SMC LATCA Serie Betriebsanleitung
Vorschau ausblenden
Andere Handbücher für LATCA Serie:
- Betriebsanleitung (40 Seiten) ,
- Betriebsanleitung (101 Seiten)

Verwandte Anleitungen für SMC LATCA Serie





Inhaltszusammenfassung für SMC LATCA Serie
- Seite 1 Dok-Nr. LA*-OMR0031-A Betriebsanleitung PRODUKTNAME Card Motor-Controller (Schrittdaten-Eingabemethode) Modell / Serie / Produktnummer Serie LATCA...
- Seite 2 Zu dieser Betriebsanleitung Die vorliegende Betriebsanleitung [Card Motor-Controller (Schrittdaten-Eingabemethode)] bietet einen Überblick über den Betrieb des Card Motor-Controllers LATCA-* bei Verwendung im Schrittdaten-Eingabe-Modus. Für die Verwendung im Impulseingangs-Modus siehe spezifische Betriebsanleitung [Card Motor-Controller (Impuls-Eingabemethode)] und für die Verwendung mit serieller Kommunikation siehe spezifische Betriebsanleitung [Card Motor-Controller (Methode mit serieller Kommunikation)].
-
Seite 3: Inhaltsverzeichnis
Inhalt 1. Sicherheitsvorschriften ............6 2. Produktübersicht ................. 8 2.1 Merkmale ....................8 2.2 Bestellschlüssel ................. 11 2.3 Aufbau des Produkts ................ 12 2.4 Inbetriebnahme .................. 13 (1) Verpackungsinhalt prüfen ............13 (2) Montage des Controllers ............13 (3) Verdrahtung und Anschluss ............13 (4) Spannungsversorgung ON und Alarmprüfung ....... - Seite 4 6. CN4: Counter-Stecker ............24 6.1 Technische Daten des Counter-Steckers ........24 6.2 Verdrahtung des Counter-Steckers ..........24 7. CN5: Paralleler I/O-Anschluss ..........25 7.1 Technische Daten des Parallel-I/O-Steckers ........25 7.2 Technische Daten Parallel-I/O ............25 7.3 Parallel-I/O-Schaltkreis (NPN, PNP) ..........25 (1) Parallel-I/O-Eingangsschaltkreis ..........
- Seite 5 12.1 Beispiel für die Rückkehr zur Referenzposition ......51 12.2 Beispiel für den Positionierbetrieb ..........52 12.3 Beispiel für den Schubbetrieb ............53 13. Hinweise zur Bedienung ............. 54 13.1 Überblick über den Betrieb ............54 13.2 Prozesse des Parallel-I/O-Betriebs ..........54 (1) Spannungsversorgung ON und Rückkehr zur Referenzposition ..
- Seite 6 18. Fehlersuche ................89 18.1 Betriebsfehler .................. 89 18.2 Fehler bei Position-Geschwindigkeit-Schubkraft ......92 18.3 Konfigurationssoftware ..............94 - 5 -...
-
Seite 7: Sicherheitsvorschriften
3. Vor dem erneuten Start der Maschine bzw. Anlage sind Maßnahmen zu treffen, um unvorhergesehene Bewegungen des Produkts oder Fehlfunktionen zu verhindern. 4. Bitte wenden Sie sich an SMC und treffen Sie geeignete Sicherheitsvorkehrungen, wenn das Produkt unter einer der folgenden Bedingungen eingesetzt werden soll: 1. -
Seite 8: Gewährleistung Und Haftungsausschluss/Einhaltung Von Vorschriften
Herstellern Massenvernichtungswaffen oder sonstigen Waffen ist strengstens untersagt. 2. Der Export von SMC-Produkten oder -Technologie von einem Land in ein anderes hat nach den an der Transaktion beteiligten Ländern geltenden Sicherheitsvorschriften und -normen zu erfolgen. Vor dem internationalen Versand eines jeglichen SMC-Produktes ist sicherzustellen, dass alle nationalen Vorschriften in Bezug auf den Export bekannt sind und befolgt werden. -
Seite 9: Produktübersicht
2. Produktübersicht 2.1 Merkmale Dieser Controller betätigt einen angeschlossenen Card Motor mittels Parallel-I/O-Signalen Impulsfolgesignalen aus einer SPS oder einer ähnlichen Komponente. Der Controller sendet außerdem Ausgangssignale, wie z.B. die Tischposition des Card Motors und ein Signal bei Abschluss des Arbeitsgangs an die SPS zurück. Im Folgenden werden die Merkmale und Funktionen dieses Produkts ausführlich beschrieben. - Seite 10 [Step data input type] Bei der Ausführung mit Schrittdaten-Eingabe können folgende Funktionen verwendet werden. (6) Einfache Konfiguration der Schrittdaten mit Hilfe der Zykluszeit-Eingabemethode. Wahl des Positionier- und Schubbetriebs. Sobald die Einstellung der Zielposition, Positionierzeit und Schubkraft abgeschlossen ist, können der Positionier- und Schubbetrieb durchgeführt werden.
- Seite 11 (15) Betrieb durch 4 konfigurierbare (PID) Regelparametermuster (Schrittdaten). Vier unterschiedliche Regelparametermuster sind zur Abstimmung auf die Sollwerte der bewegten Masse und des Schubs konfigurierbar. Die Antriebsleistung kann durch Anpassung dieser Regelparameter entsprechend der spezifischen Nutzlast konfiguriert werden. Einen der vier verschiedenen Kraftwerte wählen, um den Schubbetrieb auszuführen.
