SCHUNK NSR mini 100 Originalbetriebsanleitung

Verwandte Anleitungen für SCHUNK NSR mini 100


Inhaltszusammenfassung für SCHUNK NSR mini 100
- Seite 1 Original Betriebsanleitung VERO-S Roboterkupplung für Palettenhandling NSR mini 100 / PKL mini 100 Montage- und Betriebsanleitung Superior Clamping and Gripping...
- Seite 2 Impressum Impressum Urheberrecht: Diese Anleitung ist urheberrechtlich geschützt. Urheber ist die SCHUNK GmbH & Co. KG. Alle Rechte vorbehalten. Insbesondere ist jegliche – auch auszugsweise – Vervielfältigung, Bearbeitung, Verbreitung (Zugänglichmachung gegenüber Dritten), Übersetzung oder sonstige Verwendung verboten und bedarf unserer vorherigen schriftlichen Genehmigung.
-
Seite 3: Inhaltsverzeichnis
Inhaltsverzeichnis Inhaltsverzeichnis 1 Allgemeines ......................5 1.1 Darstellung der Warnhinweise ................. 5 1.2 Mitgeltende Unterlagen ................... 6 2 Grundlegende Sicherheitshinweise ................7 2.1 Bestimmungsgemäße Verwendung ................. 7 2.2 Nicht bestimmungsgemäße Verwendung ..............7 2.3 Hinweise auf besondere Gefahren ................8 2.4 Hinweise zum sicheren Betrieb ................ - Seite 4 Inhaltsverzeichnis 9 Dichtsatz- und Stücklisten ..................37 9.1 Dichtsatzliste ......................37 9.2 Stücklisten ......................37 10 Zusammenbauzeichnung ..................39 11 Sensoren ......................... 40 12 Einbauerklärung ...................... 44 13 Anlage zur Einbauerklärung ..................45 06.00|0489030_NSR mini 100 _PKL mini 100 |de...
-
Seite 5: Allgemeines
Allgemeines Allgemeines Diese Betriebsanleitung ist integraler Bestandteil des Produktes und enthält wichtige Informationen zur sicheren und richtigen Montage, Inbetriebnahme, Bedienung, Pflege, Wartung und Entsorgung. Diese Anleitung ist für alle Anwender jederzeit zugänglich in unmittelbarer Nähe des Produktes aufzubewahren. Vor der Benutzung des Produktes diese Anleitung, besonders das Kapitel "Grundlegende Sicherheitshinweise"... -
Seite 6: Mitgeltende Unterlagen
Allgemeines ACHTUNG Sachschaden! Informationen zur Vermeidung von Sachschäden. Mitgeltende Unterlagen • Allgemeine Geschäftsbedingungen * • Katalogdatenblatt des gekauften Produkts * Die mit Stern (*) gekennzeichneten Unterlagen können unter schunk.com heruntergeladen werden. 06.00|0489030_NSR mini 100 _PKL mini 100 |de... -
Seite 7: Grundlegende Sicherheitshinweise
Eine nicht bestimmungsgemäße Verwendung der VERO-S Roboterkupplung für Palettenhandling liegt z.B. vor: • wenn es als Lastaufnahmemittel oder als Hebezeug verwendet wird. • wenn es bei Drehanwendung, ohne Rücksprache mit SCHUNK, eingesetzt wird. • wenn es in nicht zulässigen Arbeitsumgebungsbedingungen eingesetzt wird. -
Seite 8: Hinweise Auf Besondere Gefahren
Grundlegende Sicherheitshinweise Hinweise auf besondere Gefahren • Bei Montage-, Umbau-, Wartungs- und Einstellarbeiten die Energiezuführungen unterbrechen und sicherstellen, dass im System keine Restenergie vorhanden ist. • Keine Teile von Hand bewegen, wenn die Energieversorgung angeschlossen ist. • Wartungsarbeiten, Umbauten oder Anbauten außerhalb der Gefahrenzone durchführen. - Seite 9 Grundlegende Sicherheitshinweise WARNUNG Verletzungsgefahr des Bedienungspersonals durch die Bewegung des Roboterarms. Verletzungsgefahr durch unkontrollierte Bewegungen während der Einrichtung der Roboterkupplung und während des Betriebs. • Während der Einrichtung der Roboterkupplung muss ein versehentliches Betätigen des Roboterarms durch geeignete Gegenmaßnahmen ausgeschlossen werden. •...
