SunFounder Smart Video Car für Raspberry Pi Handbuch
Für das raspberry pi modell b+, 2 modell b and 3 modell b
Inhaltsverzeichnis
Über SunFounder
SunFounder ist ein Technologieunternehmen, spezialisiert auf die Entwicklung von Raspberry Pi
und Arduino Open Source Community. Engagiert für die Förderung der Open Source Kultur,
streben wir danach, Menschen auf der ganzen Welt Spass an der Eletronikherstellung zu bringen
und es jedem zu erlauben ein Maker zu sein. Unsere Produkte umfassen Lernsets,
Entwicklungsboards, Roboter, Sensormodule und Entwicklungswerkzeuge. Neben hochwertigen
Qualitätsprodukten bietet SunFounder auch Video -T utorials an, zur Unterstützung Ihrer eigenen
Projekte. Wenn Sie nun Interesse an Open Source haben oder am Basteln von etwas Coolem,
dann heißen wir Sie herzlich willkommen!
Über dieses Set
Dieses Set eignet sich für das Raspberry Pi Modell B+, 2 Modell B and 3 Modell B.
In diesem Handbuch werden wir Ihnen zeigen, wie man einen Smart Car bildet, mit Hilfe von
Erläuterungen, Illustrationen von Bauteilen und schematischen Schaltkreisdiagrammen, aus Sicht
der Hardware und Software. Besuchen Sie unsere Webseite
Download von zugehörigen Codes und schauen Sie sich unsere Anleitung auch unter
Get Tutorials
und Videos unter
github.com
https://github.com/sunfounder/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi
Gratis Support
Für TECHNISCHE Fragen, fügen Sie ein Topic in der
hinzu, worauf wir sobald wie möglich antworten werden.
Für NICHT-TECHNISCHE Fragen, wie über Bestellungs- und Zustellungsprobleme,
Sie eine E-Mail an
Vorwort
VIDEO
an, oder holen sich den Code auf unserer Seite auf
service@sunfounder.com.
www.sunfounder.com
FORUM
Sektion auf unserer Webseite
Teilen Sie Ihre Projekte mit uns im FORUM.
für den
LEARN >
senden
Inhaltsverzeichnis

Inhaltszusammenfassung für SunFounder Smart Video Car für Raspberry Pi
- Seite 1 Maker zu sein. Unsere Produkte umfassen Lernsets, Entwicklungsboards, Roboter, Sensormodule und Entwicklungswerkzeuge. Neben hochwertigen Qualitätsprodukten bietet SunFounder auch Video -T utorials an, zur Unterstützung Ihrer eigenen Projekte. Wenn Sie nun Interesse an Open Source haben oder am Basteln von etwas Coolem, dann heißen wir Sie herzlich willkommen!
-
Seite 2: Inhaltsverzeichnis
Verzeichnis Einführung ................................3 Übersicht der Bauteile ............................4 Acrylplatten .............................4 Mechanische Befestigungsteile ......................5 iii. Antriebsteile ............................6 iv. Elektrokomponenten ..........................7 Kundenseitig ............................10 Montage ................................11 Mechanische Montage ........................11 Auto Montage ..........................11 Montage der Kamerahalterung ..................... 25 Kamerahalterung + Auto ......................30 Einbau der Elektrokomponenten .................... - Seite 3 Kalibrierung beginnen ........................55 Motor-Einstellungen ........................... 55 Turning-Einstellungen ......................... 55 Mount-Einstellungen .......................... 56 Raus auf die Strasse! .......................... 57 Über das Programm ........................... 61 Abstrakt ..............................61 Einführung zum Socket ........................61 Server ............................. 61 Client .............................. 63 Zusammenfassung ............................. 65...
