Beckhoff EL6821 Dokumentation
Ethercat-klemme, 1-kanal kommunikations-interface, dali-2, master/ netzteil

Verwandte Anleitungen für Beckhoff EL6821
















Inhaltszusammenfassung für Beckhoff EL6821
- Seite 1 Dokumentation | DE EL6821 EtherCAT-Klemme, 1-Kanal-Kommunikations-Interface, DALI-2, Master/ Netzteil 10.09.2025 | Version: 1.0.0...
-
Seite 3: Inhaltsverzeichnis
Versionsidentifikation von EtherCAT-Geräten .................. 9 1.5.1 Allgemeine Hinweise zur Kennzeichnung ................ 9 1.5.2 Versionsidentifikation von EL-Klemmen................ 10 1.5.3 Beckhoff Identification Code (BIC) ................... 11 1.5.4 Elektronischer Zugriff auf den BIC (eBIC)................ 13 2 Produktbeschreibung .......................... 15 Einführung ............................ 15 Technische Daten ........................... 16 DALI .............................. 17... - Seite 4 5.1.8 Import/Export von EtherCAT-Teilnehmern mittels SCI und XTI........ 92 Allgemeine Inbetriebnahmehinweise für einen EtherCAT-Slave ............ 99 6 EL6821 - Inbetriebnahme........................ 107 EL6821 - Integration in TwinCAT .................... 107 6.1.1 EL6821 mit CX5120 ....................... 107 Inbetriebnahme EL6821 ........................ 111 EL6821 - Prozessdaten......................... 113 EL6821 –...
-
Seite 5: Vorwort
Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. -
Seite 6: Wegweiser Durch Die Dokumentation
Weitere Bestandteile der Dokumentation Diese Dokumentation beschreibt gerätespezifische Inhalte. Sie ist Bestandteil des modular aufgebauten Dokumentationskonzepts für Beckhoff I/O-Komponenten. Für den Einsatz und sicheren Betrieb des in dieser Dokumentation beschriebenen Gerätes / der in dieser Dokumentation beschriebenen Geräte werden zusätzliche, produktübergreifende Beschreibungen benötigt, die der folgenden Tabelle zu entnehmen sind. -
Seite 7: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 8: Ausgabestände Der Dokumentation
• Erste Veröffentlichung 0.3.0 • Kapitel Technische Daten aktualisiert 0.2.0 • Kapitel Technische Daten aktualisiert • Kapitel DALI aktualisiert • Kapitel Geräte-Diagnosefunktionen aktualisiert • Kapitel EL6821 - Objektbeschreibung und Parametrierung aktualisiert • Dokumentstruktur aktualisiert 0.1.0 • Erster Entwurf Version: 1.0.0 EL6821... -
Seite 9: Versionsidentifikation Von Ethercat-Geräten
Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit Januar 2014 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL2872 mit Revision 0022 und Seriennummer 01200815“. -
Seite 10: Versionsidentifikation Von El-Klemmen
1.5.2 Versionsidentifikation von EL-Klemmen Als Seriennummer/Date Code bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf dem Gerät aufgedruckt oder mit einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand im Auslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nicht die Module innerhalb einer Charge. -
Seite 11: Beckhoff Identification Code (Bic)
Vorwort 1.5.3 Beckhoff Identification Code (BIC) Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff-Produkten zur eindeutigen Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016. Abb. 2: BIC als Data Matrix Code (DMC, Code-Schema ECC200) Die Einführung des BIC erfolgt schrittweise über alle Produktgruppen hinweg. - Seite 12 Entsprechend als DMC: Abb. 3: Beispiel-DMC 1P072222SBTNk4p562d71KEL1809 Q1 51S678294 Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr. 2). Die BTN ist eine eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen Seriennummern- Systeme bei Beckhoff ersetzen wird (z. B. Chargenbezeichungen auf IO-Komponenten, bisheriger Seriennummernkreis für Safety-Produkte, etc.).
-
Seite 13: Elektronischer Zugriff Auf Den Bic (Ebic)
ESI/XML-Konfigurationsdatei für den EtherCAT‑Master bekannt. Zu den Zusammenhängen siehe die entsprechenden Kapitel im EtherCAT‑Systemhandbuch (Link). In das ESI‑EEPROM wird durch Beckhoff auch die eBIC geschrieben. Die Einführung des eBIC in die Beckhoff-IO-Produktion (Klemmen, Box‑Module) erfolgt ab 2020; Stand 2023 ist die Umsetzung weitgehend abgeschlossen. - Seite 14 ◦ Besteht das Gerät aus mehreren Sub-Geräten mit eigener Identität, aber nur das TopLevel‑Gerät ist über EtherCAT zugänglich, steht im CoE‑Objekt‑Verzeichnis 0x10E2:01 die eBIC dieses ESC, in 0x10E2:nn folgen die eBIC der Sub‑Geräte. PROFIBUS-, PROFINET-, DeviceNet-Geräte usw. Für diese Geräte ist derzeit keine elektronische Speicherung und Auslesung geplant. Version: 1.0.0 EL6821...
-
Seite 15: Produktbeschreibung
Abb. 4: EL6821 1-Kanal-Kommunikations-Interface, DALI-2, Master/Netzteil Die EL6821 erlaubt den Anschluss von bis zu 64 DALI‑/DALI‑2‑Slaves und 64 DALI‑2‑Input‑Devices. Mit dem TwinCAT 3 System Manager lässt sich die Konfiguration und Parametrierung von DALI‑Teilnehmern einfach durchführen. Die Programmierung erfolgt ausschließlich über TwinCAT‑3‑Funktionsbausteine. Die EL6821 enthält eine integrierte, abschaltbare DALI-Bus-Stromversorgung. Die galvanisch getrennte Eingangsspannung von 24 V... -
Seite 16: Technische Daten
Produktbeschreibung Technische Daten Kommunikation und Funktion EL6821 Technik DALI‑2 Übertragungskanäle DALI-Slaves / Gruppen max. 64 DALI‑Vorschaltgeräte (control gears) und max. 64 DALI‑Steuergeräte (control devices) / max. 16 Gruppen Übertragungsstandard DALI + DALI‑2 Übertragungsraten 1200 Baud Konfiguration Über TwinCAT 3 System Manager Besondere Eigenschaften • 2 Digital-Eingänge zur vereinfachten Inbetriebnahme;... -
Seite 17: Dali
Standard (IEC 62386) sind die Hersteller von Beleuchtungskomponenten in der Lage, komplexe Beleuchtungsaufgaben einfach und komfortabel zu lösen. Die Busklemmen KL6811 (DALI version-1/DSI) und KL6821/EL6821 (DALI-2) werden in das Busklemmensystem integriert und sind somit feldbusunabhängig. Über den jeweiligen Buskoppler werden die DALI-Daten an die DALI-Geräte weitergeleitet. -
Seite 18: Kommunikation
Produktbeschreibung Pro DALI-Linie können an die KL6821/EL6821 bis zu 64 DALI-Vorschaltgeräte (Control gears) und bis zu 64 DALI-Steuergeräte (Control devices) angeschlossen werden. Die KL6821/EL6821 stellt den DALI-Controller dar und ist pro DALI-Linie einmal vorhanden. An der KL6811 können ausschließlich bis zu 64 DALI/DSI Vorschaltgeräte angeschlossen werden. - Seite 19 Weitere Informationen zu DALI finden Sie auf der Homepage der DALI-Alliance (https://www.dali- alliance.org) und in der Norm IEC 62386. Die KL6811 unterstützt nur die erste Revision des DALI-Standards. Der Betrieb von Steuergeräten (Control Devices) ist mit der KL6811 nicht möglich. EL6821 Version: 1.0.0...