-
Seite 10: Hinweise Zum Sicheren Betrieb
Grundlegende Sicherheitshinweise VORSICHT Verbrennungsgefahr durch Werkstücke mit hoher Temperatur! • Beim Entnehmen der Werkstücke Schutzhandschuhe tragen. • Automatische Beladung bevorzugen. VORSICHT Gefährdung durch Lärmentwicklung! Physische und psychische Belastungen durch Lärmentwicklung während des Bearbeitungsprozesses. • Gehörschutz tragen. Hinweise zum sicheren Betrieb Gefahren für Personen (Verletzungsgefahr) und Sachschäden können von der Roboterkupplung ausgehen, wenn sie z.B.: •... -
Seite 11: Haltekraft Und Schraubenfestigkeit
Umgebung. Soll die Roboterkupplung in einer Umgebung mit abrasiven Stäuben oder ätzenden bzw. aggressiven Dämpfen bzw. Flüssigkeiten betrieben werden, so ist vorher die Genehmigung der Fa. SCHUNK einzuholen. Sicherheit bei Montage und Instandhaltung Bei der Montage, beim Anschließen, Einstellen, Inbetriebnehmen und Testen muss sichergestellt sein, dass ein versehentliches Betätigen der Roboterkupplung durch den Monteur oder andere... -
Seite 12: Personalqualifikation
Grundlegende Sicherheitshinweise Personalqualifikation Die Montage und Demontage, die Inbetriebnahme, der Betrieb und die Instandhaltung des Produkts darf nur von befähigtem und sicherheitstechnisch unterwiesenem Fachpersonal durchgeführt werden. Allen Personen, die mit der Bedienung, Wartung und Instandsetzung des Produkts beauftragt sind, muss die Betriebsanleitung, insbesondere das Kapitel "Grundlegende Sicherheitshinweise"... -
Seite 13: Verwendung Von Persönlichen Schutzausrüstungen
Grundlegende Sicherheitshinweise Ersatzteile Nur Original SCHUNK Ersatzteile verwenden. Umweltschutzvorschriften Bei allen Wartungs- und Instandsetzungsarbeiten müssen die gültigen Umweltschutzvorschriften eingehalten werden. Verwendung von persönlichen Schutzausrüstungen Bei Verwendung dieses Produktes die einschlägigen Arbeitsschutzbestimmungen beachten und die erforderlichen persönlichen Schutzausrüstungen (PSA), mindestens Kategorie 2, verwenden! 06.00|0489030_NSR mini 100 _PKL mini 100 |de... -
Seite 14: Gewährleistung
• Beachten der vorgeschriebenen Wartungs- und Pflegehinweise ( 7, Seite 34) Werkstückberührende Teile und Verschleißteile sind nicht Bestandteil der Gewährleistung. Lieferumfang • Roboterkupplung für Palettenhandling NSR mini 100 • Montage- und Betriebsanleitung • Beipack 2 Passschrauben 8f7 / M6 3 Befestigungsschrauben M6 x 25 2 O-Ringe Ø... -
Seite 15: Technische Daten
Die Kraftrichtungen für die maximal zulässigen Drehmomente sind aus der Abbildung im Kapitel "Koppelschnittstelle" ersichtlich ( 6.4, Seite 27). Die Roboterkupplung NSR mini 100 ist vorbereitet für die Überwachung des Systemzustandes. • Abfrage GEÖFFNET und GESPANNT mit 2 Magnetschaltern MMS 22-SA (zur separaten Bestellung) •... -
Seite 16: Berechnung Der Zulässigen Transportlast
Unfällen und zu Beschädigungen am Spannsystem kommen. Rechenbeispiel zur Ermittlung der zulässigen Transportlast Fehlende Informationen oder Angaben können vom Hersteller angefordert werden! Maximal zulässiges Drehmoment beim NSR mini 100: M = 75 Nm Legende Drehmoment Kraft Wirksame Hebellänge ab der Koppelschnittstelle zwischen... - Seite 17 Technische Daten Berechnung der Beschleunigungskraft: Maximal zulässiges Drehmoment beim NSR mini 100: M = 75 Nm Ergebnis der Berechnung: Unter Berücksichtigung der Roboterbeschleunigung ist das im Berechnungsbeispiel ermittelte Beladegewicht zulässig. Ein höheres Beladegewicht erfordert eine Verkürzung der wirksamen Hebellänge von der Koppelschnittstelle bis zum Schwerpunkt der Last, oder eine Reduzierung der Roboterbeschleunigung.
