicklungsumgebung gesammelt, möchtest aber gerne mit einem kleinen Beispiel starten? Wir bringen dir die Umgebung näher! Auf HTTPS://MAKECODE.MICROBIT.ORG/ gelangst du zur Entwicklungsumgebung. Hier gehts los, sobald du die Seite betrittst. Im mittleren Bereich der Seite werden dir all deine Projekte auf- gelistet. - Seite 54 Du musst deinem neuen Projekt nur einen Namen geben und schon kann es los gehen. GIB HIER DEINEM PROJEKT EINEN NAMEN BESTÄTIGE DANACH DEINE EINGABE Als nächstes startest du direkt in der Entwicklungsum- gebung und kannst dir deine ersten Blöcke zusammen- stellen.
- Seite 55 Du wirst sehen, dass sich die Blockübersicht vergrößert hat und sich die Kategorie, die du gerade angeklickt hast, geöffnet hat. NIMM DEN „ZEIGE LEDS“-BLOCK UND ZIEHE IHN MIT DEINER MAUS EINFACH IN DEN „BEIM START“-AUSFÜHRUNGS-BLOCK Du kannst die einzelnen Kästchen anklicken und somit einstellen, welche der LEDs aktiviert werden sollen.
- Seite 56 Doch das war nur der Teil, der einmalig beim Start aus- geführt wird. Ziehe jetzt aus der Grundlagen-Kategorie den „zeige Text“-Block und einen „pausiere“-Block in deinen „dauerhaft“-Ausführ-Block. NIMM DEN „ZEIGE LEDS“-BLOCK UND ZIEHE IHN MIT DEINER MAUS EINFACH IN DEN „BEIM START“-AUSFÜHRUNGS-BLOCK Du kannst den Text und auch die Dauer der Pause zu- sätzlich ändern, indem du auf die weißen Felder klickst.
- Seite 57 Dein erster Beispielcode ist fertig und kann jetzt auf dei- nen micro:bit übertragen werden. Schließe dazu zuerst deinen micro:bit an deinen Com- puter an. In den meisten Fällen sollte dein micro:bit au- tomatisch erkannt und gekoppelt werden, sodass dein Code bequem direkt auf dein Gerät geladen wird. KLICKE HIER FÜR DIE AUTOMATISCHE ÜBERTRAGUNG.
- Seite 58 Auch wenn möglicherweise der Browser deinen micro:bit nicht erkannt hat, so sollte er in deinem Win- dows-Explorer dennoch als Laufwerk erkannt worden sein. HIER KANNST DU DEINEN MICRO:BIT ALS DATENTRÄGER ÖFFNEN Kopiere dann deine Programmierung, die du zuvor heruntergeladen hast, in den Datenträger-Ordner deines micro:bits.
- Seite 59 Alle Funktionalitäten des Joy-Cars haben wir für dich in einer eigenen Erweiterung zusammengestellt. Um diese für dein Projekt zu aktivieren, öffne in deiner Blockübersicht zunächst den Reiter Fortgeschritten und klicke auf Erweiterungen. Suche nun in der Suche nach dem Joy-Car und klicke auf unsere Erweiterung. Sie wird dann automatisch zu deinem Projekt hinzugefügt.
- Seite 60 DIE ERWEITERUNG ALLES AN EINEM ORT Nachdem du über das Erweiterungsmenü die Joy-Car Erweiterung zu deinem Projekt hinzugefügt hast, findest du in deiner Blockübersicht den Reiter JoyCar. Hier sind alle Funktionalitäten des Joy-Cars vereint, sodass du direkt loslegen kannst. Die Funktionen sind hierbei nach Motoren, Beleuchtung, Sensoren und weiteren Funktionen kategorisiert. Die einzel- nen Funktionen sollten leicht verständlich sein.
- Seite 61 MEIN BLOCK Über die Blöcke der Joy-Car Erweiterung erhältst du also Zugriff auf alle Funktionen deines Joy-Cars. So kannst du dir deine Blöcke und deine gesamte Programmierung individuell zurecht legen. Auf den folgenden Seiten haben wir dir jeden einzelnen Block noch einmal zusammengefasst und seine Funktion erklärt.