-
Seite 20: Prioritäten
Die meisten Bausteine aus dem Kapitel Part 102 (Vorschaltgeräte) besitzen den Eingang eCommandPriority. Über diesen Eingang wird die Priorität vorgegeben, mit der die DALI-Befehle über die KL6821/EL6821 versendet werden. Ereignisse besitzen ebenfalls eine Priorität (Event priority) und werden durch den Datentyp E_DALIEventPriority dargestellt. -
Seite 21: Bus-Timing
Weder die KL6811 noch die Tc2_DALI-Bibliothek unterstützen Prioritäten für DALI-Befehle. Die Prioritäten sind immer dann von Bedeutung, wenn DALI-Sensoren (Input devices) Ereignisse versenden und parallel dazu DALI-Befehle über die KL6821/EL6821 versendet werden. Sind an einer DALI-Linie nur DALI-Vorschaltgeräte und ein DALI-Controller (KL6821/EL6821) angeschlossen, so sind die Prioritäten der DALI-Befehle von untergeordneter Rolle. -
Seite 22: Übertragungslänge
In der folgenden Tabelle werden die mittleren Übertragungslängen der einzelnen Frames aufgelistet. Daraus ergibt sich eine maximal mögliche Anzahl von Frames pro Sekunde. Das SPS-Programm sollte so ausgelegt werden, dass immer die maximale Anzahl von Frames unterschritten wird. Version: 1.0.0 EL6821... -
Seite 23: Kollisionserkennung
DALI-Gerät 1 begingt danach mit dem erneuten Versenden des DALI-Frames inkl. der Settling time. Ist bei DALI-Gerät 2 die Break-Sequenz beendet, so ist der DALI-Bus von keinem anderen DALI-Gerät belegt (Punkt D). Deshalb wird bei DALI-Gerät 2 die Recover-Sequenz gestartet und anschließend direkt (ohne Settling time) das DALI-Frame erneut versendet. EL6821 Version: 1.0.0... - Seite 24 Die Zeiten in der obersten Zeile (4 ms … 80 ms) geben die Zykluszeit der SPS-Task an, aus der die DALI- Befehle gestartet werden. Die Zeiten (2 ms … 30 ms) in der ersten Spalte geben die Zykluszeit der SPS- Task für die Hintergrundkommunikation an. Version: 1.0.0 EL6821...
-
Seite 25: Zusammenfassung
Speicherbank 0 ist Read Only und beinhaltet allgemeine, herstellerspezifische Informationen über das DALI- Vorschalt- bzw. DALI-Steuergerät. Jedes zertifizierte DALI-Gerät muss die Speicherbank 0 implementieren. Bis zum Offset 16#1A sind die Felder durch die IEC 62386 wie folgt definiert. EL6821 Version: 1.0.0... - Seite 26 Reserviert, nicht implementiert Aufbau der Speicherbank 1: Die Speicherbank 1 kann vom Gerätehersteller genutzt werden, um weiterführende Informationen im DALI- Gerät zu hinterlegen. Bis zum Offset 16#10 sind die Felder durch die IEC 62386 wie folgt definiert. Version: 1.0.0 EL6821...
- Seite 27 Die Speicherbänke 2 bis 199 kann der Gerätehersteller nutzen, um weitere Parameter mitzuliefern. Der Aufbau der Speicherbänke ist immer wie unten dargestellt. Der Inhalt und die Möglichkeit des Beschreibens einzelner Bytes ist beim Hersteller des DALI-Gerätes zu erfragen. EL6821 Version: 1.0.0...
- Seite 28 Speicherbank 0 und die Speicherbank 1 anbieten. Andere DALI-Steuergeräte können über die entsprechenden DALI-Befehle auf diese Speicherbänke zugreifen. Zusätzlich bietet die EL6821 noch die Speicherbank 2 an. In der EL6821 wird die Speicherbank 2 durch das CoE-Objekt 16#8002 abgebildet. Die ersten drei Felder (16#8002:01 ... 16#8002:03) sind durch die IEC 62386 definiert (siehe weiter oben).
- Seite 29 Produktbeschreibung Soll aus einem SPS-Programm heraus auf die Speicherbank 2 der eigenen EL6821 zugegriffen werden, so erfolgt der Zugriff über das EtherCAT CoE-Interface. Die TwinCAT Bibliothek Tc2_EtherCAT bietet hierfür die notwendigen Funktionsblöcke an (siehe FB_EcCoeSdoRead und FB_EcCoeSdoWrite). Das folgende Beispiel liest den Offset 3 (Subindex 4) und schreibt den Offset 4 (Subindex 5) der Speicherbank 2.
-
Seite 30: Dali-2-Strom
Produktbeschreibung 2.3.6 DALI-2-Strom Die DALI-Stromversorgung der EL6821/KL6821 hat einen maximalen Ausgangsstrom von 250 mA und einen garantierten DALI-Strom von 220 mA. Um einen sicheren Betrieb des DALI-Bus zu gewährleisten, dürfen die angeschlossenen DALI-Devices in Summe nie mehr als den garantierten DALI-2-Strom verbrauchen. -
Seite 31: Grundlagen Der Kommunikation
Receiver Data - Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten von Beckhoff sowohl symmetrisch (1:1) belegte als auch gekreuzte Leitungen (Cross-Over) verwendet werden. Empfohlene Kabel Es wird empfohlen, die entsprechenden Beckhoff-Komponenten zu verwenden, z. B. - Kabelsätze ZK1090-9191-xxxx bzw. - Seite 32 Grundlagen der Kommunikation Abb. 6: System Manager Stromberechnung HINWEIS Fehlfunktion möglich! Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepotential erfolgen! Version: 1.0.0 EL6821...
-
Seite 33: Allgemeine Hinweise Zur Watchdog-Einstellung
Ist diese nicht aktiviert, wird nichts herunter geladen und die im ESC befindliche Einstellung bleibt unverändert. • Die heruntergeladenen Werte können in den ESC-Registern 400h, 410h und 420h eingesehen werden: ESC Zugriff -> Speicher (ESC Access -> Memory). EL6821 Version: 1.0.0... - Seite 34 Beschädigung von Geräten und ungewolltes Verhalten des Systems möglich! Bei aktiviertem SM-Watchdog und eingetragenem Wert 0 schaltet der Watchdog vollständig ab! Dies ist die Deaktivierung des Watchdogs! Gesetzte Ausgänge werden dann bei einer Kommunikationsunterbrechung NICHT in den sicheren Zustand gesetzt! Version: 1.0.0 EL6821...
-
Seite 35: Ethercat State Machine
Kanäle der Fieldbus Memory Management Unit (FMMU) und, falls der Slave ein konfigurierbares Mapping unterstützt, das Mapping der Prozessdatenobjekte (PDOs) oder das Sync-Manager-PDO-Assignement. Weiterhin werden in diesem Zustand die Einstellungen für die Prozessdatenübertragung sowie ggf. noch klemmenspezifische Parameter übertragen, die von den Default-Einstellungen abweichen. EL6821 Version: 1.0.0... -
Seite 36: Ausgänge Im Safeop
Im Zustand Boot kann ein Update der Slave-Firmware vorgenommen werden. Der Zustand Boot ist nur über den Zustand Init zu erreichen. Im Zustand Boot ist Mailbox-Kommunikation über das Protokoll File-Access over EtherCAT (FoE) möglich, aber keine andere Mailbox- und Prozessdatenkommunikation. Version: 1.0.0 EL6821... -
Seite 37: Coe-Interface
Prozessor verfügen in der Regel über keine veränderlichen Parameter und haben deshalb auch kein CoE-Verzeichnis. Wenn ein Gerät über ein CoE-Verzeichnis verfügt, stellt sich dies im TwinCAT System Manager als ein eigener Karteireiter mit der Auflistung der Elemente dar: EL6821 Version: 1.0.0... -
Seite 38: Veränderungen Im Coe-Verzeichnis (Can Over Ethercat-Verzeichnis), Programmzugriff
• Startup-Liste führen für den Austauschfall, • Unterscheidung zwischen Online/Offline Dictionary, • Vorhandensein aktueller XML-Beschreibung (Download von der Beckhoff Website), • "CoE-Reload" zum Zurücksetzen der Veränderungen • Programmzugriff im Betrieb über die PLC (s. TwinCAT 3 | PLC-Bibliothek: „Tc2_EtherCAT" und Beispielprogramm R/W CoE) Datenerhaltung und Funktion „NoCoeStorage“... -
Seite 39: Datenerhaltung
Grundlagen der Kommunikation Datenerhaltung Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherweise ausfallsicher im Gerät (EEPROM) gespeichert. D. h. nach einem Neustart (Re Power) sind die veränderten CoE-Parameter immer noch erhalten. Andere Hersteller können dies anders handhaben. - Seite 40 ◦ wird das reale, aktuelle Verzeichnis des Slaves ausgelesen; dies kann je nach Größe und Zykluszeit einige Sekunden dauern. ◦ wird die tatsächliche Identität angezeigt. ◦ wird der Firmware- und Hardware-Stand des Gerätes im CoE angezeigt. ◦ ist ein grünes Online Data zu sehen. Version: 1.0.0 EL6821...
