Jetter JX6-CON-Move Betriebsanleitung

Verwandte Anleitungen für Jetter JX6-CON-Move









Inhaltszusammenfassung für Jetter JX6-CON-Move
- Seite 1 Betriebsanleitung Artikel-Nummern: JX6-CON-Move: 100000258 JX6-CON-Move-BP: 100000259 Artikel-Nr.: 60864129 / Auflage 3.023.1 März / 2006 Printed in Germany...
- Seite 2 JetWeb Auflage 3.023.1 Die Firma Jetter AG behält sich das Recht vor, Änderungen an ihren Produkten vorzunehmen, die der technischen Weiterentwicklung dienen. Diese Änderungen werden nicht notwendigerweise in jedem Einzelfall dokumentiert. Dieses Handbuch und die darin enthaltenen Informationen wurden mit der gebotenen Sorgfalt zusammengestellt.
-
Seite 3: So Können Sie Uns Erreichen
07141/2550-484 E-Mail - Vertrieb: sales@jetter.de E-Mail - Technische Hotline: hotline@jetter.de Internetadresse: http://www.jetter.de Diese Betriebsanleitung gehört zum Modul JX6-CON-Move(-BP): Typ: Serien-Nr.: Baujahr: Auftrags-Nr.: Vom Kunden einzutragen: Inventar-Nr.: Ort der Aufstellung: © Copyright 2006 by Jetter AG. Alle Rechte vorbehalten. Jetter AG... - Seite 4 JetWeb Historie Auflage Bemerkung 1.00 Historie erst ab Auflage 3.00.1 eingeführt 2.00 Historie erst ab Auflage 3.00.1 eingeführt 3.00 Endstufen-Register JetMove 6xx 3.000.1 Siehe Anhang G: Aktuelle Änderungen der Auflage 3.000.1 3.023.1 Siehe “Aktuelle Änderungen” auf Seite 538. Jetter AG...
-
Seite 5: Inhaltsverzeichnis
Modul JX6-CON-Move(-BP) Inhalt Inhalt Betriebsanleitung Sicherheitshinweise Überblick Hardwarebeschreibung Technische Daten 4.1.1 Mechanische Abmessungen 4.1.2 Technische Daten 4.1.3 Betriebsparameter Konfigurationen 4.2.1 Gehäuse-Varianten 4.2.2 Modul-Typen 4.2.3 Submodule 4.2.4 Das Submodul JX6-SB 4.2.5 Anzahl Achsen Anschlussbeschreibung 4.3.1 Bestückungsplan 4.3.2 Anschlussbild 4.3.3 Spannungsversorgung 4.3.4 Digitale Eingänge... - Seite 6 Registerübersicht: Endlospositionierung 7.3.3 Registerbeschreibung: Endlospositionierung 7.3.4 Kommandoübersicht: Endlospositionierung Position mit Eingangssignal sichern 7.4.1 Überblick 7.4.2 Registerübersicht:Position mit Eingangssignal sichern 7.4.3 Registerbeschreibung: Position mit Eingangssignal sichern Bahnsteuerungen Linearinterpolation 8.1.1 Überblick 8.1.2 Linearinterpolationen mit dem Modul JX6-CON-Move(-BP) 8.1.3 Konfigurationen 8.1.4 Programmier-Hinweise Jetter AG...
- Seite 7 Registerübersicht: Linearinterpolation 8.1.6 Registerbeschreibung: Linearinterpolation 8.1.7 Kommandoübersicht: Linearinterpolation Kreisinterpolation mit 2 Achsen 8.2.1 Überblick 8.2.2 Kreisinterpolation mit 2 Achsen und dem Modul JX6-CON-Move(-BP) 257 8.2.3 Konfigurationen 8.2.4 Programmier-Hinweise 8.2.5 Registerübersicht: Kreisinterpolation mit 2 Achsen 8.2.6 Registerbeschreibung: Kreisinterpolation mit 2 Achsen 8.2.7...
- Seite 8 Anhang B: Kurzübersicht Steuerregister Anhang C: Kurzübersicht Kommandos Anhang D: Kurzübersicht Register Anhang E: Fehler + Warnungen Endstufe JetMove 2xx Anhang F: Fehler und Warnungen Endstufe JetMove 6xx Anhang G: Aktuelle Änderungen Anhang H: Abkürzungsverzeichnis Anhang I: Abbildungsverzeichnis Anhang J: Stichwortverzeichnis Jetter AG...
-
Seite 9: Betriebsanleitung
Bestimmungsgemäße Verwendung Die bestimmungsgemäße Verwendung beinhaltet das Vorgehen gemäß Betriebsanleitung. Das Modul JX6-CON-Move(-BP) wird in Steuerungen von Maschinen wie z. B. im Förderanlagenbau, im Sondermaschinenbau und in der Handhabungstechnik verwendet. Das Modul JX6-CON-Move(-BP) ist ein Reglermodul und kann nur in Verbindung mit einem CPU-Modul logisch betrieben und angesteuert werden. - Seite 10 Reparaturen an dem Modul JX6-CON-Move(-BP) dürfen nicht vom Betreiber selbst durchgeführt werden. Das Modul JX6-CON-Move(-BP) enthält keine vom Betreiber reparierbaren Teile. Das JX6-CON-Move(-BP) ist zur Reparatur an die Firma Jetter AG einzuschicken. Stilllegung und Entsorgung des Moduls JX6-CON- Move(-BP) Für die Stilllegung und Entsorgung des Moduls hat die Betreiberfirma die für den Standort geltenden Umweltrichtlinien des jeweiligen Landes zu beachten.
- Seite 11 Modul JX6-CON-Move(-BP) 1 Betriebsanleitung Symbolerklärung in der Betriebsanleitung Sie werden auf eine mögliche drohende Gefährdung hingewiesen, die zu schweren Körperverletzungen oder zum Tod führen kann. Warnung Sie werden auf eine mögliche drohende Gefährdung hingewiesen, die zu leichten Körperverletzungen führen kann.
- Seite 12 1 Betriebsanleitung JetWeb Jetter AG...
-
Seite 13: Sicherheitshinweise
Hersteller genehmigte Umbauten am Modul führen zum Verlust jeglicher Haftungsansprüche gegen die Firma Jetter AG. Die Originalteile sind speziell für das Modul JX6-CON-Move(-BP) konzipiert. Teile und Ausstattungen anderer Hersteller sind von uns nicht geprüft und deshalb auch nicht freigegeben. Ihr An- und Einbau kann die Sicherheit und einwandfreie Funktion des Reglermoduls beeinträchtigen. -
Seite 14: Hinweisschilder Und Aufkleber
2 Sicherheitshinweise JetWeb Hinweisschilder und Aufkleber Beachten Sie unbedingt die Beschriftungen, Hinweisschilder und Aufkleber und halten Sie diese lesbar. Erneuern Sie beschädigte oder unlesbare Hinweisschilder und Aufkleber. Jetter AG... - Seite 15 Modul JX6-CON-Move(-BP) 2 Sicherheitshinweise Hinweise zur EMV Das Modul JX6-CON-Move(-BP) ist eine Einrichtung (Produkt) der EMV Klasse A bei der Störaussendung. Dieses Einrichtung kann im Wohnbereich Funkstörungen verursachen. Der Betrieb geschieht auf eigene Gefahr. Die Störsicherheit einer Anlage verhält sich, wie die schwächste Komponente in der Anlage.
-
Seite 16: Sub-D Stecker Oder Buchsen: 9, 15 Oder 25 Polig Mit Vollmetallgehäusen
Abb. 1: EMV-konforme Schirmung Wichtig! Zur Vermeidung von Funktionsstörungen: ist die Abschirmung großflächig unter die Schirmbefestigung zu klemmen, muss die Verbindung zwischen Gehäuse und Abschirmung elektrisch leitend sein, ist der Abstand der Drahtenden ohne Abschirmung möglichst kurz zu halten. Jetter AG... -
Seite 17: Überblick
Modul JX6-CON-Move(-BP) 3 Überblick Überblick Die Module JX6-CON-Move und JX6-CON-Move-BP sind Erweiterungsmodule, die z. B. an die Steuerung JetControl angeschlossen werden können. Beide Modultypen sind Reglermodule, die hauptsächlich zur Ansteuerung von Servoachsen verwendet werden. Dieses Handbuch beschreibt die Servoreglerfunktion. Mit Servoachsen werden geregelte Systeme realisiert. Im Gegensatz zu einem gesteuerten System wird bei einer Regelung eine Rückmeldung über den Istzustand... -
Seite 18: Systembus
3 Überblick JetWeb Zur Realisierung von Achsfunktionen wird das Modul JX6-CON-Move(-BP) in Verbindung mit dem Submodul JX6-SB verwendet. Alle Parameter, die für die Achsen benötigt werden, sind bzw. werden in Registern hinterlegt. Über Registerbefehle kann in verschiedener Art und Weise auf diese... -
Seite 19: Hardwarebeschreibung
Konfigurationsmöglichkeiten, Anschluss- und Schnittstellenbeschreibungen und die Funktion von Anzeigeelementen. Technische Daten Die in diesem Kapitel aufgeführten technischen Daten gelten sowohl für das Modul JX6-CON-Move als auch für das Modul JX6-CON-Move-BP. 4.1.1 Mechanische Abmessungen Die folgenden (nicht maßstabsgetreuen) Darstellungen enthalten die mechanischen Abmessungen des Moduls JX6-CON-Move(-BP). -
Seite 20: Abb. 4: Mechanische Abmessungen Platine Jx6-Con-Move(-Bp)
4 Hardwarebeschreibung JetWeb 173,0 165,0 110,5 172,3 185,7 Abb. 4: Mechanische Abmessungen Platine JX6-CON-Move(-BP) Jetter AG... -
Seite 21: Technische Daten
Modul JX6-CON-Move(-BP) 4.1 Technische Daten 4.1.2 Technische Daten Technische Spezifikation des Moduls JX6-CON-Move(-BP) Allgemeine Technische Daten Modul JX6-CON-Move(-BP) Frontplatte Aluminium Abmessungen (H x B x T in mm) Platine: Frontplatte: 261,8 x 50,5 x Masse 350 g Montage im JetControl-JX6-Gehäuse gesteckt und... -
Seite 22: Technische Daten Digitale Eingänge
4 Hardwarebeschreibung JetWeb Technische Spezifikationen der digitalen Ein- und Ausgänge des Moduls JX6-CON-Move(-BP) Technische Daten Digitale Eingänge Anzahl Nennspannung DC 24 V Spannungsbereich 15 .. 27 V Eingangsstrom ca. 8 mA Eingangswiderstand 3,0 kΩ Eingangsverzögerung ca. 3 ms Signalspannung EIN min. -
Seite 23: Betriebsparameter
Modul JX6-CON-Move(-BP) 4.1 Technische Daten 4.1.3 Betriebsparameter Umweltparameter Parameter Wert Bezug Betriebs- 0 .. +50 °C temperaturbereich Lager- -25 .. +70 °C DIN EN 61131-2, temperaturbereich DIN EN 60068-2-1, DIN EN 60068-2-2 Luftfeuchtigkeit 5 .. 95 %, nicht kondensierend DIN EN 61131-2... - Seite 24 IP20 Einbaulage senkrecht (Ein-/Ausgangsklemmen des Moduls nach oben zeigend) Parameter zur elektrischen Sicherheit Parameter Wert Bezug Schutzklasse DIN EN 61131-2 Isolations- Die Funktionserde ist geräteintern DIN EN 61131-2 prüfspannung mit der Gerätemasse verbunden. Überspannungs- DIN EN 61131-2 kategorie Jetter AG...
-
Seite 25: Emv-Parameter: Störaussendung
Modul JX6-CON-Move(-BP) 4.1 Technische Daten EMV-Parameter: Störaussendung Parameter Wert Bezug Gehäuse Frequenzbereich 30 .. 230 MHz: DIN EN 50081-2, Grenzwert 30 dB (µV/m) in 30 m; DIN EN 55011 Frequenzbereich 230 .. 1.000 MHz: Grenzwert 37 dB (µV/m) in 30 m;... -
Seite 26: Emv-Parameter: Störfestigkeit Prozess- Mess- Und Steuerleitungen
DIN EN 61000-4-6 amplituden- AM 80 % mit 1 kHz, Quellimpedanz 150 Ω, Kriterium A moduliert Burst (schnelle Prüfspannung 2 kV, tr/tn 5/50 ns, DIN EN 50082-2, Transienten) Wiederholfrequenz 5 kHz, DIN EN 61131-2, Kriterium A DIN EN 61000-4-4 Jetter AG... - Seite 27 Modul JX6-CON-Move(-BP) 4.1 Technische Daten EMV-Parameter: Störfestigkeit Netzeingänge und Netzausgänge, Gleichstrom und Wechselstrom Parameter Wert Bezug Hochfrequenz, Frequenzbereich 0,15 .. 80 MHz, DIN EN 61000-6-2, asymmetrisch, Prüfspannung 10 V, DIN EN 61000-4-6 amplituden- AM 80 % mit 1 kHz, Quellimpedanz 150 Ω, Kriterium A...
-
Seite 28: Konfigurationen
Für die Steuerung JetControl 647 gibt es verschiedene Typen von Modulen. Neben dem CPU-Modul kann je nach Gehäusetyp, entsprechend der Anzahl der Steckplätze, eine unterschiedliche Anzahl und Art von Modulen als Erweiterung integriert werden. Folgende Module stehen zur Verfügung: Modul- JX6-CON-Move(-BP)- JX6-I/O64- CPU- bezeichnung Modul Modul... -
Seite 29: Abb. 7: Reglermodul Jx6-Con-Move(-Bp)
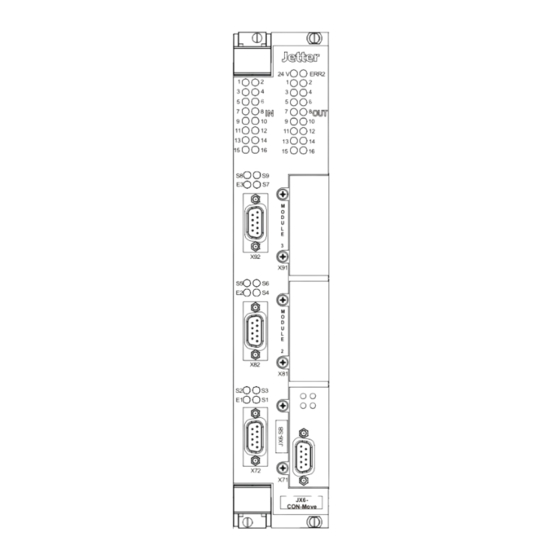
Modul JX6-CON-Move(-BP) 4.2 Konfigurationen Auf einem Modul des Typs JX6-CON-Move oder JX6-CON-Move-BP können wiederum bis zu drei Submodule platziert werden. 24 V ERR2 JX6- CON-Move Frontansicht Seitenansicht Abb. 7: Reglermodul JX6-CON-Move(-BP) Im Unterschied zum Reglermodul JX6-CON-Move können bei Verwendung des Moduls JX6-CON-Move-BP steckplatzübergreifende Funktionen realisiert werden. -
Seite 30: Submodule
4 Hardwarebeschreibung JetWeb 4.2.3 Submodule Platzierung der Submodule Das folgende Bild zeigt die physikalische Anordnung der Submodule auf einem Reglermodul JX6-CON-Move(-BP): Submodul 2 Submodul 3 Submodul 1 JX6-SB Abb. 8: Anordnung der Submodule Verfügbare Submodul-Typen Als Submodul 1 ist ein Modul JX6-SB fest integriert. Dieses Modul realisiert die Ankopplung an den Systembus und wird zur Achs-Anschaltung benötigt. - Seite 31 Modul JX6-CON-Move(-BP) 4.2 Konfigurationen Kombinationsmöglichkeiten Die Kombinationsmöglichkeiten von Submodulen auf einem Reglermodul JX6-CON- Move(-BP) sind variabel - mit einigen Einschränkungen. Da das Modul meist als Servoachse genutzt wird (in Verbindung mit einer Endstufe, z. B. Modul JetMove2xx oder JetMove 6xx) geht man von der Anzahl der benötigten Achsen aus.
-
Seite 32: Das Submodul Jx6-Sb
4.2.4 Das Submodul JX6-SB Das Modul JX6-SB ist, wie schon erwähnt, als Submodul 1 auf dem Modul JX6-CON-Move(-BP) fest integriert. Dieses Modul realisiert die Ankopplung an den Systembus und wird zur Achs-Anschaltung benötigt. Abb. 9: Frontansicht Modul JX6-SB Das Modul JX6-SB ist mit 4 Leuchtdioden ausgestattet, die zur Anzeige verschiedener Betriebs- und Statuszustände dienen. -
Seite 33: Abb. 10: Mechanische Abmessungen Modul Jx6-Sb
Modul JX6-CON-Move(-BP) 4.2 Konfigurationen Die folgenden (nicht maßstabsgetreuen) Darstellungen spezifizieren den Aufbau des Moduls JX6-SB. Abb. 10: Mechanische Abmessungen Modul JX6-SB Jetter AG... -
Seite 34: Abb. 11: Bestückungsplan Modul Jx6-Sb
4 Hardwarebeschreibung JetWeb Abb. 11: Bestückungsplan Modul JX6-SB Jetter AG... -
Seite 35: Anzahl Achsen
Das Reglermodul wird in vielen Applikationen zur Ansteuerung von Servoachsen verwendet. Die maximale Anzahl der konfigurierbaren Achsen ist in der folgenden Tabelle dargestellt. Es wurde dabei davon ausgegangen, dass auf jedem gesteckten Modul JX6-CON-Move(-BP) die maximal mögliche Anzahl von Achsen (also 3) konzipiert wurde. Gehäuse Maximale Anzahl... -
Seite 36: Anschlussbeschreibung
4 Hardwarebeschreibung JetWeb Anschlussbeschreibung 4.3.1 Bestückungsplan Es ist hier der Bestückungsplan des Moduls JX6-CON-Move Rev. 06 [0] dargestellt. Spannungs- Eingänge Eingänge versorgung Reserve 1 - 8 9 - 16 combicon 5.08 combicon 5.08 combicon 5.08 combicon 5.08 Abb. 12: Bestückungsplan JX6-CON-Move... -
Seite 37: Anschlussbild
Modul JX6-CON-Move(-BP) 4.3 Anschlussbeschreibung 4.3.2 Anschlussbild Die folgende Darstellung zeigt ein prinzipielles Anschlussschaltbild für eine Achse 1 mit einem Resolver. Jx6- Resolver CON-Move (-BP) 9 polig SUB-D B1 B2 JetMove Servoregler und Servoverstärker L1 L2 L3 PE L+ R E L- 0V... -
Seite 38: Spannungsversorgung
JetWeb 4.3.3 Spannungsversorgung Das Modul JX6-CON-Move(-BP) hat einen eigenen Anschluss für die 24 V - Versorgungsspannung. Dieser Anschluss ist mit Klemmen, die sich an der Oberseite des Moduls befinden, ausgeführt. Die Spannungsversorgung kommt von einem 24 V - Gleichstromnetzteil (SELV), welches folgende Anforderungen erfüllen muss:... -
Seite 39: Abb. 14: Spannungsversorgung
Modul JX6-CON-Move(-BP) 4.3 Anschlussbeschreibung Nachfolgend ist die Klemmen-Anordnung für die Spannungsversorgung auf der Oberseite des Moduls JX6-CON-Move(-BP) dargestellt: Klemmen 0 V und 24 V = Spannungsversorgung Klemmen 1 bis 16 = jeweils Eingänge/Ausgänge interne Logik Ausgangstreiber Versorgung 24 V interne Logik... -
Seite 40: Digitale Eingänge
4 Hardwarebeschreibung JetWeb 4.3.4 Digitale Eingänge Das Modul JX6-CON-Move(-BP) bietet serienmäßig 16 digitale Eingänge. Die Eingänge sind frei verfügbar. Die Nummerierung der Eingänge auf dem Modul JX6-CON-Move(-BP) wird nach folgendem Schema vorgenommen: Eingang Nummer Eingang 1 Steckplatznummer x 100 + 1... -
Seite 41: Digitale Ausgänge
Modul JX6-CON-Move(-BP) 4.3 Anschlussbeschreibung 4.3.5 Digitale Ausgänge Das Modul JX6-CON-Move(-BP) bietet optional zusätzlich 16 digitale Ausgänge. Die Nummerierung der Ausgänge auf dem Modul JX6-CON-Move(-BP) wird nach folgendem Schema vorgenommen: Ausgang Nummer Ausgang 1 Steckplatznummer x 100 + 1 Ausgang 2... -
Seite 42: Schnittstelle Zum Servoverstärker
JetWeb 4.3.6 Schnittstelle zum Servoverstärker Das Modul JX6-CON-Move(-BP) enthält auf dem Submodulplatz 1 standardmäßig ein Modul JX6-SB. In diesem Modul ist eine Schnittstelle (9-polig SUB-D) integriert, über die der Datenaustausch mit dem Systembus realisiert wird. Über diese Schnittstelle erhält das Modul JX6-CON-Move(-BP) Informationen über den Istzustand der zu steuernden Größe, wertet die vom Resolver erhaltenen Daten... - Seite 43 Modul JX6-CON-Move(-BP) 4.3 Anschlussbeschreibung Wichtig! Die Spezifikation zum Verbindungskabel ist zu beachten: Die maximale Kabellänge beträgt 30 m. Schirmung des Kabels: • der Schirm ist großflächig aufzulegen, • es sind metallisierte Gehäuse zu verwenden, • Schirmung nach folgender Skizze: Jetter AG...
-
Seite 44: Pin-Anordnung Und Pin-Belegung
4 Hardwarebeschreibung JetWeb Pin-Anordnung und Pin-Belegung: SUB-D-Stecker: Kabel vom Servoverstärker (Modul JetMove 2xx) SUB-D-Buchse: auf der Seite des Moduls JX6-CON-Move(-BP) Abb. 18: Schnittstelle zum Servoverstärker (9-polig SUB-D) Signal Bemerkung CMODE0 Modus 0 CANL Signalpegel CAN-low Spannungsversorgung CMODE1 Modus 1 frei... -
Seite 45: Funktion Der Leuchtdioden
Modul JX6-CON-Move(-BP) 4.4 Funktion der Leuchtdioden Funktion der Leuchtdioden Auf der Frontplatte des Reglermoduls JX6-CON-Move(-BP) befinden sich 3 Blöcke mit Leuchtdioden für die Anzeige von verschiedenen Status- und Betriebszuständen. 24 V ERR2 Abb. 19: Leuchtdioden Die folgende Übersicht zeigt die Bezeichnung und die Bedeutung der einzelnen... -
Seite 46: Abb. 20: Leuchtdioden Achszustände
Achse 2 hat Position erreicht; LED leuchtet grün, sobald die Achse 2 das Zielfenster erreicht hat. Die LED erlischt, sobald eine neue Positionierung gestartet wird. LED leuchtet gelb, wenn der negative Endschalter der Achse 2 aktiv war oder aktiv ist. Jetter AG... - Seite 47 Modul JX6-CON-Move(-BP) 4.4 Funktion der Leuchtdioden Funktion der Leuchtdioden S1 bis S9 LED leuchtet gelb, wenn der positive Endschalter der Achse 2 aktiv war oder aktiv ist. Achse 3 hat Position erreicht; LED leuchtet grün, sobald die Achse 3 das Zielfenster erreicht hat.
- Seite 48 4 Hardwarebeschreibung JetWeb Jetter AG...
-
Seite 49: Basisbeschreibung
Modul JX6-CON-Move(-BP) 5.1 Prinzip eines Regelkreises Basisbeschreibung Diese Beschreibung umfasst allgemeine technische und funktionelle Zusammenhänge von Servoreglern. Prinzip eines Regelkreises Als Regelkreis wird ein Wirkungskreis bezeichnet, der im wesentlichen aus einem Regler und einer Regelstrecke besteht. Man unterscheidet offene und geschlossene Regelkreise. - Seite 50 Beim I-Regler ist die Ausgangsgröße gleich dem Integral der Differenz von Soll- und Istwert. Proportional-integral wirkender Regler: PI-Regler Beim PI-Regler setzt sich die Ausgangsgröße aus der verstärkten Differenz und dem Integral der Differenz von Soll- und Istwert zusammen. Jetter AG...
-
Seite 51: Funktion Des Servoregelkreises
Modul JX6-CON-Move(-BP) 5.2 Funktion des Servoregelkreises Funktion des Servoregelkreises Einen durch einen Servoregelkreis gesteuerten Antrieb nennt man Servoantrieb. Mit Servoantrieben wird die Funktion von Achsen realisiert. Dabei ist jeder einzelnen Achse ein eigener Servoregelkreis zugeordnet, in welchem für die Achse die Position, die Geschwindigkeit und der Strom geregelt werden. - Seite 52 Die Messtechnik für die Istwerterfassung muss sicherstellen, dass alle benötigten Daten für die verschiedenen Vergleichsoperationen zur Verfügung stehen. Als Rückmeldungen sind die Istposition, die Istdrehzahl und der Iststrom erforderlich. Die einzelnen Funktionselemente sind in den nachfolgenden Kapiteln ausführlich beschrieben. Jetter AG...
-
Seite 53: Elemente Des Servoregelkreises
Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Elemente des Servoregelkreises Beim Einsatz der Module JX6-CON-Move(-BP) und JetMove 2xx oder JetMove 6xx sieht die Regelkreisstruktur wie folgt aus: JETTER Steuerung JetControl 647 JX6-CON-Move(-BP) Bahn- steuerung Rampen- steuerung System- JetMove Servoverstärker (10) Lage-... - Seite 54 Signale von der Steuerung Rückmeldungssignale (Istwerte) Rampensteilheit (11) Ist-Strom Drehzahlbegrenzung (12) Ist-Drehzahl Soll-Position (13) Ist-Position vor Auswertung Strombegrenzung (14) Ist-Position Signale im Regelkreis Aktuelle Soll-Position Soll-Drehzahl vor Begrenzung Soll-Drehzahl Sollstrom vor Begrenzung Soll-Strom (10) Sollwert für die Motor-Achs- Kombination Jetter AG...
- Seite 55 Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Funktionsprinzip: Der Lageregler erhält folgende Größen als Eingangssignale: – von der Bahn- über die Rampensteuerung die aktuelle Sollposition (5) und – von der Lagegeberauswertung die Istposition (14). Daraus wird vom Lageregler der Geschwindigkeitssollwert als Solldrehzahl (6) ermittelt und an den Drehzahlbegrenzer weitergeleitet.
-
Seite 56: Signalbeschreibung Für Die Regelkreisstruktur
Geschwindigkeitssollwert in Form einer Solldrehzahl dar. Der Wert ist allerdings unbegrenzt und muss im nachfolgenden Begrenzer auf die vorhandenen technischen Verhältnisse angepasst werden. Solldrehzahl Dieses Signal ist das Ausgangssignal vom Drehzahlbegrenzer. Es wird ein digitales Signal ausgegeben, welches die Bewegung der Achse veranlasst. Jetter AG... - Seite 57 Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Sollstrom vor Begrenzung Dieses Ausgangssignal vom Drehzahlregler gibt den Sollstrom für den Momentenregler vor. Der Strom ist proportional zum Moment. Der hier ausgegebene Wert ist wieder unbegrenzt. Sollstrom Dieses Signal ist das Ausgangssignal vom Strombegrenzer. In dieser Variante wird der Strom intern vom Servoverstärker begrenzt.
-
Seite 58: Lageregler
Drehzahlregler unverzüglich eine 0 (als neuer Sollwert) herausgegeben werden. Diese Prozedur ist nur mit einem reinen P-Regler durchführbar. Man unterscheidet zwei generelle Betriebsarten, um einen Lageregler zu betreiben: • keine volle Lageregelung und • volle Lageregelung. Jetter AG... -
Seite 59: Abb. 24: Keine Volle Lageregelung
Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Keine volle Lageregelung Kurzdefinition: Keine volle Lageregelung bedeutet, dass erst am Ende der Positionierung, mit dem erstmaligen Erreichen der Sollposition, geregelt wird. Der Bewegungsverlauf einer Achse ohne volle Lageregelung sieht ungefähr so aus: Soll- Verlauf ohne Störung... -
Seite 60: Abb. 25: Volle Lageregelung
Differenz (= Schleppfehler) sofort mittels der Veränderung der P-Verstärkung des Lagereglers ausgeglichen. Es findet also eine volle Lageregelung während des gesamten Positioniervorgangs statt. Die Wahl dieser Betriebsart ist beispielsweise für die Durchführung von Kreisinterpolationen sehr wichtig, denn sonst kann aus einem Kreis sehr schnell eine Ellipse werden. Jetter AG... - Seite 61 Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Für das Modul JX6-CON-Move(-BP), in Verbindung mit dem Modul JetMove 2xx, gilt: Es wird eine volle Lageregelung über die gesamte Fahrtstrecke realisiert. Dabei wird zu jedem Zeitpunkt die aktuelle Sollposition errechnet und daraufhin die Differenz zwischen Soll- und Istposition gebildet.
-
Seite 62: Servoverstärker
Arbeitet der Geschwindigkeitsregler gut, so ist die Positionsregelung kein großes Problem mehr. Bei großen Massen ist zu beachten, dass diese wie ein I-Anteil der Geschwindigkeit wirken. Hinweis! Im Modul JetMove 2xx wird die Solldrehzahl vom Lageregler zum Drehzahlregler digital übertragen. Jetter AG... - Seite 63 Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Stromregler Der Stromregler ist der wichtigste Regler im gesamten System. Dieser sehr schnelle Regler kann als analoger oder digitaler Regler ausgeführt sein. Das Modul JetMove 2xx arbeitet mit einem digitalen Stromregler des Types PI-Regler. Auf die Regelfaktoren kann Einfluss genommen werden.