-
Seite 18: Montage
Montage Montage Maßnahmen vor Montagebeginn Das Produkt vorsichtig (z.B. mit geeignetem Hebezeug) aus der Verpackung heben. VORSICHT Verletzungsgefahr durch scharfe Kanten und durch raue oder rutschige Oberflächen. • Persönliche Schutzausrüstung, insbesondere Schutzhandschuhe, verwenden. Die Lieferung auf Vollständigkeit und Transportschäden überprüfen. Montage der Roboterkupplung Die Montage, Demontage und Umbauarbeiten der Roboterkupplung dürfen nur von Fachpersonal durchgeführt... -
Seite 19: Schrauben-Anzugsdrehmomente
Montage Schrauben-Anzugsdrehmomente Schrauben-Anzugsdrehmomente für die Befestigung der Senkkopfschraube zwischen Palettenkupplung und der Spannpalette (außer Verschraubung des Spannbolzens und der Zugschrauben zur Spannpalette). (Schrauben-Qualität 10.9) Schraubengröße Schrauben-Anzugsdrehmomente (Nm) Schrauben-Anzugsdrehmomente für die Befestigung der Roboterkupplung auf dem Roboterflansch. Schrauben- Anzugsdrehmomente für die Befestigung des Nullpunkt- Spannbolzens an der Palettenkupplung und der Zugschrauben zur Spannpalette. -
Seite 20: Befestigung Und Anschluss
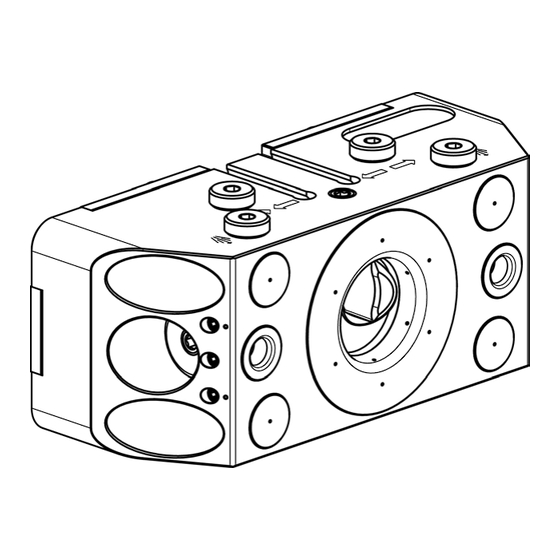
Montage Befestigung und Anschluss Bei Selbsteinbau bitte unsere Einbauzeichnungen anfordern. Das NSR mini 100 wird im Einbauraum durch 5 Schrauben M6 befestigt. Zur genauen Positionierung der Roboterkupplung auf dem erforderlichen Roboterflansch sind zwei Befestigungsschrauben als Passschrauben ausgeführt. Eine genaue Ausrichtung und Positionierung der Roboterkupplung erfordert eine hochgenaue Positionierung der gegenüberliegenden Passbohrungen Ø... - Seite 21 Montage Befestigung 06.00|0489030_NSR mini 100 _PKL mini 100 |de...