-
Seite 12: Bestellschlüssel
2.2 Bestellschlüssel Der Bestellschlüssel wird unten erläutert. L A T C A - N X 1 5 2 - Anm.3) Produktion auf Bestellung Anm.2) Card Motor-Controller Standardprodukt X152 I/O-Kabel (ohne Abschirmung) Option Parallel-I/O Direktmontage Anm. 1) DIN-Schienenmontage Anm. 3) I/O-Kabellänge ohne Kabel Anm. -
Seite 13: Aufbau Des Produkts
2.3 Aufbau des Produkts Es folgt ein Beispiel für den Aufbau des Controllers. Systemaufbau Vom Anwender Anm. 2) • Controller Separat erhältliches Produkt Anm. 1 Anm. 3) bereitzustellen • Multi-Counter Anm. 1) Option • Counter-Kabel Anm. 5) • SPS • I / O-Kabel Zubehör •... -
Seite 14: Inbetriebnahme
2.4 Inbetriebnahme Das Produkt bei der erstmaligen Nutzung wie nachfolgend beschrieben installieren, verdrahten, einstellen und betreiben. (1) Verpackungsinhalt prüfen Vor der Verwendung dieses Controllers sicherstellen, dass der gelieferte Inhalt mit der Bestellung übereinstimmt. Controller Produktname Anzahl Counter-Stecker Controller (LATCA- *** ) 1 Stk. -
Seite 15: Spannungsversorgung On Und Alarmprüfung
(4) Spannungsversorgung ON und Alarmprüfung Sicherstellen, dass Drähte korrekt angeschlossen sind Anschluss VDC-Spannungsversorgung einschalten. Farbe Status grün normal Alarm wird erzeugt Controller Wenn die [PWR]-LED vorne am Controller grün leuchtet, ist der Controller-Status normal. Wenn die [ALM]-LED vorne am Controller rot leuchtet oder blinkt, wurde ein Alarm ausgelöst. Achtung Wenn ein Alarm erzeugt wird Die Alarmart kann anhand der Kombination des Einschalt- oder Blink-Status der ALARM- und... -
Seite 16: Technische Daten Controller
3. Technische Daten Controller 3.1 Spezifikationen Grundspezifikationen des Produkts. Position Technische Daten Ausführung mit Eingangsart Anm. 1) Impulseingang-Ausführung Schrittdaten-Eingang Kompatibler Motor LAT3 Serie Anzahl der Achsen pro Controller Eine Achse Regelung geschlossener Regelkreis mit Encoder-Feedback-Signal Versorgungsspannung: 24 VDC +/-10 % Spannungsversorgungs- Stromaufnahme: 2 A (maximal 3 A) Anm. -
Seite 17: Bauteile
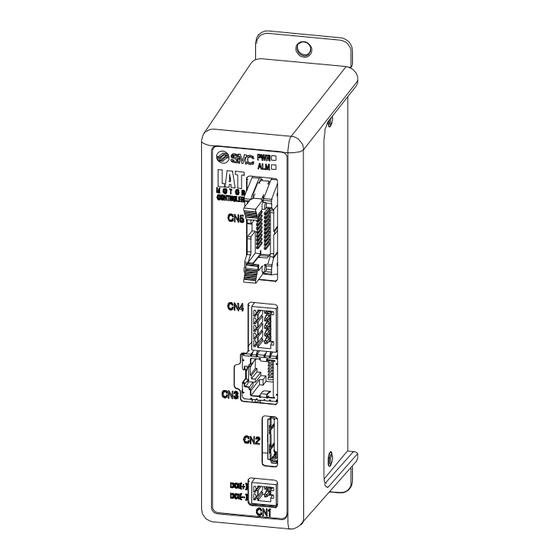
3.2 2 Bauteile Es folgt eine Beschreibung der Bauteile des Controllers. Gehäuse entfernen. (10) 1 2 3 4 5 6 Eingangssignal-DIP-Schalter (werkseitige Einstellung) Pos. Display Bezeichnung Details Normalbetrieb: Leuchtet grün Spannungsversorgungs- und Wenn die PWR- und ALM-LEDs gleichzeitig leuchten (ON) oder Alarm-LED (grün) blinken, wurde ein Alarm ausgelöst. -
Seite 18: Außenabmessungen
3.3 Außenabmessungen Controller-Außenabmessungen (1) Direktmontage (LATCA-**) (81,7) Ø 4,5 für Gehäusemontage für Gehäusemontage (2) DIN-Schienenmontage (LATCA-**D) (81,7) (11,5) *DIN-Schiene (35 mm) (91,7) - 17 -... -
Seite 19: Montage
3.4 Montage (1) Montage Der Controller kann direkt mit Schrauben oder mithilfe der DIN-Schiene montiert werden. Einzelheiten zu den Montageoptionen des Controllers werden nachfolgend gezeigt. - DIN-Schienenmontage (LATCA-**D) - Direktmontage (LATCA-**) (Montage mit DIN-Schiene) (Montage mit zwei M4-Schrauben) bei verriegelter DIN-Schiene Erdungs- Erdungs- Erdungs-... -
Seite 20: Montageposition
Achtung Die Erdung muss über einen separaten Erdungsanschluss erfolgen. Einen Erdungsanschluss der Klasse D verwenden (Erdungswiderstand weniger als 100 Ω). Das Erdungskabel muss einen Querschnitt von min. 2 mm haben. Der Erdungspunkt sollte so nah wie möglich am Controller liegen, um die Drahtlänge so kurz wie möglich zu halten. -
Seite 21: Externe Anschlüsse
4. Externe Anschlüsse Das Beispiel der Standardverdrahtung des Controllers wird für jeden einzelnen Stecker dargestellt (CN1 bis CN5). 4.1 CN1: Spannungsversorgungsstecker Controller Controller-Eingangs- spannungsversorgung 24 VDC Kabel (Die Controller-Eingangsspannungsversorgung (24 VDC) und die Drähte müssen vom Anwender bereitgestellt werden.) Siehe Punkt 5. CN1: Spannungsversorgungsstecker (S. 22) für Details zur Verdrahtung. Achtung Verwenden Sie für den Controller keine einschaltstrombegrenzte Spannungsversorgung. -
Seite 22: Cn4: Counter-Stecker (Option)
4.4 CN4: Counter-Stecker (Option) Den Controller mit Hilfe des Counter-Kabels (LATH3-*) an den Multi-Counter (CEU5) anschließen. Controller Multi-Counter Counter-Kabel Siehe Abschnitt 6.2 Counter-Stecker-Verdrahtung (S. 24). 4.5 CN5: Paralleler I/O-Anschluss Den Controller mit Hilfe des I/O-Kabels (mit Abschirmung, Ausführung LATH5-* oder ohne Abschirmung, Ausführung LATH2-*) an eine SPS anschließen. -