-
Seite 64: Istwerterfassung
Leitungen beidseitig und großflächig in einem metallisierten Steckergehäuse geerdet werden. Die folgende Tabelle zeigt die Anwendungsmöglichkeiten einiger Sensoren, um die Istwerterfassung zu realisieren: Sensorik Verwendung Hall-Sensor Kommutierung Tacho Drehzahl Resolver Kommutierung, Drehzahl, Position Inkrementalgeber Geschwindigkeit, Position Absolutwertgeber Drehzahl, Position HIPERFACE Kommutierung, Drehzahl, Position Jetter AG... -
Seite 65: Ermittlung Der Istwerte
Bewegung der Achse entsprechen. HIPERFACE sind moderne Gebersysteme, die analoge Signale als Positionsrückmeldungen erzeugen und eine Vielfachauswertung ermöglichen. Im Zusammenwirken mit dem Modul JX6-CON-Move(-BP) werden zur Zeit Resolver eingesetzt. Die Nutzung von HIPERFACE ist in Vorbereitung. Jetter AG... -
Seite 66: Abb. 26: Spulen Des Resolvers
Meßwicklung. Die Vorgehensweise und der Ablauf sind bei beiden Statorspulen identisch. Da aber die zweite Statorspule räumlich um 90° versetzt ist, beschreibt die Amplitude der induzierten Spannung für diese Statorspule eine Cosinusfunktion; wieder in Abhängigkeit von der Winkelstellung der Läuferwicklung zur Meßwicklung. Jetter AG... -
Seite 67: Abb. 27: Signale Im Resolver
Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises In der Auswerte-Elektronik werden die Signale erfaßt, verarbeitet, gewandelt und gefiltert. Als Ergebnis wird der berechnete Lagewinkel α bereitgestellt. Damit kann die Position innerhalb einer Umdrehung exakt reproduziert werden. Erreger-Signale Mess-Signale Statorspule 1 Mess-Signale Statorspule 2 Abb. -
Seite 68: Abb. 28: Signalverlauf Mehrpoliger Resolver
Der typische Signalverlauf sieht dann ungefähr wie folgt aus: 0° 360° Abb. 28: Signalverlauf mehrpoliger Resolver In der Praxis werden oft werden sogenannte „Eingang“-Resolver eingesetzt. Diese Resolver liefern eine Sinus-Cosinus-Kurve bei einer mechanischen Umdrehung der Welle. Typischer Signalverlauf: 0° 360° Abb. 29: Signalverlauf Eingang-Resolver Jetter AG... - Seite 69 Welle als Kreis betrachtet, der wiederum in 4.096 Schritte (Inkremente) aufgeteilt wird. Dies entspricht dann den 12 Bit. Im Zusammenhang mit den Modulen JX6-CON-Move(-BP) und JetMove 2xx kommen Standard-Resolver zum Einsatz. Man erhält also von diesen Resolvern ein Positionssignal, das über eine Umdrehung absolut die Winkellage ermittelt, aber keine Information über die bereits...
- Seite 70 Anforderungen parametriert werden. Mit einem HIPERFACE können nicht nur die Geberdaten übertragen und verarbeitet werden. Viele zusätzliche Funktionen sind standardmäßig implementiert. Diese Funktionen sind als Programmroutinen im Modul hinterlegt und werden über Befehle aufgerufen. Nähere Informationen: siehe unter http://www.stegmann.de Jetter AG...
-
Seite 71: Abb. 30: Signale Eines Inkrementalgebers
Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Inkrementalgeber Ein typischer Inkrementalgeber für die Erfassung von Drehbewegungen besteht aus einer Glasscheibe mit wechselweise aufgedruckten transparenten und farbigen, schmalen, radialen Linien. Für die Erfassung linearer Bewegungen wird ein Glasmaßstab benutzt, das Funktionsprinzip ist gleich. -
Seite 72: Abb. 31: Differenzsignal Eines Inkrementalgebers
Bei 5 V - Differenzsignalgebern werden zwei zueinander invertierte Signale über zwei Leitungen gesendet. Da die Leitungen parallel verlaufen, sind die möglicherweise auftretenden Potentialstörungen sehr wahrscheinlich auf beiden Leitungen gleich. Somit bleibt die Differenz zwischen den beiden Spannungen identisch. Jetter AG... -
Seite 73: Abb. 32: Auswertung Eines Inkrementalgebers
Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises Die Logik des Reglermoduls kann aus den Impulsen der Kanäle K1 und K2 sowohl Positions-, als auch Richtungsinformationen erkennen. Die Impulse der beiden Kanäle sind um 90 Grad (Viertel-Periode) phasenverschoben. Die auf den Gebern angegebene Schrittzahl wird meist 4-fach ausgewertet. Jede Flanke des Gebers bewirkt eine Änderung der Istposition. -
Seite 74: Auflösung
Auflösungen ableiten: Anzahl der Umdrehungen Maximale Wortbreite Codescheiben Auflösung 1 (Single-Turn) 4.096 12 Bit 2 (Multi-Turn) 65.536 16 Bit 3 (Multi-Turn) 16 x 16 1.048.576 20 Bit 4 (Multi-Turn) 16 x 16 x 16 16.777.216 24 Bit Jetter AG... - Seite 75 Modul JX6-CON-Move(-BP) 5.3 Elemente des Servoregelkreises In der Praxis haben sich SSI-Absolutwertgeber durchgesetzt. SSI bedeutet „Synchron Serielles Interface“ und ist eine patentierte Schnittstelle für absolute Winkelcodierer. Die Prozedur der Signalerfassung, -umwandlung und -übertragung ist eindeutig festgeschrieben. Ein weiterer, wesentlicher Vorteil dieser Schnittstelle liegt darin, dass die Steuerung den Ablauf der Datenübertragung (Zeitpunkt und...
-
Seite 76: Referenzfahrten
Endschaltern, meist in der Nähe eines Endschalters. Die Referenzfahrt läuft stets nach einer definierten Vorgehensweise ab. Es muss zumindest die Fahrtrichtung festgelegt werden, in der nach dem Referenzschalter gesucht wird. Die Endschalter dienen als Begrenzung bzw. als Umkehrposition zur Fahrtrichtungsänderung. Jetter AG... - Seite 77 In diesem Fall müssen die eventuell unterschiedlichen Polaritäten von End- und Referenzschaltern abgeglichen werden. Referenzfahrten mit dem Modul JX6-CON-Move(-BP) Es gibt mehrere Möglichkeiten, mit dem Modul JX6-CON-Move(-BP) eine Referenzfahrt für eine Achse durchzuführen: • Es ist möglich, mit Hilfe der Programmierbefehle ein eigenes Programm für die Durchführung einer Referenzfahrt zu schreiben.
- Seite 78 Referenzschalter ist aktiv der Referenzschalter, der den Referenzpunkt der Achse hardwaremäßig definiert, wurde angefahren Referenzfahrtfehler während einer automatischen Referenzfahrt der Achse ist ein Fehler aufgetreten BUSY das Reglermodul ist "beschäftigt"; dieses Signal wird ausgegeben, wenn automatische Referenzfahrten durchgeführt werden Jetter AG...
-
Seite 79: Ablauf Der Referenzfahrt-Routinen
Modul JX6-CON-Move(-BP) 5.4 Referenzfahrten Weitere Register, die für Referenzfahrten relevant sind: Register-Nr. Inhalt 1xy002 Sollposition der Achse 1xy003 Sollgeschwindigkeit der Achse 1xy009 Istposition der Achse 1xy071 Soll- und Istposition gleichzeitig setzen Ablauf der Referenzfahrt-Routinen: Referenz setzen Kommando 3 Der Referenzpunkt wird an der aktuellen Position der Achse gesetzt. -
Seite 80: Ablauf Der Automatischen Referenzfahrt-Routinen
Hardware-Endschalter betätigt wird, und zwar ohne den Referenzschalter zu finden: – dann wird die Referenzfahrt beendet, intern wird die Sollposition gleich der Istposition gesetzt, die Regelung wird abgeschaltet, das Fehlerbit 12 im Statusregister wird gesetzt. Jetter AG... -
Seite 81: Automatische Referenzfahrt Positive Richtung, Erst Endschalter Und Danach Referenzschalter Beachten
Modul JX6-CON-Move(-BP) 5.4 Referenzfahrten Automatische Referenzfahrt negative Richtung, Referenzschalter Kommando 10 sofort beachten Die Referenzfahrt wird, ausgehend von der aktuellen Position, in negative Fahrtrichtung gestartet. Sollte dabei zuerst der negative Hardware-Endschalter betätigt werden, so dreht die Achse um und fährt in die positive Richtung weiter, bis: •... - Seite 82 Istposition gesetzt, die Regelung wird abgeschaltet, das Fehlerbit 12 im Statusregister wird gesetzt. Der Vorteil der beiden letzten Varianten (Kommando 11 und 12) liegt darin, dass man sich immer von der gleichen Seite an den Referenzschalter annähert. Dadurch wird das Referenzsignal eindeutig bestimmt. Jetter AG...
-
Seite 83: Registerbeschreibung
Achsnummern Die erste Ziffer definiert die Nummer des Steckplatzes, auf dem sich das Erweiterungsmodul JX6-CON-Move(-BP) befindet. Die zweite Ziffer definiert die Nummer der Achse, welche auf dem Modul JX6-CON-Move(-BP) angesprochen werden soll. Folgendes Schema veranschaulicht die Achsnummerierung: Achsnummer 1 = Achse 1... -
Seite 84: Registernummer Der Achse
1 x y zzz Registernummer der Achse 000 … 999 Achsnummer 1 = Achse 1 2 = Achse 2 3 = Achse 3 4 = virtuelle Masterachse Modulsteckplatz-Nummer 2 ... 8 Kennung Definiert: 1 Abb. 35: Codierung der Registernummer Jetter AG... -
Seite 85: Allgemeine Register
Wert nach Reset 1.024 (= Bit 10 gesetzt) Dieses Register gibt Auskunft über den aktuellen Status des Moduls JX6-CON-Move(-BP). Das bedeutet, der Zustand von wichtigen Systemfunktionen wird angezeigt. Durch das Beschreiben einzelner Bits dieses Registers können einige Funktionen ein- bzw. ausgeschaltet werden. Nachfolgend wird die Bedeutung der einzelnen Bits (normalerweise für den Fall, dass das Bit gesetzt, d.h. -
Seite 86: Bedeutung Der Statusbits
Achse ist weitergefahren oder steht an dieser Position. Bit 8: Hardware-Endschalter war oder ist aktiv während eines Positioniervorgangs wurde der Hardware- Endschalter angefahren; die Achse ist weitergefahren oder steht an dieser Position. Bit 9: Lageregler eingeschaltet der Lageregler (= Positionsregler) ist eingeschaltet. Jetter AG... -
Seite 87: Bit 14: Funktion Software-Endschalter Aktiviert
Modus, dass die Lage der Achse nach dem Erreichen einer Sollposition geregelt wird, ist eingeschaltet; (*) dieser Modus ist die Standardeinstellung. Bit 11: Achsfreigabe der Servoregler wurde vom Modul JX6-CON-Move(-BP) freigeschaltet; erst jetzt ist eine Positionierung der Achse möglich. Bit 12: Referenzfahrtfehler während einer automatischen Referenzfahrt der Achse ist ein Fehler... -
Seite 88: Bit 22: Fehler Bei Fortlaufender Interpolation
6 Registerbeschreibung JetWeb Bit 22: Fehler bei fortlaufender Interpolation das Reglermodul ist aufgrund zu kurzer Bahnstücke nicht in der Lage, Vorausberechnungen durchzuführen. Bit 23: reserviert Jetter AG... -
Seite 89: Kommandoregister
Modul JX6-CON-Move(-BP) 6.2 Allgemeine Register 6.2.2 Kommandoregister Register 1xy001: Kommandoregister Funktion Beschreibung Lesen aktuelles oder zuletzt erteiltes Kommando Schreiben startet die Ausführung eines neuen Kommandos Wertebereich 0 .. 255 Wert nach Reset Das Beschreiben dieses Registers mit Werten zwischen 0 und 255 startet die Ausführung einer Funktion, die über ein entsprechendes Kommando definiert wird. -
Seite 90: Referenz Setzen
Register Sollposition (1xy002) und Istposition (1xy009) aktualisiert und außerdem wird im Statusregister das Bit 0 (Referenz gesetzt) aktiviert, • tritt während der automatischen Referenzfahrt ein Fehler auf, so wird im Statusregister 1xy000 das Bit 12 (Referenzfahrtfehler) gesetzt. Jetter AG... -
Seite 91: Automatische Referenzfahrt Positive Richtung, Referenzschalter Sofort Beachten
Modul JX6-CON-Move(-BP) 6.2 Allgemeine Register Automatische Referenzfahrt positive Richtung, Referenzschalter sofort beachten die Referenzfahrt wird in positive Fahrtrichtung gestartet, das Anfahren des Referenzschalters wird sofort beachtet; sollte dabei der positive Hardware-Endschalter betätigt werden, so dreht die Achse um und fährt in die negative Richtung weiter, bis: •... -
Seite 92: Automatische Referenzfahrt Negative Richtung, Erst End- Dann Referenzschalter Beachten
Signal am Starteingang startet eine Relativpositionierung. Relativpositionierung mit Starteingang - AUS (*) der Modus des Positionierens mit Hilfe eines Starteinganges wird wieder ausgeschaltet. Am Referenzpunkt halten - EIN (*) während einer Referenzfahrt stoppt die Achse am Referenzpunkt. Jetter AG... -
Seite 93: Kombinierte Kreis- Und Linearinterpolation
Modul JX6-CON-Move(-BP) 6.2 Allgemeine Register Am Referenzpunkt halten - AUS die Achse hält während einer Referenzfahrt nicht am Referenzpunkt Nächste Interpolation anhängen die nächste Interpolation wird an die gerade laufende ohne Unterbrechung angehängt. Kombinierte Kreis- und Linearinterpolation die nächste Kreisinterpolation wird mit einer Linearinterpolation kombiniert. -
Seite 94: Master-Slave-Konfiguration 4 Für Linearinterpolation
Register 1xy075 definiert ist, abgearbeitet wird. Nachlaufregler: Tabelle mit Zeitindex - AUS (*) der Nachlaufregler-Modus über Tabelle mit Zeitindex wird wieder ausgeschaltet. Nachlaufregler: Überlauf - Slave nicht korrigieren beim Überlauf des Masters erfolgt keine Korrektur des Slaves. Nachlaufregler: Überlauf - Slave korrigieren (*) Jetter AG... - Seite 95 Start- und Stopprampen haben linearen Charakter. Sinusquadrat-Rampen - EIN (*) Start- und Stopprampen sind Sinusquadrat-Rampen. 80-93: reserviert Master-Slave-Konfiguration 5 für Linearinterpolation alle 3 Achsen eines Moduls JX6-CON-Move(-BP) sind an einer Linearinterpolation beteiligt. 95 - reserviert 106: 107: Modus 3D-Kreisinterpolation - EIN mit dem Kommando wird der Modus 3D-Kreisinterpolation eingeschaltet.
- Seite 96 Die Skalierungsfunktion der Tabelle wird wieder ausgeschaltet. 141: reserviert 142: Spline-Interpolation: Neuberechnung der Spline- Länge das Kommando startet die Neuberechnung der Spline-Länge. Diese Prozedur ist notwendig, wenn eine zuvor berechnete Spline- Interpolation verändert wurde. 143 - reserviert 255: Jetter AG...
-
Seite 97: Steuerregister
Modul JX6-CON-Move(-BP) 6.2 Allgemeine Register 6.2.3 Steuerregister Register 1xy004: Steuerregister Funktion Beschreibung Lesen aktuelle Einstellungen Schreiben Definition neuer Einstellungen und Funktionsauswahlen Wertebereich bitcodiert, Bit 0 .. Bit 23 Wert nach Reset Mit Hilfe dieses Registers ist es möglich, bestimmte Konfigurationen einzustellen und Funktionen vorzuwählen bzw. - Seite 98 6 Registerbeschreibung JetWeb Bit 5 reserviert Bit 9 Bit 10: Referenzfahrt Referenzfahrt unter Beachtung des 0-Signals vom Resolver und des Referenzschalters (*) Referenzfahrt nur unter Beachtung des Referenzschalters Bit 11 reserviert Bit 23: Jetter AG...
-
Seite 99: Endstufen-Statusregister
Modul JX6-CON-Move(-BP) 6.2 Allgemeine Register 6.2.4 Endstufen-Statusregister Anzahl der initialisierten Register 1x1247: JetMove-Endstufen Funktion Beschreibung Lesen aktuelle Anzahl der initialisierten JetMove- Endstufen Schreiben nicht zulässig Wertebereich 0 .. 3 Wert nach Reset Aus diesem Register kann die Anzahl der erkannten und somit initialisierten JetMove-Endstufen ausgelesen werden. - Seite 100 6 Registerbeschreibung JetWeb Register 1x4000: Globales Statusregister Funktion Beschreibung Lesen aktueller Status des Moduls JX6-CON-Move(-BP) Schreiben nicht zulässig Wertebereich bitcodiert, Bit 0 .. Bit 15 Wert nach Reset Aus diesem Register können globale Statusinformationen ausgelesen werden. Bedeutung der Statusbits: Bit-Nr.:...
-
Seite 101: Allgemeine Konfigurationsregister
Modul JX6-CON-Move(-BP) 6.3 Allgemeine Konfigurationsregister Allgemeine Konfigurationsregister Die allgemeinen Konfigurationsregister sind ebenfalls Systemregister und werden benötigt, um organisatorische Grundfunktionen realisieren zu können. Position des positiven Register 1xy014: Software-Endschalters Funktion Beschreibung Lesen Wert der aktuellen Position Schreiben Definition einer neuen Position für den positiven... - Seite 102 Endschalter, sowohl in positive als auch in negative Richtung. Durch die Abfrage von Bit 7 des Statusregisters kann der Status vom positiven und negativen Software-Endschalter abgefragt werden. Ein gesetztes Bit 7 bedeutet, dass einer der beiden Software-Endschalter aktiv war oder ist. Jetter AG...
- Seite 103 Wert nach Reset aktuelle Versionsnummer des Betriebssystems Aus diesem Register kann die Versionsnummer des Betriebssystems des Moduls JX6-CON-Move(-BP) ausgelesen werden. Diese Nummer ist bei technischen Anfragen anzugeben. Interpretation des Registerinhalts: Steht im Register 1x1099 beispielsweise der Wert 2.900, so handelt es sich um die Versionsnummer 2.900.
-
Seite 104: Allgemeine Achsregister
Fahrverhalten der Achse bestimmen zu können. Ebenso werden diese Register im normalen Betrieb benutzt, um Positionierungen jeder Art durchzuführen. Nachfolgend werden diese Register und die damit im Zusammenhang stehenden Funktionen detailliert beschrieben. Die Kurzübersicht über alle Register befindet sich im Anhang. Jetter AG... -
Seite 105: Positionsregister Für Achsen
Modul JX6-CON-Move(-BP) 6.4 Allgemeine Achsregister 6.4.1 Positionsregister für Achsen In diesem Kapitel sind die Register beschrieben, die im Zusammenhang mit Achspositionen stehen. Die den Schleppfehler betreffenden Register sind abhängig von der Endstufe und sind deswegen in Kapitel 6.6.3 und Kapitel 6.7.2 beschrieben. - Seite 106 Startet die Positionierung der Achse auf die (relative) Position 100, d.h. fahre 100 Inkremente weiter. Voraussetzung: Im Kommandoregister wurde zuvor auf den Modus „Relative Positionierung umgeschaltet. Beispiel 3) Anzeige der THEN DISPLAY_REG (0, 1, 1xy002] Sollposition Zeigt die momentane Sollposition der Achse auf dem Bediengerät links oben Jetter AG...
-
Seite 107: Abb. 37: Zielfensterbereich
Modul JX6-CON-Move(-BP) 6.4 Allgemeine Achsregister Register 1xy007: Zielfensterbereich Funktion Beschreibung Lesen Wert des aktuellen Zielfensterbereiches Schreiben Definition eines neuen Zielfensterbereiches in Inkrementen Wertebereich 0 .. +8.388.607 (theoretischer Wert, siehe *) Wert nach Reset Durch die Verwendung eines Zielfensterbereiches kann ein schnellerer Programmablauf erreicht werden. - Seite 108 Man sollte den Zielfensterbereich allerdings nicht zu groß wählen, sonst kann es zu funktionellen Problemen kommen. In der Praxis werden für dieses Register oft Werte von 20 - 40 benutzt, immer in Abhängigkeit von der gewünschten Funktion der Applikation. Jetter AG...
-
Seite 109: Istposition Der Achse
Modul JX6-CON-Move(-BP) 6.4 Allgemeine Achsregister Register 1xy009: Istposition der Achse Funktion Beschreibung Lesen Wert der aktuellen Istposition in Inkrementen Schreiben nicht zulässig Wertebereich -8.388608 .. +8.388.607 Wert nach Reset Aus diesem Register kann die momentane Istposition der Achse ausgelesen werden. Die Maßeinheit ist Inkrement. -
Seite 110: Soll- Und Istposition Gleichzeitig Setzen
Der Registerinhalt vom Register 1xy009 (Istposition der Achse) wird nach folgender Formel neu berechnet und in das Register eingetragen: Register 1xy009 = AlteIstposition + (Registerinhalt 1xy071 - AlteSollposition) Auf diesem Weg wird eine neue Referenzposition definiert, ohne Inkremente zu verlieren. Jetter AG... -
Seite 111: Geschwindigkeitsregister Für Achsen
Modul JX6-CON-Move(-BP) 6.4 Allgemeine Achsregister 6.4.2 Geschwindigkeitsregister für Achsen In diesem Kapitel sind alle Register beschrieben, die im Zusammenhang mit Geschwindigkeiten von Achsen stehen. Register 1xy003: Sollgeschwindigkeit der Achse Funktion Beschreibung Lesen Wert der aktuellen maximalen Sollgeschwindigkeit der Achse Schreiben Übergabe einer neuen Sollgeschwindigkeit für... -
Seite 112: Bezugswert Zur Sollgeschwindigkeit Der Achse
100% entsprechen der maximalen Geschwindigkeit der Achse 1xy021 = 1xy018 • die Werte in Register 1xy003 sind in U/min angegeben (Reset-Einstellung) • das Register 1xy018 enthält die Maximalgeschwindigkeit der Servo-Motor-Kombination in U/min Es können aber auch andere Bezugswerte im Register 1xy021 definiert werden. Jetter AG... - Seite 113 Modul JX6-CON-Move(-BP) 6.4 Allgemeine Achsregister Nachfolgend sind einige Beispiele zur Benutzung der beiden Register 1xy003 und 1xy021 angeführt. Beispiel 1) Sollgeschwindig- THEN REGISTER_LOAD (1xy021, 1000) keit in ‰ Bewirkt die Einstellung von Promille als Bezugswert für die Sollgeschwindigkeit. THEN REGISTER_LOAD (1xy003, 20) Führt zur Fahrt im Schleichgang mit ca.
- Seite 114 Im Register 1xy018 wurde die Maximalgeschwindigkeit der Servo-Motor- keit in U/min Kombination mit 6.000 U/min angegeben. Dieser Wert wird in das Register 1xy021 übernommen. THEN REGISTER_LOAD (1xy003, 6000) Die Sollgeschwindigkeit der Achse ist gleich der Maximalgeschwindigkeit der Servo-Motor-Kombination (in diesem Fall 6.000 U/min). Jetter AG...
-
Seite 115: Abb. 38: Startrampe
Modul JX6-CON-Move(-BP) 6.4 Allgemeine Achsregister Register 1xy005: Startrampe Funktion Beschreibung Lesen aktueller Zeitwert der Startrampe Schreiben Definition eines neuen Zeitwertes für die Startrampe in ms Wertebereich 0 .. 32.767 Wert nach Reset 1.000 ms Die Startrampe stellt die Verzögerungszeit dar, mit welcher die Achse, aus dem Stillstand heraus, die Maximalgeschwindigkeit erreicht. -
Seite 116: Abb. 39: Stopprampe
1.000 3.000 4.000 Abb. 39: Stopprampe Der Wert 0 ist dabei ein theoretischer Wert, da es rein physikalisch nicht möglich ist, ohne Verzögerung zu bremsen. Außerdem wird in der Praxis auch hier eher ein weiches, ruckfreies Abbremsen angestrebt. Jetter AG... -
Seite 117: Register Für Den Lageregler
Modul JX6-CON-Move(-BP) 6.5 Register für den Lageregler Register für den Lageregler In diesem Kapitel sind die Register beschrieben, die im Zusammenhang mit dem Lageregler stehen und nicht abhängig von der Endstufe sind. Der Aufbau und die Funktionsweise eines Lagereglers wurde bereits in der Basisbeschreibung Kapitel 5.3.1: "Lageregler", Seite 58, erklärt. -
Seite 118: Istgeschwindigkeit Des Lagereglers
Glättungskonstante zur Istgeschwindigkeit des Lagereglers Wertebereich 1 .. +255 Wert nach Reset 12 ms Dieses Register wird verwendet, um die Istgeschwindigkeit des Lagereglers zu beeinflussen. Hinweis! Dieses Register ist nur für die physikalische Achse 1 des Moduls JX6-CON-Move(-BP) verfügbar. Jetter AG... -
Seite 119: Moduswahl Für Lageregelung
Lageregelung Schreiben Definition eines neuen Lageregelungsmodus Wertebereich 0, 2 Wert nach Reset Der Lageregler auf dem Modul JX6-CON-Move(-BP) kann in verschiedenen Modi betrieben werden. Folgende Zuordnungen gelten: • Parametrierung Register 1xy098 mit 0: entspricht dem Lageregelungsmodus 0, • Parametrierung Register 1xy098 mit 2: entspricht dem Lageregelungsmodus 2. -
Seite 120: Endstufen-Register Jetmove 2Xx
Zusammenwirken beider Module zu gewährleisten, ist eine Kommunikation bzw. ein Datenaustausch zwischen beiden Modulen nötig. Dazu wird auf der Seite des Moduls JX6-CON-Move(-BP) unter anderem der Registerbereich von 1xy300 bis 1xy399 genutzt. Diese Register enthalten einerseits Statusinformationen, die vom Modul JetMove 2xx kommen und andererseits Betriebsarten- und Parametrierungsinformationen, die an das Modul JetMove 2xx übertragen werden müssen. -
Seite 121: Zwischenkreis-Spannung
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Register 1xy301: Geräte-Nennstrom Funktion Beschreibung Lesen Wert des aktuellen Geräte-Nennstroms in 0,1 A effektiv Schreiben nicht zulässig Wertebereich 30, 40, 60, 100, 150 Wert nach Reset entspricht den Angaben auf dem Geräte- Typenschild Aus diesem Register kann der Nennstrom des Gerätes ausgelesen werden. Der ausgelesene Wert muss mit dem Faktor 0,1 multipliziert werden, um den realen Wert zu erhalten. -
Seite 122: Motor-Temperatur
Register die aktuelle Motor-Temperatur in °C ausgelesen werden. Ist der Motor mit einem digitalen Temperaturschalter ausgestattet, dann werden in diesem Register 2 Werte ausgegeben, die wie folgt zu interpretieren sind: • Wert 1: Schalter geschlossen • Wert 155: Schalter geöffnet. Jetter AG... -
Seite 123: Ballast-Auslastung
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Register 1xy363: Geräte-Temperatur Funktion Beschreibung Lesen aktueller Wert der Geräte-Temperatur in °C Schreiben nicht zulässig Wertebereich 0 .. +150 Wert nach Reset 0 °C Aus diesem Register kann die aktuelle Geräte-Temperatur ausgelesen werden. Register 1xy364:... -
Seite 124: Motorwellenstellung
Bit 0 .. Bit 15, unsigned integer Wert nach Reset Aus diesem Register können Statusinformationen ausgelesen werden. Jedes Bit des Registers steht für eine bestimmte Funktion. Bedeutung der Statusbits: Bit-Nr. Zustand Bedeutung Bremse geschlossen Bremse geöffnet (im manuellen und im automatischen Modus) Jetter AG... - Seite 125 Die Fehler werden auf der 7-Segment-Anzeige des Moduls JetMove 2xx mit ihrer entsprechenden Fehlernummer angezeigt und als Meldung (Bit gesetzt) in die o.g. Register des Moduls JX6-CON-Move(-BP) übertragen. Eine Warnung wird als blinkender Punkt dargestellt. Durch die eindeutige Zuordnung von Bit- und Fehler-/ Warnungs-Nummer und die Referenzliste (im Anhang befindet sich zusätzlich eine...
- Seite 126 Bedeutung der Fehlerbits: Bit- Fehler- Bedeutung Nr.: Nr.: Geräteeingangsstrom ist zu hoch Software-Endschalter erreicht oder überschritten Hardware-Endschalter erreicht oder überschritten Fehlerreaktion der Steuerung (dem Antrieb übergeordnet) nicht rechtzeitig eingetroffen Unterspannung Zwischenkreis mit einstellbarem Minimalwert Überspannung Zwischenkreis mit einstellbarem Maximalwert Jetter AG...
- Seite 127 Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Bit- Fehler- Bedeutung Nr.: Nr.: Antrieb blockiert (Auslösezeit für Blockierüberwachung über Register 1xy346 einstellbar) Schleppfehler (der Schleppfehler hat den in Register 1xy019 definierten Grenzwert und die in Register 1xy342 definierte Zeit überschritten) DC 24 V-Stromversorgung zu niedrig...
- Seite 128 Geräte-Temperatur Warnschwelle ca. 70 °C (gerätespezifisch) Motor-Temperatur Warnschwelle ca. 100 °C (gerätespezifisch) Überlast PFC (Zwischenkreis-Spannung <340 V, wenn PFC aktiv) Geräteeingangsstrom ist zu hoch Sensor auf Platine warnt vor zu hoher Temperatur Im Anhang befindet sich eine Kurzübersicht zu Fehlern und Warnungen. Jetter AG...