- Seite 62 MOTOREN Die Motoren sind der Antrieb des Joy-Cars. Mit ihnen kannst du das Joy-Car vor und zurück bewegen, verschiedene Geschwindigkeiten fahren, abbiegen und bremsen. Auch die zwei Servo-Motoren können in dieser Kategorie angesteuert werden. FAHREN MOTORVERZÖGERUNG BREMSEN Fahre vorwärts oder rückwärts. Die Geschwindig- Durch Fertigungstoleranzen kann es vorkommen, dass sich die beiden Bremse das Joy-Car bis zum Stillstand.
- Seite 63 SCHEINWERFER Die vier LED-Module, also die Scheinwerfer des Joy-Cars, können in dieser Kategorie angesteuert werden. So kannst du hier die Frontscheinwerfer ansteuern, Blinker und Bremslichter aktivieren und noch weitere Funktionen finden. SCHEINWERFER WARNBLINKER BLINKER Hiermit kontrollierst du die Scheinwerfer. Vorne Hiermit kontrollierst du das Warnlicht.
- Seite 64 SENSOREN Die Sensoren an deinem Joy-Car ermöglichen es dir erst auf bestimmte Ereignisse zu reagieren. Hindernisse, Linien, Markierungen und Geschwindigkeit? All das können die Sensoren an deinem Joy-Car erkennen. LINEFINDER-SENSOREN SPEED-SENSOREN Prüft den Linken/Mittleren/Rechten Linefinder-Sensor, ob eine Prüft den Linken/Rechten Speed-Sensor, ob das Signal Linie auf dem Boden erkannt werden konnte.
- Seite 65 WEITERE FUNKTIONEN Hier findest du noch weitere Funktionen des Joy-Cars, die über die bisherigen Motorfunktionalitäten, Sensorabfragen und Lichteinstellungen hinaus gehen. BATTERIESPANNUNG BUZZER Spiele eine vordefinierte Melodie über den Buzzer ab. Du kannst Die Batteriespannung kann über den Analog-Digital-Converter-Pin dabei zusätzlich auswählen, ob die Melodie nur einmal gespielt des micro:bit abgefragt werden.
- Seite 66 MAXIMALER SPASS, MINIMALER AUFWAND? Du möchtest lieber sofort losfahren? Du kannst auch, anstatt dein Joy-Car selbst zu entwickeln, unser vorbereitetes Skript auf deinem micro:bit installieren. Hier sind die wichtigsten Funktionen bereits in einer Anwendung mit drei verschiedenen Modi zusammengestellt.
- Seite 67 MICROPYTHON EINFÜHRUNG MICROPYTHON? MicroPython ist eine Implementierung, die auf der Python 3 Sprache basiert. Sie wurde in der Programmiersprache C geschrieben und ist für die Anwendung auf Mikrocontrollern, wie dem micro:bit, optimiert. Anwender, die bereits mit den Grundlagen der Softwareprogrammierung vertraut sind, können direkt mit dieser Variante beginnen. OHNE VORERFAHRUNG IN DER PROGRAMMIERUNG EMPFIEHLT ES SICH JEDOCH, ZUNÄCHST MIT DER MAKE:CODE VARIANTE AUS DEM VORHERIGEN KAPITEL EINZUSTEIGEN.
- Seite 68 INTERFACE EINRICHTUNG Beim ersten Start des Mu-Editors ist es zunächst notwendig, den gewünschten Modus zu wählen. Wähle hier BBC MICRO:BIT aus und bestätige die Auswahl mit OK. Die detaillierte englische MicroPython Dokumentation kann zusätzliche Hilfestellung bieten und ist hier zu finden. Die wichtigsten Optionen und Möglichkeiten des Editor-Interfaces werden in den nächsten Schritten erklärt.