Seite 23: Cn1: Spannungsversorgungsstecker
5. CN1: Spannungsversorgungsstecker 5.1 Technische Daten Spannungsversorgungsstecker Die technischen Daten des im Lieferumfang des Controllers enthaltenen Spannungsversorgungssteckers werden nachfolgend beschrieben. Spannungsversorgungs- Klemme Funktion Beschreibung der Funktion stecker Der Controller wird mit dem negativen Terminal der Spannungsversorgung (-) verbunden. Spannungs- DC1 (-) Die Spannungsversorgung (-) wird dem Card Motor versorgung (−) ebenfalls über den internen Schaltkreis des Controllers... -
Seite 24: Verdrahtung Des Spannungsversorgungssteckers
5.3 Verdrahtung des Spannungsversorgungssteckers Den als Zubehör mitgelieferten Spannungsversorgungsstecker an die 24 VDC-Spannungsversorgung des Controllers anschließen und an den Spannungseingang des Spannungsversorgungssteckers anschließen. - Öffnen / Schließen-Hebel Den Öffnen/Schließen-Hebel mit einem speziellen Schraubendreher drücken und das Kabel in den Spannungseingang Kabeleingang einführen. -
Seite 25: Cn4: Counter-Stecker
6. CN4: Counter-Stecker 6.1 Technische Daten des Counter-Steckers Die technischen Daten des im Lieferumfang des Controllers enthaltenen Counter-Steckers werden nachfolgend beschrieben. Bezeich- Farbe Counter-Stecker Beschreibung nung Anschlusskabel Phase B Anschluss an den Phase-B-Draht des Counter-Kabels. Weiß Phase A Anschluss an den Phase-A-Draht des Counter-Kabels. Anschluss an den GND-Draht des Counter-Kabels. -
Seite 26: Cn5: Paralleler I/O-Anschluss
7. CN5: Parallel I/O-Anschluss 7.1 Technische Daten des Parallel-I/O-Steckers Nachfolgend werden die technischen Daten des Parallel-I/O-Steckers aufgeführt. Siehe Abschnitt 7.5 Parallel-I/O-Signalkabel (S. 31) für den Zusammenhang der Klemmennummern und I/O-Signale. Bestell-Nr. HIF6-20PA-1.27DS 7.2 Technische Daten Parallel-I/O - Eingangsdaten - Ausgangsspezifikationen (NPN und PNP, außer Impulseingangsklemme) (NPN, PNP) Position... -
Seite 27: Parallel-I/O-Ausgangsschaltkreis
(2) Parallel-I/O-Ausgangsschaltkreis - NPN-Ausführung Anschlussseite im Controller DC2(+) <B1> BUSY<B3> 10 kΩ bis OUT1<B6> 100 kΩ DC2(-)<B2> - PNP-Ausführung Anschlussseite im Controller DC2(+) <B1> 100 kΩ BUSY <B3> 10 kΩ bis OUT1<B6> DC2(-) <B2> - 26 -... -
Seite 28: Parallel-I/O-Signale (Schrittdaten-Eingabe-Ausführung)
7.4 Parallel-I/O-Signale (Schrittdaten-Eingabe-Ausführung) (1) Eingangsseite (Schrittdaten-Eingabe-Ausführung) Funktion Bezeichnung Gemeinsame Klemme für die Eingangssignal-Spannungsversorgung. Die (+)-Seite der Spannungsversorgung oder die (-)-Seite der Spannungsversorgung entsprechend den Verdrahtungsspezifikationen anschließen. Die Schrittdaten-Bit-Nr. wird zugeordnet (Eingabe über die Kombination von IN0 bis IN3) Wenn alle Positionen IN0 bis IN3 ausgeschaltet (OFF) sind, wird die Rückkehr zur Referenzposition ausgeführt (Schrittdaten-Nr. - Seite 29 (2) Ausgangsseite (Schrittdaten-Eingabe-Ausführung) Funktion Bezeichnung Die 24 V-Klemme der Spannungsversorgung (24 VDC) für die Eingangs-/ DC2(+) Ausgangssignale anschließen. Die 0 V-Klemme der Spannungsversorgung (24 VDC) für die Eingangs-/ Ausgangssignale DC2(-) anschließen. Das BUSY-Ausgangssignal schaltet sich ein (ON), wenn der Card Motor sich bewegt (bei der Rückkehr zur Referenzposition, dem Positionierbetrieb und dem Schubbetrieb).
- Seite 30 Achtung Der „Kraft-Grenzwert“ wird im Fenster „I/O Setup“ als allgemeiner Wert für alle Schubbetrieb-Schrittdaten eingestellt. Der „Schub-Sollwert“ kann jedoch für alle Schrittdaten individuell eingestellt werden. Daher kann der INF-Ausgang aktiviert werden, wenn die Schubkraft von dem eingestellten „Schub-Sollwert“ abweicht. - INFP-Signal Der Ausgang schaltet auf ON, wenn die aktuelle Tischposition des Card Motors innerhalb des Bereichs der Positionier-Wiederholgenauigkeit der Zielposition liegt (LAT3: 0,09 mm, LAT3F: 0,005 mm).
- Seite 31 (3) Tabelle der Eingänge/Ausgänge (Schrittdaten-Eingabe-Ausführung) Eingang/Ausgang Funktion Klemmen-Nr. Eingang DRIVE SVON A8 bis A10 DC2(+) DC2(-) BUSY Ausgang ALARM OUT0 OUT1 Anm. 1) B7 bis B10 Anm. 1) Bei Verwendung der Schrittdaten-Eingabemethode keine Drähte an die Klemmen B7 bis B10 anschließen.