- Seite 22 Den axialdichtenden O-Ringsitz nach folgendem Maß fertigen: Ø 6 + 0.1 x 0.8 + 0.05 . Im Beipack des NSR mini 100 sind die O-Ringe Ø 3 x 1.5 (siehe Kapitel "Zusammenbauzeichnung", Pos. 19 ‚ ( 10, Seite 39)) zur Abdichtung der bodenseitigen schlauchlosen Direktanschlüsse enthalten.
- Seite 23 Montage Befestigung und Anschlüsse 06.00|0489030_NSR mini 100 _PKL mini 100 |de...
-
Seite 24: Entriegelungsanschluss
Montage 6.3.1 Entriegelungsanschluss Wird der Entriegelungsanschluss der Roboterkupplung mit Druckluft beaufschlagt, wird das Spannsystem entriegelt. Die Spannpalette kann über die adaptierte Palettenkupplung aus der Spannstation entnommen oder eingesetzt werden. Es besteht die Möglichkeit die Roboterkupplung wahlweise über die seitliche Luftanschlussbohrung M5 oder einen bodenseitigen schlauchlosen Direktanschluss anzusteuern. -
Seite 25: Sperrluftanschluss Mit Reinigungsfunktion
Roboterkupplung an die Palettenkupplung empfehlenswert. Dabei werden beide zu koppelnden Systemkomponenten von Schmutz und Spänen gereinigt. Bei der Ansteuerung der Roboterkupplung NSR mini 100 ist zu beachten: • Max. Druck der Sperrluft: 6 bar • Die Sperrluft muss unmittelbar bevor die Palettenkupplung vollständig im Robotermodul verriegelt wird wieder... -
Seite 26: Pneumatik-Schaltplan
Montage 6.3.4 Pneumatik-Schaltplan Pneumatik-Schaltplan 06.00|0489030_NSR mini 100 _PKL mini 100 |de... -
Seite 27: Koppelschnittstelle
Montage Koppelschnittstelle Die Roboterkupplung NSR mini 100 verfügt über zwei unterschiedliche Lageorientierungshilfen für die Palettenkupplung. Die Anbauschnittstelle für die Spannpalette ist dabei bei beiden Ausführungen der Palettenkupplungen identisch. Verdrehsicherung Variante I Hierbei erfolgt die Lageorientierung der Palettenkupplung zum Robotermodul über die schrägen Anlageflächen. Die Keilschrägen an der Palettenkupplung zentrieren sich beim Zusammenfügen... -
Seite 28: Palettenkupplung Pkl Mini 100
19)). Die Palettenkupplung muss zwingend eine vollflächig Plananlage an den Auflagestellen der Roboterkupplung gewährleisten. Konstruktive Änderungen an der Palettenkupplung seitens des Betreibers sind nur mit Zustimmung der Firma SCHUNK zulässig. 6.4.1 Palettenkupplung PKL mini 100 Palettenkupplung PKL mini 100 Die Palettenkupplung PKL mini 100 (Ident-Nr. 0471970) wurde als Paletten-Wechselschnittstelle für die Roboterkupplung NSR mini... - Seite 29 Montage Außenliegende Formschrägen dienen beim Fügen mit dem Robotermodul zur spielfreien Lageorientierung. Die Palettenkupplung stellt die Verbindung zur Spannpalette her. Die Schnittstelle der Roboterkupplung verfügt über eine Auflagefläche und drei Befestigungsschrauben zur Adaption der Spannpalette. Zwei lange Zylinderschrauben dienen als Zugschrauben und gewährleisten eine hohe Haltekraft und Steifigkeit bei schweren Beladegewichten.