-
Seite 129: Softwareversion
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Register 1xy399: Softwareversion Funktion Beschreibung Lesen aktuelle Versionsnummer der JetMove 2xx Endstufen-Software Schreiben nicht zulässig Wertebereich 0 .. 16.383 Wert nach Reset Auslieferungszustand Aus diesem Register kann die Versionsnummer der JetMove 2xx-Software ausgelesen werden. -
Seite 130: Betriebsarten-Register
6 Registerbeschreibung JetWeb 6.6.2 Betriebsarten-Register Die Benutzung dieser Gruppe von Registern ermöglicht es, von seiten des Moduls JX6-CON-Move(-BP) die Betriebsarteneinstellungen des Moduls JetMove 2xx zu verändern. Register 1xy340: Betriebsmodus Funktion Beschreibung Lesen aktuell angewählter Betriebsmodus Schreiben Definition eines neuen Betriebsmodus Wertebereich bitcodiert, Bit 0 .. - Seite 131 Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Betriebsmodus Register 1xy341: 7-Segment-Anzeige Funktion Beschreibung Lesen aktuell angewählter Betriebsmodus für die 7-Segment-Anzeige Schreiben Definition eines neuen Betriebsmodus für die 7-Segment-Anzeige Wertebereich 0 .. 1 Wert nach Reset In diesem Register kann der Betriebsmodus für die 7-Segment-Anzeige des Moduls JetMove 2xx vorgewählt werden.
-
Seite 132: Bedeutung
Nur der Drehzahl- und der Stromregler sind aktiv (der Drehzahl-Sollwert wird im Register 1xy011 definiert) Der Lage-, der Drehzahl- und der Stromregler sind aktiv Hinweis! Die Einträge in diesem Register dürfen nur bei deaktivierter Regelung verändert werden. Jetter AG... -
Seite 133: Schleppfehler
Um eine hohe Genauigkeit bei Achsbewegungen zu gewährleisten, sollte der Schleppfehler möglichst klein sein. Er sollte um 0 schwingen, d.h. er sollte nie nur negativ oder nur positiv sein. Hinweis! Die Schleppfehlerauswertung ist außerhalb des Moduls JX6-CON-Move(-BP) realisiert. Siehe folgende Seite, Beschreibung Register 1xy020 „Schleppfehlergrenze“. Jetter AG... - Seite 134 Schleppfehler wird dann erkannt, wenn der Wert in Register 1xy019 größer wird, als der Wert in Register 1xy020. Für das Zusammenwirken der Module JX6-CON-Move(-BP) und JetMove 2xx gilt: Die Informationen zum Schleppfehler (Registerinhalte 1xy019 und 1xy020) werden vom Reglermodul JX6-CON-Move(-BP) an die Endstufe JetMove 2xx übergeben, dort verarbeitet und ausgewertet.
-
Seite 135: Register Für Den Lageregler
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx 6.6.4 Register für den Lageregler Register 1xy010: P-Verstärkung des Lagereglers Funktion Beschreibung Lesen Wert der aktuellen P-Verstärkung des Lagereglers Schreiben Definition eines neuen Wertes für die P-Verstärkung des Lagereglers Wertebereich 0 .. 65.535 Wert nach Reset Mit Hilfe dieses Registers ist die Lageregelung auf die Sollposition beeinflussbar. -
Seite 136: Register Für Den Digitalen Drehzahlregler
Stromregler regler Strom- Begrenzer (12) von der Lagegeberauswertung Abb. 40: Signale des digitalen Drehzahlreglers Strombegrenzung Solldrehzahl Sollstrom vor Begrenzung Sollstrom (12) Ist-Drehzahl Der Drehzahlregler ist als PI-Regler ausgeführt. Die P-Verstärkung und der I-Anteil lassen sich separat einstellen. Jetter AG... -
Seite 137: P-Verstärkung Des Digitalen Drehzahlreglers
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx P-Verstärkung des digitalen Register 1xy024: Drehzahlreglers Funktion Beschreibung Lesen Wert der aktuellen P-Verstärkung des digitalen Drehzahlreglers Schreiben Definition eines neuen Wertes für die P-Verstärkung des digitalen Drehzahlreglers Wertebereich 0 .. +32.767 Wert nach Reset 2.560 (entspricht K... -
Seite 138: I-Verstärkung Des Digitalen Drehzahlreglers
Der Strombegrenzer ist im Servoregelkreis direkt dem Drehzahlregler nachgeschaltet. Über dieses Register ist eine Einstellung der Begrenzung des Ausgangsstromes aus dem digitalen Drehzahlregler möglich. Da der Strom proportional zum Drehmoment ist, kann der Anwender somit über die Steuerung Einfluss auf das Drehmoment des Motors nehmen. Jetter AG... -
Seite 139: Preset-Wert Für Den Drehzahlregler
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Preset-Wert für den Register 1xy306: Drehzahlregler Funktion Beschreibung Lesen aktueller Preset-Wert des Drehzahlreglers Schreiben Definition eines neuen Preset-Wertes für den Drehzahlregler Wertebereich -16.384 .. +16.383 Wert nach Reset Mit diesem Parameter kann das Lastmoment einer hängenden Last kompensiert werden. -
Seite 140: Konfigurationsregister Für Achsen
Aus diesem Register kann die Geberauflösung des Resolvers ausgelesen werden. Nach einem Reset sollte hier der Wert 4.096 enthalten sein. Weitere Informationen zu Gebern und deren Funktionsweise befinden sich in der Basisbeschreibung im Kapitel 5.3.3: "Istwerterfassung", Seite 64. Jetter AG... -
Seite 141: Maximalgeschwindigkeit Der Servo-Motor-Kombination
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Maximalgeschwindigkeit der Register 1xy018: Servo-Motor-Kombination Funktion Beschreibung Lesen Wert der aktuellen Maximalgeschwindigkeit in U/min Schreiben Definition einer neuen Maximalgeschwindigkeit für die Servo-Motor-Kombination in U/min Wertebereich 120 .. 12.000 Wert nach Reset 6.000 U/min Dieses Register muss immer zum Abgleich einer Servoachse parametriert werden. -
Seite 142: Register Mit Parameterinformationen
6.6.7 Register mit Parameterinformationen Diese Gruppe von Registern ermöglicht eine direkte Einflussnahme auf das Regelverhalten der Endstufe (Modul JetMove 2xx). Dazu werden diese Register auf der Seite des Moduls JX6-CON-Move(-BP) mit den gewünschten Werten beschrieben. Maximaler Geräte- Register 1xy302: Ausgangsstrom... - Seite 143 Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Register 1xy303: -Wert des Stromreglers Funktion Beschreibung Lesen Wert der aktuellen der P-Verstärkung des Stromreglers Schreiben Definition eines neuen Wertes für die P-Verstärkung des Stromreglers Wertebereich 0 .. 32.767 Wert nach Reset spezifisch je nach Endstufe Die P-Verstärkung des Stromreglers berechnet sich nach der Betragsoptimierung...
- Seite 144 : siehe Beschreibung für Register 1xy303. Das Register 1xy304 muss dann mit dem Ergebniswert aus folgender Formel parametriert werden. Registerinhalt 1xy304 = K x 4.096 Der angegebene Wert ist ein Vorschlagswert und muss je nach den Erfordernissen der Applikation angepasst werden. Jetter AG...
- Seite 145 Definition eines neuen Wertes für die Motor- Spannungskonstante Wertebereich 0 .. 32.767 Wert nach Reset Der Wert der Spannungskonstanten K kann vom Typenschild der Jetter-Motoren abgelesen werden. Beispiel: Der Motor „JL3-300-25-3“ hat die Spannungskonstante „25“. Volt ---------------------------------------------------------- - Der K...
-
Seite 146: Auslöseschwelle Uzkmax-Überwachung
Zwischenkreisspannung in V Schreiben Definition eines neuen Wertes für die Auslöseschwelle der UzkMin-Überwachung Wertebereich 0 .. 640 Wert nach Reset 250 V In diesem Register wird der Grenzwert bestimmt, an dem die Überwachungsfunktion für die minimale Zwischenkreisspannung aktiviert wird. Jetter AG... -
Seite 147: Auslösezeit Für Die Blockierüberwachung
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Auslösezeit für die Register 1xy346: Blockierüberwachung Funktion Beschreibung Lesen aktueller Wert der Auslösezeit für die Blockierüberwachung in ms Schreiben Definition eines neuen Wertes für die Auslösezeit der Blockierüberwachung Wertebereich 0 .. 32.767 Wert nach Reset 5.000 ms... -
Seite 148: Verzögerungszeit Nach Dem Schließen Der Motorbremse
Schließen der Bremse vergeht (vom Zeitpunkt der Befehlsausgabe). Nach Ablauf der eingestellten Verzögerungszeit ist die Bremse im Status „geschlossen“. Verzögerungszeit Register 1xy347 0 ms (Reset) Reglerfreigabe Moment Bremse Kraft (Bremse) 100 ms (Reset) Verzögerungszeit Register 1xy348 Abb. 41: Verzögerungszeiten Motorbremse öffnen/schließen Jetter AG... -
Seite 149: Skalierung Für Die Geschwindigkeitsvorsteuerung
Modul JX6-CON-Move(-BP) 6.6 Endstufen-Register JetMove 2xx Register 1xy349: Schnellhalt-Rampenzeit Funktion Beschreibung Lesen aktueller Wert der Rampenzeit zum Schnellhalt Schreiben Definition eines neuen Wertes für die Rampenzeit zum Schnellhalt Wertebereich 0 .. 32.767 Wert nach Reset 100 ms In diesem Register kann die Rampenzeit eingestellt werden, die bei einem Schnellhalt aktiviert wird. -
Seite 150: Steuerwort
Bit 0 .. Bit 15, unsigned integer Wert nach Reset Mit Hilfe dieses Registers können Steuerinformationen/Funktionen ausgewählt und gestartet werden. Jedes Bit des Registers steht für eine bestimmte Funktion. Bedeutung der Steuerbits: Bit-Nr. Zustand Bedeutung Bremse schließen Bremse öffnen (nur im manuellen Modus möglich) Jetter AG... -
Seite 151: Endstufen-Register Jetmove 6Xx
Zusammenwirken beider Module zu gewährleisten, ist eine Kommunikation bzw. ein Datenaustausch zwischen beiden Modulen nötig. Der Register, die auf der Seite des Moduls JX6-CON-Move(-BP) genutzt werden, sind in diesem Kapitel beschrieben. Die Kurzübersicht über alle Register befindet sich im Anhang. -
Seite 152: Register Mit Statusinformationen
JX6-CON-Move(-BP) generell nicht beschreibbar. Sie enthalten Informationen, die vom Modul JetMove 6xx generiert werden und im Modul JX6-CON-Move(-BP) zur weiteren Verarbeitung - im wesentlichen zu Diagnosezwecken - zur Verfügung stehen. Der Anwender erhält über diese Register die wichtigsten Zustandswerte der Endstufe und kann daraus z. B. Rückschlüsse über die Auslastung der Endstufe ziehen. -
Seite 153: Bedeutung Der Einzelnen Bits
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Register 1xy375: Statuswort Funktion Beschreibung Lesen aktueller Zustand des Statuswortes Schreiben nicht zulässig Wertebereich bitkodiert: 24-Bit unsigned (siehe Tabelle) Einheit DRIVE ASCII Wert nach Reset Bedeutung der einzelnen Bits: Bedeutung 1 = Parameter-Übernahme Endstufe ist gerade in der Parameter-Übernahme-Phase. - Seite 154 Fehler, die in der Tabellenspalte “Reset“ durch SW gekennzeichnet sind, werden ohne Hardware-Reset zurückgesetzt. Fehler, die durch HW gekennzeichnet sind, werden mit Hardware-Reset zurückgesetzt. Dies führt zum Kommunikationsverlust zwischen Endstufe und JX6-CON-Move(-BP). Nach einem Hardware-Reset muss die Kommunikation zwischen JX6-CON-Move(-BP) und JetMove 6xx-Verstärker neu aufgebaut werden. Jetter AG...
-
Seite 155: Einstellung Der Level-Art
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Wichtig! Die Spalte „Level“ informiert über die Fehlerbehandlung in der Endstufe: Level 2: Ein Fehler führt zu Not-Aus. Der Motor wird durch Drehzahlregelung und mit einer Schnellhaltrampe Vorsicht angehalten (Register 1xy349). Wenn der Motor die Drehzahl Null erreicht hat (auf 5 s begrenzt), wird die Endstufe abgeschaltet. - Seite 156 (Funktionsgruppe: “Basiseinstellungen“ ASCII Querverweis: ERRCODE * Bit 01 1 = Schleppfehler Achse kann der Soll-Vorgabe nicht folgen Kein Schleppfehler Set: Berechnete Soll-Geschwindigkeit übersteigt die vorgegebene max. Geschwindigkeit über den ASCII- Parameter “VLIM“. ASCII Querverweis: ERRCODE * Bit 02 Jetter AG...
- Seite 157 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Anzei- Reset Level Bedeutung 1 = Feedback Rückführfehler 3, 4 Rückführung ok Set: Kein Feedback, keine Kommunikation ASCII Querverweis: ERRCODE * Bit 03 1 = Unterspannungsschutz Zwischenkreisspannung zu niedrig 2, 4 Zwischenkreisspannung in Ordnung...
- Seite 158 Bremse ist angeschlossen). ASCII Querverweis: ERRCODE * Bit 10 RESERVIERT 1 = Umgebungstemperatur Umgebungstemperatur zu hoch 2, 4 Umgebungstemperatur ok Set: Umgebungstempertur (ASCII- Parameter TEMPE) überschreitet den max. zulässigen Schwellwert des ASCII-Parameters MAXTEMPE ASCII Querverweis: ERRCODE * Bit 12 Jetter AG...
- Seite 159 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Anzei- Reset Level Bedeutung 1 = Leistungsendstufe Fehler in der Leistungsendstufe 2, 4 Leistungsendstufe ok Set: Kann verursacht werden durch: – Erdschluss des Motors – Kurzschluss der Motorphasen – Kurzschluss der Balastschaltung ASCII Querverweis:...
- Seite 160 Netzspannung ok Set: 1 Netzphase fehlt ASCII Querverweis: ERRCODE * Bit 18 RESERVIERT RESERVIERT 1 = Erdschluss Erdschluss 2, 4 Erdschluss ok Set: Erdschlussüberwachung der 40 / 70 A Geräte spricht an. ASCII Querverweis: ERRCODE * Bit 21 RESERVIERT Jetter AG...
- Seite 161 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Anzei- Reset Level Bedeutung 1 = Warnung generiert Fehlermeldung Fehler aufgrund einer Warnung 2, 4 Kein Fehler aufgrund einer Warnung Set: Warnung hat Fehlermeldung generiert (abhängig von gesetztem ASCII-Parameter). Abhängig vom ASCII-Parameter WMASK wird eine Fehlermeldung aufgrund einer Warnung generiert.
- Seite 162 Fehler, die in der Tabellenspalte “Reset“ durch SW gekennzeichnet sind, werden ohne Hardware-Reset zurückgesetzt. Fehler, die durch HW gekennzeichnet sind, werden mit Hardware-Reset zurückgesetzt. Dies führt zum Kommunikationsverlust zwischen Endstufe und JX6-CON-Move(-BP). Nach einem Hardware-Reset muss die SB-Kommunikation neu aufgebaut werden. Jetter AG...
- Seite 163 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Wichtig! Die Spalte „Level“ informiert über die Fehlerbehandlung in der Endstufe: Level 2: Ein Fehler führt zu Not-Aus. Der Motor wird durch Drehzahlregelung und mit einer Schnellhaltrampe Vorsicht angehalten (Register 1xy349). Wenn der Motor die Drehzahl Null erreicht hat (auf 5 s begrenzt), wird die Endstufe abgeschaltet.
- Seite 164 Option die Endstufe freigegeben war. ASCII Querverweis: ERRCODE * Bit 26 1 = Externe Trajektorie Sollwertsprung-Fehler Trajektorie ok Set: Sollwertsprung bei der Vorgabe der externen Positions-Trajektorie überschreitet den max. zulässigen Wert. ASCII Querverweis: ERRCODE * Bit 27 RESERVIERT RESERVIERT RESERVIERT Jetter AG...
- Seite 165 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Anzei- Reset Level Bedeutung 1 = Systemfehler Interner Fehler System ist ok Set: Dieser Fehler wird beim Einschalten der Endstufe generiert, wenn die Systemüberprüfung während der Initialisierungsphase nicht erfolgreich abgeschlossen werden konnte. Es sind folgende Ursachen möglich: –...
- Seite 166 Die Störung führt zu Not-Aus. Der Motor wird durch Drehzahlre- gelung und mit einer Schnellhaltrampe angehalten (Register 1xy349). Die Endstufe wird NICHT deaktiviert. Der Betriebsbereit-Relais- kontakt wird NICHT deaktiviert. Der weitere Betrieb ist nur möglich, wenn die Störung beseitigt oder die entsprechende Warnung zurückgesetzt wird. Jetter AG...
- Seite 167 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Bedeutung der einzelnen Bits: Anzei- Level Bedeutung 1 = I t-Schwelle t-Schwelle wird überschritten Aktueller I t-Wert zulässig Set: T ist größer als der eingestellte Schwellwert des ASCII-Parameters I2TLIM, DRIVE-Software “I2T Meldung“ (Funktionsgruppe: “Stromregler“).
- Seite 168 – Eine Positionierung mit einer Zielposition größer als der Wert SWE1 wird gestartet. Um die Software-Endschalter benutzen zu können, muss zuvor die Software-Endschal- terfunktion für die Positionsregister SWE1 und SWE2 gewählt werden. ASCII Querverweis: DRVSTAT * Bit 05 Jetter AG...
- Seite 169 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Anzei- Level Bedeutung 1 = Software-Endschalter 2 Betätigt Nicht betätigt Set: Die aktuelle Position ist höher als die Position des ASCII-Parameters SWE2, DRIVE-Software “Position 2“ (Funktionsgruppe: “Positionierdaten“). Reset: – Die aktuelle Position unterschreitet (niedrigere Position) den Wert SWE2 und die Geschwindigkeit ist negativ.
- Seite 170 Button Kaltstart werden die Motorstandardpa- rameter im EEPROM der Endstufe gespei- chert. Wenn im EEPROM des Encoders noch keine Daten mit dem ASCII-Befehl HSAVE gespeichert wurden, muss HSAVE statt SAVE benutzt werden. Nur für Absolutwertgeber-Systeme ASCII Querverweis: DRVSTAT * Bit 11 RESERVIERT Jetter AG...
-
Seite 171: Firmware-Version Der Sb-Schnittstelle
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Anzei- Level Bedeutung 1 = SinCos Feedback Kommutierung noch nicht vollzogen Kommutierung vollzogen Set: Beim Starten der Endstufe. Reset: Nachdem Endstufe freigeschalten und Kommutierung bestimmt wurde. Nur wenn Feedback-Typ = 7. RESERVIERT RESERVIERT Firmware-Version der... -
Seite 172: Schleppfehler
PRBASE = ASCII-Parameter PRBASE Reg 1xy017 × ------------------------------- - Reg 1xy019 Schleppfehler (PE) PRBASE ASCII Skalierung: siehe oben Wert nach Reset Der Wert des Registers gibt an, um wie viele Inkremente die Achse von der Position der virtuellen Achse abweicht. Jetter AG... - Seite 173 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Register 1xy020: Schleppfehlergrenze Funktion Beschreibung Lesen aktuelle Grenze Schreiben neue Schleppfehlergrenze Gültig sofort Notwendiger Endstufen- Endstufe ist nicht freigegeben Status Wertebereich 0 ... +8.388.607 Einheit Inkremente DRIVE max. Schleppfehler (Funktionsgruppe: Istwerte) Skalierung: PRBASE = ASCII-Parameter PRBASE Reg 1xy017 ×...
-
Seite 174: Register Für Den Lageregler
Skalierung: Reg. 1xy010 = GP * 1.000 Wert nach Reset zuletzt im EEPROM des Verstärkers gespeicherter KV / GP Wert * 1.000 Dieses Register bestimmt die proportionale Verstärkung des Lagereglers. Normierung: Geschwindigkeit in mm/s bei einer Positionsabweichung von 1 mm. Jetter AG... -
Seite 175: Register Für Den Digitalen Drehzahlregler
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx 6.7.4 Register für den Digitalen Drehzahlregler In diesem Kapitel sind alle Register beschrieben, die im Zusammenhang mit dem digitalen Drehzahlregler stehen. Der Aufbau und die Funktionsweise eines Drehzahlreglers wurde bereits in der Basisbeschreibung im Kapitel 5.3.2: "Servoverstärker", Seite 62, erklärt. -
Seite 176: Geschwindigkeit P-Verstärkung (Kp)
Vergrößern Sie den Wert bis zur Motor-Schwinggrenze und verkleinern Sie ihn dann bis zum sicheren Aussetzen der Schwingung. Für diesen Parameter typische Einstellwerte liegen zwischen 10.000 und 20.000. Normierung: Bei P-Verstärkung = 1.000 und einer Regelabweichung von (n ) = 3.000 U/ soll min wird der Gerätespitzenstrom geliefert. Jetter AG... - Seite 177 Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Register 1xy026: Drehzahl Tn Funktion Beschreibung Lesen aktueller Wert Tn des Drehzahlregelkreises Schreiben neuer Wert Tn Gültig zurückgesetztes Parameter-Übernahme-Bit (Reg. 1xy375) Notwendiger Endstufen- kein bestimmter Status erforderlich Status Wertebereich (Reg. 1xy024 “Speed P-Verstärkung“ / 62.500) ...
-
Seite 178: Strom-Sollwertbegrenzung
Ipeak (Funktionsgruppe: Stromregler) Skalierung: Reg. 1xy027 = Ipeak * 1.000 ASCII IPEAK Skalierung: Reg. 1xy027 = IPEAK * 1.000 Wert nach Reset zuletzt im EEPROM des Verstärkers gespeicherter IPEAK Wert * 1.000 Dieses Register wird zur Drehmomentbegrenzung benutzt. Jetter AG... -
Seite 179: Konfigurationsregister Für Achsen
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx 6.7.5 Konfigurationsregister für Achsen Register 1xy016: Phasen-Offset Funktion Beschreibung Lesen aktueller Wert des Phasenoffsets des Motors Schreiben neuer Phasenoffset Gültig zurückgesetztes Parameter-Übernahme-Bit (Reg. 1xy375) Notwendiger Endstufen- Endstufe ist nicht freigegeben Status Wertebereich 0 ... 360... -
Seite 180: Maximaldrehzahl Der Jetmove-Motor-Kombination
EEPROM des Verstärkers gespeicherte Enddrehzahl / VLIM Wert In diesem Register ist die Maximaldrehzahl, die von der JetMove-Motor-Kombination erreicht werden kann, einzutragen. Hinweis! Das Produkt aus den Registern 1xy017 und 1xy018 darf den Wert 61.346.000 nicht überschreiten. Jetter AG... -
Seite 181: Register Mit Parameterinformationen
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx 6.7.6 Register mit Parameterinformationen Register 1xy303: Strom P-Verstärkung Funktion Beschreibung Lesen aktueller Wert der proportionalen Verstärkung des Stromregelkreises Schreiben neue P-Verstärkung Gültig zurückgesetztes Parameter-Übernahme-Bit (Reg. 1xy375) Notwendiger Endstufen- kein bestimmter Status erforderlich Status Wertebereich 10 ... - Seite 182 Tn (Funktionsgruppe: Stromregler) Skalierung: Reg 1xy304 = Tn * 1.000 ASCII Skalierung: Reg 1xy304 = KTN * 1.000 Wert nach Reset zuletzt im EEPROM des Verstärkers gespeicherter Tn / KTN Wert * 1.000 Legt die Nachstellzeit (Integral-Zeitkonstante) des Stromreglers fest. Jetter AG...
-
Seite 183: Abb. 43: Schnellhaltrampe
Modul JX6-CON-Move(-BP) 6.7 Endstufen-Register JetMove 6xx Register 1xy349: Schnellhalt-Rampenzeit Funktion Beschreibung Lesen aktueller Wert der Schnellhart-Rampe Schreiben neue Schnellhalt-Rampe Gültig sofort Notwendiger Endstufen- kein bestimmter Status erforderlich Status Wertebereich 0 ... 32.767 Einheit ms -> VLIM DRIVE Notrampe (Funktionsgruppe: Drehzahlregler) - Seite 184 6 Registerbeschreibung JetWeb Jetter AG...
-
Seite 185: Positionierfunktionen
Modul JX6-CON-Move(-BP) 7.1 Prinzipielle Positionierarten Positionierfunktionen Diese Beschreibung umfasst neben den beiden generellen Positionierungsarten einige spezielle Positioniermodi, die mit einem Modul JX6-CON-Move(-BP) realisiert werden können. Prinzipielle Positionierarten 7.1.1 Absolutpositionierung In diesem Positioniermodus werden, ausgehend von einem definierten Bezugspunkt, alle Positionen absolut berechnet und angefahren. Nachfolgende Positionierungen werden immer wieder auf der Grundlage des Bezugspunktes berechnet und ausgeführt. -
Seite 186: Relativpositionierung
Der Referenzpunkt hat jedoch eine Bedeutung beim ersten relativen Positioniervorgang. Das Referenzieren der Achse ist eine Grundvoraussetzung für den Betrieb von Modulen JX6-CON-Move(-BP). Wird nach der Referenzfahrt sofort der Modus "Relative Positionierung" gewählt, dann erfolgt die erste relative Positionierung vom Absolutwert 0 aus. - Seite 187 Modul JX6-CON-Move(-BP) 7.1 Prinzipielle Positionierarten Wiederaufnahme Wurde eine Relativpositionierung durch einen HALTACHSE-Befehl der Relativ- unterbrochen, kann der Prozess wieder aufgenommen werden. Dazu wird positionierung das Kommando 19 gegeben, intern wird aus Register 1xy068 der Wert der letzten absoluten Sollposition ausgelesen und die Achse fährt auf diesen absoluten Positionswert.
-
Seite 188: Gegenüberstellung Positionierungsarten
Startet die relative Positionierung der Achse, ausgehend von der letzten Sollposition, auf die relative Position 40.000 inc. Das bedeutet in diesem Fall, fahre von der letzten Sollposition aus (= Position 20.010 inc) 40.000 Inkremente weiter. Die Achse steht danach auf der absoluten Position 60.010 inc. Jetter AG... -
Seite 189: Abb. 44: Ablauf Von Absolutpositionierungen
Modul JX6-CON-Move(-BP) 7.1 Prinzipielle Positionierarten Die folgenden Darstellungen zeigen die Verfahrwege und Positionen der Achse entsprechend den Programmierschritten, die auf der vorigen Seite aufgelistet sind. Zeit t 2. Positionierung mit Sollwert = 40.000 1. Positionierung mit Sollwert = 20.000 Position (in inc) 40.010... -
Seite 190: Registerübersicht: Absolut- Und Relativpositionierung
Die Register 1xy017 bis 1xy021 dienen der grundlegenden Parametrierung der Achse und sind für Positioniervorgänge nur mittelbar relevant. Eine detaillierte Beschreibung der allgemeinen Register befindet sich in den Kapiteln 6.2 bis 6.7. Register: Absolut- und Relativpositionierungen Letzte absolute Sollposition im Modus Relativpositionierung Jetter AG... -
Seite 191: Registerbeschreibung: Absolut- Und Relativpositionierung
Modul JX6-CON-Move(-BP) 7.1 Prinzipielle Positionierarten 7.1.5 Registerbeschreibung: Absolut- und Relativpositionierung Register 1xy002: Sollposition Funktion Beschreibung Lesen Wert der aktuellen Sollposition der Achse Schreiben Definition einer neuen Sollposition für die Achse und gleichzeitiger Start der Positionierung auf die neue Position Wertebereich -8.388.608 .. -
Seite 192: Letzte Absolute Sollposition Im Modus Relativpositionierung
HALTACHSE-Befehl unterbrochen wurde. Dazu wird das Kommando 19 erteilt, intern wird aus dem Register 1xy068 der Wert der letzten absoluten Sollposition ausgelesen und dieser absolute Positionswert wird angefahren. Anschließend kann mit normaler Relativpositionierung weitergefahren werden. Jetter AG... -
Seite 193: Kommandoübersicht: Absolut- Und Relativpositionierung
Modul JX6-CON-Move(-BP) 7.1 Prinzipielle Positionierarten 7.1.6 Kommandoübersicht: Absolut- und Relativpositionierung Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für eine Absolut- oder Relativpositionierung benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der Achse geschrieben. Ein Kommando ist aktiv, bis ein gegenteiliges Kommando gegeben wird. -
Seite 194: Relativpositionierung Mit Starteingang
Achse ausgelöst. Voraussetzung ist, dass sich die Achse im Status HALTACHSE befindet. Es gilt folgende, fest eingestellte Zuordnung bezüglich der Eingänge und der Achsen: Eingang des Moduls Verwendung JX6-CON-Move(-BP) x10* Starteingang Achse 1 x11* Starteingang Achse 2 Anmerkung zu x10* und x11*: „x“ist dabei (Steckplatznummer) x 100 Zur Nummerierung der Eingänge siehe auch Kapitel 4.3.4: "Digitale Eingänge", Seite... - Seite 195 Modul JX6-CON-Move(-BP) 7.2 Relativpositionierung mit Starteingang Wiederaufnahme Wurde während der Relativpositionierung mit Starteingang der Prozess der Relativ- durch einen HALTACHSE-Befehl abgebrochen, so kann auch dieser positionierung Vorgang wieder aufgenommen werden. Dazu wird Kommando 19 gegeben und intern wird aus Register 1xy068 der Wert der letzten absoluten Sollposition ausgelesen.