-
Seite 32: Parallel-I/O-Signalkabel (Schrittdaten-Eingabe-Ausführung)
7.5 Parallel-I/O-Signalkabel (Schrittdaten-Eingabe-Ausführung) (1) I/O-Kabel (ohne Abschirmung) LATH2-** I/O-Kabel eingegossen eingegossen (10) Controller-Seite SPS-Seite (2) I/O-Kabel (mit Abschirmung) LATH5-* I/O-Kabel Schirmdraht Anschluss an SPS usw. Stecker für LATH2-* LATH5-* Eingang/ Klemmen- Funktion Isolierungs- Isolierungs- Punkt-Mar- Ausgang nummer (Schrittdaten-Eingabe) Punkt-Farbe farbe farbe kierung Hellbraun... -
Seite 33: Verdrahtung Parallel-I/O-Stecker (Beispiel)
7.6 Verdrahtung Parallel-I/O-Stecker (Beispiel) Ein I/O-Kabel (LATH2-* oder LATH5-*) für den Anschluss des Parallel-I/O-Steckers CN5 des Controllers an eine SPS verwenden. Die Verdrahtung ist abhängig vom Parallel-Eingang/Ausgang des Controllers (Ausführung NPN, PNP). Die Verdrahtung des Produkts unter Berücksichtigung des nachfolgenden Verdrahtungsschemas vornehmen. -
Seite 34: Eingangssignal-Schalter
8. Eingangssignal-Schalter Dieser Schalter wird bei der Schrittdaten-Eingabe-Ausführung nicht verwendet. - 33 -... -
Seite 35: Controller-Setup
9. Controller-Setup Bevor der Controller betrieben werden kann, um den Card Motor auf eine bestimmte Position zu verfahren, müssen zunächst die folgenden Positionen mit Hilfe eines PCs (mit installierter Controller- Konfigurationssoftware) programmiert werden. Die mit Hilfe der Controller-Konfigurationssoftware eingegebenen Daten werden im Controller-Speicher gespeichert. 9.1 Suchen/Verbinden des Controllers Konfigurationssoftware sucht... -
Seite 36: Einstellen Der Grundparameter
9.3 Einstellen der Grundparameter Die Bestell-Nr. des angeschlossenen Card Motors, der am Controller angeschlossen ist und die Betriebsbedingungen müssen spezifiziert werden. Basic Parameter Setup Bezeichnung Eingabebereich Beschreibung Die Bestell-Nr. des Card Motors wählen, der an den Controller angeschlossen ist. Bestell-Nr. Technische Daten LAT3-10 Hub 10 mm, Auflösung 30 μm... -
Seite 37: Schrittdaten-Eingabe-Ausführung
9.4 Schrittdaten-Eingabe-Ausführung Die Schrittdaten-Eingabe-Ausführung wie folgt auswählen. Bezeichnung Beschreibung Zum einen kann der Tisch auf der Grundlage der Position und der Cycle Time Positionierzeit betrieben werden und zum anderen mit einer hohen Frequenz. Entry Method Geschwindigkeit, Beschleunigung und Abbremsung werden automatisch auf (recommended) der Grundlage der eingestellten Zielposition und Positionierzeit berechnet. -
Seite 38: Geschwindigkeits-Eingabemethode
(2) Speed entry method (Geschwindigkeits-Eingabemethode) Einstellungen: Zielposition [mm], Geschwindigkeit [mm/s], Beschleunigung [mm/s Abbremsung [mm/s ], Bewegte Masse [g] Zur Ermittlung der Gesamtstrecke S [mm] im Beschleunigung Aa Geschwindigkeit Vc absoluten Positioniermodus die Differenz zwischen Reichweite S der Startposition der Tisch-Verfahrbewegung und Abbremsung Ad der Zielposition berechnen. -
Seite 39: I/O-Einstellung
9.5 I/O-Einstellung Einstellungen für die Parallel-I/O-Signale: Eingangs- Bezeichnung Beschreibung wertebereich Zeigt den momentanen Eingangs- und den Ausgangssignal-Status an. I/O-Status Grün/rot: ON, Schwarz: OFF Siehe 7.4 Parallel-I/O-Signale (S. 27) für Details zu den I/O-Signalen. Die einzelnen Ausgangssignale können unabhängig von ihrem aktuellen Status manuell ON und OFF geschaltet werden, um den Anschluss zu prüfen. -
Seite 40: Schrittdaten-Einstellung
9.6 Schrittdaten-Einstellung Schrittdaten sind die voreingestellten Daten, die im Wesentlichen die Bewegung des Motors beschreiben. Der Controller kann insgesamt 15 Schrittdaten (2 Arten) handhaben. Schrittdaten-Details Bezeichnung Funktion Beschreibung Editing of Cut (Ausschneiden): die ausgewählten Schrittdaten werden ausgeschnitten. Step Data Copy Copy (Kopieren): die ausgewählten Schrittdaten werden kopiert. - Seite 41 Positioning time 0 bis 60 Einstellung der Positionierzeit zur Zielposition (Einheit: s). Bei Einstellung auf „0“ wird keine Positioniersteuerung ausgeführt. Achtung Je nach Reihenfolge der Schrittdaten ist der Betrieb unter Umständen nicht möglich. In diesem Fall wird ein Alarm ausgegeben und der Betrieb startet nicht. Vor der Einstellung die Betriebsbedingung und die Reihenfolge der Schrittdaten gründlich prüfen.
-
Seite 42: Überwachungs- Und Testmodus Des Controllers
10. Überwachungs- und Testmodus des Controllers Im Fenster „Monitor / Test“ kann der Card Motor-Status überwacht und die Leistung getestet werden. Monitor mode: Der Card Motor-Status kann von einem PC aus überwacht werden, wenn der Card Motor über Parallel-I/O-Signale betrieben wird. Nach Auswahl des Überwachungsmodus mit Hilfe der Parallel-I/O-Signale die Rückkehr zur Referenzposition ausführen, bevor der Card Motor im Überwachungsmodus betrieben wird. - Seite 43 „Jog“ eingestellt ist. Die Abbremsung und Beschleunigung sind fest eingestellt und nicht änderbar. Die Einstellung der bewegten Masse für die „Step Data No. 1“ wird für den Tippbetrieb verwendet. Einstellung des Bereichs und der min. Strecken für den Tippbetrieb. LAT3-*: 0,09 mm bis max. Hub [mm] (in Schritten von: 0,03 mm) LAT3M-*: 0,01 mm bis max.
- Seite 44 Schubbetrieb die Zielposition erreicht. Der nächste Schritt wird ausgeführt, sobald der Controller geantwortet hat, dass der vorherige Schritt abgeschlossen und die eingestellte „Betriebsdauer“ abgelaufen ist. Operating time Für die „Betriebsdauer“ einen Wert eingeben, der min. 0,1 Sekunden länger ist als die für die einzelnen Schrittdaten eingestellte „Positionierzeit“.
-
Seite 45: Betrieb
11. Betrieb 11.1 Rückkehr zur Referenzposition Der Card Motor verwendet einen Inkrementalsensor (Lineargeber) zur Erkennung der Tischposition. Daher muss der Tisch zurück in seine Referenzposition gefahren werden, nachdem die Spannung eingeschaltet wird, um die Referenzposition einzustellen. Es gibt drei Methoden für die [Rückkehr zur Referenzposition] (Return to origin position), wie unten dargestellt. Bei allen drei Methoden wird die Referenzposition (0) im Controller am Steckerende eingestellt. - Seite 46 Beispiel für die Rückkehr zur Referenzposition Befehl zur [Return to Origin position] → Verfahrbewegung in die Richtung der eingestellten Referenzposition → Verfahrbewegung stoppt → Rückwärtsbewegung → Einstellung der Referenzposition Tisch Tisch Referenzposition Führungsschiene Führungsschiene Mechanischer Endanschlag Mechanischer Ursprüngliche Position Endanschlag * Der Controller verwendet den Wert der „bewegten Masse“...