-
Seite 4: Einführung
Einführung Das SunFounder Smart Video Car Set für Raspberry Pi besteht aus einer Raspberry Pi, DC-DC Abwärtswandler, USB-Kamera, Gleichstrommotortreiber, und einer auf PCA9685 basierenden Servosteuerung. Aus der Sicht der Software, ist das Smart Car von der Struktur ein Client-Server (C/S-Struktur). Der TCP Server läuft auf Raspberry Pi, für die direkte Steuerung vom Auto. Und die Videodaten werden über die Open Source Software MJPG-Streamer in Echtzeit erfasst und... -
Seite 5: Übersicht Der Bauteile
Übersicht der Bauteile i. Acrylplatten... -
Seite 6: Mechanische Befestigungsteile
ii. Mechanische Befestigungsteile Teile Name Stk. M1.2*4 Selbstschneidende Schraube M2*8 Schraube M2.5*6 Schraube M3*10 Senkschraube M3*8 Schraube M3*10 Schraube M3*30 Schraube M4*25 Schraube M2.5*8 Kupfersäule M3*24 Kupfersäule... -
Seite 7: Antriebsteile
M2 Mutter M2.5 Mutter M3 Mutter M4 Selbstverriegelungsmutter F694ZZ Bundlager iii. Antriebsteile Teile Name Stk. TowerPro Micro Servo SG90 Untersetzungsgetriebe Vorderrad... -
Seite 8: Elektrokomponenten
Hinterrad iv. Elektrokomponenten Teile Name Stk. Raspberry Pi Modell B+ 16-Kanal 12-bit PWM Antrieb (Servosteuerung) L298N Gleichstrommotor- treiber... - Seite 9 DC-DC Abwärtswandler USB WiFi Adapter USB-Kamera 18650*2 Batteriehalter Band USB-Kabel...
- Seite 10 Kreuzsteck- schlüssel Kreuzschrauben- zieher Spiralschlauch 20cm Schaltdraht (F - F) 10cm Schaltdraht (F - F) 10cm Schaltdraht (M - F) 20cmSchaltdraht (M - M)
-
Seite 11: Kundenseitig
v. Kundenseitig Die unten angezeigten Teile sind NICHT im Set beinhaltet. Teile Name Stk. (benötigt) 18650 3.7V aufladbare Li-ion Batterie TF Karte... -
Seite 12: Montage
Montage Mechanische Montage 1. Auto Montage Vorderrad a) Schrauben Sie das F694ZZ Bundlager, Vorderrad und die folgenden Acrylplatten mit einer M4*25 Schraube und einer M4 Selbstverriegelungsmutter zusammen, siehe Abbild (Abb.). Benutzen Sie dafür die Kreuzsteckschlüssel, um die M4 Selbstverriegelungsmutter zu befestigen. - Seite 13 a) Schrauben Sie das F694ZZ Bundlager, Vorderrad und die folgenden Acrylplatten mit einer M4*25 Schraube und einer M4 Selbstverriegelungsmutter zusammen, wie folgt: Achten Sie auf die Ausrichtung dieser Platte. b) Die zusammengesetzten Teile c) Bitte beachten Sie, dass die Mutter nicht zu fest sollten, unterem Abb.
-
Seite 14: Hintere Unterplatte Des Fahrgestells + Hinterräder
Hintere Unterplatte des Fahrgestells + Hinterräder a) Setzen folgenden zwei b) Die zusammengesetzten Teile sollten, wie Acrylplatten zusammen. im unterem Abb. dargestellt aussehen. c) Befestigen Sie das Untersetzungsgetriebe, das Hinterrad und die folgenden Acrylplatten mit zwei M3*30 Schrauben und einer M3 Mutter. d) Die zusammengesetzten Teile sollten, wie im unterem Abb. - Seite 15 e) Setzen Sie folgende Acrylplatte wie f) Die zusammengesetzten Teile sollten, wie zuvor ein. im unterem Abb. dargestellt aussehen. g) Wie zuvor befestigen Sie das zweite Untersetzungsgetriebe und Hinterrad auf der gegenüberliegenden Seite mit zwei M3*30 Schrauben and M3 Mutter. h) Die zusammengesetzten Teile sollten, wie im unterem Abb.
-
Seite 16: Hintere Unterplatte Des Fahrgestells + Kupfersäulen
Hintere Unterplatte des Fahrgestells + Kupfersäulen a) Befestigen Sie die vier M3*24 Kupfersäulen b) Die zusammengesetzten Teile sollten, wie mit vier M3 Muttern in die Acrylplatte, siehe im unterem Abb. dargestellt aussehen. Abb.: Servo-Einstellungen Vor dem Einbau der Servos, müssen wir den Winkel der Ausgangsachse auf 90° einstellen. Warum? Der Grund ist, dass die Servos die wir benutzen sich ausschliesslich in einem Bereich von 0°... - Seite 17 Bereiten Servo einen Befestigen Sie den Servoarm an die Achse einarmigen Servoarm vor. und drehen es gegen den Uhrzeigersinn bis es sich nicht mehr drehen lässt. Das könnte so ausehen: b) Es kann sich in der unten angezeigten c) Unabhängig in welcher Position sich der Position befinden: Servoarm nun befindet, entnehmen Sie es vorsichtig, ohne daran zu drehen.