-
Seite 30: Toleranzen Und Einbaubedingungen Für Spannbolzen Spa Mini 20 In Kundenspezifische Palettenkupplung
Montage HINWEISE An der Palettenkupplung darf ausschließlich ein original SCHUNK Spannbolzen mit der dafür vorgesehenen Befestigungsschraube am Befestigungsgewinde M8 montiert werden. Ersatzlieferung ist bei SCHUNK erhältlich. In regelmäßigen Abständen die Verschraubung des Spannbolzens der Palettenkupplung auf sicheren Halt überprüfen. Bei kundenspezifischem Eigenbau von Palettenkupplungen ist die volle Abstützung an der Planfläche der Roboterkupplung zu... -
Seite 31: Anwendungsbeispiel Für Die Automatisierte Palettenbeladung
> 8 > 13 > 9 Anwendungsbeispiel für die automatisierte Palettenbeladung Das Spannsystem NSR mini 100 wurde zur automatisierten Palettenbeladung mit Industrierobotern für kleine bis mittlere Traglasten konzipiert. Die Roboterkupplung ist mit dem Handlingsystem die Schnittstelle zwischen Maschinenarbeitsraum und Palettenspeicherregal. -
Seite 32: An- Und Abkoppeln Von Transportlasten
Montage Anwendungsbeispiel für die automatisierte Palettenbeladung 6.6.1 An- und Abkoppeln von Transportlasten Beim automatisierten An- und Abkoppeln von Transportlasten muss beachtet werden: • Die Koppelschnittstellen zwischen Robotermodul und Roboterkupplung oder Spannpalette und Spannstation frühzeitig ohne Neigungswinkel und Mittenversatz anfahren. • Im gesamten Arbeitsraum auf kollisionsfreien Verfahrweg achten. - Seite 33 Montage Automatisiertes An- und Abkoppeln von Transportlasten 06.00|0489030_NSR mini 100 _PKL mini 100 |de...
-
Seite 34: Wartung Und Pflege
Verletzungsgefahr für Personen und Gefahr der Beschädigung der Roboterkupplung beim Öffnen des Gehäusedeckels. Muss die Roboterkupplung zerlegt werden, das Modul zur Reparatur an Firma SCHUNK senden. Der Deckel der Roboterkupplung steht unter Federvorspannung und darf nur durch geschultes Fachpersonal entfernt werden. -
Seite 35: Regelmäßige Kontrolle Der Roboter- Und Palettenkupplung
Wartung und Pflege Regelmäßige Kontrolle der Roboter- und Palettenkupplung Bei der Roboterkupplung sowie der dazugehörige Palettenkupplung PKL muss regelmäßig eine Sichtprüfung auf mögliche Beschädigungen der Komponenten durchgeführt werden. Diese Sichtprüfung muss alle 50 000 Spannzyklen vorgenommen werden. Alle 50 000 Spannzyklen muss an der Roboterkupplung eine Dichtheitsprüfung durchgeführt werden. -
Seite 36: Fehlerbehebung
Luftversorgung überprüfen Mindestdruck unterschritten Betriebsdruck prüfen (mind. 5 bar) Bruch eines Bauteils (z.B. durch Modul erneuern oder zur Reparatur an Firma Überlastung) SCHUNK senden Zuglast auf Spannbolzen zu hoch Auflagegewicht verringern Die Spannstelle entriegelt nicht einwandfrei Mögliche Ursache Maßnahmen zur Behebung Mindestdruck unterschritten Betriebsdruck prüfen (mind. -
Seite 37: Dichtsatz- Und Stücklisten
Dichtsatz- und Stücklisten Dichtsatz- und Stücklisten Dichtsatzliste NSR mini 100 (Ident-Nr. 0471962) Pos. Bezeichnung Menge O-Ring Ø 3 x 1.5 O-Ring Ø 4.5 x 1 O-Ring Ø 11 x 1 O-Ring Ø 3 x 1.5 O-Ring Ø 20 x 1.5 O-Ring Ø... - Seite 38 PKL mini 100 (Ident-Nr. 0471970) Pos. Bezeichnung Menge Adapter NSR mini 100 Spannbolzen SPA mini 20 Schraube DIN EN ISO 4762 M8 x 20 12.9 Schraube DIN EN ISO 4762 M6 x 60 12.9 Senkschraube DIN EN ISO 10642 M6 x 16 Abdeckkappe 06.00|0489030_NSR mini 100 _PKL mini 100 |de...