- Seite 41 • Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255 • Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255 • Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255 • ... Allgemein wird dies geschrieben als 0x80n0. Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der Beckhoff Website. EL6821 Version: 1.0.0...
-
Seite 42: Installation
• Beim Umgang mit den Komponenten ist auf eine sachgemäße Erdung der Umgebung (Arbeitsplatz, Verpackung und Personen) zu achten. • Jede Busstation muss auf der rechten Seite mit der Endkappe EL9011 oder EL9012 abgeschlossen werden, um die Schutzart und den ESD-Schutz zu gewährleisten. Abb. 13: Federkontakte der Beckhoff I/O-Komponenten Version: 1.0.0 EL6821... -
Seite 43: Tragschienenmontage
Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befestigung von Tragschienen mit einer Höhe von 7,5 mm unter den Klemmen und Kopplern flache Montageverbindungen wie Senkkopfschrauben oder Blindnieten. HINWEIS Tragschiene erden! Stellen Sie sicher, dass die Tragschiene ausreichend geerdet ist. EL6821 Version: 1.0.0... -
Seite 44: Beschädigung Des Gerätes Möglich
(z. B. Durchschlag zur Erdleitung bei der Isolationsprüfung eines Verbrauchers mit 230 V Nennspannung). Klemmen Sie zur Isolationsprüfung die Erdungszuleitung am Buskoppler bzw. der Einspeiseklemme ab! Um weitere Einspeisestellen für die Prüfung zu entkoppeln, können Sie diese Einspeiseklemmen entriegeln und mindestens 10 mm aus dem Verbund der übrigen Klemmen herausziehen. Version: 1.0.0 EL6821... -
Seite 45: Entsorgung
Gehäuseflächen und ziehen Sie sie aus dem Busklemmenblock heraus. Entsorgung Die mit einer durchgestrichenen Abfalltonne gekennzeichneten Produkte dürfen nicht in den Hausmüll. Das Gerät gilt bei der Entsorgung als Elektro- und Elektronik-Altgerät. Die nationalen Vorgaben zur Entsorgung von Elektro- und Elektronik-Altgeräten sind zu beachten. EL6821 Version: 1.0.0... -
Seite 46: Einbaulagen
Die Einhaltung der Abstände nach Abb. „Empfohlene Abstände bei Standard-Einbaulage“ wird empfohlen. Weitere Einbaulagen Alle anderen Einbaulagen zeichnen sich durch davon abweichende, räumliche Lage der Tragschiene aus, siehe Abb. „Weitere Einbaulagen“. Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zur Umgebung. Version: 1.0.0 EL6821... - Seite 47 Installation Abb. 18: Weitere Einbaulagen EL6821 Version: 1.0.0...
-
Seite 48: Positionierung Von Passiven Klemmen
Stromaufnahme aus dem E-Bus zu erkennen. Um einen optimalen Datenaustausch zu gewährleisten, dürfen nicht mehr als zwei passive Klemmen direkt aneinander gereiht werden! Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt) Abb. 19: Korrekte Positionierung Abb. 20: Inkorrekte Positionierung Version: 1.0.0 EL6821... -
Seite 49: Anschluss
Dadurch verringert sich die Montagezeit und ein Verwechseln der Anschlussdrähte ist ausgeschlossen. Die gewohnten Maße der Klemme ändern sich durch den Stecker nur geringfügig. Der Stecker trägt ungefähr 3 mm auf; dabei bleibt die maximale Höhe der Klemme unverändert. EL6821 Version: 1.0.0... -
Seite 50: Verdrahtung Hd-Klemmen
Federklemmstelle gesteckt werden. Verdrahtung HD-Klemmen Die High-Density-Klemmen der Serien ELx8xx und KLx8xx unterstützen keine steckbare Verdrahtung. Ultraschallverdichtete Litzen Ultraschallverdichtete Litzen An die Standard- und High-Density-Klemmen können auch ultraschallverdichtete (ultraschallverschweißte) Litzen angeschlossen werden. Beachten Sie die Tabellen zum Leitungsquerschnitt [} 52]! Version: 1.0.0 EL6821... -
Seite 51: Verdrahtung
ELxxxx, KLxxxx ESxxxx, KSxxxx Leitungsquerschnitt (massiv) 0,08 ... 2,5 mm 0,08 ... 2,5 mm Leitungsquerschnitt (feindrähtig) 0,08 ... 2,5 mm 0,08 ... 2,5 mm Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 1,5 mm 0,14 ... 1,5 mm Abisolierlänge 8 ... 9 mm 9 ... 10 mm EL6821 Version: 1.0.0... -
Seite 52: Schirmung
0,25 ... 1,5 mm Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 0,75 mm Leitungsquerschnitt (ultraschallverdichtete Litze) nur 1,5 mm (siehe Hinweis [} 50]) Abisolierlänge 8 ... 9 mm 4.6.3 Schirmung Schirmung Encoder, analoge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitungen angeschlossen werden. Version: 1.0.0 EL6821... -
Seite 53: Hinweis Zur Spannungsversorgung
• Durch SELV/PELV-Stromkreise entstehen eventuell weitere Vorgaben aus Normen wie IEC 60204-1 et al., zum Beispiel bezüglich Leitungsabstand und -isolierung. • Eine SELV-Versorgung liefert sichere elektrische Trennung und Begrenzung der Spannung ohne Verbindung zum Schutzleiter, eine PELV-Versorgung benötigt zusätzlich eine sichere Verbindung zum Schutzleiter. EL6821 Version: 1.0.0... -
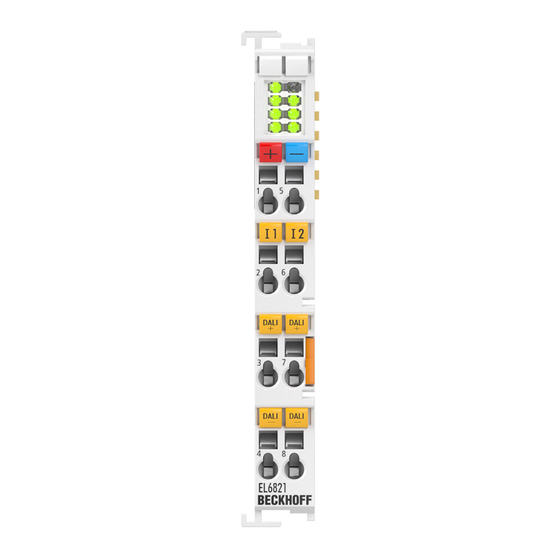
Seite 54: El6821 - Anschlussbelegung
Installation EL6821 - Anschlussbelegung | Error-LED Run-LED | Receive-LED Send-LED | DALI Power-LED +24 V Power-LED | Input 2-LED Input 1-LED +24 V Input 2 Input 1 DALI device Abb. 25: EL6821 Klemmstelle Anschluss für +24 V Anschluss Stromversorgung +24 V Input 1 Digitaler Eingang 1 DA +... - Seite 55 Auslieferungszustand folgendes Verhalten hinterlegt. Signal Broadcast Aktion Kommentar DALI Befehl Steigende Flanke an DI1 Schaltet alle Vorschaltgeräte AUS (ohne fading). Werkseinstellung Steigende Flanke an DI2 Schaltet alle Vorschaltgeräte auf maximale Helligkeit. Werkseinstellung Ist ein Vorschaltgerät ausgeschaltet, so wird es eingeschaltet. EL6821 Version: 1.0.0...