- Seite 18 d) Drehen Sie nun den Servoarm in den e) Sollte es nun ungefähr in der Position sein, Uhrzeigersinn, bis es sich nicht mehr dann müssen Sie den Servoarm nochmal drehen lässt. sollte einer gegen den Uhrzeigersinn drehen bis der Hebel naheliegenden, wie unten dargestellt, sich in einer aufrechten Position befindet.
- Seite 19 Lenkstange + Servoarm a) Befestigen Sie folgende Acrylplatte mit einer M2*8 Selbstschneidende Schraube, an das zweite Loch des Servoarms (siehe Abb). Die M2*8 Selbstschneidende Schraube ist mit in der Servo Verpackung enthalten; eins der zwei längsten Schrauben. Der Servoarm ist auch mit in der Servo Verpackung enthalten. Hinweis: Seien Sie vorsichtig mit der Schraube, Sie könnten sich daran verletzen.
- Seite 20 Lenkservo + Oberplatte a) Befestigen Sie nun den Servo auf die unten angezeigte Acrylplatte mit zwei M2*8 Schrauben und M2 Muttern. Achten Sie auf die Oberfläche der Platte. Es wird im Abb. auf das durch den Pfeil angezeigte Loch in der Platte hingewiesen. b) Die zusammengesetzten Teile sollten, wie im unterem Abb.
- Seite 21 Lenkservo + Lenkstange a) Schrauben Sie die unten angezeigten Teile mit einer M2*4 Schraube zusammen. Die M2*4 Schraube ist mit in der Servo Verpackung enthalten; einer der kürzesten Schrauben in der Packung. b) Die zusammengesetzten Teile sollten, wie im unterem Abb. dargestellt aussehen. ...
-
Seite 22: Vordere Unterplatte Des Fahrgestells + Oberplatte
Vordere Unterplatte des Fahrgestells + Oberplatte a) Schrauben Sie die unten angezeigten Teile und die Vorderräder mit vier M3*8 Schrauben, vier M3*24 Kupfersäulen und vier M3 Muttern zusammen. b) Die zusammengesetzten Teile sollten, wie im unterem Abb. dargestellt aussehen. -
Seite 23: Obere Platte + Kupfersäulen
Obere Platte + Kupfersäulen a) Befestigen Sie die 16 M2.5*8 Kupfersäulen und 16 M2.5 Muttern in die Acrylplatte, siehe Abb.: b) Die zusammengesetzten Teile sollten, wie im unterem Abb. dargestellt aussehen. c) Sicht von oben auf die hintere Seite der Platte:... -
Seite 24: Hintere Unterplatte Des Fahrgestells + Oberplatte
Hintere Unterplatte des Fahrgestells + Oberplatte a) Schrauben Sie die zwei fertiggestellten Teile mit vier M3*8 Schrauben zusammen. b) Die zusammengesetzten Teile sollten, wie im unterem Abb. dargestellt aussehen. c) Hintere Seite der Platte:... - Seite 25 Batteriehalter a) Befestigen Sie den Batteriehalter in die untere Seite der Platte mit zwei M3*10 Senkkopfschrauben und zwei M3 Muttern. Wenn Sie möchten, können Sie das Band durch die untere Seite der Platte ziehen, womit das Entnehmen der Batterien einfacher wird. b) Die zusammengesetzten Teile sollten, wie im unterem Abb.
-
Seite 26: Montage Der Kamerahalterung
2. Montage der Kamerahalterung Platten + Servoarm a) Befestigen Sie den Servoarm auf die b) Die zusammengesetzten Teile sollten, wie im folgende Acrylplatte mit vier M1.2*4 unterem Abb. dargestellt aussehen. Schrauben. Der Servoarm Servo Verpackung enthalten. c) Befestigen Sie den Servoarm auf die d) Die zusammengesetzten Teile sollten, wie im folgende Acrylplatte mit vier M1.2*4 unterem Abb. - Seite 27 Schwenk-/Neigungsservo + Platte a) Befestigen Sie das Servo auf folgende b) Die zusammengesetzten Teile sollten, wie Acrylplatte mit zwei M2*8 Schrauben und im unterem Abb. dargestellt aussehen. zwei Muttern, dies "Schwenkservo". c) Befestigen Sie das Servo auf folgende d) Die zusammengesetzten Teile sollten, wie Acrylplatte mit zwei M2*8 Schrauben und im unterem Abb.