-
Seite 196: Registerübersicht: Relativpositionierung Mit Starteingang
Parametrierung der Achse und sind für Positioniervorgänge nur mittelbar relevant. Eine detaillierte Beschreibung der allgemeinen Register befindet sich in den Kapiteln 6.2 bis 6.7. 067 - Register: Relativpositionierung mit Starteingang Relativposition beim Fahren mit Starteingang Letzte absolute Sollposition im Modus Relativpositionierung Jetter AG... -
Seite 197: Registerbeschreibung: Relativpositionierung Mit Starteingang
Modul JX6-CON-Move(-BP) 7.2 Relativpositionierung mit Starteingang 7.2.3 Registerbeschreibung: Relativpositionierung mit Starteingang Relativposition beim Fahren mit Register 1xy067: Starteingang Funktion Beschreibung Lesen Wert der aktuellen relativen Sollposition der Achse Schreiben Definition einer neuen relativen Sollposition für die Achse Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Der Inhalt dieses Registers gibt die neue gewünschte Sollposition in einer... - Seite 198 Kommando 19 erteilt, intern wird der Inhalt des Registers 1xy068 ausgelesen, danach fährt die Achse auf den absoluten Positionswert, der sich aus der Summe der Inhalte der Register 1xy067 und 1xy068 ergibt. Anschließend kann "normal" (d.h. nur unter Benutzung des Registers 1xy067) weitergefahren werden. Jetter AG...
-
Seite 199: Kommandoübersicht: Relativpositionierung Mit Starteingang
Modul JX6-CON-Move(-BP) 7.2 Relativpositionierung mit Starteingang 7.2.4 Kommandoübersicht: Relativpositionierung mit Starteingang Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für eine Relativpositionierung mit Starteingang benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der Achse geschrieben. Ein Kommando ist aktiv, bis ein gegenteiliges Kommando gegeben wird. -
Seite 200: Endlospositionierung
7 Positionierfunktionen JetWeb Endlospositionierung 7.3.1 Überblick Das Modul JX6-CON-Move(-BP) ist dazu geeignet, eine Achse im Modus "Endlospositionierung" zu betreiben. Dabei handelt es sich um eine fortlaufende Positionierung mit folgenden Merkmalen: • der Start erfolgt unter Berücksichtigung der eingestellten Startrampe, •... - Seite 201 Modul JX6-CON-Move(-BP) 7.3 Endlospositionierung Eine Endlospositionierung ist sowohl in positive, als auch in negative Richtung möglich. Die positive Richtung wird mit Kommando 56 ausgewählt, die negative Richtung mit Kommando 57. Ein Wechsel der Positionierrichtung innerhalb des Gesamtablaufs ist nicht möglich.
-
Seite 202: Abb. 46: Ablauf Von Endlospositionierungen In Positive Richtung
Sobald die Sollposition und damit nachfolgend die Istposition den Grenzwert (hier 200.000 inc) erreicht haben, werden beide Positionen immer um den parametrierten Grenzwert (hier 200.000 inc und damit auf 0) zurückgesetzt. Somit beginnt der nächste Positionierzyklus wieder bei 0. Die dargestellten 3 Positionierzyklen verlaufen hintereinander ohne Stopp. Jetter AG... -
Seite 203: Abb. 47: Ablauf Von Endlospositionierungen In Negative Richtung
Modul JX6-CON-Move(-BP) 7.3 Endlospositionierung Für das Endlos-Positionieren in negative Richtung ergibt sich folgendes Bild: Die zuvor festgelegten Annahmen sollen unverändert gelten. Die Endlospositionierung wird mit Kommando 57 (negative Richtung) gestartet. Die Positionierzyklen 1 bis 3 verlaufen alle mit der zuvor im Register 1xy003 eingestellten Geschwindigkeit und die im Register 1xy005 parametrierte Startrampe wird ebenfalls realisiert. -
Seite 204: Registerübersicht: Endlospositionierung
Bezugswert zur Sollgeschwindigkeit der Achse Hinweis! Die Register 1xy017 bis 1xy021 dienen der grundlegenden Parametrierung der Achse und sind für Positioniervorgänge nur mittelbar relevant. Eine detaillierte Beschreibung der allgemeinen Register befindet sich in den Kapiteln 6.2 bis 6.7. Register: Endlospositionierung Absolute Maximalposition Jetter AG... -
Seite 205: Registerbeschreibung: Endlospositionierung
Modul JX6-CON-Move(-BP) 7.3 Endlospositionierung 7.3.3 Registerbeschreibung: Endlospositionierung Register 1xy085: Absolute Maximalposition Funktion Beschreibung Lesen Wert der absoluten Maximalposition Schreiben Übergabe einer neuen Maximalposition Wertebereich 0 .. +7.490.000 Wert nach Reset 7.490.000 In der Spezialfunktion "Endlospositionierung" wird dieses Register als Grenzwert zum definierten Rücksetzen von Ist- und Sollposition benutzt. -
Seite 206: Kommandoübersicht: Endlospositionierung
Endlospositionierung benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der Achse geschrieben. Ein Kommando ist aktiv, bis ein gegenteiliges Kommando gegeben wird. Kommandos: Kommando-Nr. Endlospositionierung HALTACHSE mit Stopprampe Referenz setzen HALTACHSE mit Lageregelung Endlospositionierung in positive Richtung Endlospositionierung in negative Richtung Jetter AG... -
Seite 207: Position Mit Eingangssignal Sichern
Die Position der Achse wird innerhalb einer Zeit von 500 µs in einem Register gespeichert. Die Funktion wird nicht über Kommandos gesteuert, sondern nur über Hardwaresignale und durch Registerparametrierungen. Hinweis! Es ist zu beachten, dass diese Sonderfunktion nur für die Achsen 1 und 2 eines Moduls JX6-CON-Move(-BP) benutzt werden kann. Jetter AG... -
Seite 208: Voraussetzungen
7 Positionierfunktionen JetWeb Voraussetzungen: • die Eingänge 12 und 13 des Moduls JX6-CON-Move(-BP) müssen für diese Funktion reserviert werden (siehe folgende Abbildung), 24 V ERR2 Benutzte Eingänge E12, E13 JX6- CON-Move Abb. 48: Benutzte Eingänge für Capture-Modus • Die beiden Achsregister 1x1086 und 1x2086 werden benutzt, um über eine Codierung die Reaktion auf die Signale an den Eingängen 12 und 13 zu... -
Seite 209: Funktionsbeschreibung
Modul JX6-CON-Move(-BP) 7.4 Position mit Eingangssignal sichern Funktionsbeschreibung Bei einem positiven 24 V - Signal am Eingang 12 werden die Positionen der Achsen 1 und 2 in die Register 1x1087 (Position der Achse 1) und 1x2087 (Position der Achse 2) gespeichert. Das Speichern erfolgt in Abhängigkeit von der Codierung, die zuvor im Register 1x1086 definiert wurde. -
Seite 210: Abb. 49: Funktionsdiagramm Position Mit Eingangssignal Sichern
Istposition der Achse 1 Bit 0 Bit 1 im Register 1x1087 Eingang 12 speichern 24 V - Signal Eingang 13 Istposition der Achse 2 im Register 1x2087 Bit 0 Bit 1 speichern Register 1x2086 Abb. 49: Funktionsdiagramm Position mit Eingangssignal sichern Jetter AG... - Seite 211 Modul JX6-CON-Move(-BP) 7.4 Position mit Eingangssignal sichern Ablauf Folgende Annahmen sollen gelten: • auf einem Modul JX6-CON-Move(-BP) sind 2 Achsen (Achse 21 und Achse 22) aktiv, • die momentanen Istpositionen der Achsen 21 und 22 sind 40.000 inc bzw. 120.000 inc, •...
-
Seite 212: Registerübersicht:position Mit Eingangssignal Sichern
Positioniervorgänge nur mittelbar relevant. Eine detaillierte Beschreibung der allgemeinen Register befindet sich in den Kapiteln 6.2 bis 6.7. 086 - Register: Position mit Eingangssignal sichern Codierung, welche Position abgespeichert werden soll (nach Signal von Eingang 12/13) Momentane Istposition der Achse Jetter AG... -
Seite 213: Registerbeschreibung: Position Mit Eingangssignal Sichern
Modul JX6-CON-Move(-BP) 7.4 Position mit Eingangssignal sichern 7.4.3 Registerbeschreibung: Position mit Eingangssignal sichern Codierung, welche Position Register 1xy086 abgespeichert werden soll (nach Signal von Eingang 12/13) Funktion Beschreibung Lesen aktuelle Codierung Schreiben Übergabe neuer Werte für die Codierung Wertebereich bitcodiert, Bit 0 .. Bit 1 Wert nach Reset Dieses Register wird in der Spezialfunktion "Position mit Eingangssignal sichern"... -
Seite 214: Momentane Istposition Der Achse
Zeit von 500 µs realisiert, • und erfolgt entsprechend der Codierung, die zuvor im Register 1xy086 definiert wurde. Das Register kann für beide Achsen eines Moduls JX6-CON-Move(-BP) benutzt werden: Istposition der Achse 1 = Register 1x1087 Istposition der Achse 2... -
Seite 215: Bahnsteuerungen
Modul JX6-CON-Move(-BP) Bahnsteuerungen Überblick Bewegungsabläufe von Achsen können auf unterschiedliche Weise realisiert werden. Im „normalen“ und einfacheren Betrieb kommt zumeist eine PTP-Steuerung (PTP = point to point) zum Einsatz. Das bedeutet, dass eine Achse von einer definierten Startposition in eine definierte Endposition verfahren wird. Es können mehrere Achsen gleichzeitig bewegt werden, aber dennoch wird jede einzelne Achse separat verfahren, d.h. - Seite 216 8 Bahnsteuerungen JetWeb Bahnsteuerungen mit dem Modul JX6-CON-Move(-BP) Mit dem Modul JX6-CON-Move(-BP) lassen sich in Verbindung mit dem Modul JetMove 2xx verschiedene Interpolationsarten realisieren: • Linearinterpolation • Kreisinterpolation • Kombinierte Kreis- und Linearinterpolation • Spline-Interpolation • Fortlaufende Interpolation. Die folgenden Kapitel enthalten nähere Informationen dazu.
-
Seite 217: Linearinterpolation
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Linearinterpolation 8.1.1 Überblick Prinzipiell wird bei einer Linearinterpolation die Bahnkurve durch eine oder mehrere Geraden approximiert. Das bedeutet, die Achsen bewegen sich auf einer Geraden, also linear, vom Startpunkt zum Zielpunkt. Linearinterpolation Linearinterpolation (Geraden) (Polygonzug) Abb. 50: Prinzip der Linearinterpolation Theoretisch ist möglich, beliebig viele Achsen in einer Linearinterpolation zu... -
Seite 218: Abb. 51: Zeitdiagramme Zur Linearinterpolation
Abbremsen s in m der Achse bis zum Stillstand benötigt wird; auch als Stopprampe bezeichnet. Nach Ablauf dieser Zeiten hat die Achse ihre Zielposition erreicht. t in s Abb. 51: Zeitdiagramme zur Linearinterpolation Jetter AG... -
Seite 219: Linearinterpolationen Mit Dem Modul Jx6-Con-Move(-Bp)
Für die internen Berechnungen zur Ausführung der Interpolation wird in der Software innerhalb des Moduls JX6-CON-Move(-BP) ein virtuelles Abbild aller Achsen geschaffen. Das Ergebnis der Berechnungen spiegelt sich in der Masterachse wider. Über die Masterachse werden auch die Parameter für die Interpolation definiert. -
Seite 220: Allgemeine Voraussetzungen
8 Bahnsteuerungen JetWeb Das Reglermodul JX6-CON-Move(-BP), auf welchem die Masterachse angesprochen werden soll, hat die Bezeichnung Mastermodul. Welches Modul dafür ausgewählt wird, liegt im Ermessen des Anwenders und hängt sehr stark von den zu realisierenden Interpolationsaufgaben ab. Die Anforderungen sollten deshalb schon bei der Hardwareprojektierung bekannt sein und beachtet werden. -
Seite 221: Konfigurationen
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation 8.1.3 Konfigurationen Allgemeine Festlegungen: Die Achsen werden immer über ein Submodul JX6-SB, welches auf einem Reglermodul JX6-CON-Move(-BP) platziert ist, definiert. Gehäuse Steckplatz 1 JX6-CON- Move (-BP) Submodul 3 = leer Submodul 2 = leer Submodul 1... - Seite 222 Alle Slaves, die sich nicht auf dem Mastermodul befinden, heißen externe Slaves. Hinweis! Für die Ausführung von Interpolationen ist beim Hardwareaufbau zu beachten: Sollen Achsen benutzt werden, die sich auf verschiedenen Reglermodulen und damit auf verschiedenen Steckplätzen befinden, so sind nur Module des Typs JX6-CON-Move-BP zugelassen. Jetter AG...
-
Seite 223: Mögliche Achskonfigurationen
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Mögliche Achskonfigurationen: Es gibt 5 verschiedene Varianten, um Achsen in einer Linearinterpolation zu kombinieren: Nur die physikalischen Achsen 1 und 2 eines Mastermoduls sind beteiligt. Die physikalischen Achsen 1 und 2 eines Mastermoduls und eine bis 4 externe Achsen sind beteiligt. -
Seite 224: Abb. 54: Aufbau Zur Linearinterpolation Variante 1
Master-Modul => Softwareachse 4 = Masterachse Abb. 54: Aufbau zur Linearinterpolation Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move oder ein Modul JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21 und 22 konfiguriert werden. -
Seite 225: Abb. 55: Aufbau Zur Linearinterpolation Variante 2
Master-Modul => Softwareachse 4 = Masterachse Abb. 55: Aufbau zur Linearinterpolation Variante 2 Auf den Steckplätzen 2, 3 und 4 sind Reglermodule JX6-CON-Move-BP gesteckt, auf denen die Submodule 1 jeweils als Module JX6-SB ausgeführt sind. Damit sind insgesamt 6 Achsen definiert. Die logischen Achsnummern stehen in obiger Abbildung unter der Submodulbezeichnung 1 (JX6-SB). - Seite 226 8 Bahnsteuerungen JetWeb Bei der Nutzung eines 8-Steckplatz-Gehäuses können andere Steckplätze für die Module JX6-CON-Move-BP gewählt werden. Es muss dann aber die hardwaremäßige Bustrennung zwischen den Erweiterungsmodulsteckplätzen 4 und 5 beachtet werden. Das bedeutet, alle für die Interpolation genutzten Module müssen sich entweder auf den Steckplätzen 2 bis 4 oder 5 bis 8 befinden.
-
Seite 227: Abb. 56: Aufbau Zur Linearinterpolation Variante 3
Master-Modul => Softwareachse 4 = Masterachse Abb. 56: Aufbau zur Linearinterpolation Variante 3 Die Steckplätze 5 bis 7 beinhalten die Reglermodule JX6-CON-Move-BP, deren Submodule 1 (Module JX6-SB) die an der Bewegungskoordination beteiligten Achsen definieren. Die logischen Achsnummern stehen in obiger Abbildung unter der Submodulbezeichnung 1 (JX6-SB). - Seite 228 JetWeb Bei der Verwendung eines 8-Steckplatz-Gehäuses können auch andere Steckplätze für die Module JX6-CON-Move-BP gewählt werden. Wegen der hardwaremäßigen Bustrennung zwischen Steckplatz 4 und 5 müssen sich die an der Interpolation beteiligten Module entweder auf den Steckplätzen 2 bis 4 oder 5 bis 8 befinden.
-
Seite 229: Abb. 57: Aufbau Zur Linearinterpolation Variante 4
Master-Modul => Softwareachse 4 = Masterachse Abb. 57: Aufbau zur Linearinterpolation Variante 4 Die Steckplätze 5 bis 7 beinhalten die Reglermodule JX6-CON-Move-BP, deren Submodule 1 (Module JX6-SB) die an der Bewegungskoordination beteiligten Achsen definieren. Die logischen Achsnummern stehen in obiger Abbildung unter der Submodulbezeichnung 1 (JX6-SB). - Seite 230 Submoduls 3 der Reglermodule auf den Steckplätzen 5 bis 7 nicht relevant. Es können z. B. zusätzliche Ein-/Ausgangskarten gesteckt werden. Gleiches gilt für das Submodul 2 auf dem Modul JX6-CON-Move-BP auf Steckplatz 5. Dagegen dürfen die Submodulplätze 2 der Reglermodule auf den Steckplätzen 6 und 7 nicht belegt werden.
-
Seite 231: Abb. 58: Aufbau Zur Linearinterpolation Variante
Master-Modul => Softwareachse 4 = Masterachse Abb. 58: Aufbau zur Linearinterpolation Variante 5 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21, 22 und 23 konfiguriert werden. -
Seite 232: Programmier-Hinweise
Achsen auf dem Mastermodul sind an der Interpolation beteiligt und sie sind automatisch zu Slaveachsen deklariert, • es existieren zusätzliche externe Slaves, die als solche deklariert werden müssen. Siehe dazu auch Kapitel 8.1.3: "Konfigurationen", Seite 221ff. Jetter AG... - Seite 233 Mastermodul, • die Softwareachse 4 dieses Moduls ist die Masterachse der Interpolation, • alle 3 Achsen eines Moduls JX6-CON-Move(-BP) sind an der Interpolation beteiligt und sie müssen nicht explizit als Slaves definiert werden, • es gibt keine externen Slaves.
- Seite 234 Auf dem Steckplatz 2 befindet sich das Mastermodul. Die Anzahl der dort definierten Achsen ist irrelevant. Auf den Steckplätzen 3 und 4 sind über die Module JX6-CON-Move-BP die Achsen 31, 32, 41 und 42 definiert, die als externe Slaveachsen an der Linearinterpolation beteiligt sind. Folgende Definitionen sind nötig:...
- Seite 235 Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Geschwindigkeit, Die Parameter für die Bewegung der Resultierenden (Sollgeschwindigkeit, Start- und Startrampe, Stopprampe und Zielfenster) werden in den Registern der Stopprampe, Masterachse (Achse 4 des Mastermoduls) bzw. in den Registern der Zielfenster Datenachse vorgegeben. Register 1x4003 = __...
- Seite 236 Normalerweise wird im Masterregister 1x4040 die errechnete Länge der Softwareachse gespeichert. Der Wert wird intern vom Modul JX6-CON-Move(-BP) berechnet, auf der Basis der bekannten Soll- und Istpositionen der beiden (oder drei) Achsen des Mastermoduls. Grundlagen dafür sind die Verwendung der beiden (oder drei) Achsen, um die Diagonale aufzuspannen, und die vorangegangenen Parametrierungen der Master- und Slaveregister.
- Seite 237 Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Maximalge- Die Maximalgeschwindigkeiten der Slaveachsen müssen an die maximale schwindigkeiten Geschwindigkeit der Datenachse angepasst werden. anpassen Bei den Linearinterpolationen, die auf den Master-Slave-Konfigurationen 1, 2, 4 oder 5 (Kommandos 38, 39, 43 bzw. 94) basieren, entspricht die Datenachse der Achse 1 des Mastermoduls.
-
Seite 238: Beispiele Zur Anpassung Von Maximalgeschwindigkeit Und Geberauflösung
Das Slaveregister 131051 wird mit dem Wert 303 parametriert. GSZSlaveAchse ------------------------------------------------ - × Register1xy052 1.000 GSZDatenAchse --------- - 50 06 ----------------------------- - × Register131052 1.000 --------- - 115 70 Register131052 432 67 Das Slaveregister 131052 wird mit dem Wert 433 parametriert. Jetter AG... - Seite 239 Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Beispiel 2: ohne Getriebe, nur anderer Geber Registerinhalte: 121018 = 3.000 U/min 131018 = 3.000 U/min 121017 1.024 inc/mm 131017 2.500 inc/mm Register 131051 muss nicht parametriert werden, da die Maximalgeschwindigkeiten identisch sind. GSZSlaveAchse × ------------------------------------------------ - Register1xy052 1.000...
- Seite 240 Register 1xy000, Bit 13 = 0 ? Wenn das Bit 13 wieder 0 ist, kann man davon ausgehen, dass alle Achsen vom Bus getrennt und definiert angehalten sind. Beispielprogramme zu den einzelnen Varianten befinden sich auf der CD, welche dem Buch beiliegt. Jetter AG...
-
Seite 241: Registerübersicht: Linearinterpolation
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation 8.1.5 Registerübersicht: Linearinterpolation Die Registerübersicht enthält alle für eine Linearinterpolation benutzten Register. Sie können als Register sowohl für die Masterachse als auch für Slaveachsen benötigt werden. Eine ausführliche Beschreibung befindet sich im nachfolgenden Kapitel. Reg. Register: Linearinterpolation... - Seite 242 Länge der Softwareachse Anpassung der Maximalgeschwindigkeiten an die Datenachse Anpassung der Geberauflösungen an die Datenachse Sollposition 3. Achse Mastermodul 4132 Achsnummer externer Slave 1 4133 Achsnummer externer Slave 2 4134 Achsnummer externer Slave 3 4135 Achsnummer externer Slave 4 Jetter AG...
-
Seite 243: Registerbeschreibung: Linearinterpolation
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation 8.1.6 Registerbeschreibung: Linearinterpolation Sollposition 1. Achse Register 1x4030: Mastermodul Funktion Beschreibung Lesen Wert der aktuellen Sollposition für Achse 1 des Mastermoduls Schreiben Übergabe einer neuen Sollposition Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird in einer Linearinterpolation als Masterregister benutzt, um die Sollposition einer Slaveachse abzuspeichern. - Seite 244 Nötig ist dies bei den Master-Slave-Konfigurationen 2, 3 und 4. Die Slaveachse muss zuvor als solche deklariert werden (per Kommando 32 für die jeweils 1. Achse eines Erweiterungsmoduls bzw. mit Kommando 33 für die jeweils 2. Achse des Moduls). Jetter AG...
- Seite 245 Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Register 1x4034: Sollposition externer Slave 3 Funktion Beschreibung Lesen Wert der aktuellen Sollposition für den externen Slave 3 Schreiben Übergabe einer neuen Sollposition für externen Slave 3 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird in einer Linearinterpolation als Masterregister benutzt, um die Sollposition der externen Slaveachse 3 abzuspeichern.
-
Seite 246: Istposition Externer Slave 1 Zur Diagonalenberechnung
Im erstgenannten Fall wird im Register 1x4038 die Istposition der externen Achse parametriert, die bei der Zuweisung der Sollpositionen als erste aller Achsen ihre Sollposition erhält. Das Register muss vor dem Start der Funktion parametriert werden. Die Register 1x4038 und 1x4039 sind im Zusammenhang zu betrachten. Jetter AG... -
Seite 247: Istposition Externer Slave 2 Zur Diagonalenberechnung
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Istposition externer Slave 2 zur Register 1x4039: Diagonalenberechnung Funktion Beschreibung Lesen Wert der aktuellen Istposition von externem Slave 2 Schreiben Übergabe einer neuen Istposition für externen Slave 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird in einer Linearinterpolation als Masterregister benutzt, um die Berechnung der Diagonalen durchzuführen, wenn externe Slaves beteiligt sind. -
Seite 248: Länge Der Softwareachse
Entscheidungs-Flag rückgesetzt, d.h. die Länge der Softwareachse wird ab diesem Zeitpunkt wieder vom Reglermodul berechnet. Wird die Länge der Softwareachse vom Anwender vorgegeben, dann kann die Parametrierung der Register 1x4038 und 1x4039 (Vorgabe der Istpositionen der externen Slaves) entfallen. Jetter AG... -
Seite 249: Register 1Xy051: Maximalgeschwindigkeiten An Die Datenachse
Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Anpassung der Register 1xy051: Maximalgeschwindigkeiten an die Datenachse Funktion Beschreibung Lesen aktueller Wert für die Geschwindigkeitsanpassung Schreiben Übergabe eines neuen Wertes für die Anpassung der Geschwindigkeit Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Die Geschwindigkeitsanpassung muss immer dann durchgeführt werden, wenn die Maximalgeschwindigkeiten der beteiligten Achsen und der Datenachse nicht identisch sind. -
Seite 250: Geberauflösungen An Die Datenachse
Hat nun eine an einer Interpolation beteiligte Slaveachse eine andere Geberauflösung als die Datenachse, so muss das Register 1xy052 dieser Slaveachse parametriert werden. Der Wert berechnet sich nach folgender Formel: GSZSlaveAchse -------------------------------------------- - × Register1xy052 1.000 GSZDatenAchse GSZ = Geberauflösung in Register 1xy017 Jetter AG... - Seite 251 Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Sollposition 3. Achse Register 1x4097: Mastermodul Funktion Beschreibung Lesen Wert der aktuellen Sollposition für Achse 3 des Mastermoduls Schreiben Übergabe einer neuen Sollposition Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird in einer Linearinterpolation als Masterregister benutzt, um die Sollposition einer Slaveachse abzuspeichern.
- Seite 252 Wert nach Reset Falls eine Linearinterpolation mit externen Slaveachsen ausgeführt werden soll, muss dem Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der dritten beteiligten externen Slaveachse eingetragen werden. Jetter AG...
- Seite 253 Modul JX6-CON-Move(-BP) 8.1 Linearinterpolation Register 1x4135: Achsnummer externer Slave 4 Funktion Beschreibung Lesen aktuelle Achsnummer der vierten beteiligten externen Slaveachse Schreiben Definition einer neuen vierten beteiligten externen Slaveachse (Eingabe der Achsnummer) Wertebereich 0, 21, 22, 31, 32 .. 81, 82 Wert nach Reset Falls eine Linearinterpolation mit externen Slaveachsen ausgeführt werden soll,...
-
Seite 254: Kommandoübersicht: Linearinterpolation
Kommandoregister 1xy001 der betreffenden Master- oder Slaveachse geschrieben. Ein Kommando ist aktiv, bis ein gegenteiliges Kommando gegeben wird. Kommando-Nr. Kommandos: Linearinterpolation Achse 1 ist Slave Achse 2 ist Slave Master-Slave-Konfiguration 1 Master-Slave-Konfiguration 2 Master-Slave-Konfiguration 3 Start Interpolation Achse aus Interpolation nehmen Master-Slave-Konfiguration 4 Master-Slave-Konfiguration 5 Jetter AG... -
Seite 255: Kreisinterpolation Mit 2 Achsen
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Kreisinterpolation mit 2 Achsen 8.2.1 Überblick Aufgrund der Komplexität der Thematik und der technischen Ausführung ist das Kapitel "Kreisinterpolation" untergliedert in: • Kapitel 8.2: "Kreisinterpolation mit 2 Achsen", Seite 255, ff; • Kapitel 8.3: "Kreisinterpolation mit 3 Achsen", Seite 286, ff. - Seite 256 "Kreisinterpolation mit 3 Achsen", Seite 286). Generell gilt, dass alle beteiligten Achsen immer gleichzeitig starten, sich in Abhängigkeit voneinander bewegen und zum gleichen Zeitpunkt ihre Endpositionen erreichen. In die Berechnung der resultierenden Bewegung fließen die Werte aller beteiligten Achsen mit ein. Jetter AG...
-
Seite 257: Kreisinterpolation Mit 2 Achsen Und Dem Modul Jx6-Con-Move(-Bp)
Parameter, wie Start- und Stopprampe, Sollgeschwindigkeit und Zielfenster, werden ebenfalls als Parameter der koordinierten Bewegung verwendet. Im Modul JX6-CON-Move(-BP) werden intern der Radius, der Startwinkel, die Kreisbogenlänge und die Zielpositionen beider Achsen errechnet. Das Reglermodul JX6-CON-Move(-BP), auf welchem die Masterachse angesprochen werden soll, hat die Bezeichnung Mastermodul. -
Seite 258: Allgemeine Voraussetzungen
Bevor die Kreisinterpolation gestartet werden kann, müssen wie bei der Linearinterpolation die Maximalgeschwindigkeiten und Geberauflösungen an die Masterachse angepasst werden. Danach werden alle virtuellen Achsen gleichzeitig gestartet und die physikalischen Achsen werden im Verhältnis ihres Anteils an der Bewegung nach ihren virtuellen Achsen geregelt. Jetter AG... -
Seite 259: Konfigurationen
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen 8.2.3 Konfigurationen Allgemeine Festlegungen: Die Achsen werden immer über ein Submodul JX6-SB, welches auf einem Reglermodul JX6-CON-Move(-BP) platziert ist, definiert. Gehäuse Steckplatz 1 JX6-CON- Move (-BP) Submodul 3 = leer Submodul 2 = leer... - Seite 260 Koordination als Masterachse angesprochen wird, Mastermodul genannt. Hinweis! Für die Ausführung von Interpolationen ist beim Hardwareaufbau zu beachten: Sollen Achsen benutzt werden, die sich auf verschiedenen Reglermodulen und damit auf verschiedenen Steckplätzen befinden, so sind nur Module des Typs JX6-CON-Move-BP zugelassen. Jetter AG...
-
Seite 261: Mögliche Achskonfigurationen
Achse eines anderen Moduls sind beteiligt. Hinweis! Es können generell nur die beiden physikalischen Achsen 1 und 2 eines Reglermoduls JX6-CON-Move(-BP) an dieser Art der Kreisinterpolationen beteiligt sein. Prinzipiell ist es möglich, innerhalb der Steuerung mehrere Interpolationen gleichzeitig auszuführen. -
Seite 262: Kreisinterpolation Mit 2 Achsen Konfigurationen Variante
Master-Modul => Softwareachse 4 = Masterachse Abb. 61: Aufbau zur Kreisinterpolation Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move oder ein Modul JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21 und 22 konfiguriert werden. - Seite 263 Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Für eine Kreisinterpolation ist die Benutzung von Erweiterungsmodulen auf den Steckplätzen 2 bis 8 möglich. Der Steckplatz 1 ist generell dem CPU-Modul vorbehalten. Folglich ergeben sich für die Variante 1 nachstehende Konfigurationsmöglichkeiten: Die Achsen 21 und 22, bzw. 31 und 32, 41 und 42, 51 und 52, 61 und 62, 71 und 72 oder 81 und 82 sind für eine Kreisinterpolation kombinierbar.