-
Seite 56: Anschlussbeispiele
1 x EL9562 + 1 x EL6821 1 x EL9562 + 2 x EL6821 Abb. 26: Anschlussbeispiele mit Netzteilklemme EL9562 und 1 x EL6821 (links) / 2 x EL6821 (rechts) 2. Über die Stromversorgungen können bis zu 12 x EL6821 bzw. bis zu 19 x EL6821 versorgt werden: ð... -
Seite 57: El6821 - Leds
Der digitale Eingang „Input 2“ ist ausgeschaltet. Der digitale Eingang „Input 2“ ist eingeschaltet oder‘ war aktiv und ist noch nicht quittiert worden. Der Status der LEDs kann auch über das CoE-Objekt 0xF915 ausgelesen werden (siehe Kapitel EL6821 – Geräte-Diagnosefunktionen [} 115]). EL6821... -
Seite 58: Konfiguration Mit Twincat
In den folgenden Kapiteln wird dem Anwender die Inbetriebnahme der TwinCAT Entwicklungsumgebung auf einem PC System der Steuerung sowie die wichtigsten Funktionen einzelner Steuerungselemente erläutert. Bitte sehen Sie weitere Informationen zu TwinCAT 2 und TwinCAT 3 unter http://infosys.beckhoff.de/. 5.1.1 Installation der TwinCAT Realtime-Treiber Um einen Standard Ethernet Port einer IPC-Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, ist... - Seite 59 Abb. 29: Aufruf im System Manager (TwinCAT 2) Unter TwinCAT 3 ist dies über das Menü unter „TwinCAT“ erreichbar: Abb. 30: Aufruf in VS Shell (TwinCAT 3) B: Über TcRteInstall.exe im TwinCAT-Verzeichnis Abb. 31: TcRteInstall.exe im TwinCAT-Verzeichnis In beiden Fällen erscheint der folgende Dialog: EL6821 Version: 1.0.0...
- Seite 60 TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“ geöffnet werden: Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnen Netzwerkschnittstelle (Windows Start → Systemsteuerung → Netzwerk) Version: 1.0.0 EL6821...
- Seite 61 Konfiguration mit TwinCAT Abb. 34: Windows-Eigenschaften der Netzwerkschnittstelle Eine korrekte Einstellung des Treibers könnte wie folgt aussehen: Abb. 35: Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports Andere mögliche Einstellungen sind zu vermeiden: EL6821 Version: 1.0.0...
- Seite 62 Konfiguration mit TwinCAT Abb. 36: Fehlerhafte Treiber-Einstellungen des Ethernet Ports Version: 1.0.0 EL6821...
- Seite 63 Protocol TCP/IP“ eine feste IP-Adresse für diesen Port zu vergeben und DHCP zu deaktivieren. Dadurch entfällt die Wartezeit, bis sich der DHCP-Client des Ethernet Ports eine Default-IP-Adresse zuteilt, weil er keine Zuteilung eines DHCP-Servers erhält. Als Adressraum empfiehlt sich z. B. 192.168.x.x. Abb. 37: TCP/IP-Einstellung des Ethernet Ports EL6821 Version: 1.0.0...
-
Seite 64: Hinweise Zur Esi-Gerätebeschreibung
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0025) beschreibt die Funktion des Gerätes. Die Revision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z. B. in der Dokumentation nicht anders angegeben. - Seite 65 Features mit. Wenn diese nicht genutzt werden sollen, kann ohne Bedenken mit der bisherigen Revision 1018 in der Konfiguration weitergearbeitet werden. Dies drückt auch die Beckhoff Kompatibilitätsregel aus. Siehe dazu insbesondere das Kapitel „Allgemeine Hinweise zur Verwendung von Beckhoff EtherCAT IO- Komponenten" und zur manuellen Konfigurationserstellung das Kapitel „Offline Konfigurationserstellung [} 69]“.
-
Seite 66: Onlinedescription Unter Twincat
(Spracheinstellungen des Betriebssystems beachten!) Diese Datei ist im gleichen Zuge wie die andere Datei zu löschen. Fehlerhafte ESI-Datei Liegt eine fehlerhafte ESI-Datei vor die vom System Manager nicht eingelesen werden kann, meldet dies der System Manager durch ein Hinweisfenster. Version: 1.0.0 EL6821... - Seite 67 Ursachen dafür können sein • Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei → prüfen Sie die Ihnen vorliegenden Schemata • Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden → Es ist der Hersteller der Datei zu kontaktieren EL6821 Version: 1.0.0...
-
Seite 68: Twincat Esi Updater
Konfiguration mit TwinCAT 5.1.3 TwinCAT ESI Updater Ab TwinCAT 2.11 kann der System Manager bei Online-Zugang selbst nach aktuellen Beckhoff ESI-Dateien suchen: Abb. 44: Anwendung des ESI Updater (>=TwinCAT 2.11) Der Aufruf erfolgt unter: „Options“ → „Update EtherCAT Device Descriptions“. Auswahl bei TwinCAT 3: Abb. 45: Anwendung des ESI Updater (TwinCAT 3) -
Seite 69: Offline Konfigurationserstellung
Für eine EtherCAT I/O Anwendung mit EtherCAT-Slaves ist der „EtherCAT“ Typ auszuwählen. „EtherCAT Automation Protocol via EL6601“ ist für den bisherigen Publisher/Subscriber-Dienst in Kombination mit einer EL6601/EL6614 Klemme auszuwählen. Abb. 47: Auswahl EtherCAT Anschluss (TwinCAT 2.11, TwinCAT 3) Diesem virtuellen Gerät ist dann ein realer Ethernet Port auf dem Laufzeitsystem zuzuordnen. EL6821 Version: 1.0.0... -
Seite 70: Auswahl Des Ethernet-Ports
Es können nur Ethernet-Ports für ein EtherCAT-Gerät ausgewählt werden, für die der TwinCAT- Realtime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen werden. Siehe dazu die entsprechende Installationsseite [} 58]. Definieren von EtherCAT-Slaves Durch Rechtsklick auf ein Gerät im Konfigurationsbaum können weitere Geräte angefügt werden. Version: 1.0.0 EL6821... - Seite 71 Das Suchfeld erleichtert das Auffinden eines bestimmten Gerätes (ab TwinCAT 2.11 bzw. TwinCAT 3). Abb. 51: Auswahldialog neues EtherCAT-Gerät Standardmäßig wird nur der Name/Typ des Gerätes als Auswahlkriterium verwendet. Für eine gezielte Auswahl einer bestimmen Revision des Gerätes kann die Revision als „Extended Information“ eingeblendet werden. EL6821 Version: 1.0.0...
-
Seite 72: Geräte-Auswahl Nach Revision, Kompatibilität
Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden, z. B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neues EtherCAT-Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzte Produktionsstand im Auswahldialog angezeigt. Sollen alle im System als ESI-Beschreibungen vorliegenden Revisionen eines Gerätes angezeigt werden, ist die Checkbox „Show Hidden Devices“... - Seite 73 Abb. 54: Name/Revision Klemme Wenn im TwinCAT-System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 74: Online Konfigurationserstellung
Abb. 57: Scan Devices (links: TwinCAT 2; rechts: TwinCAT 3) Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zu finden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatisch gefunden werden. Abb. 58: Hinweis automatischer GeräteScan (links: TwinCAT 2; rechts: TwinCAT 3) Version: 1.0.0 EL6821... -
Seite 75: Funktionsweise Online Scan
Konfigurationserstellung verwendet werden sondern ggf. zum Vergleich [} 79] mit der festgelegten Erst- Konfiguration. Hintergrund: da Beckhoff aus Gründen der Produktpflege gelegentlich den Revisionsstand der ausgelieferten Produkte erhöht, kann durch einen solchen Scan eine Konfiguration erzeugt werden, die (bei identischem Maschinenaufbau) zwar von der Geräteliste her identisch ist, die jeweilige Geräterevision unterscheiden sich aber ggf. - Seite 76 Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen mit Klemmen EL2521-0025-1018 angelegt. Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019.