-
Seite 47: Positionierbetrieb
11.2 Positionierbetrieb Die „Positionierung“ wird in [Step data] - [Operation] registriert. Der Positionierbetrieb wird dementsprechend ausgeführt. Bewegung zur Zielposition, die in [Step data] - [Target position] - [Zielposition] eingestellt wurde. - Beispiel für den Positionierbetrieb - Positionierbeispiel [Zykluszeit-Eingabe] Tisch Zielposition Geschwindigkeit Führungsschiene Position... -
Seite 48: Bei Bewegung Des Werkstücks
Anm. 1) Die Schubkraft variiert je nach Umgebungsbedingungen, Schubrichtung und Tischposition. Bei der in den Schrittdaten eingestellten Schubkraft handelt es sich lediglich um einen Nennwert. Der Schub-Sollwert muss nach Bedarf vom Anwender kalibriert werden. Anm. 2) Wenn die max. Geschwindigkeit in der Positionierbetriebsphase 6 mm/s oder weniger beträgt, dann ist die Schubgeschwindigkeit während der gleichmäßigen Schubgeschwindigkeits-Phase gleich der max. -
Seite 49: Absolute Positionierung
11.4 Absolute Positionierung Die Zielposition wird basierend auf der „Referenzposition“ auf der Einfahrseite bestimmt. Siehe Beispiel unten. + direction + direction (+)-Richtung - direction - direction (-)-Richtung [mm] [mm] Dieses Beispiel zeigt die auf 10 mm eingestellte Zielposition. Der Tisch des Card Motors bewegt sich auf 10 mm ausgehend von der Referenzposition. -
Seite 50: Ansprechzeit Für Die Controller-Eingangssignale
11.6 Ansprechzeit für die Controller-Eingangssignale Folgende Faktoren führen zu einer verzögerten Ansprechzeit der Controller-Eingangssignale: (1) Verzögerte Erfassung des Controller-Eingangssignals (2) Verzögerung aufgrund einer Eingangssignal-Analyse (3) Verzögerte Befehlsanalyse Sowohl die SPS- als auch die Controller-Verarbeitung verursachen Verzögerungen. Ein Intervall von min. 2 ms zwischen Eingangssignalen vorsehen und den Signalstatus mindestens 2 ms lang beibehalten. - Seite 51 Für Schubvorgänge die Zielposition min. 1 mm von der Position entfernt einstellen, an der der Tisch oder das Schubwerkzeug in Kontakt mit dem Werkstück kommt. Andernfalls kann der Tisch mit einer Geschwindigkeit auf das Werkstück prallen, die die spezifizierte Schubgeschwindigkeit von 6 mm/s übersteigt, wodurch das Werkstück und der Card Motor beschädigt werden könnten.
-
Seite 52: Betrieb Beispiele Und Prozesse
12. Betrieb Beispiele und Prozesse 12.1 Beispiel für die Rückkehr zur Referenzposition Nachdem Spannung zugeführt wird, kehrt der Tisch in seine Referenzposition zurück. Dies geschieht ausgehend von seiner ursprünglichen Position 5 mm entfernt von der Einfahrseite ohne Last. - Beispiel für die Grundeinstellungen Methode der Rückkehr zur Pos. -
Seite 53: Beispiel Für Den Positionierbetrieb
12.2 Beispiel für den Positionierbetrieb Schritt-Nr. 1: Der Tisch wird von der Einfahrseite innerhalb von 0,2 Sekunden ohne Last auf die absolute Position 5 mm bewegt. Schritt-Nr. 2: Der Tisch wird innerhalb von 0,1 Sekunden von der absoluten Position 5 mm auf die absolute Position 10 mm bewegt. -
Seite 54: Beispiel Für Den Schubbetrieb
12.3 Beispiel für den Schubbetrieb Schritt-Nr. 1: Der Tisch wird von der Einfahrseite innerhalb von 0,5 Sekunden mit einer Last von 500 g auf die absolute Position 9 mm bewegt. Ab dieser Position wird die Geschwindigkeit auf 6 mm/s gebremst. Der Tisch berührt das Werkstück mit dieser Geschwindigkeit und schiebt es mit einem Schub-Sollwert von max. -
Seite 55: Hinweise Zur Bedienung
13. Hinweise zur Bedienung 13.1 Überblick über den Betrieb Der Card Motor wird durch Auswahl der im Controller voreingestellten Schrittdaten unter Verwendung von Digital-I/O-Signalen betrieben. Zur Steuerung des Card Motors mit Parallel-I/O-Signalen, in den Überwachungsmodus schalten oder die Controller-Software ausschalten. Beim Starten der Controller-Software (außer im Überwachungsmodus) bzw. -
Seite 56: Positionierbetrieb
[2] Positionierbetrieb - Vorgehensweise - -Ablaufdiagramm- Der Controller liest die zugeordnete Schrittdaten-Nr. Schrittdaten-Nr. festlegen. i. DRIVE-Eingang ausschalten (OFF) und 24 V IN0 bis IN3 einstellen. Spannung (Die passende Kombination aus high und low Zustand für die Schrittdaten-Nr.- Eingänge IN0~3 festlegen (IN0 bis IN3).) Eingang ・... -
Seite 57: Zurücksetzen Des Alarms
vi. Wenn der DRIVE-Eingang sich ausschaltet (OFF), stoppt der Card Motor den Schubbetrieb und der Tisch verbleibt in der Position. OUT1-Ausgang (INF) schaltet sich aus (OFF). (4) Zurücksetzen des Alarms - Vorgehensweise - -Ablaufdiagramm- (i) Ein Alarm wurde ausgelöst. Zurücksetzen des Alarms (Der ALARM-Ausgang ist OFF.) ↓... -
Seite 58: Card Motor-Controller-Software
14. Card Motor-Controller-Software 14.1 Einstellung der Controller-Software (1) Installation der Software Die Ausführungsdatei „LATC_Configurator.exe“ auf den Computer-Desktop kopieren. Siehe Installationshandbuch für Details. (2) Start-up Durch Doppelklick auf das unten gezeigte Icon für den „LATC_Configurator“ wird das Dialogfeld „Please select COM port No.“ aufgerufen. LATC_Configurator.exe Achtung Sicherstellen, dass der Controller an den Card Motor und an alle Kabel angeschlossen ist. - Seite 59 (4). Zuordnung der Controller-ID Die ID ist im Controller gespeichert. (Werkseitige Einstellung: 1) [Start Search] anklicken, um die ID des Controllers zu suchen, der an den PC angeschlossen ist. Nach Abschluss des Suchvorgangs die ID des Controllers auswählen, der angeschlossen werden soll, und auf [Connect] klicken.