-
Seite 264: Abb. 62: Aufbau Zur Kreisinterpolation Variante 2
Wert wird für die Startpunktberechnung benötigt und muss im Masterregister 1x4150 parametriert werden. Mit der Entscheidung, welches Register als Masterregister benutzt wird, wird gleichzeitig festgelegt, welches Modul das Mastermodul ist. Für die vorstehend beispielhaft dargestellte Variante 2 ergeben sich zwei Möglichkeiten der Parametrierung: Jetter AG... - Seite 265 Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Register 124150 wird parametriert: • das Modul 2 ist das Mastermodul, • die Achse 31 ist die externe Achse, • der Registerinhalt ist der Wert, welcher der letzten Sollposition der Achse 31 entspricht.
-
Seite 266: Abb. 63: Aufbau Zur Kreisinterpolation Variante 3
Die Benutzung anderer Steckplätze für die Achsmodule ist möglich. Es muss dann aber die hardwaremäßige Bustrennung zwischen Steckplatz 4 und 5 beachtet werden. Das bedeutet, alle genutzten Module müssen sich entweder auf den Steckplätzen 2 bis 4 oder 5 bis 8 befinden. Jetter AG... - Seite 267 Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Für die Variante 3 ergeben sich folgende Konfigurationsmöglichkeiten: Steckplatz Achs- nummern- paare hardwaremäßige Bustrennung Kombinationen über die Bustrennung hinweg sind nicht zulässig! Jetter AG...
-
Seite 268: Programmier-Hinweise
Register 1x4006 = __ Stopprampe Register 1x4007 = __ Zielfensterbereich Werden keine Werte festgelegt, so gelten die Einstellungen der Achse 1 des Mastermoduls. Achtung: Der Bezugswert zur Sollgeschwindigkeit wird aber im Register der Datenachse eingestellt. Register 1x1021 = Bezugswert zur Sollgeschwindigkeit Jetter AG... - Seite 269 Reglermodul intern auf die Werte zugreifen. Es muss keine explizite Parametrierung durchgeführt werden. Befinden sich die beiden an der Kreisinterpolation beteiligten Achsen nicht auf einem Reglermodul JX6-CON-Move(-BP), muss dem Master die letzte Sollposition der externen Achse mitgeteilt werden. Dazu wird das Masterregister 1x4150 benutzt.
- Seite 270 Hat nun die zweite an der Interpolation beteiligte Slaveachse eine andere Geberauflösung als die Datenachse, so muss das Register 1xy052 dieser Slaveachse parametriert werden. Der Wert berechnet sich nach folgender Formel: GSZSlaveAchse × ------------------------------------------------ - Register1xy052 1.000 GSZDatenAchse GSZ = Geberauflösung in Register 1xy017 Jetter AG...
-
Seite 271: Beispiele Zur Anpassung Von Maximalgeschwindigkeit Und Geberauflösung
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Beispiele zur Anpassung von Maximalgeschwindigkeit und Geberauflösung Die 3 folgenden Beispiele basieren auf der Annahme, dass die Achse 31 ein externer Slave zur Achse 21 ist. Somit ist die Achse 21 als Datenachse und die Achse 31 als Slaveachse definiert. - Seite 272 Das Slaveregister 131051 wird mit dem Wert des Registers der Datenachse, also mit dem Wert 3.000 parametriert. GSZSlaveAchse × ------------------------------------------------ - Register1xy052 1.000 GSZDatenAchse --------- - 2.500 × ------------------------- Register131052 1.000 --------- - 1.024 Register131052 2.441,41 Das Slaveregister 131052 wird mit dem Wert 2.441 parametriert. Jetter AG...
- Seite 273 Informationen zur Kreisinterpolation. Die Registerinhalte werden Informationen intern im Reglermodul JX6-CON-Move(-BP) berechnet und aktualisiert. Der Anwender kann diese Register nur abfragen (ein Beschreiben ist nicht zulässig) und die zur Verfügung gestellten Daten als Information (z. B. für Visualisierungszwecke) bzw. zu weiteren Berechnungen nutzen.
- Seite 274 Register 1xy000, Bit 13 = 0 ? Wenn das Bit 13 wieder 0 ist, kann man davon ausgehen, dass alle Achsen vom Bus getrennt und definiert angehalten sind. Beispielprogramme zu den einzelnen Varianten befinden sich auf der CD, welche dem Buch beiliegt. Jetter AG...
-
Seite 275: Registerübersicht: Kreisinterpolation Mit 2 Achsen
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen 8.2.5 Registerübersicht: Kreisinterpolation mit 2 Achsen Die Registerübersicht enthält alle für eine Kreisinterpolation mit 2 Achsen benutzten Register. Sie können als Register sowohl für die Masterachse als auch für Slaveachsen benötigt werden. Eine ausführliche Beschreibung befindet sich im nachfolgenden Kapitel. - Seite 276 JetWeb Berechnete Kreisbogenlänge der Kreisinterpolation Berechnete Zielposition Achse 1 (Master) Berechnete Zielposition Achse 2 (Slave) Anpassung der Maximalgeschwindigkeiten an die Datenachse Anpassung der Geberauflösungen an die Datenachse Achsnummer Achse 1 Achsnummer Achse 2 Letzte Sollposition von externer Achse Jetter AG...
-
Seite 277: Registerbeschreibung: Kreisinterpolation Mit 2 Achsen
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen 8.2.6 Registerbeschreibung: Kreisinterpolation mit 2 Achsen Register 1x4041 Mittelpunkt Achse 1 Funktion Beschreibung Lesen aktueller Wert für den Mittelpunkt der Achse 1 Schreiben Übergabe eines neuen Wertes für den Mittelpunkt der Achse 1 Wertebereich -8.388.608 .. -
Seite 278: Sollwinkel Der Kreisinterpolation
Radius Schreiben nicht zulässig Wertebereich -524.207 .. +524.207 Wert nach Reset Aus den Parametern der Register 1x4041, 1x4042 und 1x4045 errechnet das Modul JX6-CON-Move(-BP) intern den Radius der Kreisinterpolation, auf den in diesem Register zugegriffen werden kann. Jetter AG... -
Seite 279: Berechneter Startwinkel Der Kreisinterpolation
Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Aus den Parametern der Register 1x4041, 1x4042 und 1x4045 errechnet das Modul JX6-CON-Move(-BP) intern den Startwinkel der Kreisinterpolation, auf den in diesem Register zugegriffen werden kann. Berechnete Kreisbogenlänge Register 1x4048 der Kreisinterpolation... - Seite 280 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Aus den Parametern der Register 1x4041, 1x4042 und 1x4045 errechnet das Modul JX6-CON-Move(-BP) intern die Zielposition der Achse 1, auf die in diesem Register zugegriffen werden kann. Berechnete Zielposition Register 1xy050 Achse 2 (Slave)
-
Seite 281: Register 1Xy051: Maximalgeschwindigkeiten An Die Datenachse
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Anpassung der Register 1xy051: Maximalgeschwindigkeiten an die Datenachse Funktion Beschreibung Lesen aktueller Wert für die Geschwindigkeitsanpassung Schreiben Übergabe eines neuen Wertes für die Anpassung der Geschwindigkeit Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Die Geschwindigkeitsanpassung muss immer dann durchgeführt werden, wenn die... -
Seite 282: Geberauflösungen An Die Datenachse
Hat nun die zweite an einer Interpolation beteiligte Slaveachse eine andere Geberauflösung als die Datenachse, so muss das Register 1xy052 dieser Slaveachse parametriert werden. Der Wert berechnet sich nach folgender Formel: GSZSlaveAchse × Register1xy052 ------------------------------------------------ - 1.000 GSZDatenAchse GSZ = Geberauflösung in Register 1xy017 Jetter AG... - Seite 283 Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen Register 1x4128 Achsnummer Achse 1 Funktion Beschreibung Lesen aktuelle Achsnummer der ersten beteiligten Achse Schreiben Definition einer neuen ersten beteiligten Achse Wertebereich 0, 21, 31, 41 .. 81 Wert nach Reset Dem Master muss mitgeteilt werden, welche Achsen an der Kreisinterpolation beteiligt sind.
-
Seite 284: Letzte Sollposition Von Externer Achse
Das Register muss immer dann parametriert werden, wenn sich die beteiligten Achsen nicht auf einem Modul befinden. Die Parametrierung hat Auswirkungen auf die Festlegung der Konfiguration der beteiligten Achsen. Außerdem werden die letzten beiden Sollpositionen der Achsen zur Berechnung des Startpunktes des Kreisbogens benötigt. Jetter AG... -
Seite 285: Kommandoübersicht: Kreisinterpolation Mit 2 Achsen
Modul JX6-CON-Move(-BP) 8.2 Kreisinterpolation mit 2 Achsen 8.2.7 Kommandoübersicht: Kreisinterpolation mit 2 Achsen Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für eine Kreisinterpolation mit 2 Achsen benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der betreffenden Master- oder Slaveachse geschrieben. -
Seite 286: Kreisinterpolation Mit 3 Achsen
8.3.2 Kreisinterpolation mit 3 Achsen und dem Modul JX6-CON-Move(-BP) Das Modul JX6-CON-Move(-BP) ist mit einer integrierten Bahnsteuerung ausgestattet, die es ermöglicht, auch 3D-Kreisinterpolationen auszuführen. Nutzt man die "Kreisinterpolation mit 3 Achsen", kann ein 2D-Kreis im 3D-Raum abgefahren werden. Diese Art der Interpolation ist auch als fortlaufende Interpolation ausführbar (siehe dazu Kapitel 8.5: "Fortlaufende Interpolation", Seite 354). -
Seite 287: Eingabe Über Teachwerte
Achsen. Die Masterachse dagegen ist eine virtuelle Softwareachse. Das bedeutet, sie ist physikalisch nicht vorhanden. Für die internen Berechnungen zur Ausführung der Interpolation wird in der Software innerhalb des Moduls JX6-CON-Move(-BP) ein virtuelles Abbild aller Achsen geschaffen. Das Ergebnis der Berechnungen spiegelt sich in der Masterachse wieder. -
Seite 288: Eingabe Über Winkel
Register 1x4087 = 0 Register 1x4088 = 0 Register 1x4089 = 0 Fall 2: Kreis um die X-Z-Ebene, Ebene 90 ° um die X-Achse gedreht Register-Parametrierung Register 1x4087 = 90.000 (entspricht 90 °) Register 1x4088 = 0 Register 1x4089 = 0 Jetter AG... - Seite 289 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Fall 3: Kreis um die Y-Z-Ebene, Ebene 90 ° um die Y-Achse gedreht Register-Parametrierung Register 1x4087 = 0 Register 1x4088 = 90.000 (entspricht 90 °) Register 1x4089 = 0 Fall 4: Kreis um die X-Y-Ebene, Ebene 90 ° um die Z-Achse gedreht...
-
Seite 290: Konfigurationen
8 Bahnsteuerungen JetWeb 8.3.3 Konfigurationen Allgemeine Festlegungen: Die Achsen werden immer über ein Submodul JX6-SB, welches auf einem Reglermodul JX6-CON-Move(-BP) platziert ist, definiert. Gehäuse Steckplatz 1 JX6-CON- Move (-BP) Submodul 3 = leer Submodul 2 = leer Submodul 1 = JX6-SB... - Seite 291 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Maximal 3 Achsen können an dieser Art der Kreisinterpolation beteiligt sein. Die Softwareachse, die virtuelle Achse 4 eines Moduls, ist die Masterachse der gesamten Kreisinterpolation. Diese Softwareachse bestimmt die Parametrierung der koordinierten Bewegungen.
-
Seite 292: Kreisinterpolation Mit 3 Achsen Konfigurationen Variante
Master-Modul => Softwareachse 4 = Masterachse Abb. 65: Aufbau zur 3D-Kreisinterpolation Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move oder ein Modul JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21, 22 und 23 konfiguriert werden. -
Seite 293: Programmier-Hinweise
Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen 8.3.4 Programmier-Hinweise Die Konfigurationsmöglichkeiten für die Kreisinterpolation mit 3 Achsen sind durch die Variante 1 relativ fest vorgegeben. Jedoch ist der Ablauf der Programmierung für die folgenden beiden Möglichkeiten recht unterschiedlich: • Parametrierung der Kreisbewegung über Winkel;... - Seite 294 Dazu wird das Bit 13 (BUSY) des Statusregisters der ersten beteiligten abwarten physikalischen Achse abgefragt. *** T *** Register 1xy000, Bit 13 = 0 ? Wenn das Bit 13 wieder 0 ist, kann man davon ausgehen, dass die Berechnung beendet ist. Jetter AG...
- Seite 295 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Ergebnis- Tritt bei der Berechnung ein Fehler auf, so wird im Fehlerregister 1x1166 ein auswertung der entsprechendes Bit gesetzt. Siehe Registerbeschreibung für die Zuordnung Berechnung der Bits und der Fehler. *** T ***...
- Seite 296 überwacht, indem das Statusregister-Bit 1 aller beteiligten physikalischen abwarten Achsen abgefragt wird (Bit 1: Haltachse = Position wurde erreicht). Register 1xy000, Bit 1 = 1 ? Wenn das Bit 1 aller beteiligten physikalischen Achsen gleich 1 ist, kann der Interpolationsmodus aufgehoben werden. Jetter AG...
- Seite 297 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Kommando 42 Um den Modus der koordinierten Bewegungen für die Achsen wieder beendet aufzuheben, ist allen beteiligten physikalischen Achsen das Kommando 42 Interpolation zu geben. Dabei wird gleichzeitig ein HALTACHSE-Befehl ausgeführt. Register 1xy001 = 42...
-
Seite 298: Registerübersicht: Kreisinterpolation Mit 3 Achsen
Bezugswert zur Sollgeschwindigkeit der Achse Hinweis! Eine detaillierte Beschreibung der allgemeinen Register befindet sich in den Kapiteln 6.2 bis 6.7. 041 - Register: Kreisinterpolation mit 3 Achsen Mittelpunkt 1 Mittelpunkt 2 Sollwinkel Mittelpunkt virtuelle Achse 1 Mittelpunkt virtuelle Achse 2 Jetter AG... - Seite 299 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Kreiswinkel virtuelle Achsen X-Koordinate Teachpunkt 1 Y-Koordinate Teachpunkt 1 Z-Koordinate Teachpunkt 1 X-Koordinate Teachpunkt 2 Y-Koordinate Teachpunkt 2 Z-Koordinate Teachpunkt 2 X-Koordinate Teachpunkt 3 Y-Koordinate Teachpunkt 3 Z-Koordinate Teachpunkt 3 Verdrehung um X-Achse...
-
Seite 300: Registerbeschreibung: Kreisinterpolation Mit 3 Achsen
Ergebnis der Berechnung des Mittelpunktes der virtuellen Achse 1 wird in dieses Register eingetragen; das heißt: Inhalt Register 1x4041 = Inhalt Register 1x4074. Hinweis! Das Register 1xy041 wird in anderen Spezialfunktionen ebenfalls benutzt, aber mit anderer Bedeutung und Wirkungsweise. Jetter AG... - Seite 301 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4042 Mittelpunkt 2 Funktion Beschreibung Lesen aktueller Wert für den Mittelpunkt 2 Schreiben Übergabe eines neuen Wertes für den Mittelpunkt 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Für den Fall der Parametrierung der Kreisbewegung über Winkel gilt: •...
- Seite 302 Für den Fall der Parametrierung der Kreisbewegung über Teachwerte gilt: • das Ergebnis der Berechnung des Sollwinkels wird in dieses Register eingetragen; das heißt: Inhalt Register 1x4045 = Inhalt Register 1x4076. Hinweis! Das Register 1xy045 wird in anderen Spezialfunktionen ebenfalls benutzt, aber mit anderer Bedeutung und Wirkungsweise. Jetter AG...
- Seite 303 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4074 Mittelpunkt virtuelle Achse 1 Funktion Beschreibung Lesen Ergebnis der Berechnung des Mittelpunktes 1 bei der 3D-Kreisinterpolation über Teachwerte Schreiben nicht zulässig Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Für den Fall der Parametrierung der Kreisbewegung über Teachwerte muss der Inhalt dieses Registers nach Abschluss der Berechnung in das Register 1x4041 kopiert werden.
- Seite 304 Übergabe eines neuen Wertes für die X-Koordinate des Teachpunktes 1 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte benutzt. Es wird hier die X-Koordinate des Teachpunktes 1 definiert. Jetter AG...
- Seite 305 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4078 Y-Koordinate Teachpunkt 1 Funktion Beschreibung Lesen aktueller Wert der Y-Koordinate des Teachpunktes 1 Schreiben Übergabe eines neuen Wertes für die Y-Koordinate des Teachpunktes 1 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte...
- Seite 306 Übergabe eines neuen Wertes für die Y-Koordinate des Teachpunktes 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte benutzt. Es wird hier die Y-Koordinate des Teachpunktes 2 definiert. Jetter AG...
- Seite 307 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4082 Z-Koordinate Teachpunkt 2 Funktion Beschreibung Lesen aktueller Wert der Z-Koordinate des Teachpunktes 2 Schreiben Übergabe eines neuen Wertes für die Z-Koordinate des Teachpunktes 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte...
- Seite 308 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte benutzt. Es wird hier die X-Koordinate des Teachpunktes 3 definiert. Hinweis! Das Register 1xy083 wird in anderen Spezialfunktionen ebenfalls benutzt, aber mit anderer Bedeutung und Wirkungsweise. Jetter AG...
- Seite 309 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4084 Y-Koordinate Teachpunkt 3 Funktion Beschreibung Lesen aktueller Wert der Y-Koordinate des Teachpunktes 3 Schreiben Übergabe eines neuen Wertes für die Y-Koordinate des Teachpunktes 3 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte...
- Seite 310 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte benutzt. Es wird hier die Z-Koordinate des Teachpunktes 3 definiert. Hinweis! Das Register 1xy085 wird in anderen Spezialfunktionen ebenfalls benutzt, aber mit anderer Bedeutung und Wirkungsweise. Jetter AG...
-
Seite 311: Verdrehung Um X-Achse
Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4087 Verdrehung um X-Achse Funktion Beschreibung Lesen aktueller Wert der Verdrehung um die X-Achse Schreiben Übergabe eines neuen Wertes für die Verdrehung um die X-Achse Wertebereich -180.000 .. +180.000 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über Winkel... -
Seite 312: Verdrehung Um Z-Achse
Übergabe eines neuen Wertes für den Puffer Wertebereich 1 .. 10 Wert nach Reset Dieses Register wird bei der Parametrierung der Kreisbewegung über 3 Teachwerte benutzt. Hier wird definiert, welche Kreisbewegung als nächstes berechnet werden soll. Es können maximal 10 Kreise vorausberechnet werden. Jetter AG... - Seite 313 Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen Register 1x4128 Achsnummer Achse 1 Funktion Beschreibung Lesen aktuelle Achsnummer der ersten beteiligten Achse Schreiben Definition einer neuen ersten beteiligten Achse Wertebereich 0, 21, 31, 41 .. 81 Wert nach Reset Dem Master muss mitgeteilt werden, welche Achsen an der Kreisinterpolation beteiligt sind.
- Seite 314 Endpunkt, oder Endpunkt und Startpunkt kleiner als 100 Inkremente sind, wird dieses Bit gesetzt. Alle 3 Teachpunkte befinden sich auf einer Geraden Wenn der Betrag des Quadrates kleiner als 173 Inkremente ist, dann wird dieses Bit gesetzt. Fehler interne Speicheranforderung Jetter AG...
-
Seite 315: Kommandoübersicht: Kreisinterpolation Mit 3 Achsen
Modul JX6-CON-Move(-BP) 8.3 Kreisinterpolation mit 3 Achsen 8.3.7 Kommandoübersicht: Kreisinterpolation mit 3 Achsen Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für eine Kreisinterpolation mit 3 Achsen benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der betreffenden Master- oder Slaveachse geschrieben. -
Seite 316: Kombinierte Kreis- Und Linearinterpolation
Achsen. Die Masterachse dagegen ist eine virtuelle Softwareachse. Das bedeutet, sie ist physikalisch nicht vorhanden. Für die internen Berechnungen zur Ausführung der Interpolation wird in der Software innerhalb des Moduls JX6-CON-Move-BP ein virtuelles Abbild aller Achsen geschaffen. Das Ergebnis der Berechnungen spiegelt sich in der Masterachse wieder. -
Seite 317: Allgemeine Voraussetzungen
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Allgemeine Voraussetzungen Für die Funktion einer kombinierten Kreis- und Linearinterpolation sind einige wesentliche Punkte zu beachten: • Generell ist ein sorgfältiger Abgleich der Regler die Voraussetzung für das fehlerfreie Funktionieren von Achsbewegungen. Alle Regler (Momenten-, Drehzahl- und Lageregler) müssen nacheinander in der genannten Reihenfolge... -
Seite 318: Konfigurationen
= logische Achs-Nr. 22 Master-Modul => Software-Achse 4 = Masterachse Abb. 66: Kombinierte Kreis- und Linearinterpolation - Achskonfigurationen Hinweis! Es können generell nur die beiden physikalischen Achsen 1 und 2 eines Reglermoduls JX6-CON-Move-BP an dieser Art der Interpolationen beteiligt sein. Jetter AG... - Seite 319 Alle beteiligten physikalischen Achsen werden als Slaves betrachtet. Hinweis! Für die Ausführung dieser Art der Interpolation ist beim Hardwareaufbau zu beachten: Da Achsen benutzt werden, die sich auf verschiedenen Reglermodulen und damit auf verschiedenen Steckplätzen befinden, sind nur Module des Typs JX6-CON-Move-BP zugelassen. Jetter AG...
-
Seite 320: Mögliche Achskonfigurationen
Es muss dann aber die hardwaremäßige Bustrennung zwischen Steckplatz 4 und 5 beachtet werden. Das bedeutet, man kann die Reglermodule auf den Steckplätzen 2 bis 4 für eine Interpolation und die Module auf den Steckplätzen 5 bis 8 für eine andere Interpolation verwenden. Jetter AG... -
Seite 321: Abb. 67: Aufbau Zur Kombinierten Interpolation Variante 1
Master-Modul => Softwareachse 4 = Masterachse Abb. 67: Aufbau zur kombinierten Interpolation Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21 und 22 für die Kreisinterpolation konfiguriert werden. - Seite 322 61, 62 51, 52, 71, 72, 81, 82 Achsen sind zusätzlich für die Linearinterpolation 71, 72 51, 52, 61, 62, 81, 82 kombinierbar 81, 82 51, 52, 61, 62, 71, 72 Kombinationen über die Bustrennung hinweg sind nicht zulässig! Jetter AG...
-
Seite 323: Abb. 68: Aufbau Zur Kombinierten Interpolation Variante 2
Der Hardwareaufbau ist identisch zur Variante 1 gewählt, um zu verdeutlichen, dass der Anwender Einfluss auf die Konfigurationen nehmen kann. Auf den Steckplätzen 2 und 3 des Gehäuses sind Module JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist jeweils ein Modul JX6-SB integriert, über welches die Achsen konfiguriert werden. - Seite 324 Die Benutzung anderer Steckplätze für die Achsmodule ist möglich. Es muss dann aber die hardwaremäßige Bustrennung zwischen Steckplatz 4 und 5 beachtet werden. Das bedeutet, alle genutzten Module müssen sich entweder auf den Steckplätzen 2 bis 4 oder 5 bis 8 befinden. Jetter AG...
- Seite 325 Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Für die Variante 2 ergeben sich folgende Konfigurationsmöglichkeiten: An der Für die Hinweis Kreisinterpolation Linearinterpolation beteiligte Achsen kombinierbare Achsen 21, 31 22, 32, 41, 42 jeweils alle 4 Achsen oder nur einzelne Achsen davon sind...
-
Seite 326: Abb. 69: Aufbau Zur Kombinierten Interpolation Variante 3
Master-Modul => Softwareachse 4 = Masterachse Abb. 69: Aufbau zur kombinierten Interpolation Variante 3 Auf den Steckplätzen 2, 3 und 4 des Gehäuses sind Module JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist jeweils ein Modul JX6-SB integriert, über welches die Achsen konfiguriert werden. - Seite 327 Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Die physikalisch erste Achse des Reglermoduls auf dem Steckplatz 2 (Achse 21) und die physikalisch zweite Achse des Reglermoduls auf dem Steckplatz 3 (Achse 32) sind an der Kreisinterpolation beteiligt. Die beiden Achsen des Reglermoduls auf dem Steckplatz 4 (Achse 41 und 42) sind die Achsen, die zusätzlich linearinterpoliert werden sollen.
- Seite 328 51, 52, 61, 62, 72, 81 81, 52 51, 61, 62, 71, 72, 82 81, 62 51, 52, 61, 71, 72, 82 81, 72 51, 52, 61, 62, 71, 82 Kombinationen über die Bustrennung hinweg sind nicht zulässig! Jetter AG...
-
Seite 329: Programmier-Hinweise
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation 8.4.4 Programmier-Hinweise Ein Modul zum Ein Modul wird zum Mastermodul deklariert. Diese Deklaration ist Master konfigurationsabhängig, erfordert keinen speziellen Befehl und wird durch deklarieren die Benutzung der Masterregister bestimmt. Die Achse 4 des Mastermoduls ist ab sofort die Masterachse für die Interpolation. - Seite 330 Reglermodul intern auf die Werte zugreifen. Es muss keine explizite Parametrierung durchgeführt werden. Befinden sich die beiden an der Kreisinterpolation beteiligten Achsen nicht auf einem Reglermodul JX6-CON-Move-BP, muss dem Master die letzte Sollposition der externen Achse mitgeteilt werden. Dazu wird das Masterregister 1x4150 benutzt.
- Seite 331 Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Sollwinkel Ebenfalls zwingend notwendig ist die Parametrierung des gewünschten eingeben Sollwinkels, der mit der koordinierten Bewegung überstrichen werden soll. Dieser Wert wird wiederum in ein Masterregister eingetragen. Dazu muss die Gradangabe des Winkels in einen Dezimalwert umgerechnet werden.
- Seite 332 Hat nun eine an der Interpolation beteiligte Slaveachse eine andere Geberauflösung als die Datenachse, so muss das Register 1xy052 dieser Slaveachse parametriert werden. Der Wert berechnet sich nach folgender Formel: GSZSlaveAchse ------------------------------------------------ - × Register1xy052 1.000 GSZDatenAchse GSZ = Geberauflösung in Register 1xy017 Jetter AG...
-
Seite 333: Beispiele Zur Anpassung Von Maximalgeschwindigkeit Und Geberauflösung
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Beispiele zur Anpassung von Maximalgeschwindigkeit und Geberauflösung Die 3 folgenden Beispiele basieren auf der Annahme, dass die Achse 31 ein externer Slave zur Achse 21 ist. Somit ist die Achse 21 als Datenachse und die Achse 31 als Slaveachse definiert. - Seite 334 Das Slaveregister 131051 wird mit dem Wert des Registers der Datenachse, also mit dem Wert 3.000 parametriert. GSZSlaveAchse ------------------------------------------------ - × Register1xy052 1.000 GSZDatenAchse --------- - 2.500 × Register131052 ------------------------- 1.000 --------- - 1.024 Register131052 2.441,41 Das Slaveregister 131052 wird mit dem Wert 2.441 parametriert. Jetter AG...
- Seite 335 Informationen zur Kreisinterpolation. Die Registerinhalte werden Informationen intern im Reglermodul JX6-CON-Move-BP berechnet und aktualisiert. Der Anwender kann diese Register nur abfragen (ein Beschreiben ist nicht zulässig) und die zur Verfügung gestellten Daten als Information (z. B. für Visualisierungszwecke) bzw. zu weiteren Berechnungen nutzen.
- Seite 336 Register 1xy000, Bit 13 = 0 ? Wenn das Bit 13 wieder 0 ist, kann man davon ausgehen, dass alle Achsen vom Bus getrennt und definiert angehalten sind. Beispielprogramme zu den einzelnen Varianten befinden sich auf der CD, welche dem Buch beiliegt. Jetter AG...
-
Seite 337: Registerübersicht: Kombinierte Kreis- U. Linearinterpolation
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation 8.4.5 Registerübersicht: Kombinierte Kreis- u. Linearinterpolation Die Registerübersicht enthält alle für eine kombinierte Kreis- und Linearinterpolation benutzten Register. Sie können als Register sowohl für die Masterachse als auch für Slaveachsen benötigt werden. Eine ausführliche Beschreibung befindet sich im nachfolgenden Kapitel. - Seite 338 Achsnummer externer Slave 1 4133 Achsnummer externer Slave 2 4134 Achsnummer externer Slave 3 4135 Achsnummer externer Slave 4 051 - Gemeinsam benutzte Register: Kreis- und Linearinterpolation Anpassung der Maximalgeschwindigkeiten an die Datenachse Anpassung der Geberauflösungen an die Datenachse Jetter AG...
-
Seite 339: Registerbeschreibung: Kombinierte Kreis- U. Linearinterpolation
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation 8.4.6 Registerbeschreibung: Kombinierte Kreis- u. Linearinterpolation Register zur Kreisinterpolation: Register 1x4041 Mittelpunkt Achse 1 Funktion Beschreibung Lesen aktueller Wert für den Mittelpunkt der Achse 1 Schreiben Übergabe eines neuen Wertes für den Mittelpunkt der Achse 1 Wertebereich -8.388.608 .. - Seite 340 Neben dem Mittelpunkt dieser Achse müssen als Voraussetzung zur Kreisinterpolation der Mittelpunkt der Achse 1 (Register 1x4041) und der zu überstreichende Sollwinkel der Interpolation (Register 1x4045) definiert werden. Hinweis! Die Differenz (Mittelpunkt x) minus (Startpunkt x) darf den Wert ±524.207 inc nicht überschreiten. Jetter AG...