- Seite 77 Abb. 67: Anzeige des Wechsels zwischen „Free Run“ und „Config Mode“ unten rechts in der Statusleiste Abb. 68: TwinCAT kann auch über einen Button in diesen Zustand versetzt werden (links: TC2; rechts TC3) Das EtherCAT-System sollte sich danach in einem funktionsfähigen zyklischen Betrieb nach Abb. Beispielhafte Online-Anzeige befinden. EL6821 Version: 1.0.0...
- Seite 78 ◦ fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf ◦ Slave hat ungültige Gerätebeschreibung Es sind die Verbindungen und Teilnehmer gezielt zu überprüfen, z. B. durch den Emergency Scan. Der Scan ist dann erneut vorzunehmen. Abb. 70: Fehlerhafte Erkennung Version: 1.0.0 EL6821...
-
Seite 79: Veränderung Der Konfiguration Nach Vergleich
Bei diesem Scan werden z. Z. (TwinCAT 2.11 bzw. 3.1) nur die Geräteeigenschaften Vendor (Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder „Copy“ sollte nur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s. o.) nur mit Bedacht vorgenommen werden. Das Gerät wird dann in der Konfiguration gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte... - Seite 80 Abb. 73: Name/Revision Klemme Wenn im TwinCAT-System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
- Seite 81 • PDO (Prozessdaten: Reihenfolge, SyncUnit SU, SyncManager SM, EntryCount, Entry.Datatype) Bei Geräten der AX5000-Familie wird diese Funktion intensiv verwendet. Change to Alternative Type Der TwinCAT System Manager bietet eine Funktion zum Austauschen eines Gerätes: Change to Alternative Type EL6821 Version: 1.0.0...
-
Seite 82: Ethercat-Teilnehmerkonfiguration
EL6695 bieten spezielle Funktionen über einen Karteireiter mit der eigenen Klemmenbezeichnung an, also „EL6695“ in diesem Fall. Ebenfalls wird ein spezieller Karteireiter „Settings“ von Klemmen mit umfangreichen Einstellmöglichkeiten angeboten (z. B. EL3751). Karteireiter „Allgemein“ Abb. 78: Karteireiter „Allgemein“ Version: 1.0.0 EL6821... - Seite 83 Zeigt die (Allgemeine Slave PDO-) Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsdaten des EtherCAT-Slaves werden als CANopen Prozess-Daten-Objekte (Process Data Objects, PDO) dargestellt. Falls der EtherCAT-Slave es unterstützt, ermöglicht dieser Dialog dem Anwender ein PDO über PDO-Zuordnung auszuwählen und den Inhalt des individuellen PDOs zu variieren. EL6821 Version: 1.0.0...
- Seite 84 Prozessdaten (Größe in Bit/Bytes, Quellort, Übertragungsart) er von oder zu diesem Slave übermitteln möchte. Eine falsche Konfiguration kann einen erfolgreichen Start des Slaves verhindern. Für Beckhoff EtherCAT-Slaves EL, ES, EM, EJ und EP gilt im Allgemeinen: • Die vom Gerät unterstützten Prozessdaten Input/Output sind in der ESI/XML-Beschreibung herstellerseitig definiert.
-
Seite 85: Manuelle Veränderung Der Prozessdaten
Karteireiters können Sie betrachten, welche Download-Requests während des Startups zur Mailbox gesendet werden. Es ist auch möglich neue Mailbox-Requests zur Listenanzeige hinzuzufügen. Die Download-Requests werden in derselben Reihenfolge zum Slave gesendet, wie sie in der Liste angezeigt werden. EL6821 Version: 1.0.0... - Seite 86 Karteireiter CoE - Online angezeigt. Dieser Dialog listet den Inhalt des Objektverzeichnisses des Slaves auf (SDO-Upload) und erlaubt dem Anwender den Inhalt eines Objekts dieses Verzeichnisses zu ändern. Details zu den Objekten der einzelnen EtherCAT-Geräte finden Sie in den gerätespezifischen Objektbeschreibungen. Version: 1.0.0 EL6821...
- Seite 87 Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben werden (Read/Write) Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das Objekt zu schreiben (Read only) Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt. Wert Wert des Objekts EL6821 Version: 1.0.0...
- Seite 88 Slave hochgeladen. In der untenstehenden Liste können Sie festlegen welche Objekt-Typen hochgeladen werden sollen. Offline - über EDS-Datei Wenn dieses Optionsfeld angewählt ist, wird die Liste der im Objektverzeichnis enthaltenen Objekte aus einer EDS-Datei gelesen, die der Anwender bereitstellt. Karteireiter „Online“ Abb. 85: Karteireiter „Online“ Version: 1.0.0 EL6821...
- Seite 89 Mit dieser Schaltfläche können Sie eine Datei vom EtherCAT-Gerät lesen. Karteireiter „DC“ (Distributed Clocks) Abb. 86: Karteireiter „DC“ (Distributed Clocks) Betriebsart Auswahlmöglichkeiten (optional): • FreeRun • SM-Synchron • DC-Synchron (Input based) • DC-Synchron Erweiterte Erweiterte Einstellungen für die Nachregelung der echtzeitbestimmenden Einstellungen… TwinCAT-Uhr EL6821 Version: 1.0.0...
-
Seite 90: Aktivierung Der Pdo-Zuordnung
Konfiguration mit TwinCAT Detaillierte Informationen zu Distributed Clocks sind unter http://infosys.beckhoff.de angegeben: Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Distributed Clocks 5.1.7.1 Detaillierte Beschreibung des Karteireiters „Prozessdaten“ Sync-Manager Listet die Konfiguration der Sync-Manager (SM) auf. Wenn das EtherCAT-Gerät eine Mailbox hat, wird der SM0 für den Mailbox-Output (MbxOut) und der SM1 für den Mailbox-Intput (MbxIn) benutzt. - Seite 91 Kommandos können in auf dem Karteireiter Startup [} 85] betrachtet werden. PDO-Konfiguration Falls dieses Kontrollkästchen angewählt ist, wird die Konfiguration des jeweiligen PDOs (wie sie in der PDO- Liste und der Anzeige PDO-Inhalt angezeigt wird) zum EtherCAT-Slave herunter geladen. EL6821 Version: 1.0.0...
-
Seite 92: Import/Export Von Ethercat-Teilnehmern Mittels Sci Und Xti
• innerhalb der TwinCAT‑Umgebung: Export/Import als xti‑Datei oder • außerhalb, d.h. TwinCAT‑Grenzen überschreitend: Export/Import als sci‑Datei. Zur Veranschaulichung im Folgenden ein Beispiel: eine EL3702‑Klemme in Standard‑Einstellung wird auf 2‑fach Oversampling umgestellt (blau) und das optionale PDO „StartTimeNextLatch“ wahlweise hinzugefügt (rot): Version: 1.0.0 EL6821... -
Seite 93: Das Vorgehen Innerhalb Twincat Mit Xti-Dateien
Die beiden genannten Methoden für den Export und Import der veränderten Klemme werden im Folgenden demonstriert. 5.1.8.2 Das Vorgehen innerhalb TwinCAT mit xti‑Dateien Jedes IO Gerät kann einzeln exportiert/abgespeichert werden: Die xti‑Datei kann abgelegt: und in einem anderen TwinCAT System über „Insert Existing item“ wieder importiert werden: EL6821 Version: 1.0.0... -
Seite 94: Das Vorgehen Innerhalb Und Außerhalb Twincat Mit Sci-Datei
• Falls TwinCAT offline ist (es liegt keine Verbindung zu einer laufenden realen Steuerung vor) kann eine Warnmeldung erscheinen, weil nach Ausführung der Funktion das System den Versuch unternimmt, den EtherCAT-Strang neu zu laden, ist in diesem Fall allerdings nicht ergebnisrelevant und kann mit Klick auf „OK“ bestätigt werden: Version: 1.0.0 EL6821... - Seite 95 Die konfigurierte Zykluszeit wird exportiert. Üblicherweise ist diese netzwerkabhängig und time(0x1C3x.2) kann nicht immer vorab bestimmt werden. Referenz auf die ursprüngliche ESI Datei. Export SCI Datei speichern. • Bei Mehrfachauswahl ist eine Listenansicht verfügbar (Export multiple SCI files): • Auswahl der zu exportierenden Slaves: EL6821 Version: 1.0.0...