-
Seite 39: Zusammenbauzeichnung
Zusammenbauzeichnung Zusammenbauzeichnung 06.00|0489030_NSR mini 100 _PKL mini 100 |de... -
Seite 40: Sensoren
Sensoren Sensoren Die Roboterkupplung NSR mini 100 ist für den Einsatz von Magnetschaltern MMS 22-SA und dem induktiven Näherungsschalter IN 50 vorbereitet. • Informationen über die Handhabung von Sensoren unter schunk.com oder bei den SCHUNK-Ansprechpartnern. • Technische Daten der Sensoren sind in den Datenblättern enthalten (im Lieferumfang enthalten bzw. - Seite 41 Sensoren Montage und Einstellung MMS 22-SA Technische Daten: Spannung: 10 – 30 V DC; Verpolschutz Schaltstrom max.: 200 mA Schalthysterese: 0.8 mT Temperaturbereich: – 10°C bis + 70°C Schaltfrequenz ca.: 1000 Hz Spannungsabfall (max. Last): 1.5 V Schutzart nach DIN EN 60529: IP 67* * für die Rundsteckverbindung nur im verschraubten Zustand Montageschritte zur Befestigung der Magnetschalter MMS 22-SA...
- Seite 42 Sensoren • Mit dem Gewindestift den Magnetschalter in dieser Stellung in der Nut verklemmen. • Durch Spannen und Öffnen der Roboterkupplung die Funktion testen. HINWEIS Bei der Spannung mit oder ohne Turbo kann sich der Schaltpunkt des Magnetschalters 2 jeweils minimal verschieben. Montage und Einstellung IN 50 Technische Daten: Spannung:...
- Seite 43 Sensoren Montage der Näherungsschalter 06.00|0489030_NSR mini 100 _PKL mini 100 |de...
-
Seite 44: Einbauerklärung
Europäischen Parlamentes und des Rates über Maschinen zum Zeitpunkt der Erklärung entspricht. Bei Veränderungen am Produkt verliert diese Erklärung ihre Gültigkeit. Produktbezeichnung: VERO-S NSR Roboterkupplung für Palettenhandling NSR mini 100; NSR 160; NSR maxi 220; PKL mini 100; PKL 160; PKL maxi 220 Ident.-Nr. 0471960; 0471915; 0471940; 0471970; 0471920;... -
Seite 45: Anlage Zur Einbauerklärung
Anwendung kommen und für den Umfang der unvollständigen Maschine erfüllt wurden: Produktbezeichnung VERO-S NSR Roboterkupplung für Palettenhandling Typenbezeichnung NSR mini 100; NSR 160; NSR maxi 220; PKL mini 100; PKL 160; PKL maxi 220; Durch den Systemintegrator für die Gesamtmaschine zu leisten ⇓ Ident.-Nr. - Seite 46 Anlage zur Einbauerklärung Risiken durch sonstige Gefährdungen 1.5.1 Elektrische Energieversorgung 1.5.2 Statische Elektrizität 1.5.3 Nichtelektrische Energieversorgung 1.5.4 Montagefehler 1.5.5 Extreme Temperaturen 1.45.6 Brand 1.5.7 Explosion 1.5.8 Lärm 1.5.9 Vibrationen 1.5.10 Strahlung 1.5.11 Strahlung von außen 1.5.12 Laserstrahlung 1.5.13 Emission gefährlicher Werkstoffe und Substanzen 1.5.14 Risiko, in einer Maschine eingeschlossen zu werden 1.5.15...