-
Seite 341: Sollwinkel Der Kreisinterpolation
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Sollwinkel der Register 1x4045 Kreisinterpolation Funktion Beschreibung Lesen aktueller Wert für den Sollwinkel des Kreisbogens Schreiben Übergabe eines neuen Wertes für den Sollwinkel Wertebereich -8.388.608 .. +8.388.607 32.768 = 360° Wert nach Reset In diesem Register wird der Sollwinkel des Kreisbogens definiert, welchen die beiden Achsen während einer Kreisinterpolation beschreiben. -
Seite 342: Berechneter Radius Der Kreisinterpolation
Wertebereich -524.207 .. +524.207 Wert nach Reset Aus den Parametern der Register 1x4041, 1x4042 und 1x4045 errechnet das Modul JX6-CON-Move(-BP) intern den Radius der Kreisinterpolation, auf den in diesem Register zugegriffen werden kann. Berechneter Startwinkel der Register 1x4047 Kreisinterpolation... -
Seite 343: Berechnete Kreisbogenlänge Der Kreisinterpolation
Zielposition der Achse 1 Schreiben nicht zulässig Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Aus den Parametern der Register 1x4041, 1x4042 und 1x4045 errechnet das Modul JX6-CON-Move(-BP) intern die Zielposition der Achse 1, auf die in diesem Register zugegriffen werden kann. Jetter AG... - Seite 344 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Aus den Parametern der Register 1x4041, 1x4042 und 1x4045 errechnet das Modul JX6-CON-Move(-BP) intern die Zielposition der Achse 2, auf die in diesem Register zugegriffen werden kann. Register 1x4128 Achsnummer Achse 1 Funktion...
-
Seite 345: Letzte Sollposition Von Externer Achse
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Register 1x4129 Achsnummer Achse 2 Funktion Beschreibung Lesen aktuelle Achsnummer der zweiten beteiligten Achse Schreiben Definition einer neuen zweiten beteiligten Achse Wertebereich 0, 21, 22, 31, 32 .. 81, 82 Wert nach Reset Dem Master muss mitgeteilt werden, welche Achsen an der Kreisinterpolation beteiligt sind. -
Seite 346: Register Zur Linearinterpolation
Das Register muss vor dem Start der Funktion parametriert werden, falls diese Achse an der Interpolation beteiligt ist. Die Slaveachse muss zuvor als solche deklariert werden (per Kommando 32 für die jeweils 1. Achse eines Erweiterungsmoduls bzw. mit Kommando 33 für die jeweils 2. Achse des Moduls). Jetter AG... - Seite 347 Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Register 1x4033: Sollposition externer Slave 2 Funktion Beschreibung Lesen Wert der aktuellen Sollposition für den externen Slave 2 Schreiben Übergabe einer neuen Sollposition für externen Slave 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Für die Linearinterpolation (im Rahmen der kombinierten Interpolation) muss der...
- Seite 348 Wert nach Reset Falls eine Linearinterpolation mit externen Slaveachsen ausgeführt werden soll, muss dem Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der ersten beteiligten externen Slaveachse eingetragen werden. Jetter AG...
- Seite 349 Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Register 1x4133: Achsnummer externer Slave 2 Funktion Beschreibung Lesen aktuelle Achsnummer der zweiten beteiligten externen Slaveachse Schreiben Definition einer neuen zweiten beteiligten externen Slaveachse (Eingabe der Achsnummer) Wertebereich 0, 21, 22, 31, 32 .. 81, 82 Wert nach Reset Falls eine Linearinterpolation mit externen Slaveachsen ausgeführt werden soll,...
- Seite 350 Wert nach Reset Falls eine Linearinterpolation mit externen Slaveachsen ausgeführt werden soll, muss dem Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der vierten beteiligten externen Slaveachse eingetragen werden. Jetter AG...
-
Seite 351: Gemeinsam Benutzte Register Zur Kreis- Und Linearinterpolation
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation Gemeinsam benutzte Register zur Kreis- und Linearinterpolation: Anpassung der Register 1xy051: Maximalgeschwindigkeiten an die Datenachse Funktion Beschreibung Lesen aktueller Wert für die Geschwindigkeitsanpassung Schreiben Übergabe eines neuen Wertes für die Anpassung der Geschwindigkeit Wertebereich -8.388.608 .. -
Seite 352: Geberauflösungen An Die Datenachse
Hat nun eine an einer Interpolation beteiligte Slaveachse eine andere Geberauflösung als die Datenachse, so muss das Register 1xy052 dieser Slaveachse parametriert werden. Der Wert berechnet sich nach folgender Formel: GSZSlaveAchse × Register1xy052 ------------------------------------------------ - 1.000 GSZDatenAchse GSZ = Geberauflösung in Register 1xy017 Jetter AG... -
Seite 353: Kommandoübersicht: Kombinierte Kreis- U. Linearinterpolation
Modul JX6-CON-Move(-BP) 8.4 Kombinierte Kreis- und Linearinterpolation 8.4.7 Kommandoübersicht: Kombinierte Kreis- u. Linearinterpolation Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für eine kombinierte Kreis- und Linearinterpolation benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der betreffenden Master- oder Slaveachse geschrieben. -
Seite 354: Fortlaufende Interpolation
8 Bahnsteuerungen JetWeb Fortlaufende Interpolation 8.5.1 Überblick Mit dieser Spezialfunktion und dem Modul JX6-CON-Move(-BP) ist es möglich, fortlaufende Interpolationen zu realisieren. Dabei werden ganze Kurvenzüge, gewissermaßen am Stück, bearbeitet. 8.5.2 Fortlaufende Interpolation mit dem Modul JX6-CON-Move(-BP) In den vorangegangenen Kapiteln sind die Linear-, die Kreis- und die kombinierte Kreis- und Linearinterpolation als jeweils einzeln ablaufende Aktionen beschrieben. -
Seite 355: Besonderheiten Der Fortlaufenden Interpolation
Die hier definierte „Achse 42“ hat nichts mit der logischen Achsnummer 42 (Nummer der zweiten physikalischen Achse, die über das Submodul JX6-SB auf dem Reglermodul JX6-CON-Move(-BP) auf dem Steckplatz 4 definiert wird) zu tun. Die Benennung „Achse 42“ hat ihren Ursprung in den verwendeten Registernummern. -
Seite 356: Allgemeine Voraussetzungen
Generell ist ein sorgfältiger Abgleich der Regler die Voraussetzung für das fehlerfreie Funktionieren von Achsbewegungen. Alle Regler (Momenten-, Drehzahl- und Lageregler) müssen nacheinander in der genannten Reihenfolge abgeglichen werden. Der Lageregler übernimmt letztendlich die Durchführung von Spezialfunktionen (z. B. Interpolationen). Jetter AG... - Seite 357 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation • Für jede Art der Interpolation ist es unumgänglich, dass zu jedem Zeitpunkt die theoretisch errechneten Sollpositionen möglichst exakt erreicht werden. Deshalb muss über die gesamte Fahrstrecke eine volle Lageregelung realisiert werden. In einer vollen Lageregelung wird die aktuelle Sollposition errechnet und zu jedem Zeitpunkt die Differenz von Soll- und Istposition bestimmt.
-
Seite 358: Konfigurationen
Interpolationsarten bestimmt. Das Mastermodul wird durch die Parametrierung der Interpolation bestimmt, mit welcher die Teilbewegungen ausgeführt werden. Die Softwareachse, die virtuelle „Achse 42“ dieses Mastermoduls koordiniert den Ablauf der fortlaufenden Interpolation. Alle beteiligten physikalischen Achsen werden als Slaves betrachtet. Jetter AG... -
Seite 359: Mögliche Achskonfigurationen
Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Mögliche Achskonfigurationen Es gibt 3 verschiedene Varianten der fortlaufenden Interpolation: Die fortlaufende Interpolation basiert auf einer Linearinterpolation. Die fortlaufende Interpolation basiert auf einer Kreisinterpolation (mit 2 oder 3 Achsen). Die fortlaufende Interpolation basiert auf einer kombinierten Kreis- und Linearinterpolation. -
Seite 360: Abb. 71: Aufbau Zur Fortlaufenden Interpolation Variante 1
Der dargestellte Hardwareaufbau entspricht einer Linearinterpolation der Variante 2. Beide Achsen des Mastermoduls (Achse 21 und Achse 22) sind beteiligt und dazu die externen Achsen 31, 32, 41 und 42. Die logischen Achsnummern stehen jeweils unter der Submodulbezeichnung 1 (JX6-SB). Jetter AG... -
Seite 361: Abb. 72: Aufbau Zur Fortlaufenden Interpolation Variante 2
Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Fortlaufende Interpolation Konfigurationen Variante 2, basierend auf der Kreisinterpolation Fortlaufende Die Variante 2 ist dadurch charakterisiert, dass die Einzelbewegungen des Interpolation Bahnzuges auf Kreisinterpolationen basieren. Es können Kreisinterpolationen basierend auf sowohl mit 2 Achsen, als auch mit 3 Achsen verwendet werden. Demzufolge sind Kreisinterpolation alle im Kapitel 8.2.3 und im Kapitel 8.3.3 aufgeführten Achskonfigurationen... -
Seite 362: Abb. 73: Aufbau Zur Fortlaufenden Interpolation Variante 3
Achse (in diesem Fall die Achse 31) muss vor dem Start der Kreisinterpolation im entsprechenden Register der „Achse 42“ hinterlegt werden. Dies muss immer realisiert werden, wenn eine kombinierte Kreis- und Linearinterpolation der Variante 2 als fortlaufende Interpolation ausgeführt werden sollen. Jetter AG... -
Seite 363: Programmier-Hinweise
Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation 8.5.4 Programmier-Hinweise Für die Programmierung einer fortlaufenden Interpolation gelten die Programmierhinweise für die Interpolationsart, auf der die fortlaufende Interpolation basiert. Details befinden sich: • im Kapitel 8.1.4 (für Linearinterpolationen), • im Kapitel 8.2.4 (für Kreisinterpolationen mit 2 Achsen), •... - Seite 364 Dem Master muss mitgeteilt werden, welche physikalischen Achsen an der im Master Kreisinterpolation beteiligt sind. Dafür erfolgt in den entsprechenden registrieren Masterregistern der Eintrag der logischen Achsnummern. *** KI *** Register 1x4128 = __ Achsnummer beteiligte Achse 1 Register 1x4129 = __ Achsnummer beteiligte Achse 2 Jetter AG...
- Seite 365 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Einzelbewegungen parametrieren *** KKL *** Mastermodul Ein Modul wird zum Mastermodul deklariert. Diese Deklaration ist definieren konfigurationsabhängig, erfordert keinen speziellen Befehl und wird durch *** KKL *** die Benutzung der Masterregister bestimmt. Die Achse 4 des Mastermoduls ist ab sofort die Masterachse für die kombinierte Kreis- und Linearinterpolation.
- Seite 366 Die Geschwindigkeitsanpassung muss also immer dann durchgeführt werden, wenn die Maximalgeschwindigkeiten der beteiligten Achsen und der Datenachse nicht identisch sind. Sind die Werte gleich, muss das Register 1xy051 nicht parametriert werden und die Reset-Einstellung „0“ kann beibehalten werden. Jetter AG...
- Seite 367 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Geber- Ebenso müssen die Geberauflösungen der Slaveachsen an die Datenachse auflösungen angepasst werden. Für die Definitionen zur Datenachse gilt wiederum, dass anpassen in allen Interpolationsarten die Datenachse der Achse 1 des Mastermoduls entspricht; wieder mit der Ausnahme, dass in einer Linearinterpolation der Master-Slave-Konfiguration 3 die Achse 2 des Mastermoduls die Datenachse ist.
- Seite 368 Das Slaveregister 131051 wird mit dem Wert des Registers der Datenachse, also mit dem Wert 3.000 parametriert. GSZSlaveAchse × ------------------------------------------------ - Register1xy052 1.000 GSZDatenAchse 2.500 --------- - × ------------------------- Register131052 1.000 1.024 --------- - Register131052 2.441,41 Das Slaveregister 131052 wird mit dem Wert 2.441 parametriert. Jetter AG...
- Seite 369 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Wartezyklen für Bei Bedarf muss dieses Register der 1. Achse des Mastermoduls für die „Achse 42“ Funktion der fortlaufenden Interpolation programmiert werden. Da während festlegen der Ausführung einer Teilbewegung die nächste Interpolation berechnet wird, kann es zu Zeitproblemen kommen. Dies ist dann der Fall, wenn die zu bearbeitenden Bahnstücke sehr kurz sind.
- Seite 370 Mittelpunkt beteiligte Achse 1 in inc Register 1x4242 = __ Mittelpunkt beteiligte Achse 2 in inc Es ist zu beachten, dass die beiden Differenzen aus den Mittelpunkten und den Startpunkten der Achsen den Wert ±524.207 inc nicht überschreiten. Jetter AG...
- Seite 371 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Sollwinkel Die ebenfalls zwingend notwendige Parametrierung des gewünschten eingeben Sollwinkels, der mit der Kreisbewegung überstrichen werden soll, wird durch *** KKL *** den Eintrag in das entsprechende Register der "Achse 42" realisiert. Register 1x4245 = __ Sollwinkel der Kreisinterpolation (360 Grad entsprechen dem Registerwert 32.768)
- Seite 372 In diesem Fall sind die Achsen 21, 22, 41 und 42 an der Linearinterpolation beteiligt. Der Ausdruck ∆21 gibt die Wegdifferenz zwischen Start- und Sollposition der Achse 21 an. Bei der Berechnung der Gesamtlänge der Diagonalen sind alle beteiligten Achsen einzubeziehen. Jetter AG...
- Seite 373 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Neue Parameter *** KI *** Neuer Startpunkt Zur Berechnung des Startpunktes des nächsten Kreisbogens werden die der nächsten letzten Sollpositionen der beiden beteiligten Achsen benötigt. Sind beide Kreisinterpolation Achsen auf dem Mastermodul platziert, kann das Reglermodul intern auf die *** KI *** Werte zugreifen.
- Seite 374 Nächste Interpolation anhängen Dieser Modus, das Parametrieren von neuen Werten für die nächste Interpolation (nächste Teilbewegung) und Start der Bewegung mit Kommando 24 (also die Programmierschritte h) und i)), wird so lange wiederholt, bis der ganze Kurvenzug abgearbeitet ist. Jetter AG...
- Seite 375 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Register für Die nachfolgend aufgeführten Register (immer die Register der 1. Achse zusätzliche des Mastermoduls) enthalten zusätzliche Informationen zur fortlaufenden Informationen Interpolation. Die Registerinhalte werden intern im Reglermodul berechnet zur fortlaufenden und aktualisiert. Interpolation Register 1x1082 = __ Zähler Bahnstück „Achse 42“...
- Seite 376 Register 1xy000, Bit 13 = 0 ? Wenn das Bit 13 wieder 0 ist, kann man davon ausgehen, dass alle Achsen vom Bus getrennt und definiert angehalten sind. Beispielprogramme zu den einzelnen Varianten befinden sich auf der CD, welche dem Buch beiliegt. Jetter AG...
-
Seite 377: Registerübersicht: Fortlaufende Interpolation
Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation 8.5.5 Registerübersicht: Fortlaufende Interpolation Die Registerübersicht enthält alle für eine fortlaufende Interpolation benutzten Register. Sie können als Register sowohl für die „Achse 42“, für die Masterachse als auch für Slaveachsen benötigt werden. Eine ausführliche Beschreibung befindet sich im nachfolgenden Kapitel. - Seite 378 (Registernummer für „Achse 42“: 1x4234) Sollposition externer Slave 4 (Linearinterpolation) (Registernummer für „Achse 42“: 1x4235) Länge der Softwareachse (Linearinterpolation) (Registernummer für „Achse 42“: 1x4240) Mittelpunkt Achse 1 (Kreisinterpolation) (Registernummer für „Achse 42“: 1x4241) Mittelpunkt Achse 2 (Kreisinterpolation) (Registernummer für „Achse 42“: 1x4242) Jetter AG...
- Seite 379 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Sollwinkel der Kreisinterpolation (Registernummer für „Achse 42“: 1x4245) Zähler Bahnstück „Achse 42“ Füllstand Registerspeicher „Achse 42“ Wartezyklen „Achse 42“ Sollposition 3. Achse Mastermodul (Linearinterpolation) (Registernummer für „Achse 42“: 1x4297) Letzte Sollposition von externer Achse (Kreisinterpolation) (Registernummer für „Achse 42“: 1x4350...
-
Seite 380: Registerbeschreibung: Fortlaufende Interpolation
Radius Schreiben nicht zulässig Wertebereich -524.207 .. +524.207 Wert nach Reset Aus den Parametern der Register 1x4241, 1x4242 und 1x4245 errechnet das Modul JX6-CON-Move(-BP) intern den Radius der Kreisinterpolation, auf den in diesem Register zugegriffen werden kann. Jetter AG... - Seite 381 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Aus den Parametern der Register 1x4241, 1x4242 und 1x4245 errechnet das Modul JX6-CON-Move(-BP) intern den Startwinkel der Kreisinterpolation, auf den in diesem Register zugegriffen werden kann. Berechnete Kreisbogenlänge Register 1x4048 der Kreisinterpolation...
- Seite 382 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Aus den Parametern der Register 1x4241, 1x4242 und 1x4245 errechnet das Modul JX6-CON-Move(-BP) intern die Zielposition der Achse 1, auf die in diesem Register zugegriffen werden kann. Berechnete Zielposition Register 1xy050 Achse 2 (Slave)
- Seite 383 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Die Register 1xy051 und 1xy052 werden in allen Interpolationsarten benötigt. Sie dienen dem grundlegenden Abgleich von Achsen und müssen deshalb auch im Rahmen einer fortlaufenden Interpolation beachtet werden. Anpassung der Register 1xy051: Maximalgeschwindigkeiten an die Datenachse...
- Seite 384 GSZ = Geberauflösung in Register 1xy017 Der Quotient der Geberauflösungen von Slave- und Datenachse beschreibt die Getriebeübersetzung. Das Register 1xy018 beinhaltet die Maximaldrehzahl, die von der Servo-Motor- Kombination erreicht werden kann. Dies ist gleichzeitig der gültige Wert für die Datenachse. Jetter AG...
-
Seite 385: Anpassung Der Geberauflösungen An Die Datenachse
Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Anpassung der Register 1xy052: Geberauflösungen an die Datenachse Funktion Beschreibung Lesen aktueller Wert für die Anpassung der Geberauflösung Schreiben Übergabe eines neuen Wertes für die Anpassung der Geberauflösung Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Die Geberauflösungen der beteiligten Achsen müssen (ähnlich der... - Seite 386 Wertebereich 0, 21, 22, 31, 32 .. 81, 82 Wert nach Reset Dem Master muss mitgeteilt werden, welche Achsen an der Kreisinterpolation beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der zweiten beteiligten Achse eingetragen werden. Jetter AG...
- Seite 387 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Die folgenden Register (1x4132 bis 1x4135) werden gegebenenfalls auch im Rahmen einer fortlaufenden Interpolation benötigt. Dies ist dann der Fall, wenn die Einzelbewegungen auf Linear- oder kombinierten Kreis- und Linearinterpolationen beruhen und dabei externe Slaveachsen benutzt werden. Für die Konfiguration der Einzelbewegungen müssen die beteiligten externen Slaveachsen in den...
- Seite 388 Falls eine Linearinterpolation mit externen Slaveachsen ausgeführt werden soll oder eine kombinierte Kreis- und Linearinterpolation, muss dem Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der vierten beteiligten externen Slaveachse eingetragen werden. Jetter AG...
-
Seite 389: Register Für Fortlaufende Interpolationen
Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Register für fortlaufende Interpolationen: Dieser Teil der Beschreibung umfasst alle Register, die zur Steuerung der fortlaufenden Interpolation dienen. In Abhängigkeit davon, auf welchen Interpolationsarten die Einzelbewegungen basieren, müssen sie parametriert werden. Die Register werden hier als Register der „Achse 42“ mit der entsprechend abweichenden Nummerierung benutzt. - Seite 390 Das Register muss vor dem Start der Funktion parametriert werden, falls diese Achse an der Interpolation beteiligt ist. Die Slaveachse muss zuvor als solche deklariert werden (per Kommando 32 für die jeweils 1. Achse eines Erweiterungsmoduls bzw. mit Kommando 33 für die jeweils 2. Achse des Moduls). Jetter AG...
- Seite 391 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Register 1x4233: Sollposition externer Slave 2 Funktion Beschreibung Lesen Wert der aktuellen Sollposition für den externen Slave 2 Schreiben Übergabe einer neuen Sollposition für externen Slave 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird in einer Linearinterpolation und auch im Rahmen einer kombinierten Kreis- und Linearinterpolation benutzt, um die Sollposition einer externen Slaveachse abzuspeichern.
- Seite 392 Das Register muss vor dem Start der Funktion parametriert werden, falls diese Achse an der Interpolation beteiligt ist. Die Slaveachse muss zuvor als solche deklariert werden (per Kommando 32 für die jeweils 1. Achse eines Erweiterungsmoduls bzw. mit Kommando 33 für die jeweils 2. Achse des Moduls). Jetter AG...
- Seite 393 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Das folgende Register wird benötigt, wenn die fortlaufende Interpolation auf Einzelbewegungen basiert, die als Linearinterpolationen ausgeführt werden. Register 1x4240: Länge der Softwareachse Funktion Beschreibung Lesen aktuelle Länge (vom Reglermodul berechnet) Schreiben neue Länge (vom Anwender vorgegeben) Wertebereich -8.388.608 ..
- Seite 394 Wert nach Reset In dieses Register wird der Mittelpunkt der Achse 1 für die Kreisinterpolation eingetragen. Daneben müssen, als Voraussetzung zur Kreisinterpolation, der Mittelpunkt der Achse 2 (Register 1x4242) und der zu überstreichende Sollwinkel der Interpolation (Register 1x4245) definiert werden. Jetter AG...
- Seite 395 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Register 1x4242 Mittelpunkt Achse 2 Funktion Beschreibung Lesen aktueller Wert für den Mittelpunkt der Achse 2 Schreiben Übergabe eines neuen Wertes für den Mittelpunkt der Achse 2 Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset In dieses Register wird der Mittelpunkt der Achse 2 für die Kreisinterpolation eingetragen.
- Seite 396 Achsen während einer Kreisinterpolation beschreiben. Daneben müssen als Voraussetzung zur Kreisinterpolation in den entsprechenden Registern die Mittelpunkte der Achse 1 (Register 1x4241) und der Achse 2 (Register 1x4242) eingetragen sein. Hinweis! Die Kreisbogenlänge muss kleiner 67.108.000 inc bleiben. Jetter AG...
- Seite 397 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Letzte Sollposition von Register 1x4350 externer Achse Funktion Beschreibung Lesen aktueller Wert der letzten Sollposition von der externen Achse Schreiben Übergabe einer neuen Sollposition von der externen Achse Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register muss die letzte Sollposition der externen Achse enthalten, wenn diese an einer Kreisinterpolation beteiligt ist.
- Seite 398 Vor dem Start sollte der Inhalt dieses Registers gelöscht werden. Nach jeder beendeten Interpolation wird das Register automatisch vom Reglermodul inkrementiert. Wird der Wert des Registers innerhalb des Programms abgefragt und angezeigt, kann man auf diese Weise verfolgen, welches Bahnstück gerade bearbeitet wird. Jetter AG...
- Seite 399 Modul JX6-CON-Move(-BP) 8.5 Fortlaufende Interpolation Füllstand Registerspeicher Register 1x1083 „Achse 42“ Funktion Beschreibung Lesen aktueller Wert des Füllstandes Schreiben nicht zulässig Wertebereich 0 .. +7.499 Wert nach Reset Dieses Register gibt ebenfalls Auskunft über den Bearbeitungsstatus der fortlaufenden Interpolation. Der Registerspeicher ist ein RAM-Speicher, der den Inhalt von 7.500 Registern aufnehmen kann.
-
Seite 400: Kommandoübersicht: Fortlaufende Interpolation
Achse 1 ist Slave (für Linearinterpolation) Achse 2 ist Slave (für Linearinterpolation) Master-Slave-Konfiguration 1 für Linearinterpolation Master-Slave-Konfiguration 2 für Linearinterpolation Master-Slave-Konfiguration 3 für Linearinterpolation Start Interpolation Achse aus Interpolation nehmen Master-Slave-Konfiguration 4 für Linearinterpolation Master-Slave-Konfiguration 5 für Linearinterpolation Jetter AG... -
Seite 401: Spline-Interpolation
Achsen. Die Masterachse dagegen ist eine virtuelle Softwareachse. Das bedeutet, sie ist physikalisch nicht vorhanden. Für die internen Berechnungen zur Ausführung der Interpolation wird in der Software innerhalb des Moduls JX6-CON-Move-(BP) ein virtuelles Abbild aller Achsen geschaffen. Das Ergebnis der Berechnungen spiegelt sich in der Masterachse wieder. -
Seite 402: Ablaufbeschreibung
8 Bahnsteuerungen JetWeb Ablaufbeschreibung min. 20 ms T = Teachpunkt S = Spline-Punkt Abb. 74: Prinzip der Spline-Interpolation Eine Spline-Interpolation mit dem Modul JX6-CON-Move(-BP) wird in folgenden Schritten realisiert: • Dateneingabe • Berechnung der Spline-Bewegung • Ausführen der Spline-Bewegung •... - Seite 403 Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Dateneingabe Folgende Definitionen müssen realisiert werden: • Festlegen der Spline-Nummer in Register 1x1187 Die Nummer des aktuellen Spline, der als nächstes berechnet werden soll, muss hier eingetragen werden. Es können maximal 10 Splines berechnet und gespeichert werden.
-
Seite 404: Berechnung Der Spline-Bewegung
Register 1x1193 hinterlegt, kann dort abgefragt und dann angezeigt werden. Tritt während der Berechnung ein klassifizierter Fehler auf, so wird im Statusregister 1x1195 ein entsprechendes Bit gesetzt. Siehe dazu Kapitel 8.6.6: "Registerbeschreibung: Spline-Interpolation mit 3 Achsen", Seite 417. Jetter AG... -
Seite 405: Ausführen Der Spline-Bewegung
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Ausführen der Spline-Bewegung Das Ausführen der Spline-Bewegung wird in folgenden Schritten realisiert: • Initialisieren der beteiligten Achsen mit Kommando 94 Zwischen den einzelnen Spline-Punkten wird eine Linearinterpolation der Variante 5 (alle 3 konfigurierbaren Achsen eines Moduls sind beteiligt) ausgeführt. -
Seite 406: Optionen Der Spline-Interpolation
Die abgerundeten Ecken werden als Spline berechnet. Die Geraden dazwischen werden jeweils als ein Splinestück betrachtet. Die Anzahl der gewünschten Spline-Punkte wird im Register 1x1193 parametriert. Am Ende der Veränderungen muss die Gesamtlänge des Spline neu berechnet werden. Dies wird über das Kommando 142 realisiert. Jetter AG... -
Seite 407: Allgemeine Voraussetzungen
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Allgemeine Voraussetzungen Für die Funktion einer Spline-Interpolation sind wieder einige wesentliche Punkte generell zu beachten: • Ein sorgfältiger Abgleich der Regler ist die Voraussetzung für das fehlerfreie Funktionieren von Achsbewegungen. Alle Regler (Momenten-, Drehzahl- und Lageregler) müssen nacheinander in der genannten Reihenfolge abgeglichen werden. -
Seite 408: Konfigurationen
8 Bahnsteuerungen JetWeb 8.6.3 Konfigurationen Allgemeine Festlegungen: Die Achsen werden immer über ein Submodul JX6-SB, welches auf einem Reglermodul JX6-CON-Move(-BP) platziert ist, definiert. Gehäuse Steckplatz 1 JX6-CON- Move (-BP) Submodul 3 = leer Submodul 2 = leer Submodul 1 = JX6-SB... - Seite 409 Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation An einer Spline-Interpolation sind 3 Achsen beteiligt. Die Softwareachse, die virtuelle Achse 4 eines Moduls, ist die Masterachse der gesamten Interpolation. Diese Softwareachse bestimmt die Parametrierung der koordinierten Bewegungen. Alle beteiligten physikalischen Achsen werden als Slaves betrachtet.
-
Seite 410: Abb. 76: Aufbau Zur Spline-Interpolation Variante 1
Master-Modul => Softwareachse 4 = Masterachse Abb. 76: Aufbau zur Spline-Interpolation Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move oder ein Modul JX6-CON-Move-BP gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21, 22 und 23 konfiguriert werden. -
Seite 411: Programmier-Hinweise
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation 8.6.4 Programmier-Hinweise Der erste Teil dieser Programmierhinweise bezieht sich auf die Dateneingabe und die Berechnung des Spline. Achtung: Für diese Aufgaben werden ausschließlich die Register der physikalischen Achse 1 benutzt. Spline-Nummer In diesem Register wird definiert, welche Spline-Nummer berechnet werden definieren soll. - Seite 412 Anzahl der berechneten Spline-Punkte Tritt bei der Berechnung ein klassifizierter Fehler auf, so wird im Statusregister der Spline-Berechnung (1x1195) ein entsprechendes Bit gesetzt. Siehe Registerbeschreibung für die Zuordnung der Bits und der Fehler. Register 1x1195 = __ Statusregister Spline-Berechnung Jetter AG...
