pichler Naze32 Handbuch
Flight controller

Verwandte Anleitungen für pichler Naze32



Inhaltszusammenfassung für pichler Naze32
- Seite 1 Flight Controller Naze32 Mini Fun Fly Deutsche Übersetzung: v1.0/2013, rOsewhite Irrtümer und Fehler vorbehalten...
-
Seite 2: Inhaltsverzeichnis
Mini FunFly Flight Controller “Naze32” Inhaltsverzeichnis Mini Flight Controller................. Seite 3 Ansicht von oben..................Seite 4 Ansicht von unten..................Seite 5 Anschluss der Motoren................Seite 6 Anschluss des Empfängers................ Seite 7 Konfiguration des Motor-Mischers............... Seite 8 Verwendung eines Kamera-Gimbals............Seite 9... -
Seite 3: Mini Flight Controller
Mini FunFly Flight Controller “Naze32” Mini Flight Controller Größe: 36 x 36 mm (Lochraster: 30,5 x 30,5 cm) 6 Gramm (ohne Stiftleisten, 8 Gramm mit Stiftleisten) Moderner 32-bit ARM Prozessor mit 3,3 V/72 Hz MEMS Gyro, Beschleunigungssensor, Kompass und Barometer... -
Seite 4: Ansicht Von Oben
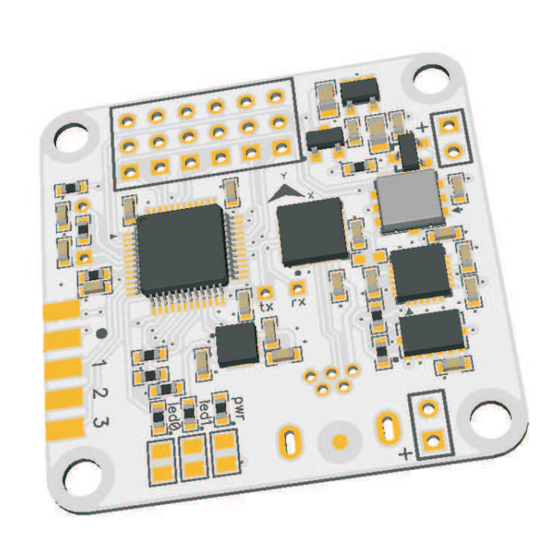
Mini FunFly Flight Controller “Naze32” Ansicht von oben 1) ESC/Servo Anschlüsse 2) Empfängeranschluss, Servo-Anschluss (bei PPM), GPS-Anschluss 3) Status LEDs (rot, grün) 4) Power LED (blau) 5) USB-Anschluss 6) Optionaler Anschluss für Spannungsüberwachung 7) M3 Montagebohrungen (30,5 x 30,5 mm Lochraster) 8) Serieller Anschluss für Telemetrie, Bluetooth oder Xbee... -
Seite 5: Ansicht Von Unten
Mini FunFly Flight Controller “Naze32” Ansicht von unten 10) I2C Anschluss 11) Bootloader Pads 12) Cortex Debug Anschluss Seite 5... -
Seite 6: Anschluss Der Motoren
Mini FunFly Flight Controller “Naze32” Anschluss der Motoren HINWEIS: Nur bei PPM Summensignal Signal oder Spektrum Satellit Servo M5 M6 M7 M8 S1 S2 M1 M2 M3 M4 Mode Standard M1 M2 M3 M4 M5 M6 M7 M8 M9 M10 Mode Abhängig von der Motor-Konfiguration und dem Empfänger-Typ können bis zu 8... -
Seite 7: Anschluss Des Empfängers
Mini FunFly Flight Controller “Naze32” Anschluss des Empfängers Standard-Empfänger Mit der beiliegenden Kabelpeitsche kann ein Standard-Empfänger an angeschlossen werden. Von vorne auf die Pins betrachtet liegt links oben in der Ecke GND, gefolgt von +5V (Empfängerversorgung). Anschließend folgen in der oberen Reihe die Kanaleingänge 1-3 und in der unteren Reihe die Kanaleingänge 4-8. -
Seite 8: Konfiguration Des Motor-Mischers
Mini FunFly Flight Controller “Naze32” Konfiguration des Motor-Mischers Die unteren Abbildungen zeigen die Motor-Nummerierungen und Laufrichtungen für die unterstützten Multicopter-Typen. Der Pfeil auf der Flugsteuerung zeigt ebenso wie die roten Pfeile in den Abbildungen grundsätzlich in Flugrichtung. Beim Y4 und Y6 bezeichnen die violetten Symbole die oberen Motoren und die blauen die unteren. -
Seite 9: Verwendung Eines Kamera-Gimbals
Servo M1 M2 M3 M4 Mode Das Naze32 kann als eigenständige Steuerung zur Stabilisierung eines Kamera- Gimbals verwendet werden. Hierzu muss als Motor-Mischer “Standard Gimbal Stabilization” ausgewählt werden. Es werden analoge Servos (50Hz) sowie digitale Servos (200Hz oder mehr) unterstützt. Für beide Achsen (Tilt und Roll) können Übersetzungsverhältnis, Neutralstellung und Endanschläge in der Software... -
Seite 10: Konfigurations-Software
Sie muss nur in einen Ordner entpackt werden und erfordert keine Installation. Nachdem der Treiber installiert und das Naze32 mit einem USB-Kabel mit dem PC verbunden ist, sollte man einen Blick in den Gerätemanager (Computer -> Verwalten -> Gerätemanager) werfen. Unter “Anschlüsse (COM & LPT)” sollte der CP210x USB to UART einem COM-Port zugewiesen sein. - Seite 11 Mini FunFly Flight Controller “Naze32” Seite 11...
- Seite 12 Mini FunFly Flight Controller “Naze32” Seite 12...
- Seite 13 Mini FunFly Flight Controller “Naze32” Seite 13...