- Seite 60 Achtung Controller mit derselben ID nicht gleichzeitig mit einem PC verbinden. Wenn eine Änderung der Controller-ID erforderlich ist, bitte einen SMC-Ansprechpartner kontaktieren. Eine Einstellsoftware mit der passenden Version für den Controller verwenden. Die Einstellsoftware kann von der folgenden Website herunterladen werden: https://www.smcworld.com/actuator/cardmotor.jsp...
- Seite 61 (5) Auswahl der Eingangsart Wenn das Dialogfeld „Select control signal type“ erscheint, die Schrittdaten-Eingabe-Ausführung wählen. *Wenn die Controller-Eingangsart bereits eingestellt ist, wird diese Maske nicht angezeigt. Wenn die Eingangsart geändert werden muss, den Controller initialisieren und erneut Spannung zuführen (siehe hierzu Abschnitt 14.6 Bestätigung der Version und Initialisierung (S. 74)). (6) Hauptfenster i.
-
Seite 62: Fenster Für Die Einstellung Der Grundparameter
14.2 Fenster für die Einstellung der Grundparameter Die Einstellung der Grundparameter des Antriebs (Card Motor) registrieren. Bei einem fehlerfreien Anschluss des Controllers werden die im Controller registrierten Daten direkt nach dem Start der Software im Fenster „Basic Parameter Set up“ angezeigt. Wird die Taste [Setup] gewählt, nachdem einer der Parameter geändert wurde, werden die Einstellwerte in dem Controller gespeichert, der mit dem PC verbunden ist. - Seite 63 v. Comm (Kommunikation) Wird die Kommunikation unterbrochen, während die Controller-Software aktiv ist, kann die Kommunikation durch Klicken auf die „Comm“-Schaltfläche wiederhergestellt werden. Die Kommunikation kann jedoch erst dann wieder hergestellt werden, wenn die Ursache für die Unterbrechung der Kommunikation behoben ist. vi.
-
Seite 64: I/O-Einstellfenster
14.3 I/O-Einstellfenster Die Parallel-I/O-Signale können geprüft und die Ausgangssignal-Funktionen konfiguriert werden. [I/O-Einstellfenster] ⅰ. I/O-Status Zeigt den momentanen Eingangs-und den Ausgangssignal-Status an. Bestätigen, dass die Eingangssignale entsprechend den Signalen ON und OFF schalten, die aus dem Gerät ausgegeben werden, das an den Paralleler I/O-Stecker angeschlossen ist. ⅱ. - Seite 65 iii. AREA-Range Die Positionierbereiche für die AREA-Ausgangssignale können konfiguriert werden. Für bis zu zwei Ausgänge können individuelle Positionierbereiche eingestellt werden: „AREA A“ und „AREA B“. Die Auflösung der Einstellungen für „Position 1“ und „Position 2“ variiert je nach Card Motor-Modell. Card Motor-Ausführung Auflösung LAT3-*...
-
Seite 66: Schrittdaten-Einstellfenster
14.4 Schrittdaten-Einstellfenster Der Betrieb des Antriebs (Card Motor) kann mit bis zu 15 Arbeitsprozessen (Schritten) durchgeführt werden. Wenn [Upload] (Hochladen) ausgeführt wird, werden die verwendbaren im Controller registrierten Daten in der Listenansicht angezeigt. Wenn [Download] (Herunterladen) nach einer Änderung der Einstellung ausgeführt wird, werden die Einstellwerte an den Controller gesendet, der an den PC angeschlossen ist. - Seite 67 a) Operation Wahl zwischen [Position] (Positionierbetrieb) oder [Pushing] (Schubbetrieb) (Die Taste des gewählten Betriebsmodus erscheint grau.) Bei Wahl des [Positionierbetriebs] kann kein [Schub-Sollwert] eingegeben werden. Bei Wahl des [Schubbetriebs] kann ein [Schub-Sollwert] eingegeben werden. b) Movement MOD (Move MOD) „Absolute“ für absolute Positionierung und „Relative“ für relative Positionierung anklicken. Absolute: Der absolute Abstand ausgehend von der Referenzposition.
- Seite 68 g) Decel Einstellung der Abbremsung, um ausgehend von der [Geschwindigkeit] den Stopp zu erreichen. Der Einstellbereich liegt zwischen 1 und 60000 mm/s Die Abbremsung kann eingegeben werden, wenn [Speed Entry Method] in [Step Data Input Method] im Fenster für die „Einstellung der Grundparameter“ ausgewählt wurde. Die Abbremsung kann in Schritten von 1 mm/s eingestellt werden.
- Seite 69 Get Posn (Position) Die aktuelle Position des Card Motor-Tisches kann gelesen werden. Der gelesene Wert wird als „Zielposition“ eingestellt. * Dieser Vorgang gilt nur für Schrittdaten, bei denen der Betriebsmodus auf „absolute Positionierung“ eingestellt ist. Die aktuelle Tischposition des Card Motors wird bei Schrittdaten, deren Betriebsmodus auf „relative Positionierung“...
-
Seite 70: Überwachungs-/Test-Fenster
14.5 Überwachungs-/Test-Fenster Dieses Fenster dient der Überwachung des Eingangs- und Ausgangsstatus des Controllers, wenn dieser an eine SPS angeschlossen ist und der Ausführung von Betriebstests des Card Motors unter Verwendung der eingestellten Schrittdaten. viii [Überwachungs-/Test-Fenster] i. Statusanzeige Aktueller Parallel-I/O-Status, aktuelle Schrittdaten-Nr., Position, Geschwindigkeit und Schubkraft werden auf dem Computer angezeigt (nach Abschluss der Rückkehr zur Referenzposition). - Seite 71 iii. Test mode/Monitor mode Durch Umschalten in den Überwachungsmodus (Monitor Mode) ist es möglich, den Card Motor über externe I/O-Signale zu betreiben und den Betriebsstatus zu überwachen. (Im Überwachungsmodus kann der Betrieb nicht mit der Controller-Software gesteuert werden.) Vor dem Umschalten in den Überwachungsmodus alle Eingangssignale auf OFF schalten. Sobald in den Überwachungsmodus umgeschaltet wurde, muss vor der Verwendung mit Hilfe der SPS eine Rückkehr zur Referenzposition ausgeführt werden.