- Seite 96 Es werden alle Slaves abgewählt. • Die sci‑Datei kann lokal abgespeichert werden: • Es erfolgt der Export: Import • Eine sci‑Beschreibung kann wie jede normale Beckhoff‑Gerätebeschreibung manuell in die TwinCAT‑Konfiguration eingefügt werden. • Die sci‑Datei muss im TwinCAT‑ESI‑Pfad liegen, i.d.R. unter: C:\TwinCAT\3.1\Config\Io\EtherCAT •...
- Seite 97 Konfiguration mit TwinCAT • SCI‑Geräte anzeigen und gewünschtes Gerät auswählen und einfügen: Weitere Hinweise • Einstellungen für die SCI‑Funktion können über den allgemeinen Options Dialog vorgenommen werden (Tools → Options → TwinCAT → Export SCI): Erläuterung der Einstellungen: EL6821 Version: 1.0.0...
- Seite 98 Standard Einstellung, ob die Module bestehen bleiben. Generic Reload Devices Einstellung, ob vor dem SCI Export das Kommando „Reload Devices“ ausgeführt wird. Dies wird dringend empfohlen, um eine konsistente Slave‑Konfiguration zu gewährleisten. SCI‑Fehlermeldungen werden bei Bedarf im TwinCAT Logger Output‑Fenster angezeigt: Version: 1.0.0 EL6821...
-
Seite 99: Allgemeine Inbetriebnahmehinweise Für Einen Ethercat-Slave
Diese Diagnose ist für alle Slaves gleich. als auch über • kanal-typische Funktionsdiagnose (geräteabhängig), siehe entsprechende Gerätedokumentation Die Farbgebung in Abb. Auswahl an Diagnoseinformationen eines EtherCAT-Slaves entspricht auch den Variablenfarben im System Manager, siehe Abb. Grundlegende EtherCAT-Slave Diagnose in der PLC. EL6821 Version: 1.0.0... - Seite 100 Variablen über ADS sinnvoll. In Abb. Grundlegende EtherCAT Slave Diagnose in der PLC ist eine Beispielimplementation einer grundlegenden EtherCAT-Slave Diagnose zu sehen. Dabei wird eine Beckhoff EL3102 (2 kanalige analoge Eingangsklemme) verwendet, da sie sowohl über slave-typische Kommunikationsdiagnose als auch über kanal-spezifische Funktionsdiagnose verfügt.
-
Seite 101: Diagnoseinformationen
CoE-Parameterverzeichnis Das CoE-Parameterverzeichnis (CanOpen-over-EtherCAT) dient der Verwaltung von Einstellwerten des jeweiligen Slaves. Bei der Inbetriebnahme eines komplexeren EtherCAT-Slaves sind unter Umständen hier Veränderungen vorzunehmen. Zugänglich ist es über den TwinCAT System Manager, s. Abb. EL3102, CoE- Verzeichnis: EL6821 Version: 1.0.0... - Seite 102 Inbetriebnahmehilfe im TwinCAT System Manager In einem fortschreitenden Prozess werden für EL/EP-EtherCAT-Geräte Inbetriebnahmeoberflächen eingeführt. Diese sind im TwinCAT System Manager ab TwinCAT 2.11R2 verfügbar. Sie werden über entsprechend erweiterte ESI-Konfigurationsdateien in den System Manager integriert. Abb. 90: Beispiel Inbetriebnahmehilfe für eine EL3204 Version: 1.0.0 EL6821...
- Seite 103 System Manager eingestellt werden. Sobald TwinCAT in RUN versetzt wird, wird dann der TwinCAT EtherCAT-Master die Zielzustände anfahren. Standardeinstellung Standardmäßig ist in den erweiterten Einstellungen des EtherCAT-Masters gesetzt: • EtherCAT-Master: OP • Slaves: OP Diese Einstellung gilt für alle Slaves zugleich. EL6821 Version: 1.0.0...
- Seite 104 Dann ist es in der PLC-Anwendung sinnvoll, die PLC-Funktionsblöcke aus der standardmäßig vorhandenen TcEtherCAT.lib zu nutzen und z. B. mit FB_EcSetMasterState die States kontrolliert anzufahren. Die Einstellungen im EtherCAT-Master sind dann sinnvollerweise für Master und Slave auf INIT zu setzen. Version: 1.0.0 EL6821...
- Seite 105 (z. B. EL9410) zu setzen. Im TwinCAT System Manager wird der vorberechnete theoretische maximale E-Bus-Strom als Spaltenwert angezeigt. Eine Unterschreitung wird durch negativen Summenbetrag und Ausrufezeichen markiert, vor einer solchen Stelle ist eine Einspeiseklemme zu setzen. Abb. 94: Unzulässige Überschreitung E-Bus Strom EL6821 Version: 1.0.0...
- Seite 106 Konfiguration mit TwinCAT Ab TwinCAT 2.11 wird bei der Aktivierung einer solchen Konfiguration eine Warnmeldung „E-Bus Power of Terminal...“ im Logger-Fenster ausgegeben: Abb. 95: Warnmeldung E-Bus-Überschreitung HINWEIS Fehlfunktion möglich! Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepotential erfolgen! Version: 1.0.0 EL6821...
-
Seite 107: El6821 - Inbetriebnahme
EL6821 - Inbetriebnahme EL6821 - Inbetriebnahme EL6821 - Integration in TwinCAT 6.1.1 EL6821 mit CX5120 Dieses Beispiel beschreibt, wie ein einfaches SPS-Programm für DALI in TwinCAT geschrieben werden kann und wie es mit der Hardware verknüpft wird. Es soll eine einzelne Lampe angesteuert und per Taster auf den maximalen Ausgangswert geschaltet oder ausgeschaltet werden. - Seite 108 EL6821 - Inbetriebnahme Legen Sie ein MAIN-Programm (CFC) an, in dem die Bausteine FB_DALI102RecallMaxLevel und FB_DALI102Off folgendermaßen deklariert werden. PROGRAM MAIN fb102RecallMaxLevel : FB_DALI102RecallMaxLevel(Communication.fbEL6821Communication); fb102Off : FB_DALI102Off(Communication.fbEL6821Communication); END_VAR In den runden Klammern hinter der Deklaration wird der Kommunikationsbaustein angegeben. Über diese Angabe wird die Referenz zu der gewünschten DALI-Klemme festgelegt.
- Seite 109 EL6821 - Inbetriebnahme Legen Sie eine weitere Task für die Hintergrundkommunikation an. Geben Sie dieser Task eine höhere Priorität (kleinere Zahl) und eine niedrigere Intervall-Zeit als der PlcTask. Fügen Sie dieser Task das Programm für die Kommunikation zu. Genauere Information zur Taskkonfiguration finden Sie in der Beschreibung des Bausteins FB_EL6821Communication.
