AZ-Delivery PCA9685 Bedienungsanleitung

Verwandte Anleitungen für AZ-Delivery PCA9685
















Inhaltszusammenfassung für AZ-Delivery PCA9685
- Seite 1 Willkommen! Vielen Dank, dass sie sich für unseren "PCA9685" 16 Kanal Servotreiber von AZ-Delivery entschieden haben. In den nachfolgenden Seiten werden wir Ihnen erklären wie Sie das Gerät einrichten und nutzen können. Viel Spaß!
- Seite 2 Anwendungsbereiche Bildung und Lehre: Einsatz in Schulen, Hochschulen und Ausbildungseinrichtungen zur Vermittlung von Grundlagen der Elektronik, Programmierung und eingebetteten Systemen. Forschung und Entwicklung: Verwendung in Forschungs- und Ent- wicklungsprojekten zur Erstellung von Prototypen und Experimenten in den Bereichen Elektronik und Informatik. Prototypen- entwicklung: Einsatz in der Entwicklung und Erprobung neuer elektronischer Schaltungen und Geräte.
- Seite 3 Anforderungen der RoHS-Richtlinie (2011/65/EU) entspricht und keine gefährlichen Stoffe in über den Grenzwerten zulässigen Mengen enthält, können dennoch Rückstände vorhanden sein. Beachten Sie die folgenden Sicherheitshinweise, um chemische Gefährdungen zu vermeiden: Achtung: Beim Löten können Dämpfe entstehen, die gesundheitsschädlich sein können. Hin- weis: Verwenden Sie einen Lötdampfabsauger oder arbeiten Sie in einem gut belüfteten Bereich.
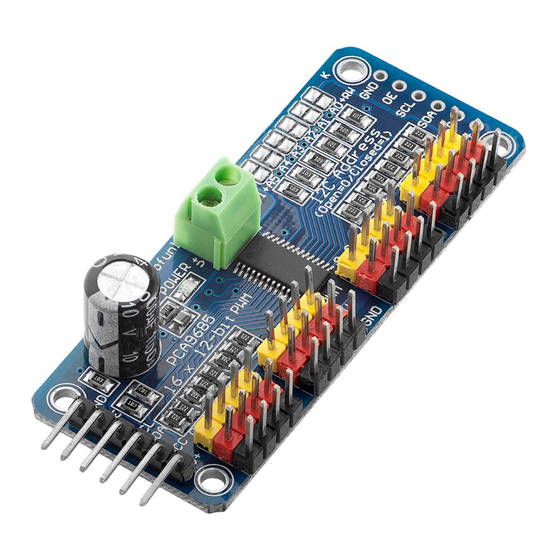
- Seite 4 Das Modul "PCA9685" ist ein I2C-Bus gesteuertes 16-Kanal PWM- Controller-Modul für Atmegaa328p und Raspberry Pi Anwendungen mit Servomotoren. Jeder PWM-Servoausgang hat einen separaten internen PWM-Regler mit 12 Bit Auflösung (4096 Schritte). Der PWM-Ausgangstreiber kann entweder als "Drain" mit einer 25mA- Stromsenke bei 5V oder als "totem pole"...
- Seite 5 I2C Bus - Taktleitung > SDA Eingang I2C Bus - Datenleitung > VCC max. Versorgungsspannung 5V (für PCA9685) > V+ max. Versogungsspannung. 6V (für Servos) Pin 6 sollte unbesetzt bleiben. Verwenden Sie stattdessen die grüne Schraubklemme auf der Oberseite des Boards für die Stromversorgung der...
- Seite 6 Ausgangsfreigabe Der active LOW Ausgangsfreigaben-Eingangspin (OE) ermöglicht die asynchrone Steuerung der PWM-Ausgänge und kann dazu verwendet werden, alle Ausgänge in einen definierten, programmierbaren I2C- Buslogikzustand zu versetzen. Der "OE" kann auch zur externen "Pulsweitenmodulation" der Ausgänge verwendet werden. Dies ist dann sinnvoll, wenn mehrere Geräte per Software-Steuerung gemeinsam gedimmt oder aufgehellt werden sollen.