-
Seite 28: Platte Mit Schwenkservo + Platte Mit Neigungsservo
Platte mit Schwenkservo + Platte mit Neigungsservo a) Schrauben Sie die zwei Plattenteile mit b) Die zusammengesetzten Teile sollten, wie im zwei M3*10 Schrauben und zwei M3 unterem Abb. dargestellt aussehen. Muttern zusammen. Die beiden Platten sollten senkrecht zueinander stehen. c) Befestigen Sie die folgenden zwei Teile d) Die zusammengesetzten Teile sollten, wie im in einem rechtem Winkel miteinenader... - Seite 29 Servos + Servoarmplatten a) Bringen Sie folgende Teile ohne b) Die zusammengesetzten Teile sollten, wie im jegliche Schrauben zusammen. unterem Abb. dargestellt aussehen. Ansicht von oben: Vorderansicht:...
- Seite 30 Vor Zusammenschrauben c) Nun schrauben Sie alles zusammen mit M2*4 müssen Sie zuerst den Drehwinkel Schrauben. überprüfen. Drehen Die M2*4 Schraube ist mit in der Servo Verpackung Ausrichtung der Achse des (oberen) enthalten und ist die Kürzeste aller Schraube. Neigungsservos zu Ihrer rechten Seite, siehe Abb.
-
Seite 31: Kamerahalterung + Auto
3. Kamerahalterung + Auto a) Befestigen Sie die Kamerahalterung auf das Auto mit zwei M3*10 Schrauben und M3 Muttern. b) Die zusammengesetzten Teile sollten, wie im unterem Abb. dargestellt aussehen. - Seite 32 b) Vor der nächsten Montage, sollten Sie die Lenkbarkeit des Servos überprüfen. 1) Zuerst drehen Sie die Vorderräder nach rechts und links und achten auf den höchstmöglichen Grad der Drehung: die Räder sollten auf beiden Seiten im gleichen Grad drehbar sein. 2) Drehen Sie am Schwenkservo auf dem Objektträger nach rechts und links, um zu versichern, dass es normal funktioniert –...
-
Seite 33: Einbau Der Elektrokomponenten
ii. Einbau der Elektrokomponenten - Befestigen Sie die Elektrokomtonenten an das Auto mit M2.5*6 Schrauben. Siehe Abb.:... -
Seite 34: Schaltkreise Verbinden
iii. Schaltkreise verbinden Vorschau: Das Endergebnis wird folgendermaßen aussehen, wenn alle Schaltkreise miteinander verbunden sind. Es sieht komplizierter aus als es ist, also keine Sorgen! Sie werden in den nächsten Schritten eine detaillierte Anweisung vorfinden. Schritt für Schritt wird alles erklärt. - Seite 35 1. Schritt: Verbinden Sie die 2 Gleichstrommotoren mit dem Motortreiber. Sie können den L-förmigen PCB Verbindung entfernen und später wieder anschliessen. Hinweis: Nachdem alles fertig verkabelt ist, und das Auto in die entgegengesetzte, als die gewünschte Richtung fährt, müssen Sie nur die Kabeln der 2 Motoren umtauschen. Nach der Verkabelung sollte es so aussehen:...
- Seite 36 2. Schritt: Verbinden Sie den Motortreiber mit dem Raspberry Pi GPIO Port basierend auf die folgende Tafel. Raspberry Pi GPIO Port Gleichstrommotortreiber Pin11 Pin12 Pin13 Pin15...
- Seite 37 3. Schritt: Verbinden Sie die Servosteuerung mit Raspberry Pi GPIO Port wie folgt: Raspberry Pi GPIO Port Servosteuerung Pin 2 (5V) Pin 3 (SDA) Pin 5 (SCL)
- Seite 38 4. Schritt: Verkabeln Sie den Lenkservo, mit dem die Fahrtrichtung gesteuert wird, zu CH0 auf der Servosteuerung, und die untere/obere Servo, mit dem die Perspektive der Kamera gesteuert wird, zu CH14 und CH15. Siehe Abb.: 5. Schritt: Verkabeln Sie den Motorantreiber mit der Servosteuerung.