- Seite 72 viii. Step Data operation Die Schrittdaten können durch Auswahl der Schrittdaten-Nr. und Drücken der Taste [Operation Start] zum Start des Betriebs und [Operation End (Stop)] zum Beendigen des Betriebs ausgeführt werden. [Operation Start] entspricht dem DRIVE-Signal ON und [Operation End (Stop)] entspricht dem DRIVE-Signal OFF.
- Seite 73 d) Operating Time Einstellung der zulässigen Zeit, in der der Controller den Schrittdaten-Betrieb durchführen muss (kleinste Einheit: 0,1 Sekunde). Der nächste Schritt wird ausgeführt, sobald der Controller geantwortet hat, dass der vorherige Schritt abgeschlossen und die eingestellte Betriebsdauer abgelaufen ist. Für die einzelnen Schritte muss eine Betriebsdauer eingegeben werden, die länger ist als die Zeit, die für den Abschluss des Schrittdaten-Betriebs benötigt wird und die kleiner oder gleich 60,0 Sekunden ist.
- Seite 74 Achtung Wenn die „Betriebsdauer“ auf 0,2 Sekunden oder weniger eingestellt wird, wird das Parallel-I/O-Signal, die ausgeführte Schrittdaten-Nr. oder die Position bedingt durch die Kommunikation nicht angezeigt. Wenn ein Alarm erzeugt wird Wenn die [ALM]-LED vorne am Controller rot leuchtet oder blinkt, wurde ein Alarm ausgelöst. LED[PWR]: Grün Ein SVON-Reset ausführen, um den Alarm zu LED[ALM]: Rot...
-
Seite 75: Bestätigung Der Version Und Initialisierung
14.6 Bestätigung der Version und Initialisierung Die Version der Konfigurationssoftware kann durch Anklicken des Icons in der oberen linken Ecke der Titelleiste und Wahl von „About(A)...“ abgefragt werden. Das Fenster mit Informationen zur Version wird angezeigt. Die Controller-Version wird durch Klicken auf die Taste „Details“ angezeigt. Durch Klicken auf die Taste [Initialize] wird der Controller initialisiert und auf die werkseitigen Einstellungen zurückgesetzt. -
Seite 76: Optionen
15. Optionen 15.1 I/O-Kabel ( 1) Bestellschlüssel I/O-Kabel (2) Parallel-I/O Kabel-Anschlussklemmen LATH * - * LATH2-* LATH5-* Klemmen- Isolierungs- Isolierungs- nummer Punkt Punkt-Farbe farbe farbe Kabellänge [L] *LE -CP-1 hellbraun Grau Schwarz Grau gelb Grau Schwarz Grün hellgrün Grau Schwarz Grau grau Grau... -
Seite 77: Counter-Kabel
15.2 Counter-Kabel (1) Bestellschlüssel L A T H 3 - 1 Kabellänge (L) (2) Abmessungen Controller-Seite Multi-Counter-Seite 3 Verdrahtungsschema Klemmen- Signalbe- Isolierungs- Terminal Signal Insulation Counter-Stecker zeichnung farbe name colour Phase B Weiß PhaseB White White Weiß Blue Blau PhaseA Phase A Black Schwarz... -
Seite 78: Controller-Einstellset
15.3 Controller-Einstellset (1) Bestellschlüssel Controller-Einstellset LATC-W2 Kommunikationskabel Controller-Einstellset Controller-Software (2) Inhalt des Sets USB-Kabel (i) Controller-Software (CD-ROM) LATC-W2-S (ii) Controller-Einstellkabel (Kommunikationskabel und USB-Kabel) Kommunikationskabel: LEC-W2-C USB-Kabel: LEC-W2-U (3) Umgebungsbedingungen ® ® ® IBM PC/AT Wandler mit Windows 7 (32 bit), Windows 7 (64 bit), Windows 8.1 (32 bit) oder ®... -
Seite 79: Multi-Counter Ceu5
15.4 Multi-Counter CEU5 Siehe Betriebsanleitung des Multi-Counters der Serie CEU5 für nähere Details. (1) Bestellschlüssel Multi-Counter □ □ □ CEU5 - Versorgungsspannung LE -CP-1 100 VAC bis 240 VAC 24 VDC Externer Ausgang RS-232C RS-232C + BCD Ausgangstransistor NPN offener Kollektor Ausgang PNP offener Kollektor Ausgang (2) Technische Daten CEU5**-*... -
Seite 80: Abmessungen
(3) Abmessungen BCD-Ausgangsanschluss (4) Verdrahtungsschema Klemmenleiste des Terminal block of the Multi-Counters CEU5 CEU5 Multi-counter Counter plug for the Counter-Stecker für Insulation den Controller LATC4 Bezeichn- Isolierungs- Name LATC4 controller colour farbe Insulation Isolierungs- Name Bezeichnung farbe colour Schwarz Black Weiß... - Seite 81 (5) Bedienung Beim Ausführen der Schrittdaten-Nr. 0 (Rückkehr zur Referenzposition) wird das Reset-Signal aus dem Controller ausgegeben, nachdem [Return to Origin Position] abgeschlossen ist. Mit diesem Prozess wird der CEU5 zurückgesetzt und die Position wird sowohl im Controller als auch im Multi-Counter auf Null gesetzt.
-
Seite 82: Alarmabfrage
16. Alarmabfrage Die Alarmart kann anhand der Kombination des Einschalt- oder Blink-Status der ALM- und PWR-LEDs abgefragt werden. Wenn ein Alarm erzeugt wird, führen Sie zunächst eine Fehlersuche durch und beheben Sie den Fehler, bevor Sie den Alarm deaktivieren. Siehe hierzu Kapitel „16.2 Alarme und Gegenmaßnahmen“ (S.82). Es gibt zwei Alarmtypen. -
Seite 83: Alarme Und Gegenmaßnahmen
16.2 Alarme und Gegenmaßnahmen Wiederhers- Alarmbe- tellungs- Alarminhalt / Gegenmaßnahme zeichnung methode <Fehlerinhalt> Interner Speicherfehler. Prüfen, ob die unten beschriebenen Bedingungen zutreffen. Spannungsversor (1) Unterbrechung der Spannungsversorgung während des Speicherns der gung Memory error Daten. OFF und wieder (2) Unterbrechung der Versorgungsspannung. (3) Rauschen aufgrund gekreuzter Kabel und Stromleitungen. - Seite 84 <Fehlerinhalt> Die Einstellung der Grundparameter und die Schrittdaten-Einstellung sind nicht korrekt. Prüfen, ob die unten beschriebenen Bedingungen zutreffen. (1) Referenzposition-Parameterfehler Fehler in Bezug auf die Daten der Grundparameter - [Card Motor product number] wurde nicht gewählt. Parameter error (2) Fehler Schrittdatenparameter Spannungsversor (Origin parameter Fehler in Bezug auf die Schrittdaten - „Zielposition“...