- Seite 7 PWM - Basisfrequenz Der PCA9685 hat eine einstellbare PWM-Basisfrequenz von 24Hz bis 1526Hz, wobei die Genauigkeit der PWM-Basisfrequenz nicht sehr hoch ist, da der interne Oszillator als Taktgeber verwendet wird. Die Bestimmung der PWM-Basisfrequenz erfolgt über einen internen, programmierbaren Vorteilerwert, der in das Register 0xFEh geschrieben wird. Alle Ausgänge arbeiten immer mit der gleichen PWM-Frequenz, wobei das Tastverhältnis...
- Seite 8 Spannungsversorgung des Moduls/Ausgangsstrombegrenzung Auf der linken Steckerleiste des Moduls befinden sich zwei positive Versorgungspins und ein Massestift. Die positiven Versorgungspins werden mit Vcc und V+ beschrieben. Vcc ist die Versorgung für den PWM-Chip und nicht für die Servos! V+ sollte nicht angeschlossen werden Die Stromversorgung der Servos sollte aber über die grüne Stromversorgungsklemme auf der Oberseite des Boards erfolgen, mit einem Netzteil der entsprechenden Stärke.
-
Seite 9: Ansteuerung Mehrerer Module
Ansteuerung mehrerer Module Sollten 16 Ausgänge für ein Projekt nicht ausreichen, können weitere Module mit dem I2C-Bus zusammen geschaltet werden. Die dafür notwendige Verdrahtung ist unten dargestellt: Es ist zu beachten, dass spätestens hier die Versorgung der einzelnen Servos nicht mehr vom Atmegaa328p übernommen werden kann. Sie müssen die Versorgungsspannung extern über die grünen Klemmen zuführen. - Seite 10 Die addressierten Lotbrücken A0 bis A5 auf dem Modul sollten dann für jedes Modul dem Binärcode entsprechend (aufwärtszählend) Binärcode unterschiedlich beschaltet werden: PWM Module: Lötbrücke für: I2C-Adresse des Moduls: Keine Verbindung 0x40 0x41 0x42 A0 und A1 0x43 0x44 A2 und A1 0x45 Die Steuerregisteradressen beginnen mit jedem Modul neu.
-
Seite 11: Die Library Und Code
Die library und Code Wir nutzen library https://github.com/NachtRaveVL/PCA9685-Arduino Um es in die Arduino IDE einzubinden, laden Sie es vom obigen Link herunter. Die Datei, die Sie herunterladen, wird eine .zip sein, also gehen Sie in Ihrer Arduino IDE zu: Sketch > Include Library > Add .ZIP Library Finden und fügen Sie die .zip-Datei hinzu, die Sie gerade heruntergeladen... - Seite 12 PCA9685_ServoEvaluator pwmServo2(102, 310, 505); // (0deg, 90deg, 180deg) Mit: Wire.setClock(400000); definieren wir die I2C Baudrate bei 400kHz. Mit: driver.init(B000000); stellen wir unsere I2C-Adresse unseres PCA9685 auf 0x40. Mit: driver.setPWMFrequency(50); stellen wir die PWM-Frequenz auf 50Hz. Um die Servowelle zu bewegen, benutzen wir : driver.setChannelPWM(0, pwmServo.pwmForAngle(-90));...
- Seite 13 { Wire.begin(); // Wire must be started first Wire.setClock(400000);// Supported baud rates are 100kHz,400kHz, and 1000kHz driver.resetDevices();// Software resets all PCA9685 devices on Wire line driver.init(B000000); // Address pins A5-A0 set to B000000 driver.setPWMFrequency(50); // Set frequency to 50Hz...
- Seite 14 Möglichkeiten, sich Sachen Mikroelektronik weiterzubilden. Falls Sie nach noch weiteren hochwertigen Produkten für Arduino und Raspberry Pi suchen, sind Sie bei AZ-Delivery Vertriebs GmbH goldrichtig. bieten Ihnen zahlreiche Anwendungsbeispiele, ausführliche Installationsanleitungen, E-Books, Bibliotheken und natürlich die Unterstützung unserer technischen Experten.