- Seite 39 6. Schritt: Verbinden Sie die Servosteuerung mit dem DC-DC Abwärtswandler. Für diese Verkabelung müssen Sie erst die Schrauben (siehe Abb.) etwas lockern, dann die Kabeln einstecken, und die Schrauben mit einem Schraubenzieher wieder befestigen. Nach der Verkabelung sollte es so aussehen:...
- Seite 40 7. Schritt: Verbinden Sie den Batteriehalter mit dem DC-DC Abwärtswandler und dem Gleichstrommotortreiber. Hinweis: Bitte legen Sie NOCH KEINE Batterien ein, sondern erst wenn Sie mit den ganzen Verkabelungen feritg sind. Und achten Sie darauf, dass Sie das rote Kabel (Strom) mit der Anode des Halters verbinden, und das schwarze Kabel (GND) mit der Kathode verbinden.
- Seite 41 Das Ganze mit den Verkabelungen sollte so aussehen:...
- Seite 42 8. Schritt: An das Raspberry Pi verbinden Sie nun den DC-DC Abwärtswandler, USB Wi-Fi Adapter und die USB-Kamera. -------------- Glückwunsch! Die Verkabelung ist vollendet. -------------...
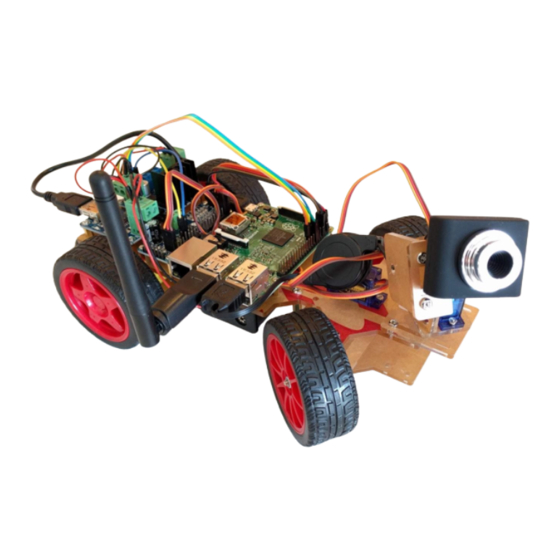
- Seite 43 Das erfolgreich zusammengesetzte Auto sollte wie folgt aussehen:...
-
Seite 44: Grundlage Der Elektrokomponenten
Grundlage der Elektrokomponenten Raspberry Pi Das Raspberry Pi ist ein kostengünstiger, kreditkartengrosser Computer, welches man an einem Computermonitor oder TV stecken kann, und ist verwendbar mit einer Standardtastatur und Maus. Dieses Gerät ermöglicht Menschen aller Altersstufen das Computing zu erkunden und Programmsprachen wie Scratch und Python zu erlernen. -
Seite 45: Dc-Dc Abwärtswandler
DC-DC Abwärtswandler Dieses Modul wurde basierend auf dem Chip XL1509 entwickelt. Es wandelt den Output der Batterie von 7.4V zu 5V, so dass Raspberry Pi und das Servo mit ausreichendem Strom versorgt werden. Als ein DC zu DC Abwärtswandler-IC (integrierter Schaltkreis), weist der Chip eine Eingangsspannung von 4.5V bis 40V auf und erzeugt eine Ausgangsspannung von 5V bei einer Stromstärke von 2A. -
Seite 46: Gleichstrommotortreiber
Gleichstrommotortreiber Wie der Name schon sagt, wird das Modul zum Antrieb von Gleichstrommotoren verwendet. Der Treiber wurde basierend auf L298N entwickelt. Als ein Hochspannungs- und Großstromchip für Motortreiber, gekapselt mit 15 Pins, besitzt es eine maximale Betriebsspannung von 46V und erreicht im Instant einen Spitzenstromspannung von 3A, bei einem Betriebsstrom von 2A und einer Nennleistung von 25W. -
Seite 47: Servosteuerung
Servosteuerung Die Servosteuerung wurde basierend auf PCA9685 gebaut. PCA9685 ist eine 16-Kanal LED-Steuerung mit I2C-Busschnittstelle. Das Auflösungsverhältnis jedes Kanals beträgt 12 Bits =4096 Pegel). Die Steuerung arbeitet in einer Frequenz zwischen 40Hz und 1000Hz und das Tastverhältnis kann in einem Bereich von 0 to 100% eingesstellt werden. Es überliefert PWM-Signale an das Servo und steuert somit auch den Drehwinkel. -
Seite 48: Zugehörige Software
Holen Sie sich den Quellcode 1. Schritt Den Quellcode direkt aus Github auf Ihr Raspberry Pi herunterladen. clone https://github.com/sunfounder/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi.g 2. Schritt Den Quellcode direkt aus Github auf Ihr Linux herunterladen. 1. Methode Ö ffnen Sie ein Terminal in Ihrem Linux. Downloaden Sie git:... -
Seite 49: Softwareumgebung
Klicken Sie auf Download ZIP, wie folgt: Nach dem Download: - Gehen Sie zur Datei und entpacken es durch Extract here - Oder entpacken Sie es durch: unzip Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi-master.zip Dann ändern Sie den Ordnernamen ./Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi-master ~/Sunfounder_Smart_Video_Car_ Kit_for_RaspberryPi iii. Softwareumgebung Ausführung auf PC Bereiten Sie den PC für den Fernzugriff vor Installieren Sie python-tk... -