- Seite 110 EL6821 - Inbetriebnahme In der Instanz (DALI_Sample_EL6821_CX5120 Instance) des SPS-Projekts, sehen Sie, dass die Ein- und Ausgangsvariablen des SPS-Programms den entsprechenden Tasks (PlcCommunication und PlcTask) zugeordnet sind. Verknüpfen Sie die globalen Variablen des SPS-Programms nun mit den Ein- und Ausgängen der Busklemmen.
-
Seite 111: Inbetriebnahme El6821
Typen der DALI-Geräte und zeigt diese in einer Baumstruktur an. Des Weiteren sind sämtliche Parameter der EL6821 über TwinCAT XAE einstellbar. Somit lassen sich z. B. die DALI-Befehle definieren, die bei Betätigung der digitalen Eingänge an der EL6821 versendet werden. - Seite 112 • Definition des DALI-Befehls für den E-Bus Watchdog (Ausfall E-Bus) • Ein-/Ausschalten des DALI-Netzteils • Ein-/Ausschalten der Sperrung des Prozessabbildes für die SPS, sobald durch das Betätigen eines digitalen Eingangs an der EL6821 ein DALI-Befehl gesendet wird. Version: 1.0.0 EL6821...
-
Seite 113: El6821 - Prozessdaten
EL6821 - Prozessdaten Die verfügbaren Prozessdatenobjekte (PDO) werden in der „PDO List“ im Reiter „Process Data“ angezeigt. Inhalte „PDO Content“ und Zuordnung „PDO Assignment“ der Prozessdatenobjekte können für die EL6821 nicht geändert werden. Die Eingangsprozessdaten sind dem Sync Manager 3 (SM 3), die Ausgangsprozessdaten dem Sync manager 2 (SM 2) zugeordnet. - Seite 114 EL6821 - Inbetriebnahme Sync Manager SM 2 „Outputs“ Abb. 97: EL6821 – Ausgangsprozessdaten SM 2 Sehen Sie dazu auch: 0x7000 – Ausgangsdaten [} 121] 0x1600 – „DALI Control“ [} 124] Version: 1.0.0 EL6821...
-
Seite 115: El6821 - Geräte-Diagnosefunktionen
Über das CoE-Verzeichnis können Diagnoseinformationen zur DALI‑Kommunikation (0xA000:0 „Diag“) sowie der LED-Status (Objekt 0xF915:0 „LED Status“) ausgelesen werden. Diagnose über das Objekt 0xA000:0 Die Klemme hat eine integrierte Diagnose, die im Objekt 0xA000:0 ausgelesen werden kann. Abb. 98: EL6821 – CoE-Objekt 0xA000 „Diag” Index Name Beschreibung 0xA000:01 Frames on DALI Bus... -
Seite 116: El6821 - Objektbeschreibung Und Parametrierung
EL6821 - Inbetriebnahme LED‑Status in Objekt 0xF915:0 am Beispiel der Klemme EL6821 Run-LED | Error-LED Send-LED | Receive-LED +24 V Power-LED | DALI Power-LED Input 1-LED | Input 2-LED Index Wert LED Status Bedeutung 1 | Run-LED (grün) 0xF915:01 0x00 00 FF 00... -
Seite 117: Konfigurationsdaten (0X8Xxx)
EL6821 - Inbetriebnahme 6.5.2 Konfigurationsdaten (0x8xxx) Index 8000 Emergency Message Index (hex) Name Bedeutung Datentyp Flags Default 8000:0 Emergency Message Maximaler Subindex UINT8 >14< 8000:01 Frame Type Frame-Typ: BIT2 0x00 (0 0: „No Frame” (Werkseinstellung) 1: “16 Bit” 2: “24 Bit” 3: “32 Bit”... - Seite 118 EL6821 - Inbetriebnahme Index 8010 Input Settings Ch. 1 Index (hex) Name Bedeutung Datentyp Flags Default 8010:0 Input Settings Ch. 1 Maximaler Subindex UINT8 >1< 8010:01 Frame Type falling Frame-Typ bei fallender Flanke an „Input 1“ BIT3 0x00 (0 Edge 0: „No Frame” (Werkseinstellung) 1: “16 Bit”...
- Seite 119 EL6821 - Inbetriebnahme Index 8020 Input Settings Ch. 2 Index (hex) Name Bedeutung Datentyp Flags Default 8020:0 Input Settings Ch. 2 Maximaler Subindex UINT8 >18< 8020:01 Frame Type falling Frame-Typ bei fallender Flanke an „Input 2“ BIT3 0x00 (0 Edge 0: „No Frame” (Werkseinstellung) 1: “16 Bit”...
-
Seite 120: Eingangsdaten (0X6Xxx)
0x00 (0 Code *) Die Bausteine für die DALI‑Befehle greifen nicht direkt auf das Prozessabbild der EL6821 zu, sondern legen die einzelnen DALI‑Befehle in einem Befehlspuffer ab. Der Baustein „FB_EL6821Communication“ liest sequenziell die DALI‑Befehle aus diesem Befehlspuffer aus und gibt diese zur EL6821 weiter. -
Seite 121: Ausgangsdaten (0X7Xxx)
EL6821 - Inbetriebnahme Index 6030 RxBuffer Entry Index (hex) Name Bedeutung Datentyp Flags Default 6030:0 RxBuffer Entry Maximaler Subindex UINT8 >17< 6030:01 Info_Frame Type Frame-Typ BIT3 0x00 (0 0: „No Frame“ 1: „8 Bit Answer“ 2: „16 Bit“ 3: „24 Bit“ 4: „32 Bit“ 5: „Non DALI“... -
Seite 122: Diagnostikdaten (0Xa000, 0Xf000, 0Xf915)
EL6821 - Inbetriebnahme 6.5.5 Diagnostikdaten (0xA000, 0xF000, 0xF915) Index A000 Diag Index (hex) Name Bedeutung Datentyp Flags Default A000:0 Diag Maximaler Subindex UINT8 >24< A000:01 Frames on DALI Bus Frames auf dem DALI-Bus UINT8 0x00 (0 A000:09 Received DALI 16 Bit Empfangene DALI 16 Bit Frames... - Seite 123 EL6821 - Inbetriebnahme Index 1008 Device name Index (hex) Name Bedeutung Datentyp Flags Default 1008:0 Device name Geräte-Name des EtherCAT-Slaves STRING EL6821 Index 1009 Hardware version Index (hex) Name Bedeutung Datentyp Flags Default 1009:0 Hardware version Hardware-Version des EtherCAT-Slaves STRING...
- Seite 124 EL6821 - Inbetriebnahme Index 1600 DALI RxPDO-Map Control Index (hex) Name Bedeutung Datentyp Flags Default 1600:0 DALI RxPDO-Map PDO Mapping DALI RxPDO-Map Control UINT8 >13< Control 1600:01 SubIndex 001 1. PDO Mapping entry (object 0x7000 (Control), UINT32 0x7000:01, 1 entry 0x01 (Ctrl_Toggle Send)) 1600:02 SubIndex 002 2.
- Seite 125 EL6821 - Inbetriebnahme Index 1A10 DI TxPDO-Map Ch. 1 Index (hex) Name Bedeutung Datentyp Flags Default 1A10:0 DI TxPDO-Map Ch. 1 PDO Mapping DI TxPDO-Map Ch. 1 UINT8 >2< 1A10:01 SubIndex 001 1. PDO Mapping entry (object 0x6010 (Input Ch. 1), UINT32 0x6010:01, 1 entry 0x01 (Input))
- Seite 126 EL6821 - Inbetriebnahme Index 1C32 SM output parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C32:0 SM output parameter Synchronisierungsparameter der Outputs UINT8 0x20 (32 1C32:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0000 (0 • 0: FreeRun/SM‑Synchron 1C32:02 Cycle time Zykluszeit (in ns):...