- Seite 413 Mastermodul, • die Softwareachse 4 dieses Moduls ist die Masterachse der Interpolation, • alle 3 Achsen eines Moduls JX6-CON-Move(-BP) sind an der Interpolation beteiligt und sie müssen nicht explizit als Slaves definiert werden, • es gibt keine externen Slaves.
- Seite 414 Register 1xy000, Bit 13 = 0 ? Wenn das Bit 13 wieder 0 ist, kann man davon ausgehen, dass alle Achsen vom Bus getrennt und definiert angehalten sind. Ein Beispielprogramm befindet sich auf der CD, welche dem Buch beiliegt. Jetter AG...
-
Seite 415: Registerübersicht: Spline-Interpolation Mit 3 Achsen
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation 8.6.5 Registerübersicht: Spline-Interpolation mit 3 Achsen Die Registerübersicht enthält alle für eine Spline-Interpolation mit 3 Achsen benutzten Register. Sie können als Register sowohl für die Masterachse als auch für Slaveachsen benötigt werden. Eine ausführliche Beschreibung befindet sich im nachfolgenden Kapitel. - Seite 416 8 Bahnsteuerungen JetWeb Zeiger auf Teach- oder Spline-Koordinate Anzahl der berechneten Spline-Punkte Grenzgeschwindigkeit für die Spline-Interpolation Statusregister Spline-Berechnung Berechnung mit/ohne Korrektur X-Koordinate Teachpunkt Y-Koordinate Teachpunkt Z-Koordinate Teachpunkt Maximale Anzahl Teachpunkte Maximale Anzahl Spline-Punkte Jetter AG...
-
Seite 417: Registerbeschreibung: Spline-Interpolation Mit 3 Achsen
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation 8.6.6 Registerbeschreibung: Spline-Interpolation mit 3 Achsen Register 1x1187 Spline-Nummer Funktion Beschreibung Lesen aktuelle Spline-Nummer Schreiben Übergabe eines neuen Wertes für die Spline- Nummer Wertebereich 1 .. 10 Wert nach Reset In der Steuerung können maximal 10 Splines berechnet und gespeichert werden. - Seite 418 Funktion Beschreibung Lesen aktueller Wert der Z-Koordinate des Spline- Punktes Schreiben Übergabe eines neuen Wertes für die Z-Koordinate des Spline-Punktes Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Nach der Berechnung enthält dieses Register die Z-Koordinate des jeweiligen Spline-Punktes. Jetter AG...
-
Seite 419: Zuordnung Teachpunkt
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Register 1x1191 Zuordnung Teachpunkt Funktion Beschreibung Lesen aktueller Wert der Z-Koordinate Schreiben Teachpunkt zur Spline-Koordinate zuordnen Wertebereich 0 .. 500 Wert nach Reset Während des Ablaufes der Spline-Interpolation kann hier das Erreichen eines Teachpunktes abgefragt werden. -
Seite 420: Anzahl Der Berechneten Spline-Punkte
Da zwei aufeinanderfolgende Spline-Punkte einen zeitlichen Abstand von mindestens 20 ms haben müssen, ergibt sich in Bezug auf die Grenzgeschwindigkeit folgender Zusammenhang: • bei kleiner Grenzgeschwindigkeit ergeben sich mehr Spline-Punkte, • bei großer Grenzgeschwindigkeit ergeben sich weniger Spline-Punkte. Jetter AG... -
Seite 421: Statusregister Spline-Berechnung
Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Statusregister Register 1x1195 Spline-Berechnung Funktion Beschreibung Lesen aktueller Status der Spline-Berechnung Schreiben nicht zulässig Wertebereich bitcodiert, Bit 0 .. 23 Bit Wert nach Reset In diesem Register wird ein Bit gesetzt, wenn ein Fehler bei der Spline-Berechnung aufgetreten ist. -
Seite 422: Berechnung Mit/Ohne Korrektur
Die automatische Korrektur ist eingeschaltet. Werden bei der Berechnung der einzelnen Spline-Stücke zwei aufeinanderfolgende Spline-Punkte entdeckt, die einen zeitlichen Abstand von weniger als 18 ms haben, so werden diese Punkte automatisch korrigiert. Grund: der zeitliche Mindestabstand zwischen 2 Spline-Punkten beträgt 20 ms. Jetter AG... - Seite 423 Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Register 1x1204 X-Koordinate Teachpunkt Funktion Beschreibung Lesen aktueller Wert der X-Koordinate des Teachpunktes Schreiben Übergabe eines neuen Wertes für die X-Koordinate des Teachpunktes Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset Dieses Register wird zur Berechnung der Spline-Interpolation benutzt. Es wird hier die X-Koordinate des jeweils aktuellen Teachpunktes definiert.
- Seite 424 Berechnung der Spline-Interpolation verwendet werden sollen. Mit dem Beschreiben des Registers wird gleichzeitig ein entsprechend großer Speicherplatzbereich für die Berechnung reserviert. Aus diesem Grund muss das Register 1x1240 parametriert werden, bevor die Teachpunktkoordinaten in die entsprechenden Register eingetragen werden. Jetter AG...
- Seite 425 Modul JX6-CON-Move(-BP) 8.6 Spline-Interpolation Register 1x1241 Maximale Anzahl Spline-Punkte Funktion Beschreibung Lesen aktuelle maximale Anzahl der Spline-Punkte, die zur Berechnung verwendet werden sollen Schreiben Übergabe eines neuen Maximalwertes für die Anzahl der Spline-Punkte Wertebereich 3 .. 3.000 Wert nach Reset In diesem Register wird die maximale Anzahl der Spline-Punkte definiert, die zur Berechnung der Spline-Interpolation verwendet werden dürfen.
-
Seite 426: Kommandoübersicht: Spline-Interpolation Mit 3 Achsen
Ein Kommando ist aktiv, bis ein gegenteiliges Kommando gegeben wird. Kommandos: Kommando-Nr. Spline-Interpolation mit 3 Achsen Start Interpolation Achse aus Interpolation nehmen Master-Slave-Konfiguration 5 für Linearinterpolation Spline-Interpolation: Starten einer Spline- Berechnung Spline-Interpolation: Starten einer Spline-Bewegung Spline-Interpolation: Neuberechnung der Spline- Länge Jetter AG... -
Seite 427: Nachlaufregler
Bewegung Slaveachse 2 Bewegung Slaveachse x Abb. 77: Prinzip einer Nachlaufregelung Nachlaufregelungen mit JX6-CON-Move(-BP) Mit Hilfe der Module JX6-CON-Move(-BP) und JetMove2xx können Nachlaufregelungen realisiert werden. Folgende grundsätzliche Betriebsarten des Nachlaufreglers sind möglich: • der Nachlaufregler als elektrisches Getriebe (mit statischem Übersetzungsverhältnis),... - Seite 428 "Referenzfahrten", Seite 76). • Wird eine Achse in der Nachlaufreglerfunktion als Slave betrieben und wird dieser Achse ein Positionierbefehl (POS [Achse=<Achs-Nummer>, Pos=<Sollposition>, v=<Sollgeschwindigkeit>]) gegeben, dann fährt die Slaveachse auf die angegebene Position und verlässt dabei gleichzeitig den Modus der Nachlaufregelung. Jetter AG...
-
Seite 429: Nlr Mit Statischem Übersetzungsverhältnis
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis NLR mit statischem Übersetzungsverhältnis 9.1.1 Überblick In dieser Betriebsart des Nachlaufreglers folgen die Slaves dem Master entweder im Verhältnis 1:1 oder mit einem anderen definierten Übersetzungsverhältnis. Dazu wird die Istposition des Masters, bevor sie vom Slave als Sollposition verwendet wird, über das Übersetzungsverhältnis umgerechnet. - Seite 430 Hardwarekonfiguration unterscheiden. Daneben gibt es die Möglichkeit, die Achsen auch im Modus "Endlospositionierung" zu betreiben. Darauf wird im Kapitel 9.1.4: "NLR (E-Getriebe) im Endlosbetrieb", Seite 446, näher eingegangen. Die folgende Kurzübersicht zeigt die Varianten des Nachlaufreglers mit statischem Übersetzungsverhältnis sowie die verwendeten Register und Kommandos. Jetter AG...
-
Seite 431: Abb. 79: Übersicht: Nachlaufregler Als Elektrisches Getriebe
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Master und Slave Verwendete Verwendete auf einem Reglermodul Register Kommandos ÜV - EIN 1xy052 Anpassung JX6-CON- Geberauflösung ÜV - AUS Move(-BP) 1xy056 Faktor des ÜV JX6-SB Achse 3 ist 1xy057 Divisor des ÜV... -
Seite 432: Konfigurationen
9 Nachlaufregler JetWeb 9.1.2 Konfigurationen Allgemeine Festlegungen: Die Achsen werden immer über ein Submodul JX6-SB, welches auf einem Reglermodul JX6-CON-Move(-BP) platziert ist, definiert. Gehäuse Steckplatz 1 JX6-CON- Move (-BP) Submodul 3 = leer Submodul 2 = leer Submodul 1 = JX6-SB... - Seite 433 Achsen verwendet. Hinweis! Für die Ausführung der Funktion "Nachlaufregler" gilt beim Hardwareaufbau: Es sind sowohl Reglermodule des Typs JX6-CON-Move als auch des Typs JX6-CON-Move-BP zugelassen. Die Verwendung von Reglermodulen JX6-CON-Move-BP ist zwingend erforderlich, wenn sich Master und Slave auf verschiedenen Reglermodulen befinden (Busbetrieb).
-
Seite 434: Mögliche Achskonfigurationen
Bustrennung zwischen Steckplatz 4 und 5 beachtet werden. Das bedeutet, man kann die Reglermodule auf den Steckplätzen 2 bis 4 für eine Interpolation und die Module auf den Steckplätzen 5 bis 8 für eine andere Interpolation verwenden. Kombinationen über die Bustrennung hinweg sind nicht zulässig! Jetter AG... - Seite 435 Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Es gibt die Möglichkeit, die Achse 3, nur bestehend aus einem Inkremental- oder Absolutwertgeber, als Master in der Nachlaufregelung mit statischem Übersetzungsverhältnis zu benutzen. Auf diesen Sonderfall wird im Kapitel : "NLR (E-Getriebe) Konfigurationen Variante 4", Seite 440, näher eingegangen.
-
Seite 436: Abb. 81: Aufbau Zum Nachlaufregler Variante 1
Mastermodul Abb. 81: Aufbau zum Nachlaufregler Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move oder ein Modul JX6-CON-Move(-BP) gesteckt. Als Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21 und 22 konfiguriert werden. -
Seite 437: Abb. 82: Aufbau Zum Nachlaufregler Variante 2
21, 22, 23 Mastermodul Abb. 82: Aufbau zum Nachlaufregler Variante 2 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move(-BP) gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21, 22 und 23 konfiguriert werden. -
Seite 438: Abb. 83: Aufbau Zum Nachlaufregler Variante 3
Achsen 71, 72 Mastermodul Abb. 83: Aufbau zum Nachlaufregler Variante 3 Die Steckplätze 5 bis 7 beinhalten die Reglermodule JX6-CON-Move-BP, deren Submodule 1 (Module JX6-SB) die an der Bewegungskoordination beteiligten Achsen definieren. Die logischen Achsnummern stehen in obiger Abbildung unter der Submodulbezeichnung 1 (JX6-SB). - Seite 439 9.1 NLR mit statischem Übersetzungsverhältnis Bei der Nutzung eines 8-Steckplatz-Gehäuses können auch andere Steckplätze für die Module JX6-CON-Move-BP gewählt werden. Es muss dann aber die hardwaremäßige Bustrennung zwischen den Erweiterungsmodulsteckplätzen 4 und 5 beachtet werden. Das bedeutet: alle für die Nachlaufreglerfunktion genutzten Module müssen sich entweder auf den Steckplätzen 2 bis 4 oder 5 bis 8 befinden.
-
Seite 440: Abb. 84: Aufbau Zum Nachlaufregler Variante
Achse 21 Abb. 84: Aufbau zum Nachlaufregler Variante 4 Auf Steckplatz 2 ist ein Reglermodul JX6-CON-Move(-BP) gesteckt. Das Submodul 1 ist ein Modul JX6-SB, auf dem die Achse 21 definiert ist. Diese Achse 21 ist im dargestellten Beispiel als interner Slave für die Nachlaufreglerfunktion vorgesehen. - Seite 441 Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Für die Variante 4 ergeben sich folgende Konfigurationsmöglichkeiten: Masterachse Kombinierbare Slaveachsen Hinweis 21, 22, 31, 32, 41, 42 jeweils alle 6 Achsen oder auch nur Einzelne davon sind 21, 22, 31, 32, 41, 42...
-
Seite 442: Programmier-Hinweise
Dies gilt für alle beteiligten Slaveachsen, auf die der Sachverhalt zutrifft. Übersetzungs- Für jeden Slave kann das Nachlaufverhalten speziell vorgegeben werden. verhältnis Dazu wird das gewünschte Übersetzungsverhältnis in den entsprechenden festlegen Slaveregistern hinterlegt. Es wird nach folgender Formel berechnet: Faktor × SollpositionSlave IstpositionMaster ------------------- - Offset Divisor Jetter AG... - Seite 443 Slaves in der Nachlaufregelung. Dies gilt für alle Konfigurationsvarianten, in denen eine Achse 1 oder eine Achse 2 der Master ist. Achtung: Sind auf einem Reglermodul JX6-CON-Move-BP die beiden ersten physikalischen Achsen Slaves eines externen Masters, so darf vom Master aus nur an die erste Achse gesendet werden.
- Seite 444 Sollen alle, bis dahin an der koordinierten Bewegung beteiligten, Achsen nehmen wieder unabhängig voneinander betrieben werden, so ist jeder einzelnen physikalischen Achse das Kommando 42 zu erteilen. Gleichzeitig wird dabei ein HALTACHSE-Befehl ausgeführt. Register 1xy001 = 42 Ende der Nachlaufreglerfunktion Jetter AG...
- Seite 445 Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Quittierung des Für einen definierten Abschlusszustand der Nachlaufreglerfunktion sollte die Kommandos 42 erfolgreiche Ausführung des Kommandos 42 überprüft werden. Dazu wird das Bit 13 (BUSY) des Statusregisters jeder beteiligten Achse (Master und Slave(s)) abgefragt.
-
Seite 446: Nlr (E-Getriebe) Im Endlosbetrieb
Die Problematik bei der Verknüpfung von Endlospositionierung und Nachlaufregler liegt in der Behandlung der Maximal- und Überlaufpositionen. Hinweis! Die Endlospositionierung des Masters kann nur in positive Richtung durchgeführt werden. Die Endlospositionierung in negative Richtung oder ein Richtungswechsel innerhalb des Gesamtablaufes ist nicht zulässig. Jetter AG... -
Seite 447: Abb. 85: Nachlaufregler (E-Getriebe) Und Endlosbetrieb
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Die Endlospositionierung läuft nach folgendem Prinzip ab: Position (in inc) 200.000 150.000 100.000 50.000 25.000 Zeit t Positionierzyklus 1 Positionierzyklus 3 Positionierzyklus 2 Master Master Master Slave Slave Slave Abb. 85: Nachlaufregler (E-Getriebe) und Endlosbetrieb Der Slave folgt dem Master in einem Übersetzungsverhältnis von 1:1. -
Seite 448: Abb. 86: Beispielkonfiguration Zum Nlr Im Endlosbetrieb
Zur Erklärung des Ablaufs wird die Achskonfiguration der Variante 1 angenommen: Gehäuse Steckplatz 1 JX6-CON- Move(-BP) Submodul 3 (leer/AD8/ DA4/SV) Submodul 2 (zwingend leer) Submodul 1 (JX6-SB) Achsen 21, 22 Achse 22 = Slave Achse 21 = Master Abb. 86: Beispielkonfiguration zum NLR im Endlosbetrieb Jetter AG... -
Seite 449: Programmier-Hinweise Für Den Endlosbetrieb
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Programmier-Hinweise für den Endlosbetrieb: Die folgenden Programmhinweise konzentrieren sich auf die Funktion des Endlosbetriebs. Die im Kapitel 9.1.3: "Programmier-Hinweise", Seite 442 ff, erwähnten Festlegungen sind zu beachten. Absolute Für die Kombination von Endlosbetrieb und Nachlaufreglerfunktion muss für Maximalposition den Master eine absolute Maximalposition definiert werden. - Seite 450 HALTACHSE mit Stopprampe Kommando 45 Mit Kommando 45 an die Slaveachse wird die Nachlaufreglerfunktion beendet (elektrisches Getriebe) wieder ausgeschaltet. NLR-Funktion Register 122001 = 45 Nachlaufregler über Faktor/Divisor - AUS Ein Beispielprogramm befindet sich auf der CD, welche dem Buch beiliegt. Jetter AG...
-
Seite 451: Registerübersicht:nachlaufregler (E-Getriebe)
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis 9.1.5 Registerübersicht: Nachlaufregler (E-Getriebe) Die Registerübersicht enthält alle für die Funktion "Nachlaufregler mit statischem Übersetzungsverhältnis" benutzten Register. Sie können als Register sowohl für die Masterachse als auch für Slaveachsen benötigt werden. Eine ausführliche Beschreibung befindet sich im nachfolgenden Kapitel. - Seite 452 JetWeb Masteroffset 2096 Überlaufposition des Masters im Slave 4132 Achsnummer: Externer Slave 1 4133 Achsnummer: Externer Slave 2 4134 Achsnummer: Externer Slave 3 4135 Achsnummer: Externer Slave 4 4136 Achsnummer: Externer Slave 5 4137 Achsnummer: Externer Slave 6 Jetter AG...
-
Seite 453: Registerbeschreibung: Nachlaufregler (E-Getriebe)
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis 9.1.6 Registerbeschreibung: Nachlaufregler (E-Getriebe) Anpassung der Register 1xy052: Geberauflösungen an die Datenachse Funktion Beschreibung Lesen aktueller Wert für die Anpassung der Geberauflösung Schreiben Übergabe eines neuen Wertes für die Anpassung der Geberauflösung Wertebereich -8.388.608 .. -
Seite 454: Faktor Des Übersetzungs
Der Registerinhalt kann während des Positionierens geändert werden. Der dabei im Slave zwangsläufig auftretende "Sprung" kann abgefangen werden. Hinweis! Das Produkt aus dem Faktor des Übersetzungsverhältnisses und der Maximalposition des Masters darf den Wert 2 -1 nicht überschreiten. Jetter AG... -
Seite 455: Divisor Des Übersetzungs
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Divisor des Übersetzungs- Register 1xy057: verhältnisses zwischen Master und Slave Funktion Beschreibung Lesen Wert des aktuellen Divisors Schreiben Übergabe eines neuen Wertes für den Divisor Wertebereich 1 .. +8.388.607 Wert nach Reset Dieses Register wird in der Nachlaufreglerfunktion als Slaveregister benutzt, um den Divisor des Übersetzungsverhältnisses zu definieren, mit welchem der Slave dem... -
Seite 456: Positive Maximalposition Des Masters Im Slave
Es gibt die maximal mögliche Position der Masterachse in positiver Richtung an und wird zum definierten Rücksetzen des Slaves verwendet. Sobald der Master die in Register 1xy058 hinterlegte Position erreicht hat, wird das Rücksetzen ausgelöst und Ist- und Sollposition des Slaves werden auf Null gesetzt. Jetter AG... -
Seite 457: Istposition Der Masterachse
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Register 1xy085: Absolute Maximalposition Funktion Beschreibung Lesen Wert der absoluten Maximalposition Schreiben Übergabe einer neuen Maximalposition Wertebereich 0 .. +7.490.000 Wert nach Reset 7.490.000 In der Nachlaufreglerfunktion im Endlosbetrieb wird dieses Register als Masterregister benutzt. -
Seite 458: Positions-Offset, Mit Welchem Der Slave Dem Master Folgt
Positionsdifferenz zwischen den Startpositionen von Master und Slave stellt den Offset dar. Das Übersetzungsverhältnis berechnet sich nach folgender Formel: Faktor × SollpositionSlave IstpositionMaster ------------------- - Offset Divisor Die Istposition des Masters steht im Register 1xy095. Der Faktor wird im Register 1xy056 definiert, der Divisor im Register 1xy057. Jetter AG... - Seite 459 Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Register 1xy248: Masteroffset Funktion Beschreibung Lesen Aktueller Wert für den Masteroffset Schreiben Übergabe eines neuen Wertes für den Masteroffset Wertebereich -<Reg. 1xy055> ... +<Reg. 1xy055> Wert nach Reset Dieses Register wird in der Nachlaufreglerfunktion (Tabellenmodus) als Slaveregister benutzt.
-
Seite 460: Überlaufposition Des Masters Im Slave
Wenn einer dieser 3 Fälle eintritt, dann muss den externen Slaves mitgeteilt werden, um welchen Wert der Master zurückgesetzt wurde. Deshalb wird dieser Wert in das Register 1x2096 des Moduls eingetragen, auf dem sich die externen Slaves befinden. Dabei wird immer das Slaveregister für die Achse 2 benutzt (1x2096). Jetter AG... - Seite 461 Achse der über ein Modul JX6-SB definierten Achsen sein. Beispiel: Angenommen auf dem Reglermodul JX6-CON-Move-BP auf Steckplatz 3 sind die Achsen 31 und 32 als externe Slaves in die Nachlaufreglerfunktion zu integrieren. Dann wird im Masterregister 1x4132 eine 31 eingetragen, und damit sind beide Slaves (Achse 31 und Achse 32) als solche definiert.
- Seite 462 Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der dritten beteiligten externen Slaveachse eingetragen werden, die sich auf einem anderen Erweiterungsmodul befindet als die zuvor parametrierten Slaves. Jetter AG...
- Seite 463 Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis Register 1x4135: Achsnummer: Externer Slave 4 Funktion Beschreibung Lesen aktuelle Achsnummer der vierten beteiligten externen Slaveachse Schreiben Definition einer neuen vierten beteiligten externen Slaveachse (Eingabe der Achsnummer) Wertebereich 0, 21, 22, 31, 32 .. 81, 82 Wert nach Reset Falls die Nachlaufreglerfunktion mit externen Slaveachsen ausgeführt werden soll,...
- Seite 464 Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der sechsten beteiligten externen Slaveachse eingetragen werden, die sich auf einem anderen Erweiterungsmodul befindet als die zuvor parametrierten Slaves. Jetter AG...
-
Seite 465: Kommandoübersicht: Nachlaufregler (E-Getriebe)
Modul JX6-CON-Move(-BP) 9.1 NLR mit statischem Übersetzungsverhältnis 9.1.7 Kommandoübersicht: Nachlaufregler (E-Getriebe) Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für die Funktion "Nachlaufregler mit statischem Übersetzungsverhältnis" benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der betreffenden Master- oder Slaveachse geschrieben. -
Seite 466: Nlr Mit Dynamischem Übersetzungsverhältnis
Tabelle die Basis für das Verfahren der Slaveachse. Innerhalb dieser Betriebsart gibt es wieder verschiedene Varianten, die sich durch die Hardwarekonfigurationen unterscheiden: • Master und Slave befinden sich auf einem Reglermodul JX6-CON-Move(-BP), • Master und Slave sind auf unterschiedlichen Reglermodulen platziert, •... -
Seite 467: Abb. 88: Zeitgesteuerte Tabellenverarbeitung
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Zeitsteuerung bestimmt Tabellenelement Tabelle im Slave JX6-CON- Move(-BP) SollPos JX6-SB SollPos SollPos Slave Slave SollPos SollPos … … … SollPos Sollposition für Slave aus der Tabelle Abb. 88: Zeitgesteuerte Tabellenverarbeitung Die zuvor dargestellten Varianten werden in den Folgekapiteln noch ausführlicher beschrieben. -
Seite 468: Abb. 89: Übersicht: Nachlaufregler Im Tabellenmodus
(unabhängig von der Hardware-Anordnung) Nachlaufregler im 1xy085 Absolute Korrektur Überlauf Maximalposition Slave - AUS Endlosbetrieb 1x2096 Überlaufposition 55 Korrektur Überlauf (unabhängig von der des Masters Slave - EIN Hardware-Anordnung) 56 Endlospos. in pos. Richtung Abb. 89: Übersicht: Nachlaufregler im Tabellenmodus Jetter AG... -
Seite 469: Aufbau Und Handhabung Der Tabelle
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis 9.2.2 Aufbau und Handhabung der Tabelle Allgemeines Für die korrekte Funktion des Nachlaufreglers im Tabellenmodus muss die Tabelle stets gleich aufgebaut sein. Deshalb wurde Folgendes definiert: Wert des Tabellen- Elementes (= Sollposition Slave) -
Seite 470: Abb. 91: Zuordnung: Tabellen Und Slaves
Register 1xy147) muss vom Anwender im Programm vorgenommen werden. Die Auswahl der aktuellen Tabelle für das Abfahren wird über das Register 1xy260 vorgenommen. Somit kann zum Beispiel eine Tabelle bereits abgefahren und eine weitere Tabelle gleichzeitig eingetragen werden. Jetter AG... -
Seite 471: Erstellen Der Tabelle
Da bei jedem Ausschalten der Logikspannung der Inhalt der Tabelle verloren geht, muss die Tabelle vor dem 1. Start des Tabellenmodus im jeweiligen Modul JX6-CON-Move(-BP) initialisiert werden. Dazu kann je nach Anwendung die komplette Tabelle: – im Arbeitsspeicher abgelegt werden, –... -
Seite 472: Abfahrt Eines Nachlaufreglers Im Tabellenmodus
Die Masterposition im Slave steht im Register 1xy095. Die Anzahl Tabellenelemente sind im Register 1xy055 und die positive Maximalposition des Masters in Register 1xy058 definiert. Anhand der eingetragenen Tabelle und der zusätzlichen Geradeninterpolation wird zum Schluß ein Positionssollwert für die Slaveachse erzeugt. Jetter AG... -
Seite 473: Handhabung Der Überlaufproblematik Im Endlosbetrieb
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Handhabung der Überlaufproblematik im Endlosbetrieb Um auf einen Überlauf des Masterpositionsregisters reagieren zu können, gibt es zwei Kommandos: Kommando 54 NLR: Überlauf Slave nicht korrigieren Funktions- Beim Überlauf des Masters erfolgt keine Korrektur des beschreibung Slaves. -
Seite 474: Abb. 93: Unterschiedliche Werte Für Tabellenanfang Und Tabellenende
Beide Elemente geben als Sollposition für den Slave jeweils 0 vor. In diesem Fall (Idealfall) ist es unerheblich, ob mit Kommando 54 oder 55 gearbeitet wird. Position Slave 30.000 Tabellen- element 3.140 Abb. 94: Identische Werte für Tabellenanfang und Tabellenende Jetter AG... -
Seite 475: Konfigurationen
Konfigurationen Allgemeine Festlegungen: Für den Nachlaufregler im Tabellenmodus gelten ähnliche Voraussetzungen wie für den Nachlaufregler als elektrisches Getriebe. Die Achsen werden immer über ein Submodul JX6-SB, welches auf einem Reglermodul JX6-CON-Move(-BP) platziert ist, definiert. Gehäuse Steckplatz 1 JX6-CON- Move (-BP) - Seite 476 Achsen verwendet. Hinweis! Für die Ausführung der Funktion "Nachlaufregler" gilt beim Hardwareaufbau: Es sind sowohl Reglermodule des Typs JX6-CON-Move als auch des Typs JX6-CON-Move-BP zugelassen. Die Verwendung von Reglermodulen JX6-CON-Move-BP ist zwingend erforderlich, wenn sich Master und Slave auf verschiedenen Reglermodulen befinden (Busbetrieb).
- Seite 477 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Mögliche Achskonfigurationen: Es gibt wieder verschiedene Varianten, um Achsen in einer Nachlaufregelung mit dynamischem Übersetzungsverhältnis zu kombinieren: Nur die physikalischen Achsen 1 und 2 eines Mastermoduls sind beteiligt. Alle 3 Achsen eines Mastermoduls sind beteiligt.
- Seite 478 Achse wird in fest definierten Registern abgebildet, es ist keine Hardware erforderlich. Auf diesen Sonderfall wird im Kapitel : "NLR (Tabellenmodus) Konfigurationen Variante 5", Seite 485, näher eingegangen. Werden mehr als 3 Achsen in den Nachlaufregler integriert, empfiehlt es sich, als Master auch eine geregelte Achse zu definieren. Jetter AG...
-
Seite 479: Abb. 96: Aufbau Zum Nachlaufregler Variante 1
Mastermodul Abb. 96: Aufbau zum Nachlaufregler Variante 1 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move oder ein Modul JX6-CON-Move-BP gesteckt. Als Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21 und 22 konfiguriert werden. Die Achse 21 ist als Master und die Achse 22 ist als interner Slave für die Nachlaufreglerfunktion vorgesehen. -
Seite 480: Abb. 97: Aufbau Zum Nachlaufregler Variante 2
21, 22, 23 Mastermodul Abb. 97: Aufbau zum Nachlaufregler Variante 2 Auf dem Steckplatz 2 des Gehäuses ist ein Modul JX6-CON-Move(-BP) gesteckt. AIs Submodul 1 ist ein Modul JX6-SB integriert, über welches die Achsen 21, 22 und 23 konfiguriert werden. -
Seite 481: Abb. 98: Aufbau Zum Nachlaufregler Variante 3
Achsen 71, 72 Mastermodul Abb. 98: Aufbau zum Nachlaufregler Variante 3 Die Steckplätze 5 bis 7 beinhalten die Reglermodule JX6-CON-Move-BP, deren Submodule 1 (Module JX6-SB) die an der Bewegungskoordination beteiligten Achsen definieren. Die logischen Achsnummern stehen in obiger Abbildung unter der Submodulbezeichnung 1 (JX6-SB). - Seite 482 9 Nachlaufregler JetWeb Bei der Nutzung eines 8-Steckplatz-Gehäuses können auch andere Steckplätze für die Module JX6-CON-Move-BP gewählt werden. Es muss dann aber die hardwaremäßige Bustrennung zwischen den Erweiterungsmodulsteckplätzen 4 und 5 beachtet werden. Das bedeutet: alle für die Nachlaufreglerfunktion genutzten Module müssen sich entweder auf den Steckplätzen 2 bis 4 oder 5 bis 8 befinden.