Seite 50: Ausführung Auf Raspberry Pi
Konfigurationen durchgeführt werden. MJPG-Streamer Einführung Die Erfassung und Übertragung von Videodaten durch das SunFounder Smart Video Car erfolgt auf der Basis des MJPG-Streamers. Der MJPG-Streamer besteht aus Kommandozeilenanwendungen, das das JPG-Frame von einem einzigen Eingabe-Plugin zu mehreren Ausgabe-Plugins kopiert. Es kann dazu verwendet werden JPEG-Dateien über ein IP-basierendes Netzwerk, von der Webcam zu einem Viewer wie... - Seite 51 Sie werden folgendes sehen: pi@raspberrypi:~ $ lsusb Device 004: 1908:2310 GEMBIRD Device 003: 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter Device 002: 0424:9514 Standard Microsystems Corp. Device 001: 1d6b:0002 Linux Foundation root hub Prüfen Sie, ob der Treiber für die Kamera normal funktioniert: /dev/vid* Sie werden folgendes sehen:: pi@raspberrypi:~...
-
Seite 53: Kalibrierung
Kalibrierung Vorbereitung Serverausführung Führen Sie den Kalibrierungsserver auf Ihrem Raspberry Pi aus und warten Sie bis eine Verbindung vom Client hergestellt wird. Stellen Sie sicher, dass der Stromkreis richtig angeschlossen ist. Schalten Sie nun das Smart Car ein und öffnen das Terminal im Linux. Verbinden Sie es mit Raspberry Pi über SSH. Danach gehen Sie auf das Datenverzeichnis von Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi/server und führen den Server cali_server.py aus. - Seite 54 Ö ffnen Sie die Datei File > Open > Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi-master > client > cali_client.py und ändern Sie den Wert von HOST für die IP-Addresse des Raspberry Pis. Nach der Änderung, speichern Sie die Datei, und klicken danach auf die Run-Option und wählen Run Module aus.
- Seite 55 Führen Sie aus cali_client.py aus: sudo python cali_client.py Unabhängig vom welchem System, Linux oder Windows, sobald Sie cali_client.py ausführen wird dieses Fenster mit Raspberry Pi Smart Video Car Calibration (Kalibrierung des Smart Cars) erscheinen: Im Terminal, welches per Fernzugriff mit Raspberry Pi verbunden ist, wird die IP Addresse vom PC angezeigt.
-
Seite 56: Kalibrierung Beginnen
Kalibrierung beginnen In der Kalibrierung UI gibt es drei Abteilungen: Motor, Turning und Mount. Motor-Einstellungen Klicken Sie auf Run und das Auto wird sich nach vorne bewegen. Prüfen Sie, ob beide Hinterräder zur gleichen Zeit sich bewegen. Wenn das nicht der Fall sein sollte, kann es an der Verkabelung liegen. -
Seite 57: Mount-Einstellungen
Mount-Einstellungen Das Schwenkservo auf dem Auto sollte genau nach vorne gerichtet und die Kamera nach oben geneigt sein. Wenn das nicht der Fall ist, müssen Sie ähnliche Einstellungen wie zuvor vornehmen. In der Mount-Abteilung kann man das Schwenkservo und Neigungsservo einstellen. Wie zuvor gibt es für beide Fein- und Grobeinstellungen. -
Seite 58: Raus Auf Die Strasse
Raus auf die Strasse! Serverausführung Führen Sie den TCP-Server auf dem Raspberry Pi aus, und warten bis der Client eine Verbindung mit dem Auto hergestellt hat. Sie benötigen zwei Terminals für den Server, eins für die Ausführung von tcp_client.py, um Steuerungsbefehle für das Auto zu empfangen, und das andere für die Ausführung von MJPG-Streamer für die Video-Streams. - Seite 59 Führen Sie das Programm aus: sudo sh start.sh Die Videodatenerfassung sollte so starten: Anschließend tippen Sie die Adresse (ersetzen Sie 192.168.0.xxx mit Ihrer Raspberry Pi IP-Adresse) in die Adressleiste auf Ihrem Browser ein (Firefox wird empfohlen): http://192.168.0.xxx:8080/stream.html DHinteren Sie auf Enter und Sie werden die Echtzeitaufzeichnung von der Kamera auf Ihrem Bildschirm sehen können.