- Seite 127 EL6821 - Inbetriebnahme Index 1C33 SM input parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C33:0 SM input parameter Synchronisierungsparameter der Inputs UINT8 0x20 (32 1C33:01 Sync mode • 0: Free Run UINT16 0x0000 (0 • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
-
Seite 128: Programmierung
Programmierung Programmierung Die Programmierung der EL6821 erfolgt ausschließlich über Funktionsbausteine der SPS‑Bibliotheken. Die Programmierung erfolgt ausschließlich über TwinCAT-3-Funktionsbausteine. Siehe Software-Dokumentation im Beckhoff-Information-System. TwinCAT 3: TwinCAT 3 | PLC Lib: Tc3_DALI Version: 1.0.0 EL6821... -
Seite 129: Anhang
Kombination gegeben. Die unten angegebene Übersicht zeigt auf welchem Hardware-Stand eine Firmware betrieben werden kann. Anmerkung • Es wird empfohlen, die für die jeweilige Hardware letztmögliche Firmware einzusetzen • Ein Anspruch auf ein kostenfreies Firmware-Update bei ausgelieferten Produkten durch Beckhoff gegenüber dem Kunden besteht nicht. HINWEIS Beschädigung des Gerätes möglich! Beachten Sie die Hinweise zum Firmware Update auf der gesonderten Seite [} 130]. -
Seite 130: Firmware Update El/Es/Elm/Em/Ep/Epp/Erpxxxx
Anhang Firmware Update EL/ES/ELM/EM/EP/EPP/ERPxxxx Dieses Kapitel beschreibt das Geräte-Update für Beckhoff EtherCAT-Slaves der Serien EL/ES, ELM, EM, EK, EP, EPP und ERP. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden. HINWEIS Nur TwinCAT 3 Software verwenden! Ein Firmware-Update von Beckhoff IO Geräten ist ausschließlich mit einer TwinCAT 3-Installation... -
Seite 131: Gerätebeschreibung Esi-File/Xml
Die Gerätebeschreibung ESI wird auf dem Slave lokal gespeichert und beim Start geladen. Jede Gerätebeschreibung hat eine eindeutige Kennung aus Slave-Name (9-stellig) und Revision-Nummer (4- stellig). Jeder im System Manager konfigurierte Slave zeigt seine Kennung im EtherCAT-Reiter: Abb. 99: Gerätekennung aus Name EL3204-0000 und Revision -0016 EL6821 Version: 1.0.0... -
Seite 132: Update Von Xml/Esi-Beschreibung
Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder sogar zur endgültigen Außerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit dem Beckhoff Support ausgeführt werden. Anzeige der Slave-Kennung ESI Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibung festzustellen, ist im TwinCAT-Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:... - Seite 133 • Rechtsklick auf den Slave in der Online-Anzeige führt zum Dialog EEPROM Update, Abb. EEPROM Update Abb. 103: EEPROM Update Im folgenden Dialog wird die neue ESI-Beschreibung ausgewählt, s. Abb. Auswahl des neuen ESI. Die CheckBox Show Hidden Devices zeigt auch ältere, normalerweise ausgeblendete Ausgaben eines Slave. EL6821 Version: 1.0.0...
-
Seite 134: Änderung Erst Nach Neustart Wirksam
• offline: in der EtherCAT Slave Information ESI/XML kann der Default-Inhalt des CoE enthalten sein. Dieses CoE-Verzeichnis kann nur angezeigt werden, wenn es in der ESI (z. B. „Beckhoff EL5xxx.xml“) enthalten ist. Die Umschaltung zwischen beiden Ansichten kann über den Button Advanced vorgenommen werden. -
Seite 135: Update Controller-Firmware *.Efw
Das Online-CoE-Verzeichnis wird vom Controller verwaltet und in einem eigenen EEPROM gespeichert. Es wird durch ein FW-Update im Allgemeinen nicht verändert. Um die Controller-Firmware eines Slave zu aktualisieren, wechseln Sie zum Karteireiter Online, s. Abb. Firmware Update. EL6821 Version: 1.0.0... - Seite 136 Anhang Abb. 106: Firmware Update Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen. Gültig für TwinCAT 2 und 3 als EtherCAT-Master. • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1ms schalten (default sind im ConfigMode 4 ms).
-
Seite 137: Fpga-Firmware *.Rbf
Der TwinCAT System Manager zeigt die Version der FPGA-Firmware an. Klicken Sie hierzu auf die Ethernet-Karte Ihres EtherCAT-Stranges (im Beispiel Gerät 2) und wählen Sie den Karteireiter Online. Die Spalte Reg:0002 zeigt die Firmware-Version der einzelnen EtherCAT-Geräte in hexadezimaler und dezimaler Darstellung an. EL6821 Version: 1.0.0... - Seite 138 Abb. 108: Kontextmenu Eigenschaften (Properties) In dem folgenden Dialog Advanced Settings können Sie festlegen, welche Spalten angezeigt werden sollen. Markieren Sie dort unter Diagnose/Online Anzeige das Kontrollkästchen vor '0002 ETxxxx Build' um die Anzeige der FPGA-Firmware-Version zu aktivieren. Version: 1.0.0 EL6821...
- Seite 139 Ältere Firmware-Stände können nur vom Hersteller aktualisiert werden! Update eines EtherCAT-Geräts Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen: • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1 ms schalten (default sind im ConfigMode 4 ms).
- Seite 140 • Wählen Sie im TwinCAT System Manager die Klemme an, deren FPGA-Firmware Sie aktualisieren möchten (im Beispiel: Klemme 5: EL5001) und klicken Sie auf dem Karteireiter EtherCAT auf die Schaltfläche Weitere Einstellungen: • Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf die Schaltfläche Schreibe FPGA: Version: 1.0.0 EL6821...
-
Seite 141: Gleichzeitiges Update Mehrerer Ethercat-Geräte
Die Firmware von mehreren Geräten kann gleichzeitig aktualisiert werden, ebenso wie die ESI- Beschreibung. Voraussetzung hierfür ist, dass für diese Geräte die gleiche Firmware-Datei/ESI gilt. Abb. 110: Mehrfache Selektion und FW-Update Wählen Sie dazu die betreffenden Slaves aus und führen Sie das Firmware-Update im BOOTSTRAP Modus wie o. a. aus. EL6821 Version: 1.0.0... -
Seite 142: Wiederherstellen Des Auslieferungszustandes
• Dieser Reset-Vorgang kann auch als erster Eintrag in die StartUp-Liste des Slaves mit aufgenommen werden, z. B. im Statusübergang PREOP->SAFEOP oder, wie in Abb. CoE-Reset als StartUp-Eintrag, bei SAFEOP->OP Alle Backup-Objekte werden so in den Auslieferungszustand zurückgesetzt. Version: 1.0.0 EL6821... - Seite 143 Anhang Alternativer Restore-Wert Bei einigen Klemmen älterer Bauart (FW Erstellung ca. vor 2007) lassen sich die Backup-Objekte mit einem alternativen Restore-Wert umstellen: Dezimalwert: 1819238756, Hexadezimalwert: 0x6C6F6164. Eine falsche Eingabe des Restore-Wertes zeigt keine Wirkung! EL6821 Version: 1.0.0...
-
Seite 144: Support Und Service
Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Niederlassungen und Vertretungen Wenden Sie sich bitte an Ihre Beckhoff Niederlassung oder Ihre Vertretung für den lokalen Support und Service zu Beckhoff Produkten! Die Adressen der weltweiten Beckhoff Niederlassungen und Vertretungen entnehmen Sie bitte unseren Internetseiten: www.beckhoff.com... - Seite 145 , XFC , XPlanar and XTS are registered and licensed trademarks of Beckhoff Automation GmbH. Third-party trademark statements DeviceNet and EtherNet/IP are trademarks of ODVA, Inc. DSP System Toolbox, Embedded Coder, MATLAB, MATLAB Coder, MATLAB Compiler, MathWorks, Predictive Maintenance Toolbox, Simscape, Simscape™...
- Seite 146 Mehr Informationen: www.beckhoff.com/EL6821 Beckhoff Automation GmbH & Co. KG Hülshorstweg 20 33415 Verl Deutschland Telefon: +49 5246 9630 info@beckhoff.com www.beckhoff.com...