- Seite 69 PRÜFEN Hiermit kann der verfasste Quellcode überprüft werden. Fehler werden automatisch erkannt und entsprechend angezeigt. AUFSPIELEN Der verfasste Quellcode wird final überprüft, für den micro:bit kompiliert und anschließend auf das Gerät übertragen. STEUERUNGSELEMENTE CODE-BEREICH REPL EIN-/AUSGABE-BEREICH...
- Seite 70 DER ERSTE START EIN NEUES KAPITEL Du hast noch keine Erfahrungen mit der Mu-Entwicklungsumgebung gesammelt, möchtest aber gerne mit einem kleinen Beispiel starten? Wir bringen dir die Umgebung näher! Nach dem Start der Entwicklungsumgebung beginnst du direkt mit einem leeren Projekt. Von hier aus kann es direkt los gehen!
- Seite 71 Starte am besten mit einem simplen Test. Übernimm ruhig das linke Beispiel. Hierbei wird der Text „Hallo Welt!“ auf der LED-Matrix deines micro:bits und auf der Konsole angezeigt. FÜGE DEINEN CODE HIER EIN KLICKE, WENN DU FERTIG BIST, AUF AUFSPIELEN, UM DEN CODE AUF DEINEN ANGESCHLOSSENEN MICRO:BIT ZU ÜBERTRAGEN.
-
Seite 72: Inhaltsverzeichnis
CODE MODIFIKATIONEN Du möchtest lernen, wie das Joy-Car funktioniert? Optimierungen einpflegen? Eigene Entwicklungen und Ideen hinzu- fügen? Kein Problem! In dem folgenden Teilkapitel haben wir unseren Code in seine Bestandteile zerlegt und ihn für dich in einzelne Dateien auf- geteilt. -
Seite 73: Io_Expander_Read.py
IO_EXPANDER_READ.PY Hier werden alle Sensorinformationen durch den IOExpander per I2C ausgelesen. Das Auslesen übernimmt dabei die Funktion fetchSensorData(). Es werden hierbei keine Übergabeparameter benötigt. Der Rückgabewert ist ein Dictionary welches die folgenden Informationen enthält: Speed-Sensor Links Speed-Sensor Rechts LineTracking-Sensor Links LineTracking-Sensor Mitte LineTracking-Sensor Rechts Hindernis-Sensor Links... -
Seite 74: Adc_Read.py
Lade die rc_joycar.py auf den micro:bit deines Joy-Cars und die rc_remote.py auf den micro:bit, den du als Fernsteuerung benutzt. Neige den micro:bit, den du als Fernsteuerung benutzt, in die Richtung in die du fahren möchtest und dein Joy-Car fährt in diese Richtung. Auf Button A nutzt du die Hupe. Der Button B schaltet das Licht ein. -
Seite 75: Demo.py
DEMO.PY Dieses Script dient als Beispiel-Anwendung und besteht aus drei Modi, die mit dem Button A durchgeschaltet werden können: Modus 0: Standby, Modus 1: Linienfolgen, Modus 2: Hindernisse erkennen und Ausweichen SONAR.PY In diesem Script wird dir gezeigt, wie man das Sonar des Joy-Cars nutzen kann. Die Funktion sonar() erwartet keine Argumente und gibt den gemessenen Abstand zum nächsten Gegenstand in cm zurück. - Seite 76 AUFTANKEN UND LOS! Dein Joy-Car ist nun einsatzbereit. Du kannst dir entweder nun deine eigene Programmierung entwickeln oder unsere Bei- spielcodes ausprobieren und die Funktionen deines Joy-Cars kennenlernen. Alle Dateien und Beispiele findest du zum Download auf unserer Joy-Car-Webseite.
- Seite 77 Wir sind auch nach dem Kauf für dich da. Sollten noch Fragen offen bleiben oder Probleme auftauchen stehen wir dir auch per E-Mail, Telefon und Ticket-Supportsystem zur Seite. E-Mail: service@joy-it.net Ticket-System: http://support.joy-it.net Telefon: +49 (0)2845 9360 – 66 (10 - 17 Uhr) Für weitere Informationen besuche unsere Website auf:...