- Seite 60 Ö ffnen Sie die Datei File > Open > Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi-master > client > client App.py und ändern Sie den Wert von HOST für die IP Addresse des Raspberry Pis. Nach der Änderung, speichern Sie die Datei und wählen Run > Run Module aus. Für Linux: Ö...
- Seite 61 Nun führen Sie das Clientprogramm aus: sudo python client_App.py Unabhängig vom welchem Betriebssystem, Linux oder Windows, sobald Sie client_App.py ausführen wird folgendes Fenster erscheinen: Sie können auf die Schaltflächen Forward und Backward dHinteren, um das Auto fern zusteuern. Oder klicken Sie auf X+, X-, Y+ und Y- um die Kamera zu bedienen. Hinweis: Das Serverprogramm muss vor dem Clientprogramm ausgeführt werden.
-
Seite 62: Über Das Programm
Server läuft auf Raspberry Pi Einführung zum Socket Das C/S-Struktur-Programm von SunFounder Smart Car Raspberry Pi-basierenden Smart Cars ist auf Grundlage vom Socket-Modul der Programmiersprache Python geschrieben. Das Socket steht für das Ende einer Verbindung. Beim TCP/IP-Protokoll wird ein Socket durch IP-Adresse und Portnummer bestimmt, was von Programmen verwendet wird, um Daten mit anderen Programmen auszutauschen. -
Seite 63: Prozessdiagramm Vom Serverprogramm
= socket( ) # Create a socket for the server. s.bind( ) # Bind the address to the socket. s.listen( ) # Listen to the connection. inf_loop: # Indefinite loop of the server. = s.accept( ) # Accept the connection from the client. comm_loop: # Communication loop. -
Seite 64: Client
2. Client Es ist einfacher einen TCP-Client zu erstellen als einen Server. Benutzen Sie den folgenden Pseudocode: = socket( ) # Create a client socket. c.connect( ) # Try to connect a server. comm_loop: # Communication loop. c.send( )/c.recv( ) # Dialog (sending out and receiving data) c.close( ) # Close the client socket. -
Seite 65: Prozessdiagramm Vom Client-Programm
Tippen Sie den unten angezeigten Code ein: #!/usr/bin/env python from Tkinter import = Tk() # Create a top window top.title('Sunfounder.com') label = Label(top, text='Hello Geeks !', fg='blue') # Create a label and set its foreground color as blue label.pack() # layout top.mainloop() -
Seite 66: Zusammenfassung
über Software und Codierung erfahren, welches als solide Grundlage für zukünftige Erforschungen im Open Source Bereich dienen wird. SunFounder Smart Video Car für Raspberry Pi ist nicht nur ein Spielzeug, sondern mehr ein sinnvolles Entwicklungsset für Raspberry Pi. Nach all den Studien und Praxis an diesem Set, sollten Sie nun ein besseres Verständnis vom Raspberry Pi haben. - Seite 67 Copyright Hinweis Alle Inhalte in diesem Handbuch, einschließ lich aber nicht beschränkt auf Text, Bilder und Code ist das Eigentum von SunFounder Company. Dieses Handbuch ist nur für persönliche Studien-, Erforschungs-, Vergnügungs-, andere nicht kommerzielle oder gemeinnützige Zwecke, im Rahmen der einschlägigen Verordnungen und Uhrheberrecht Gesetze, und ohne die gesetzlichen Rechte des Autors und der jeweiligen Rechtinhaber zu verletzen.