-
Seite 483: Abb. 99: Aufbau Zum Nachlaufregler Variante
Achse 21 Abb. 99: Aufbau zum Nachlaufregler Variante 4 Auf Steckplatz 2 ist ein Reglermodul JX6-CON-Move(-BP) gesteckt. Das Submodul 1 ist ein Modul JX6-SB, auf dem die Achse 21 definiert ist. Diese Achse 21 ist im dargestellten Beispiel als interner Slave für die Nachlaufreglerfunktion vorgesehen. - Seite 484 51, 52, 61, 62, 71, 72, 81, 82 auch nur Einzelne davon sind zur Masterachse 51, 52, 61, 62, 71, 72, 81, 82 kombinierbar 51, 52, 61, 62, 71, 72, 81, 82 Kombinationen über die Bustrennung hinweg sind nicht zulässig! Jetter AG...
-
Seite 485: Abb. 100: Aufbau Zum Nachlaufregler Variante 5
Achse 21 Abb. 100: Aufbau zum Nachlaufregler Variante 5 Auf Steckplatz 2 ist ein Reglermodul JX6-CON-Move-(BP) gesteckt. Das Submodul 1 ist ein Modul JX6-SB, auf dem die Achse 21 definiert ist. Diese Achse 21 ist im dargestellten Beispiel als interner Slave für die Nachlaufreglerfunktion vorgesehen. - Seite 486 51, 52, 61, 62, 71, 72, 81, 82 auch nur Einzelne davon sind zur Masterachse 51, 52, 61, 62, 71, 72, 81, 82 kombinierbar 51, 52, 61, 62, 71, 72, 81, 82 Kombinationen über die Bustrennung hinweg sind nicht zulässig! Jetter AG...
-
Seite 487: Programmier-Hinweise
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis 9.2.4 Programmier-Hinweise Lageregelung auf Die grundlegenden Definitionen für Achsen müssen bei der Verwendung Modus 2 einer virtuellen Masterachse realisiert werden. Das bedeutet, alle relevanten einstellen Register müssen genau wie bei einer realen Achse parametriert werden. - Seite 488 Im jeweiligen Slaveregister 1xy058 wird die positive Maximalposition des Maximalposition Masters hinterlegt. Es wird hier eine Masterposition definiert, die speziell für des Masters im diesen einen Slave den Grenzwert zum Rücksetzen der Position bestimmt. Slave hinterlegen Register 1xy058 = __ Positive Maximalposition des Masters im Slave Jetter AG...
- Seite 489 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Externe Slaves Dem Master muss mitgeteilt werden, welche externen Slaveachsen an der im Master Nachlaufregelung beteiligt sind. Dafür erfolgt in den entsprechenden registrieren Masterregistern der Eintrag der logischen Achsnummern der Slaves. Hierbei ist zu beachten, dass nur die jeweils erste Achse eines Reglermoduls in das Masterregister eingetragen wird.
- Seite 490 Mit Kommando 93 wird die Funktion, welche die Achse 3 zur Masterachse in deaktiviert die der Nachlaufreglerfunktion bestimmt hat, wieder deaktiviert. Diese Master-Definition Einstellung ist zugleich die Default-Einstellung. der Achse 3 Register 1xy001 = 93 Achse 3 ist Master im Nachlaufregler - AUS Jetter AG...
- Seite 491 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Kommando 126 Mit Kommando 126 wird die Funktion der virtuellen Achse wieder deaktiviert. deaktiviert Modus Diese Einstellung ist zugleich die Default-Einstellung. "Virtuelle Achse" Register 1xy001 = 126 Virtuelle Achse - AUS Kommando 91 Die Funktion der Achse 3 wird mit diesem Kommando wieder deaktiviert.
-
Seite 492: Nlr (Tabellenmodus) Im Endlosbetrieb
Die Funktion "Nachlaufregler" wird für Master und Slave gleichzeitig gestartet und der Slave folgt dem Master unverzüglich. Der relativ große zeitliche Versatz zwischen Master- und Slaveachse hat darstellerische Gründe. Die Verzögerungszeit zwischen Master und Slave ist gering und ergibt sich im Wesentlichen aus den Signal-Laufzeiten. Jetter AG... - Seite 493 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Für den Master gilt: • Die fortlaufende Positionierung wird so lange kontinuierlich durchgeführt, bis die Masterachse mit einem Kommando oder einem Programmierbefehl gestoppt wird. • Ein Positionierzyklus kann aus mehreren Einzelpositionierungen bestehen. •...
-
Seite 494: Abb. 102:Beispielkonfiguration Zum Nlr Im Endlosbetrieb
Zur Erklärung des Ablaufs wird wieder die Achskonfiguration der Variante 1 angenommen: Gehäuse Steckplatz 1 JX6-CON- Move(-BP) Submodul 3 (leer/AD8/ DA4/SV) Submodul 2 (zwingend leer) Submodul 1 (JX6-SB) Achsen 21, 22 Achse 22 = Slave Achse 21 = Master Abb. 102: Beispielkonfiguration zum NLR im Endlosbetrieb Jetter AG... -
Seite 495: Programmtechnischer Ablauf Für Den Endlosbetrieb
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Programmtechnischer Ablauf für den Endlosbetrieb: Die folgenden Programmhinweise konzentrieren sich auf die Funktion des Endlosbetriebs. Die im Kapitel 9.2.4: "Programmier-Hinweise", Seite 487 ff, erwähnten Festlegungen sind zu beachten. Tabelle Mit Hilfe der folgenden Slaveregister wird die Handhabung der Tabelle parametrieren geregelt. - Seite 496 Es kann unter Umständen auch sinnvoller sein, zuerst die Bewegung der Masterachse zu starten (Programmierschritt f) und g) tauschen). Dies ist abhängig von der Applikation. Anzeige von Aus dem Slaveregister 1xy148 kann zu Diagnosezwecken das aktuelle Tabellen- Tabellenelement ausgelesen werden. informationen Register 122148 = 4 Aktuelles Tabellenelement Jetter AG...
- Seite 497 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Anzeige der In diesem Slaveregister wird die Istposition des Masters angezeigt. Der Istposition des Anwender kann dieses Register nur abfragen (ein Beschreiben ist nicht Masters im Slave zulässig) und die zur Verfügung gestellten Daten als Information (z. B. für Visualisierungszwecke) bzw.
-
Seite 498: Nlr (Tabellenmodus) Über Zeitsteuerung
Dieses Kommando wird dem Slave erteilt und beendet die beschreibung Funktion "Nachlaufregler" (Tabellenmodus) über Zeitsteuerung. Dabei wird gleichzeitig ein HALTACHSE- Befehl ausgeführt. Hinweis! Die Geschwindigkeitsvorsteuerung für die Schleppfehlerkompensation ist in dieser Funktion nicht aktiv (Statusregister 1xy000 Bit 23 = 0). Jetter AG... - Seite 499 Achse 21 Abb. 103: Beispielkonfiguration zum NLR (Tabellenmodus) über Zeitsteuerung Auf Steckplatz 2 ist ein Reglermodul JX6-CON-Move(-BP) gesteckt. Das Submodul 1 ist als Modul JX6-SB ausgeführt. Die Achse 21 ist im dargestellten Beispiel der Slave, der für die Nachlaufreglerfunktion (Tabellenmodus) über Zeitsteuerung vorgesehen ist.
-
Seite 500: Programmtechnischer Ablauf Für Den Nlr Über Zeitsteuerung
Slave den Grenzwert zum Rücksetzen der Position bestimmt. Register 121058 = 80.000 Positive Maximalposition des Masters im Slave Tabelle für die Die Auswahl der Tabelle für die Abfahrt geschieht über das Register 1xy260. Abfahrt auswählen Register 1xy260 = __ Nr. aktuelle Tabelle für Abfahrt Jetter AG... - Seite 501 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Kommando 52 Mit Kommando 52 an die Slaveachse wird die Nachlaufreglerfunktion startet (Tabellenmodus) über Zeitsteuerung gestartet. NLR-Funktion Das Kommando bewirkt: • den Start dieser Nachlaufregler-Funktion, • das Ausschalten der Geschwindigkeitsvorsteuerung, • das Rücksetzen der Istposition des Slaves nach dem Erreichen der letzten Tabellenposition.
-
Seite 502: Registerübersicht: Nachlaufregler (Tabellenmodus)
Kapiteln 6.2 bis 6.7. 053 - Register: Nachlaufregler (Tabellenmodus) Anpassung der Geberauflösungen an die Datenachse Zeiger auf ein Tabellenelement Wert des Tabellenelements Gesamtanzahl der Tabellenelemente Positive Maximalposition des Masters im Slave Zeitbasis für den Nachlaufregler über Zeitsteuerung Jetter AG... - Seite 503 Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Absolute Maximalposition Istposition der Masterachse Nummer der aktuellen Tabelle für Definition Aktuelles Tabellenelement während der Abfahrt Masteroffset Nummer der aktuellen Tabelle für Abfahrt 2096 Überlaufposition des Masters im Slave 3098 Moduswahl für Lageregelung...
-
Seite 504: Registerbeschreibung: Nachlaufregler (Tabellenmodus)
Slaveachse parametriert werden. Der Wert berechnet sich nach folgender Formel: GSZSlaveAchse ------------------------------------------------ - × Register1xy052 1.000 GSZDatenAchse GSZ = Geberauflösung in Register 1xy017 Hinweis! Das Register 1xy052 wird in anderen Spezialfunktionen ebenfalls benutzt, aber mit anderer Bedeutung und Wirkungsweise. Jetter AG... -
Seite 505: Zeiger Auf Ein Tabellenelement
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Register 1xy053: Zeiger auf ein Tabellenelement Funktion Beschreibung Lesen Wert des aktuellen Zeigers Schreiben Übergabe eines neuen Wertes für den Zeiger Wertebereich 0 .. <Reg. 1xy055> Wert nach Reset Dieses Register wird in der Nachlaufreglerfunktion (Tabellenmodus) als Slaveregister benutzt. -
Seite 506: Gesamtanzahl Der Tabellenelemente
Es gibt die maximal mögliche Position der Masterachse in positiver Richtung an und wird zum definierten Rücksetzen des Slaves verwendet. Sobald der Master die in Register 1xy058 hinterlegte Position erreicht hat, wird das Rücksetzen ausgelöst und Ist- und Sollposition des Slaves werden auf Null gesetzt. Jetter AG... -
Seite 507: Zeitbasis Für Den Nachlaufregler Über Zeitsteuerung
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Zeitbasis für den Nachlaufregler Register 1xy075: über Zeitsteuerung Funktion Beschreibung Lesen Wert der aktuellen Zeitbasis Schreiben Übergabe eines neuen Wertes für die Zeitbasis Wertebereich 4 .. +32.766 Wert nach Reset Dieses Register wird in der Nachlaufreglerfunktion (Tabellenmodus) als Slaveregister benutzt, wenn die Abarbeitung der Tabelle über einen Zeitgeber... - Seite 508 Startrampe. Sobald der Master die in Register 1xy085 hinterlegte Position erreicht hat, wird das Rücksetzen ausgelöst und Ist- und Sollposition des Masters werden genau um den parametrierten Wert zurückgesetzt. Hinweis! Das Register 1xy085 wird in anderen Spezialfunktionen ebenfalls benutzt, aber mit anderer Bedeutung und Wirkungsweise. Jetter AG...
-
Seite 509: Nummer Der Aktuellen Tabelle Für Die Definition
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Register 1xy095: Istposition der Masterachse Funktion Beschreibung Lesen Wert der aktuellen Istposition der Masterachse Schreiben nicht zulässig Wertebereich -8.388.608 .. +8.388.607 Wert nach Reset In diesem Slaveregister wird die aktuelle Istposition der Masterachse angezeigt. -
Seite 510: Masteroffset
Slaveregister benutzt. Die Istposition des Masters gelangt zum Slave. Mit Hilfe eines Masteroffsets kann diese Istposition verschoben werden. Der Masteroffset steht im Register 1xy248, die Masterposition im Slave in Register 1xy095. Masterposition im Slave = IstpositionMaster + Masteroffset Jetter AG... -
Seite 511: Nummer Der Aktuellen Tabelle Für Abfahrt
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Nummer der aktuellen Tabelle Register 1xy260: für die Abfahrt Funktion Beschreibung Lesen Wert der aktuellen Tabellen-Nummer für die Abfahrt Schreiben Übergabe eines neuen Wertes für die Tabellen- Nummer im Zusammenhang mit der Abfahrt der... -
Seite 512: Überlaufposition Des Masters Im Slave
Wert der Master zurückgesetzt wurde. Deshalb wird dieser Wert in das Register 1x2096 des Moduls eingetragen, auf dem sich die externen Slaves befinden. Dabei wird immer das Slaveregister für die Achse auf dem Submodulplatz 2 benutzt (1x2096). Jetter AG... -
Seite 513: Achsnummer: Externer Slave 1
Reglermoduls in das Masterregister eingetragen wird. Dabei kann die erste Achse auch eine physikalisch zweite Achse sein. Beispiel: Angenommen auf dem Reglermodul JX6-CON-Move(-BP) auf Steckplatz 3 ist das Submodul 1 als Modul JX6-SB ausgeführt und darüber sind die Achsen 31 und 32 definiert. -
Seite 514: Achsnummer: Externer Slave 2
Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der dritten beteiligten externen Slaveachse eingetragen werden, die sich auf einem anderen Erweiterungsmodul befindet als die zuvor parametrierten Slaves. Jetter AG... -
Seite 515: Achsnummer: Externer Slave 4
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis Register 1x4135: Achsnummer: Externer Slave 4 Funktion Beschreibung Lesen aktuelle Achsnummer der vierten beteiligten externen Slaveachse Schreiben Definition einer neuen vierten beteiligten externen Slaveachse (Eingabe der Achsnummer) Wertebereich 0, 21, 22, 31, 32 .. 81, 82 Wert nach Reset Falls die Nachlaufreglerfunktion mit externen Slaveachsen ausgeführt werden soll,... -
Seite 516: Achsnummer: Externer Slave 6
Master mitgeteilt werden, welche Slaveachsen an der koordinierten Bewegung beteiligt sind. Deshalb muss in diesem Masterregister die logische Achsnummer der sechsten beteiligten externen Slaveachse eingetragen werden, die sich auf einem anderen Erweiterungsmodul befindet als die zuvor parametrierten Slaves. Jetter AG... -
Seite 517: Kommandoübersicht: Nachlaufregler (Tabellenmodus)
Modul JX6-CON-Move(-BP) 9.2 NLR mit dynamischem Übersetzungsverhältnis 9.2.9 Kommandoübersicht: Nachlaufregler (Tabellenmodus) Die folgende Kommandoübersicht enthält alle Kommandos, die unmittelbar für die Funktion "Nachlaufregler mit dynamischem Übersetzungsverhältnis" benutzt werden. Diese Kommandos werden jeweils in das Kommandoregister 1xy001 der betreffenden Master- oder Slaveachse geschrieben. - Seite 518 9 Nachlaufregler JetWeb Jetter AG...
- Seite 519 Modul JX6-CON-Move(-BP) Anhang / Übersichten Jetter AG...
-
Seite 520: Verzeichnis Anhang
Bit 18 = 1: reserviert Bit 19 = 1: Störung Endstufe Bit 20 = 1: Warnung Endstufe Bit 21 = 1: Impulsfreigabe Endstufe Bit 22 = 1: Fehler bei fortlaufender Interpolation Bit 23 = 1: reserviert (*) => Default-Einstellung nach Reset Jetter AG... -
Seite 521: Anhang B: Kurzübersicht Steuerregister
Modul JX6-CON-Move(-BP) Anhang B: Kurzübersicht Steuerregister Bedeutung der Steuerbits Bit 0 = 1: Referenzschalter 24 V aktiv, Schließer (*) Bit 1 = 1: Endschalter 24 V aktiv, Schließer (*) Bit 2 = 1: reserviert Bit 3 = 1: Drehrichtung der Motorwelle entgegen Uhrzeigersinn Bit 4 = 1: Nachlaufregler: obere Tabellenhälfte abarbeiten... -
Seite 522: Anhang C: Kurzübersicht Kommandos
Absolute Positionierung (*) Nach unterbrochener Positionierung weiterfahren Relativpositionierung mit Starteingang - EIN Relativpositionierung mit Starteingang AUS (*) Am Referenzpunkt halten - EIN (*) Am Referenzpunkt halten - AUS Nächste Interpolation anhängen Kombinierte Kreis- und Linearinterpolation 26 - 29: reserviert Jetter AG... - Seite 523 Modul JX6-CON-Move(-BP) Die Kommandos Nachlaufregler: Master sendet Istposition an externe Slaves Nachlaufregler: Slave liest Istposition des Masters Achse 1 ist Slave Achse 2 ist Slave 34 - 37: reserviert Master-Slave-Konfiguration 1 für Linearinterpolation Master-Slave-Konfiguration 2 für Linearinterpolation Master-Slave-Konfiguration 3 für Linearinterpolation Start Interpolation Achse aus Interpolation bzw.
- Seite 524 Nachlaufregler: Virtuelle Achse - AUS (*) 127 - 138: reserviert 139: Nachlaufregler: Skalierung Tabelle - EIN 140: Nachlaufregler: Skalierung Tabelle - AUS (*) 141: reserviert 142: Spline-Interpolation: Neuberechnung der Spline-Länge 143 - 255: reserviert (*) => Default-Einstellung nach Reset Jetter AG...
-
Seite 525: Anhang D: Kurzübersicht Register
Modul JX6-CON-Move(-BP) Anhang D: Kurzübersicht Register Reg.- Ken- Register nung Statusregister - siehe Kurzübersicht Anhang A Kommandoregister - siehe Kurzübersicht Anhang C Sollposition der Achse Sollgeschwindigkeit der Achse Steuerregister - siehe Kurzübersicht Anhang B Startrampe Stopprampe Zielfensterbereich reserviert Istposition der Achse ES 2 P-Verstärkung des Lagereglers... - Seite 526 Istposition externer Slave 2 zur Diagonalenberechnung Länge der Softwareachse KI/FI Mittelpunkt Achse 1 (3D-KI: Mittelpunkt 1) KI/FI Mittelpunkt Achse 2 (3D-KI: Mittelpunkt 2) 043 - reserviert KI/FI Sollwinkel der Kreisinterpolation (3D-KI: Sollwinkel) Berechneter Radius der Kreisinterpolation Berechneter Startwinkel der Kreisinterpolation Jetter AG...
- Seite 527 Modul JX6-CON-Move(-BP) Reg.- Ken- Register nung Berechnete Kreisbogenlänge der Kreisinterpolation Berechnete Zielposition Achse 1 (Master) Berechnete Zielposition Achse 2 (Slave) LI/KI/FI Anpassung der Maximalgeschwindigkeiten an die Datenachse LI/KI/FI/ Anpassung der Geberauflösungen an die Datenachse Zeiger auf ein Tabellenelement Wert des Tabellenelements Gesamtanzahl der Tabellenelemente Faktor des Übersetzungsverhältnisses zwischen...
- Seite 528 KI: Verdrehung um Z-Achse 090 - reserviert Puffer für Kreisinterpolation reserviert Istposition der Masterachse Überlaufposition des Masters im Slave Sollposition 3. Achse Mastermodul Moduswahl für Lageregelung Versionsnummer des Betriebssystems 100 - reserviert Achsnummer Achse 1 Achsnummer Achse 2 Jetter AG...
- Seite 529 Modul JX6-CON-Move(-BP) Reg.- Ken- Register nung 130 - reserviert LI/NL Achsnummer externer Slave 1 LI/NL Achsnummer externer Slave 2 LI/NL Achsnummer externer Slave 3 LI/NL Achsnummer externer Slave 4 Achsnummer externer Slave 5 Achsnummer externer Slave 6 138 - reserviert Nummer der aktuellen Tabelle für Definition...
- Seite 530 Nummer der aktuellen Tabelle für Abfahrt 261 - reserviert ES 2 Geräte-Nennspannung ES 2 Geräte-Nennstrom ES 2 Maximaler Geräte-Ausgangsstrom ES 2 -Wert des Stromreglers ES 6 ES 2 -Wert des Stromreglers ES 6 ES 2 Motor-Spannungskonstante K ES 2 Preset-Wert für den Drehzahlregler Jetter AG...
- Seite 531 Modul JX6-CON-Move(-BP) Reg.- Ken- Register nung 307 - reserviert ES 2 Betriebsmodus ES 2 Betriebsmodus 7-Segment-Anzeige ES 2 Schleppfehler Fensterzeit reserviert ES 2 Auslöseschwelle UzkMax-Überwachung ES 2 Auslöseschwelle UzkMin-Überwachung ES 2 Auslösezeit für die Blockierüberwachung ES 2 Verzögerungszeit nach dem Öffnen der...
- Seite 532 Legende zur Tabellenspalte „Kennung“: Allgemeine Register Register Digitaler Drehzahlregler ES 2 Register Endstufe JetMove 2xx ES 6 Register Endstufe JetMove 6xx Register Fortlaufende Interpolation Register Inkrementalgeber Register Kreisinterpolation Register Linearinterpolation Register Lageregler Register Nachlaufregler Register Positionssicherung Register Relativpositionierung Register Spline-Interpolation Jetter AG...
- Seite 533 Modul JX6-CON-Move(-BP) Anmerkung zur Tabellenspalte „R/W“: „R/W“ = „Read/Write“ = „Lesen/Schreiben“ und bedeutet: das Register kann gelesen und beschrieben werden. „R“ = „Read“ = „Lesen“; das Register kann nur gelesen werden. Jetter AG...
-
Seite 534: Anhang E: Fehler + Warnungen Endstufe Jetmove 2Xx
(wird im Zusammenhang mit der Fehler-Nr. F00 gesetzt) Timeout bei der Kommunikation zwischen Regler und Leistungsteil (wird im Zusammenhang mit der Fehler-Nr. F00 gesetzt Impulsfreigabe Fehler (Bei Erteilung von Kommando 1 bzw. 2 ist HW-Signal der Impulsfreigabe und/oder Zwischenkreisspannung nicht vorhanden) Jetter AG... - Seite 535 Modul JX6-CON-Move(-BP) Fehler-Nr. F16 bis F27: Fehler 2 Geräteeingangsstrom ist zu hoch Software-Endschalter erreicht oder überschritten Hardware-Endschalter erreicht oder überschritten Fehlerreaktion der Steuerung (dem Antrieb übergeordnet) nicht rechtzeitig eingetroffen Unterspannung Zwischenkreis mit einstellbarem Minimalwert Überspannung Zwischenkreis mit einstellbarem Maximalwert Antrieb blockiert (Auslösezeit für Blockierüberwachung über...
-
Seite 536: Anhang F: Fehler Und Warnungen Endstufe Jetmove 6Xx
Anhang F: Fehler und Warnungen Endstufe JetMove 6xx Fehler-Nr. F01 bis F32: Fehler Kühlkörpertemperatur Zwischenkreisspannung Schleppfehler Feedback Unterspannungsschutz Motortemperatur Interne Hilfsspannung Überdrehzahl EEPROM Bremse Umgebungstemperatur Leistungsendstufe t Max Netz-BTB A/D-Konverter Ballast Netzphase Erdschluss Warnung generiert Fehlermeldung Kommutierungsfehler AS-Option Externe Trajektorie Systemfehler Jetter AG... - Seite 537 Modul JX6-CON-Move(-BP) Fehler-Nr. n01 bis n14: Warnungen t-Schwelle Ballastmeldung Schleppfehler Netzphase Software-Endschalter 1 Software-Endschalter 2 Positiver Hardware-Endschalter Negativer Hardware-Endschalter Defaultwerte SinCos Feedback Jetter AG...
-
Seite 538: Anhang G: Aktuelle Änderungen
Abb. 17 Schnittstelle Servoverstärker Kapitel 4.4 Funktion der Leuchtdioden Kapitel 5.3 Statt Steuerung JX6 Steuerung JetControl Kapitel 6.2 Statt Steuerung JX6 Steuerung JetControl Kapitel 6.6.1 Bedeutung Reg. 1xy362 und 1xy375 Kapitel 7.4.1 Abb. 47 Capture-Modus Anhang G Aktuelle Änderungen Schlussblatt Jetter AG... -
Seite 539: Anhang H: Abkürzungsverzeichnis
Modul JX6-CON-Move(-BP) Anhang H: Abkürzungsverzeichnis Allgemeine und technische Abkürzungen: Abb. Abbildung AS-Option Sicherheitsrelais (personell sichere Anlaufsperre) 8-Bit-Controller von der Firma Atmel, der auf den Leistungsteilen der JetMove 2xx-Geräte sitzt und dort Überwachungsaufgaben erledigt. binary digit: kleinste Informationseinheit in der Computer- und... - Seite 540 Safe Extremly Low Voltage: Spannung bis 60 V, galvanisch vom Netz getrennt. Speicher Programmierbare Steuerung Synchron Serielles Interface: spezielle Art von Gebern zur Istwerterfassung SUB-D Typenbezeichnung für Steckverbinder u.a. unter anderem usw. und so weiter Zwischenkreisspannung vgl. vergleiche z. B. zum Beispiel Jetter AG...
- Seite 541 Submodul: 8 analoge Eingänge DA 4 Submodul: 4 analoge Ausgänge Submodul: 16 digitale Ausgänge E-Getriebe Elektrisches Getriebe: Betriebsart des Nachlaufreglers Geberstrichzahl Bezeichnung von Eingängen auf Jetter-Frontplatten Nachlaufregler Bezeichnung von Ausgängen auf Jetter-Frontplatten Submodul: Schritt Motor Submodul: Servo Regler oder schneller Zweikanalzähler ÜV Übersetzungsverhältnis...
- Seite 542 Sekunde: Maßeinheit der Zeit U/min Umdrehungen pro Minute: Maßeinheit der Drehzahl Volt: Maßeinheit der Spannung (DC 24 V: entspricht 24 V Gleichspannung) Volt Ampere: Maßeinheit der elektrischen Leistung Watt: Maßeinheit der Leistung °C Grad Celsius: Maßeinheit der Temperatur Jetter AG...
-
Seite 543: Anhang I: Abbildungsverzeichnis
Abb. 13: Anschlussbild Abb. 14: Spannungsversorgung Abb. 15: Beschaltung der digitalen Eingänge Abb. 16: Beschaltung der digitalen Ausgänge Abb. 17: Schnittstelle Servoverstärker und Modul JX6-CON-Move(-BP) Abb. 18: Schnittstelle zum Servoverstärker (9-polig SUB-D) Abb. 19: Leuchtdioden Abb. 20: Leuchtdioden Achszustände Abb. 21: Geschlossener Regelkreis Abb. - Seite 544 Abb. 98: Aufbau zum Nachlaufregler Variante 3 Abb. 99: Aufbau zum Nachlaufregler Variante 4 Abb. 100:Aufbau zum Nachlaufregler Variante 5 Abb. 101:Nachlaufregler (Tabellenmodus) und Endlosbetrieb Abb. 102:Beispielkonfiguration zum NLR im Endlosbetrieb Abb. 103:Beispielkonfiguration zum NLR (Tabellenmodus) über Zeitsteuerung 499 Jetter AG...
-
Seite 545: Anhang J: Stichwortverzeichnis
Modul JX6-CON-Move(-BP) Stichwortverzeichnis Anhang J: Stichwortverzeichnis Absolutwertgeber HIPERFACE Anschlussbild einer Servoachse Inkrementalgeber Resolver Bahnsteuerungen 215ff siehe auch Interpolationen Kombinierte Kreis- und Linearinterpolation Bestimmungsgemäße Verwendung 316ff Überblick Blockschaltbild Funktionsprinzip Allgemeine Voraussetzungen Konfigurationen 318ff Allgemeine Festlegungen Drehzahlregler Allgemeiner Aufbau Registerbeschreibung 136ff 175ff... - Seite 546 Prinzip eines Regelkreises Konfigurationen Variante 1 Signale Konfigurationen Variante 2 Register Konfigurationen Variante 3 Nummerierung Konfigurationen Variante 4 Übersichten: Anhang A, B, C, D Konfigurationen Variante 5 Registerbeschreibung Programmierhinweise 487ff Endstufen-Betriebsarten-Register Tabellenaufbau 469ff JetMove 2xx 130ff Allgemeine Festlegungen Endstufen-Drehzahlregler Jetter AG...
- Seite 547 Modul JX6-CON-Move(-BP) Stichwortverzeichnis JetMove 2xx 136ff Servoverstärker JetMove 6xx 175ff Sicherheitshinweise Endstufen-Parameterregister Spannungsversorgung JetMove 2xx 142ff Spline-Interpolation 401ff JetMove 6xx 181ff Überblick Endstufen-Statusregister Ablaufbeschreibung 402ff JetMove 2xx 120ff Dateneingabe JetMove 6xx 152ff Berechnung Spline-Bewegung 404 Geschwindigkeitsregister 111ff Ausführen Spline-Bewegung Kommandoregister...
- Seite 548 +49 7141 2550-484 Hotline: +49 7141 2550-444 Internet: http://www.jetter.de E-Mail: sales@jetter.de Tochtergesellschaften Jetter Asia Pte. Ltd. Jetter (Schweiz) AG Jetter USA Inc. 32 Ang Mo Kio Industrial Park 2 Münchwilerstraße 19 165 Ken Mar Industrial Parkway #05-02 Sing Industrial Complex CH-9554 Tägerschen...