-
Seite 85: Vorsichtsmaßnahmen Für Controller Und Peripheriegeräte
Spannungszufuhr für das Produkt und das System abzuschalten. Achtung 1. SMC-Produkte sind nicht für den Einsatz als Geräte im gesetzlichen Messwesen bestimmt. Die von SMC gefertigten bzw. vertriebenen Messgeräte wurden keinen Prüfverfahren zur Typgenehmigung unterzogen, die von den Messvorschriften der einzelnen Länder vorgegeben werden. - Seite 86 Zielposition angehalten hat, ist es je nach Betriebsbedingungen möglich, dass der Card Motor innerhalb des Positioniergenauigkeitsbereichs kontinuierlich nach der Zielposition sucht (Vibration). Bitte setzen Sie sich mit einem SMC-Ansprechpartner in Verbindung, um dies zu verbessern. 6. BUSY-Ausgangssignal Das BUSY-Ausgangssignal schaltet auf ON, wenn der Card Motor den Betrieb startet, und es schaltet auf OFF, wenn die Geschwindigkeit 2 mm/s oder weniger erreicht.
-
Seite 87: Installation
17.3 Installation Warnung 1. Den Controller und die Peripheriegeräte auf feuerfestem Material installieren. Bei einer direkten Installation auf bzw. in der Nähe von entzündlichem Material kann ein Brand entstehen. 2. Das Produkt nicht an einem Ort installieren, an dem es Vibrations- und Stoßkräften ausgesetzt ist. Es kann zum Produktausfall und Fehlfunktion kommen. -
Seite 88: Verdrahtung
2. Einen separaten Erdungsanschluss verwenden. Erdung der Klasse D verwenden. (Erdungswiderstand maximal 100 Ω) 3. Der Erdungsanschluss sollte so nah wie möglich am Controller liegen und die Erdungskabel sollten so kurz wie möglich sein. 4. Für den eher unwahrscheinlichen Fall, dass der Erdungsanschluss Fehlfunktionen verursacht, kann er entfernt werden. -
Seite 89: Wartung
6. Nicht in Umgebungen einsetzen, in denen Spannungsspitzen auftreten. Wenn sich Geräte, Spannungsspitzen erzeugen elektromagnetische Heber, Hochfrequenzinduktionsöfen, Motoren usw.) in der Nähe des Sensors befinden, kann dessen innerer Schaltkreis beschädigt oder zerstört werden. Keine Erzeuger von Spannungsspitzen verwenden und auf ordnungsgemäße Verdrahtung achten. -
Seite 90: Fehlersuche
Teils wieder aufgenommen werden kann, ist davon auszugehen, dass der Fehler im Produkt liegt. Das Produkt kann u. U. durch die Betriebsbedingungen (Probleme mit der Anwendung) beschädigt werden. Bitte setzen Sie sich mit SMC in Verbindung, um geeignete Maßnahmen zu besprechen. 18.1 Betriebsfehler Mögliche... - Seite 91 Prüfen, ob der Controller einen Alarm Siehe Betriebsanleitung des Controllers und Alarm wird erzeugt hat. treffen Sie entsprechende Maßnahmen. erzeugt Alarmtyp prüfen. → 16. Alarmabfrage (S. 81 F) Verdrahtung korrigieren und prüfen, ob der Eingangs-/Ausgangsanschluss der einzelnen Korrekte Verdrahtung prüfen. Signale korrekt ist.
- Seite 92 Der Card Prüfen, ob sich ein Element gelöst hat Den Card Motor und das Werkstück sicher Motor oder und sicherstellen, dass der Card Motor festziehen. Siehe Betriebsanleitung des Card korrekt montiert ist und dass das Motors LAT3 für Details zu den Werkstück korrekt am Card Motor-Tisch Werkstück Anzugsdrehmomenten und zur Fixierung.
-
Seite 93: Fehler Bei Position-Geschwindigkeit-Schubkraft
18.2 Fehler in Position-Geschwindigkeit-Schubkraft Mögliche Suchmethode und Identifizierung Fehler Gegenmaßnahmen Ursache möglicher Ursachen Prüfen, ob der Card Motor-Tisch die Verfahrbewegung zur Referenzposition abschließen kann, wenn die Rückkehr zur Falsche Referenzposition sowohl in Ausfahr- als Den Antriebsbetrieb prüfen (auf Fremdkörper Referenzpo- auch in Einfahrrichtung ausgeführt wird. - Seite 94 Die Spannungsversorgung aus- und wieder Prüfen, ob die Daten (Schrittdaten, einschalten. Die korrekten Daten erneut Die Daten Parameter) korrekt gespeichert werden. eingeben (Schrittdaten, Parameter) und den wurden nicht Die Controller-Spannungsversorgung Betrieb prüfen. korrekt nicht abschalten und das Kabel nicht → 3.2 Bauteile (S. 16) gespeichert.
-
Seite 95: Konfigurationssoftware
18.3 Konfigurationssoftware Suchmethode und Mögliche Ursache Problem Identifizierung möglicher Gegenmaßnahmen für die Fehlfunktion Ursachen COM-Anschluss Den Controller mit Hilfe des deaktiviert oder Kommunikationskabel Prüfen, ob das Controller-Einstellkabels und des COM-Anschluss nicht an PC Kommunikationskabel an den USB-Kabels am PC anschließen und die kann nicht angeschlossen. - Seite 96 Tel.: + 81 3 5207 8249 Fax: +81 3 5298 5362 http://www.smcworld.com Anm.: Die Angaben können ohne vorherige Ankündigung, und ohne dass daraus eine Verpflichtung für den Hersteller entsteht, geändert werden. © 2014 SMC CORPORATION Alle Rechte vorbehalten - 95 -...